Circuits électriques à courants alternatifs stationnaires

Collège du Sud, Bulle
4-ème année OS PAM
Physique et Applications des mathématiques
Chapitre interdisciplinaire
Circuits électriques à
courants alternatifs stationnaires
et nombres complexes
Aspects mathématiques
Á
∼
Á
U
e
R
1
L
1
C
1
R
2
L
2
C
2
Á
∼
Á
U
s
Version pour Mathematica
Edition 2007-2008
Marcel Délèze
www.collegedusud.ch/profs/delezem
1-Circuit_RLC_serie.nb 1
www.deleze.name/~marcel//sec2/applmaths/csud/index.html

üChapitre interdisciplinaire
Les aspects expérimentaux et mathématiques sont traités en parallèle:
- les aspects expérimentaux dans le cadre du cours de Physique;
- les aspects mathématiques dans le cadre du cours d'Applications des mathématiques.
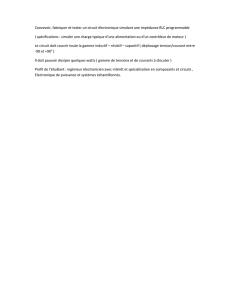
§ 1 Circuits électriques à
courants alternatifs stationnaires
Ce premier paragraphe est essentiellement descriptif. Il s'agit de présenter les phénomènes à étudier et d'assurer la
liaison avec les aspects expérimentaux.
§ 1.1 Préparation:
mouvement circulaire uniforme et mouvement harmonique
Certains éléments de cinématique peuvent nous aider en électricité.
üMouvement circulaire uniforme
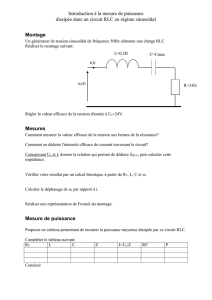
Pour décrire la position à l'instant t d'un objet M
=
M
H
t
L
en rotation circulaire uniforme autour d'un point O, on utilise
l'angle horaire a(t) (voir figure).
a(t) est l'angle orienté entre le vecteur fixe
i
k
j
j
j
1
0
y
{
z
z
z
et le vecteur tournant OM
ö
øø
ø
ø
.
x
y
αHtL
ϕ
ωt
HHtLHH0L
MH0L
MHtL
O
Dans un mouvement circulaire uniforme, la vitesse angulaire w est constante. En particulier, sur l'intervalle de temps
@
0, t
D
,
ω =
∆α
∆
t
=
α
H
t
L
−
α
H
0
L
t
−
0
=
α
H
t
L
−
ϕ
t
où l'angle horaire initial a été noté
a
H
0
L
=
j
. On en déduit que l'angle horaire est une fonction affine du temps
α
H
t
L
= ω t+ ϕ
1-Circuit_RLC_serie.nb 2

où
j
=
angle horaire à l'instant 0,
w
t
=
accroissement de l'angle horaire durant l'intervalle
@
0
,
t
D
et
a
H
t
L
=
angle horaire à l'instant t.
On remarquera la similitude avec l'horaire du mouvement rectiligne uniforme x
H
t
L
=
v t
+
x
0
.
Si le point M tourne dans le sens direct, on a
w
>
0
;
s'il tourne dans le sens rétrograde, alors
w
<
0.
Les coordonnées du point M
H
t
L
sont
x=rcos
H
a
H
t
L
L
y=rsin
H
a
H
t
L
L
Elles correspondent aux équations du mouvement circulaire uniforme
x
H
t
L
=rcos
H
wt+ j
L
y
H
t
L
=rsin
H
wt+ j
L
N
otations
t
=
temps [unité : la seconde]
T
=
période = durée d'un tour [unité : la seconde]
n
=
fréquence = nombre de tours (d'oscillations complètes) par unité de temps
[unité : le tour par seconde = le hertz noté Hz]
w
=
vitesse angulaire = angle parcouru par unité de temps [unité : le radian par seconde noté s
-
1
]
Pour observer le rôle de l'angle horaire initial
j
, calculons les coordonnées du point M
H
0
L
x
H
0
L
=rcos
H
j
L
y
H
0
L
=rsin
H
j
L
Relations
pendant le temps T, l'angle horaire augmente de 2
p
radians et
le nombre de tours effectués est de 1
wT=2p
nT=1
2p n = w
üMouvement harmonique
On appelle mouvement harmonique le mouvement rectiligne obtenu par projection orthogonale du mouvement
circulaire uniforme sur un axe. Par exemple, dans la figure précédente, le mouvement du point H
=
H
H
t
L
est décrit par
x
H
t
L
=rcos
H
wt+ j
L
y
H
t
L
=0
Le graphique du mouvement harmonique, en fonction du temps, est une sinusoïde;
r est l'amplitude,
w est la vitesse angulaire ou pulsation et
j
est la phase initiale.
En physique, le mot phase signifie plus généralement état d'un système; dans notre cas,
j
décrit la position initiale du
mobile.
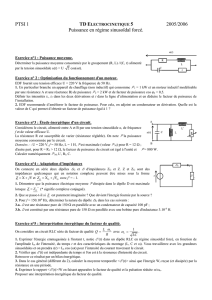
Dans l'exemple qui suit, w = 3; donc T=
2
p
ÅÅÅÅÅÅÅÅ
3
1-Circuit_RLC_serie.nb 3

Plot
A
5 Cos
A
3 t +
π
3
E
,
8
t, 0, 2 π
<
,
Ticks →
9
Range
A
0, 2 π,2π
3
E
, Automatic
=
, AxesLabel →
8
"t", "x"
<
E
;
2π
3
4π
3
2πt
-4
-2
2
4
x
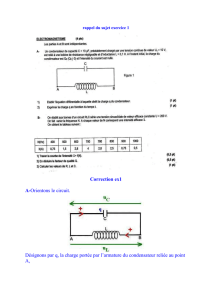
L'amplitude r et la période T peuvent être lues directement dans la figure:
2π
3
4π
3
2π
t
-6
-4
-2
2
4
6
x
T
r
En physique, le mouvement harmonique intervient dans un grand nombre de phénomènes
oscillations mécaniques;
ondes;
rythmes biologiques;
...
Animation mouvement harmonique
1-Circuit_RLC_serie.nb 4

t
yHtLHHtL
Pour animer le graphique précédent:
sur le site http://www.collegedusud.ch/profs/delezem/
suivez les liens Documents Mathematica
/ Annexes: Circuits RLC et nombres complexes;
téléchargez le document 1-1_animation_harmonique.nb
exécutez le cahier (menu: Noyau / Evaluation / Evaluer le cahier);
animez les graphiques (sélectionnez la liste de graphiques puis menu: Cellule / Animer les graphiques sélectionnés).
Observez
* le point H
H
t
L
qui effectue un mouvement circulaire uniforme;
* le point y
H
t
L
qui, sur l'axe vertical, effectue un mouvement harmonique;
* la courbe t
#
y
H
t
L
qui est l'horaire du mouvement harmonique;
* l'angle trigonométrique au centre du cercle qui est la phase (ou l'angle horaire) du mouvement.
üRôle de la phase et déphasage
Considérons deux mouvements harmoniques de même vitesse angulaire
f
H
t
L
=r
1
sin
H
ωt+ ϕ
1
L
g
H
t
L
=r
2
sin
H
ωt+ ϕ
2
L
L'angle horaire est aussi appelé phase:
a
1
H
t
L
=
w
t
+
j
1
est la phase de f à l'instant t;
a
2
H
t
L
=
w
t
+
j
2
est la phase de g à l'instant t;
j
1
=
a
1
H
0
L
est la phase initiale de f;
j
2
=
a
2
H
0
L
est la phase initiale de g.
L'amplitude, la vitesse angulaire et la phase initiale décrivent l'état de l'oscillateur.
La différence des phases est constante:
α
1
H
t
L
− α
2
H
t
L
= ϕ
1
− ϕ
2
La différence des phases est appelée déphasage:
ϕ = ϕ
1
− ϕ
2
Le déphasage représente l'avance de phase de f sur g (on dit "l'avance de phase du premier sur le deuxième").
1-Circuit_RLC_serie.nb 5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
1
/
28
100%