Géométrie affine et euclidienne

Chapitre 25
Géométrie affine et euclidienne
Objectifs
– Définir les notions de : espaces affines, sous-espaces affines, applications affines et leurs propriétés.
– Rappeler la notion de barycentre et définir la notion de convexité.
– Calculer la distance d’un point à un sous-espace affine.
– Étudier les isométries. Faire la classification en dimension 1,2 et 3.
Sommaire
I) Espace affine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1) Translations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2) Sous - espaces affines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3) Parallélisme, orthogonalité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
4) Repères cartésiens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
II) Applications affines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1) Définition, exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2) Propriétés des applications affines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3) Groupe affine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
4) Expression analytique d’une application affine . . . . . . . . . . . . . . . . . . . . . . . 7
III) Barycentres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1) Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2) Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3) Parties convexes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
IV) Isométries affines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1) Calculs de distances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2) Isométries, généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3) Isométries de la droite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4) Isométries du plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5) Isométries de l’espace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
V) Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Dans ce chapitre, Edésigne un R- e.v. de dimension finie.
I) Espace affine
1) Translations
Soit
−→
u∈E
, la translation de vecteur
−→
u
est l’application
1t−→
u
:
E→E
définie par
t−→
u
(
−→
v
) =
−→
u
+
−→
v
.
L’ensemble de ces applications est noté
TE
et il est facile de vérifier que (
TE,◦
)est un groupe abélien, c’est
un sous - groupe du groupe des permutations de E.
1. non linéaire si −→
u6=−→
0 .
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 1

Espace affine Chapitre 25 : Géométrie affine et euclidienne
Si −→
v,−→
wsont deux vecteurs de E, alors il existe un unique vecteur −→
u∈Etel que t−→
u(−→
v) = −→
w. Cette
propriété très simple, suggère un autre point de vue pour les éléments de E : la notion de points.
DÉFINITION 25.1
Un espace affine est un espace vectoriel dont les éléments sont vus tantôt comme des points (lettres
majuscules), tantôt comme des vecteurs (minuscules). D’une façon imagée, on peut dire qu’un point
est la pointe de la flèche d’un vecteur. Si de plus
E
est muni d’un produit scalaire, alors on dira
que (
E,
(
.|.
)) est un espace affine euclidien, dans ce cas, la distance entre deux points
A
et
B
est
d(A,B) = kB−Ak.
La propriété précédente peut alors s’énoncer sous la forme suivante : si
A
et
B
sont deux points de
E
,
alors il existe un unique vecteur
−→
u
tel que B =
t−→
u
(
A
). Ce vecteur
−→
u
est noté :
−→
AB
, on remarquera que
−→
AB =B−A, et que A+−→
AB =B.
−→
AB
A
B
−→
0
FIGURE 25.1: Notion de points
2) Sous - espaces affines
DÉFINITION 25.2
Un sous - espace affine de
E
est l’image d’un s.e.v. de
E
par une translation. Soit
V
une partie de
E
,
V
est un s.e.a. de
E
ssi il existe un s.e.v
V
et un vecteur
−→
u
tel que
V
=
t−→
u<V>
, si c’est le cas,
V
est appelé direction du s.e.a.
V
(ce que l’on écrira : (
V,V
)), et on pose
dim
(
V
) =
dim
(
V
). On
remarquera qu’un s.e.v. est un s.e.a. de direction lui - même.
Propriétés :
–
Si
V
est un s.e.a. de direction
V
, alors
V
est unique (mais pas le vecteur de la translation), de plus
V
est un s.e.v. ssi Vcontient le vecteur nul.
–
Si (
V
,
V
) est un s.e.a. alors
∀A∈ V ,V
=
{A
+
−→
u/−→
u∈V}
, et
V
=
{−→
AB /B∈ V }
, on remarquera
que ∀B∈E,B∈ V ⇐⇒ −→
AB ∈V.
–
Si (
V
,
V
) est un s.e.a. de
E
, alors
V
est un espace affine isomorphe à
V
. C’est à dire que
V
peut être
muni d’une structure d’espace vectoriel isomorphe à V.
–
Si (
V
,
V
) et (
V0
,
V0
) sont deux s.e.a. de
E
, et si
V ∩V0
n’est pas vide, alors
V ∩V0
est un s.e.a de
direction V∩V0.
–
Soient (
V
,
V
) et (
V0
,
V0
) sont deux s.e.a. de
E
, soient
A∈ V
et
A0∈ V 0
, alors
V ∩V06
=
; ⇐⇒ −→
AA0∈
V+V0. On remarquera que la condition est nécessairement remplie lorsque E=V+V0.
Exercice: Étudier les s.e.a. de Elorsque dim(E) = 1, 2, 3.
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 2

Espace affine Chapitre 25 : Géométrie affine et euclidienne
3) Parallélisme, orthogonalité
DÉFINITION 25.3
Soient (
V,V
)et (
V0,V0
)deux s.e.a. de
E
, on dit que
V
est parallèle à
V0
lorsque
V⊂V0
. On dit que
V
et
V0
sont parallèles lorsque
V
=
V0
(même direction). Si
E
est euclidien, on dit que
V
et
V0
sont
orthogonaux lorsque
V
et
V0
sont deux s.e.v. orthogonaux de
E
(
V⊂V0⊥
), si
A∈E
, l’orthogonal à
V
passant par Aest le s.e.a. de Econtenant Aet de direction V⊥.
Propriétés :
–
Deux s.e.a. parallèles sont soit égaux, soit d’intersection vide (on dit qu’ils sont strictement parallèles).
–
Soient (
V,V
)et (
V0,V0
)deux s.e.a. de
E
, si
V
est parallèle à
V0
, alors soit
V ⊂ V 0
, soit
V ∩V0
=
;
.
Exercice: Étudier la position relative de deux s.e.a. en dimension 2 et 3.
4) Repères cartésiens
DÉFINITION 25.4
Un repère cartésien
R
= (
O,−→
e1,. . ., −→
en
)de
E
, est la donnée d’un point
O
de
E
(appelé origine
du repère), et d’une base
B
= (
−→
e1,. . ., −→
en
)de
E
. Si
E
est euclidien et que
B
est une b.o.n.d. de
E
, on dira que le repère
R
est un repère orthonormal direct. Pour tout point
M
de
E
, on appelle
coordonnées de
M
dans le repère
R
, les coordonnées du vecteur
−−→
OM
dans la base
B
. On remarquera
qu’il s’agit des coordonnées de M−Odans la base B.
Représentation(s) paramétrique(s) d’un s.e.a.
: Soit (
V,V
)un s.e.a. de
E
, soit
R
= (
O,B
)un repère
cartésien de
E
, soit
U
= (
−→
v1, . .. , −→
vp
)une base de
V
, et soit
A∈ V
. Notons
Ci
la matrice colonne des
coordonnées du vecteur −→
vidans la base B, et C0la matrice colonne des coordonnées de Adans le repère
R
. Soit
M∈E
, notons
X
la matrice colonne des coordonnées de
M
dans le repère
R
,
M∈ V ⇐⇒ −−→
AM ∈V
ce qui équivaut à :
∃λ1,. . ., λp∈R,X=C0+λ1C1+···+λpCp
Ce système est appelé un paramétrage de V.
Équation(s) cartésienne(s) d’un hyperplan affine
: Soit
R
= (
O,B
)un repère de
E
, avec
dim
(
E
) =
n
, soit (
H,H
)un hyperplan affine de
E
, soit
U
= (
−→
u1,. . ., −→
un−1
)une base de
H
, et soit
A∈ H
.
Un point
M
de coordonnées (
x1,. . ., xn
)appartient à
H
ssi
−−→
AM ∈H
, ce qui revient à dire que la
famille
U ∪{−−→
AM }
est une famille liée, ce qui est encore équivalent à :
detB
(
−→
u1,. . ., −→
un−1,−−→
AM
) = 0, en
développant ce déterminant sur sa dernière colonne, on obtient une équation cartésienne de H de la forme :
a1x1
+
···
+
anxn
=
b
avec au moins un des coefficients
ai
non nul, et
b
une constante. On remarquera
qu’une équation cartésienne de la direction (ie de
H
) est
a1x1
+
···
+
anxn
=0. Si
E
est euclidien et la base
orthonormale, alors une telle équation peut s’écrire à l’aide d’un produit scalaire : (
−→
u|−−→
AM
) = 0 où
−→
u
, de
coordonnées (a1,. .., an), est un vecteur normal à H.
Exercice
: Montrer que la réciproque est vraie, c’est à dire que les points de coordonnées (
x1,..., xn
)vérifiant une
équation du type
a1x1
+
···
+
anxn
=
b
avec au moins un des coefficients
ai
non nul, forment un hyperplan affine de
direction l’hyperplan vectoriel d’équation cartésienne a1x1+···+anxn=0.
Changement de repère
: Soient
R
= (
O,B
)et
R0
= (
O0,B0
)deux repères cartésiens de
E
, notons
P
la matrice de passage de
B
à
B0
. Soit
M∈E
, soit
X
la matrice colonne des coordonnées de
M
dans
le repère
R
, et
X0
dans le repère
R0
. On a
X
=
CoordB
(
−−→
OM
) =
CoordB
(
−−→
OO0
) +
CoordB
(
−−→
O0M
) =
CoordB(−−→
OO0) + P×CoordB0(−−→
O0M), c’est à dire :
X=CoordR(O0) + P×X0et donc X0=CoordR0(O) + P−1×X.
Cas particuliers : Si on change seulement d’origine, alors
P
=
In
et donc
X0
=
CoordR0
(
O
) +
X
. Si on
garde la même origine et que l’on change de base, alors X0=P−1×X.
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 3

Applications affines Chapitre 25 : Géométrie affine et euclidienne
II) Applications affines
1) Définition, exemples
DÉFINITION 25.5
Soit
E
et
F
deux
R
e.v. et soit
f
:
E→F
une application, on dit que
f
est une application affine
lorsqu’il existe
−→
u∈F
et
g∈ L
(
E,F
)tels que :
f
=
t−→
u◦g
. C’est à dire :
∀M∈E,f
(
M
) =
−→
u
+
g
(
M
).
Lorsque F=R, on dit que fest une forme affine.
Exemples:
– Il découle de la définition qu’une application linéaire est une application affine.
– De même, une translation est une application affine et sa partie linéaire est l’identité.
THÉORÈME 25.1
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Si
f
:
E→F
est affine, alors on sait qu’il existe
−→
u∈F
et
g∈ L
(
E,F
)tels que
f
=
t−→
u◦g
. Le
vecteur
−→
u
est unique (
−→
u
=
f
(
−→
0
)), et l’application linéaire
g
est unique, on la notera :
Lf
(partie
linéaire de
f
), de plus, on a la relation suivante :
∀A,M∈E,−−−−−−→
f(A)f(M)
=
Lf
(
−−→
AM
), ou encore :
∀A,M∈E,f
(
M
) =
f
(
A
) +
Lf
(
−−→
AM
), ou encore :
∀A∈E,∀−→
u∈E,f
(
A
+
−→
u
) =
f
(
A
) +
Lf
(
−→
u
)
.
De
plus, si
A∈E
,
f
possède des points fixes ssi
−−−→
Af (A)∈Im
(
Lf−id
), auquel cas l’ensemble des points
fixes de f(noté Inv(f)) est un s.e.a. de direction ker(Lf−id).
Preuve
:
g
étant linéaire, on a
g
(
−→
0
) =
−→
0
, donc
−→
u
=
f
(
−→
0
)ce qui prouve l’unicité de
−→
u
. Mais alors
g
=
t−−→
u◦f
ce
qui prouve l’unicité de g. Soit A,M∈E,f(M)−f(A) = −→
u+g(M)−−→
u−g(A) = g(M−A) = g(−−→
AM ).
f
(
M
) =
M⇐⇒ f
(
A
) +
Lf
(
−−→
AM
) =
M⇐⇒ −−−→
Af (A)
= (
id −Lf
)(
−−→
AM
). Si c’est le cas et si
A
désigne un point fixe,
alors M∈Inv(f)⇐⇒ M−A=−→
u+Lf(M)−[−→
u+Lf(A)] = Lf(M−A).
Exemple
: homothéties affines. Si
Lf
=
hλ
=
λid
une homothétie vectorielle (
λ∈R\{
0;1
}
), soit
−→
u∈E
et
f
=
t−→
u◦hλ
.
id −h
est une homothétie de rapport 1
−λ6
=0, c’est un automorphisme de
E
, donc
f
possède un unique point fixe :
C
. On a alors
M0
=
f
(
M
)
⇐⇒ M0−C
=
M0−C0
=
h
(
M−C
)i.e.
−−→
C M0
=
λ−−→
C M
, on dit que
f
est l’homothétie de
centre Cet de rapport λ.
2) Propriétés des applications affines
–
Une application affine
f
est entièrement déterminée par la donnée d’un point
O
et son image
O0=f(O), et la partie linéaire Lf.
–
Soient
f
:
E→F
et
g
:
F→G
deux applications affines, alors
f◦g
est une application affine de
E
vers G, et Lf◦g=Lf◦Lg.
–
Soit
f
:
E→F
une application affine, soit (
H,H
)un s.e.a. de
E
, alors
f<H>
est un s.e.a. de
F
de
direction Lf<H>.
–
Une application affine transforme trois points alignés en trois points alignés, et conserve le parallé-
lisme.
–
Soit
f
:
E→E
une application affine et soit
A∈E
, il existe un unique vecteur
−→
u∈E
et une unique
application affine gtels que : f=t−→
u◦gavec g(A) = A.
Exemples:
–
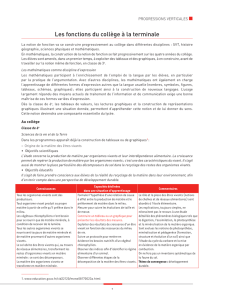
Projection affine : si
p
est affine de
E
vers
E
et si
p◦p
=
p
, alors
Lp◦Lp
=
Lp
donc
Lp
est une projection
vectorielle sur
F
=
ker
(
Lp−id
)parallèlement à
G
=
ker
(
Lp
), alors
Im
(
p−id
) =
ker
(
p
) =
G
. Soit
A
un point et
A0
son image, alors
p
(
A0
) =
A0
,
A0
est donc invariant, on en déduit que
−→
AA0∈Im
(
Lp−idE
) =
ker
(
Lp
)et que
l’ensemble des invariants de
p
est le s.e.a.
F
passant par
A
et dirigé par
F
=
ker
(
Lp−idE
),
A0
appartient au
s.e.a. passant par Aet de direction G, si on note GAcelui-ci, alors {A0}=GA∩F. On dit que :
pest la projection affine sur Fet parallèlement à G.
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 4

Applications affines Chapitre 25 : Géométrie affine et euclidienne
−→
0
G=ker(Lp)
GA
F=ker(Lp−id)
F=Inv(p)
A
A0=p(A)
FIGURE 25.2: Projection affine
–
Symétrie affine : si
s
est affine de
E
vers
E
et si
s◦s
=
idE
, alors
Ls◦Ls
=
idE
donc
Ls
est une symétrie vectorielle
par rapport à
F
=
ker
(
Ls−id
)et parallèlement à
G
=
ker
(
Ls
+
id
), et on a
Im
(
Ls−id
) =
ker
(
Ls
+
id
) =
G
.
Soit
A∈E
et
A0
son image, on a
−→
AA0
=
−−−−−→
s(A0)s(A)
=
Ls
(
−→
A0A
), donc
−→
AA0∈G
, on en déduit que
s
à des points
invariants, si on pose
I
le milieu de [
A,A0
], alors
−→
AI ∈G
donc
−−→
A0I0
=
−−→
AI
=
−→
A0I
et donc
I0
=
I
: c’est un point
invariant, on en déduit que l’ensemble des points invariants est le s.e.a.
F
passant par
I
et dirigé par
F
. On dit
que :
sest la symétrie affine par rapport à Fet parallèlement à G.
−→
0
G=ker(Ls+id)
F=ker(Ls−id)
F=Inv(s)
A
I=p(A)
A0=s(A)
FIGURE 25.3: Symétrie affine
3) Groupe affine
DÉFINITION 25.6
On dit que
f
:
E→F
est un isomorphisme affine de
E
vers
F
lorsque
f
est affine et bijective. Lorsque
F
=
E
, on dit que
f
est un automorphisme affine de
E
, l’ensemble des automorphismes affines de
E
est noté GA(E)et appelé groupe affine de E. On remarquera que G L(E)⊂GA(E).
Exemples:
– Une translation est un automorphisme affine.
– Une homothétie de centre Cet de rapport non nul λ, est un automorphisme affine.
– Une projection affine qui n’est pas idEn’est pas un automorphisme affine.
– Une symétrie affine est un automorphisme affine.
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 5
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%