Travaux Dirigés d`Electromagnétisme 2010 – 2011

Travaux Dirigés d’Electromagnétisme
Préparation à l’agrégation de Montrouge
2010 – 2011


Table des matières
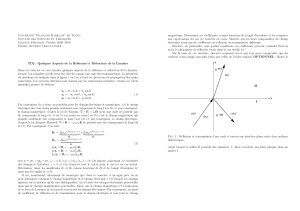
1 TD1 : Énoncé 1.0
Exercice1 Généralités .................................... 1.1
Exercice 2 Sphère sous influence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1
Exercice 3 Interaction molécule-paroi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1
Exercice 4 Aspects électromagnétiques de la propagation d’ondes sur une ligne coaxiale . 1.2
Partie 1Étude électrostatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2
Partie 2Étude magnétostatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2
Partie 3Étude en régime variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2
Partie 4Modèle à constantes réparties (non faite en TD) . . . . . . . . . . . . . . . . . . 1.3
Partie5Réflexiondesondes ................................ 1.3
2 TD1 : Corrigé 1.C-0
Exercice1 Généralités .................................... 1.C-1
Exercice 2 Sphère sous influence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.C-1
Exercice 3 Interaction molécule-paroi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.C-3
Exercice 4 Aspects électromagnétiques de la propagation d’onde sur une ligne coaxiale . . 1.C-5
Partie 1Étude électrostatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.C-5
Partie 2Étude magnétostatqiue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.C-6
Partie 3Étude en régime variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.C-8
Partie 4Modèle à constantes réparties . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.C-10
Partie 5Réflexion des ondes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.C-10
3 TD2 : Énoncé 2.0
Induction ............................................... 2.1
Exercice1 Généralités .................................... 2.1
Exercice 2 Force de Laplace et moteur synchrone . . . . . . . . . . . . . . . . . . . . . . 2.1
Exercice 3 Oscillateurs mécaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1
Exercice 4 Courants de Foucault . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2
Ondes ´
electromagn´
etiques ..................................... 2.2
Exercice 5 Pression de radiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2
Exercice 6 Polarisation et photon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3
Exercice 7 Ondes évanescentes - Épaisseur de peau . . . . . . . . . . . . . . . . . . . . . 2.4
4 TD2 : Corrigé 2.C-0
Induction ............................................... 2.C-1
Exercice1 Généralités .................................... 2.C-1
Exercice 2 Force de Laplace et moteur synchrone . . . . . . . . . . . . . . . . . . . . . . 2.C-2
Exercice 3 Oscillateurs mécaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.C-4
Exercice 4 Courants de Foucault . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.C-5
Ondes ´
electromagn´
etiques ..................................... 2.C-7
Exercice 5 Pression de radiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.C-7
Exercice 6 Polarisation et photon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.C-12
Exercice 7 Ondes évanescentes - Épaisseur de peau . . . . . . . . . . . . . . . . . . . . . 2.C-15
1.2

5 TD3 : Énoncé 3.0
Relativit´
e restreinte ........................................ 3.1
Exercice 1 Collisions élastiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1
Exercice 2 Collisions inélastiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1
Partie 1Notion de centre de masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1
Partie 2Matérialisation de photons par création de paire e−e+............... 3.1
Charges et champ magn´
etique .................................... 3.2
Exercice 3 Mouvement d’un particule chargée dans un champ magnétique uniforme . . . 3.2
Exercice 4 Piégeage d’un électron dans le champ magnétique terrestre – Aurores boréales 3.2
6 TD3 : Corrigé 3.C-0
Relativit´
e restreinte ........................................ 3.C-1
Exercice 1 Collisions élastiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.C-1
Exercice 2 Collisions inélastiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.C-2
Partie 1Notion de centre de masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.C-2
Partie 2Matérialisation de photons par création de paires e−e+.............. 3.C-3
Charges et champ magn´
etique .................................... 3.C-4
Exercice 3 Mouvement d’une particule chargée dans un champ magnétique uniforme . . . 3.C-4
Exercice 4 Piégeage d’un électron dans le champ magnétique terrestre – Aurores boréales 3.C-5
1.3

Énoncé – TD n◦1
Sommaire
Exercice1 Généralités................................... 1.1
Exercice 2 Sphère sous influence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1
Exercice 3 Interaction molécule-paroi . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1
Exercice 4 Aspects électromagnétiques de la propagation d’ondes sur une ligne co-
axiale...................................... 1.2
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
1
/
60
100%