Cinématique du point Vecteur vitesse – Vecteur accélération

Complément leçon n°6 : Vecteur vitesse – Vecteur accélération PHR 101
1 N. FOURATI_ENNOURI
Cinématique du point
Vecteur vitesse – Vecteur accélération
1. Vecteur vitesse
1.1. Vecteur vitesse moyenne
Soit un mobile M se déplaçant sur une trajectoire (C). Le même déplacement de M entre deux
positions peut se faire pendant des durées différentes. Pour caractériser un mouvement, il peut
être intéressant de connaître la distance parcourue par unité de temps, c'est-à-dire la vitesse
moyenne. Si la position du point M à l’instant t1 correspond au point M(t1) = M1 et à l’instant
t2 au point M(t2) = M2, le vecteur vitesse moyenne se définit par :
12 2 1
m
M M OM OM
Vtt
−
==
ΔΔ
JJJJJJG JJJJJG JJJJJG
JJJG
[3.1]
Exemple :
Un cycliste conduit son vélo sur 200 m, puis revient sur son chemin sur
40 m. S’il a mis 60 s pour effectuer son parcours, trouvez sa vitesse
moyenne Vm.
Solution
La distance totale parcourue Δd = 200 + 40 = 240 m
Le temps de parcours : Δt = 60 s
La vitesse moyenne : 1
m
d 240
V4m.s
t60
−
Δ
===
Δ

Complément leçon n°6 : Vecteur vitesse – Vecteur accélération PHR 101
2 N. FOURATI_ENNOURI
1.2. Vecteur vitesse instantané
Lorsqu’on considère une durée Δt infiniment petite, le mobile passe d’un point M à un point
M’ infiniment proche.
La vitesse moyenne tend vers la vitesse instantanée lorsque Δt tend vers zéro.
Le vecteur position
()
OM OM t=
J
JJJGJJJJG
est une fonction du temps et la vitesse instantanée
correspond alors à la dérivée par rapport au temps du vecteur position :
()
(
)
(
)
t0
OM t t OM t dOM
Vt lim tdt
Δ→
+Δ −
==
Δ
JJJJG JJJJG
J
JJJG
J
G
[3.2]
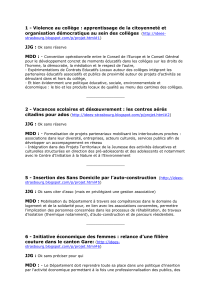
Lorsque le point M tend vers le point M’, la corde MM’ tend vers la tangente à la trajectoire
au point M. Le vecteur vitesse est donc un vecteur tangent à la trajectoire au point considéré
(Figure. 1)
z'
y'
x'
O
M
i
j
kT
v
M(t)
M(t+dt)
dM
s(t+dt)=s(t)+ds
s(t)
z'
y'
x'
O
M
i
j
kT
v
M(t)
M(t+dt)
dM
s(t+dt)=s(t)+ds
s(t)
Figure. 1
Nous désignerons par :
TT(t);T 1
=
=
G
GG
le vecteur unitaire tangent à la trajectoire à chaque instant : V
TV
=
G
G
G

Complément leçon n°6 : Vecteur vitesse – Vecteur accélération PHR 101
3 N. FOURATI_ENNOURI
1.3. Expression en coordonnées cartésiennes
A partir de l’expression du vecteur position r
G
[2.1] et de la définition du vecteur vitesse [3.2],
on obtient :
dr vxiyjzk
dt == ++
G
G
GG
G
[3.3]
La valeur V de la vitesse correspond à la norme de ce vecteur :
222
Vv x y z== ++
G
[3.4]
1.4. Expression en coordonnées polaires
A partir de l’expression du vecteur position r
G
[2.2] et de la définition du vecteur vitesse [3.2],
on obtient :
()
OM
v== =+
J
JJJGJJG
J
JGJJG
Gr
rr
dd drdu
ru u r
dt dt dt dt [3.5]
Lorsque le point M est en mouvement, l’angle polaire θ = θ(t) est une fonction du temps. Le
vecteur unitaire r
u
JJG
tourne et est donc fonction du temps par l’intermédiaire de l’angle.
Pour le dériver par rapport au temps, il faut appliquer les règles de dérivation des fonctions
composées. Dans notre cas :
=×=
JJGJJGJJG
rr r
du du d du
dt d dt d
θθ
θ
θ
[3.6]
La quantité θ
caractérise la variation de l’angle polaire au cours du temps et correspond à la
définition de la vitesse angulaire. Elle est souvent notée ω et s’exprime en rad.s-1.
Dans le repère choisi :
cos sin sin cos=+ ⇒=−+ =
J
JJJG
JJGJJG
GG G G
r
rdu
uij i ju
d
θ
θθ θ θ
θ

Complément leçon n°6 : Vecteur vitesse – Vecteur accélération PHR 101
4 N. FOURATI_ENNOURI
Par conséquent :
v=+ = +
JJGJJGJJGJJG
G
rrr
ru r u V u V u
θ
θθ
θ
[3.7]
Vr et Vθ sont respectivement les composantes radiales et orthoradiales du vecteur vitesse dans
la base polaire. La norme de ce vecteur est :
()
2
2
Vv r r
=
=+θ
G
[3.8]
1.5. Expression en coordonnées cylindriques
Les coordonnées cylindriques correspondent aux coordonnées polaires dans le plan (o, x, y)
auxquelles on ajoute une coordonnée z suivant un axe perpendiculaire au plan. La base
associée est donc composée de la base tournante
(
)
r
u,u
θ
J
JGJJG
et du vecteur z
u
JJG
(3eme vecteur de
la base cartésienne qui est un vecteur fixe dans le référentiel d’étude.
En dérivant le vecteur position r
G
[2.7], on obtient :
()
OM
v== +
J
JJJG
J
JGJJG
G
rz
dd
ru zu
dt dt [3.9]
En tenant compte des résultats du paragraphe précédent, l’équation [3.9] peut s’écrire sous le
forme de :
OM
v==++
J
JJJG
J
JGJJGJJG
G
rz
dru r u zu
dt
θ
θ
[3.10]
Et :
()
2
22
Vv r r z==+θ+
G
[3.11]

Complément leçon n°6 : Vecteur vitesse – Vecteur accélération PHR 101
5 N. FOURATI_ENNOURI
1.6. Vecteur vitesse angulaire
En physique, et plus spécifiquement en mécanique, la vitesse angulaire ω, aussi appelée
fréquence angulaire ou pulsation, est une mesure de la vitesse de rotation. Elle s'exprime dans
le système international en radians par seconde (rad.s-1), ou plus simplement en s-1 puisque les
angles sont des grandeurs sans dimension ; elle reste de manière courante donnée en tours par
minute (tr/min). Une révolution complète est égale à 2π radians, donc :
22
θ
π
ω
===π
d
f
dt T [3.12]
T est la période de rotation (en s) et f est la fréquence (en s-1 ou Hz).
L'utilisation de la vitesse angulaire au lieu de la fréquence ordinaire est pratique dans maintes
applications car elle permet d'éviter l'apparition excessive de π. Elle est utilisée, entre autres,
dans de nombreux domaines de la physique comme la mécanique quantique et
l'électromagnétisme.
Le vecteur vitesse angulaire est un vecteur :
• normal au plan de rotation,
• orienté de sorte que le mouvement se fasse dans le sens positif,
• dont la norme vaut ω.
On a donc :
zz
uu
ω
=ω =θ
J
JGJJG
G
[3.13]
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%