Cinématique classique du point matériel

O j
G
i
G
k
G
M(t)
x(t)
y(t)
z(t)
Cinématique classique du point matériel
En mécanique, on définit toujours en premier ………………………………………… qu’on note entre
accolade : ………………………….
Il faut dans un second temps définir ……………………………………………………….. (par rapport à
quoi on étudie le mouvement du {système})
Un référentiel est constitué …………………………………………………… auquel on associe un repère
d’espace en trois dimensions et une ………………………………. (repère de temps).
Un référentiel est dit galiléen s’il est ……………………………. et / ou s’il est en mouvement
……………………………………………………………………. par rapport à un autre référentiel galiléen.
Les vecteurs utilisés pour caractériser le mouvement d’un point sont :
- le vecteur position : OM
JJJJG
- le vecteur vitesse : dOM
vdt
=
JJJJG
G, ce vecteur est toujours tangent à la trajectoire.
- le vecteur accélération :
2
2
dOM dv
adt dt
==
JJJJGG
G
L’ensemble des positions successives d’un point dans un référentiel s’appelle ……………………………….
du point.
La …………………………………. d’un point dépend du référentiel d’étude (on parle donc de relativité du
mouvement).
La dernière étape consistera à faire le …………………………………………………………… au système
dans le référentiel d’étude.
À chaque forces, on associe un vecteur force (dynamique)
La cinématique est l’étude du mouvement d’un corps indépendamment des causes et des effets.
La dynamique explique donc les causes du mouvement d’un corps
Voici 3 types de repère d’espace qui sont couramment utilisés en mécanique newtonienne :
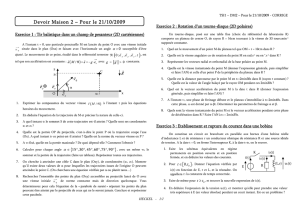
I. Coordonnées cartésiennes
C’est un système de coordonnées qui s’appuie sur le repère
d’espace composé des trois directions « classiques » de
l’espace.
On le choisit orthonormé (les directions sont perpendiculaires
entre elles et portent chacune un vecteur directeur de norme
égale à 1) et direct (sens inverse des aiguilles d’une montre) :
()
O,i, j,k
GG G
• Dans ce repère d’espace, l’expression du vecteur position
est :
OM .....................................=
JJJJG
Il ne faut pas perdre de vue que le vecteur position dépend du temps et que ses coordonnées (x,y,z)
dépendent donc du temps.
Dans ce repère les vecteurs unitaires
()
i, j,k
GG G
ne varient pas au cours du temps (mêmes direction et sens)
donc
………………………………………………….

O j
G
i
G
k
G
M(t)
xM
yM
zM
θ
u
JJG
θ
i
G
j
G
r
u
JJG
θ
O
• Le vecteur vitesse a pour expression :
v ....................................=
G où
dx
xdt
=
, dy
ydt
=
et dz
zdt
=
• Le vecteur accélération a pour expression :
a ........................................=
G où
2
2
dx
xdt
=
,
2
2
dy
ydt
=
et
2
2
dz
zdt
=
Pour pouvoir utiliser ce système de coordonnées il faut connaître à chaque instant les coordonnées
x(t), y(t) et z(t) du point M !
(OK pour mouvement rectiligne mais difficile pour les autres mouvements !)
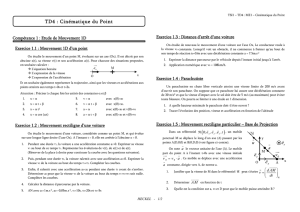
II. Coordonnées cylindriques
C’est un système de coordonnées qui est utilisé pour étudier
les mouvements hélicoïdaux par exemple.
Dans ce système de coordonnées :
Le projeté du point M dans le plan (O,x,y) est noté M’;
• La distance entre le centre O du repère cartésien et le point
M’ se note r.
• L’angle orienté entre (Ox) et (OM’) est noté θ : cet angle
varie au cours du temps (θ(t)).
On définit un repère d’espace cylindrique centré au point M’ dont les vecteurs unitaires sont :
- r
u
JJG : dirigé selon OM’
- θ
u
JJG : perpendiculaire à r
u
JJG et orienté selon θ(t)
- k
G : identique au vecteur unitaire du repère cartésien.
Le vecteur position, le vecteur vitesse et le vecteur accélération sont définis selon 3 variables qui dépendent
du temps : r(t), θ(t) et z(t).
Exprimons les vecteurs unitaires r
u
JJGet θ
u
JJG dans le repère cartésien
(
)
O,i, j,k
G
GG :
- r
u ..................................=
JJG
- θ
u ..................................=
JJG
On voit que θ
u .................=
J
JG et r
u ........................=
J
JG
r
du .........................
dt =
JJG
soit r
du ......................
dt =
J
JG
θ
du ..........................
dt =
JJG
soit θ
du .....................
dt =
J
JG
Remarque : dθθ
dt = est appelé vitesse angulaire qui est souvent noté ω donc :
r
du ............
dt =
JJG
et θ
du ....................
dt =
J
JG

i
G
j
G
M
O
xM
yM
Ainsi :
¾ OM ...............................=
JJJJG
¾ v ...............................=
G donc v ......................................=
G
Si r = R = Cste alors v = ...................................
G
¾ a .........................................................................=
G
a ................................................................................=
G
a ................................................................................=
G
a .................................................................=
G
Si r = R = Cste alors a = ..................................................
G
Ce système de coordonnées permet de simplifier l’écriture des vecteurs position, vitesse et accélération par
rapport au système de coordonnées cartésiennes.
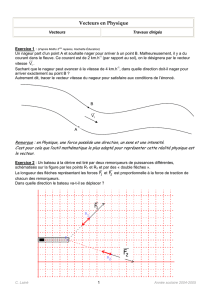
III. Coordonnées polaires
C’est un cas particulier du système de coordonnées cylindriques :
z = cste, le mouvement est plan !
Ainsi :
¾ OM ..................=
JJJJG
¾ v ................................=
G
Si r = R = Cste alors v ....................=
G : le mouvement est alors ………………………. !
La vitesse d’un mouvement circulaire quelconque se note sous la forme :
v .................=
G
où θ
Tu
=
J
GJJG appelé vecteur tangentiel
La norme du vecteur vitesse est donc : v ...............
=
¾
a .........................................................=
G
Si r = R = Cste alors a .......................................=
G : le mouvement est alors …………………. !
L’accélération d’un mouvement circulaire quelconque se note alors sous la forme :
a ............................................=
G avec r
Nu
=
−
J
GJJG appelé vecteur normal
Comme v R θ
=⋅
alors 2
v ....................= ainsi 2
θ.........................=
alors dv .........................
dt =

On peut donc écrire l’accélération d’un mouvement circulaire quelconque :
a .............................................................
=
G
soit : a .......................................
=
G
Si le mouvement est circulaire et uniforme (v = Cste) alors cette expression devient :
a ..................=
G
On parle de mouvement à accélération centrale si le terme correspondant à l’accélération orthoradiale
(selon θ
u
JJG
) est nul (l’accélération n’a qu’une composante dirigée vers le centre donc vers r
u
JJG) donc :
....................................... ,
en multipliant l’ensemble par r on a toujours : ....................................
or
()
2
dθ..............................................
dt
⋅=
r et .................................................
donc
(
)
2
dθ................
dt
⋅=
r
ainsi pour un mouvement à accélération centrale on a ...............................
Si r = R = Cste alors ............................ ce qui implique que .......................... → la vitesse angulaire est
constante.
Le mouvement est alors ………………….. (R = Cste) et ……………………….. (R·ω = Cste) !
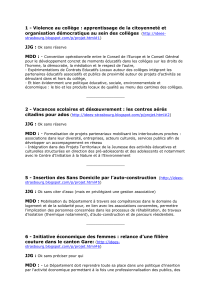
Application :
Un satellite artificiel M tournant autour de la Terre est repéré par ses coordonnées polaires dans le référentiel
terrestre. Sa trajectoire est une ellipse d’équation : r1cosθ
=+⋅
p
e
où p et e sont des constantes caractéristiques de l’ellipse.
Données : vP = 8 640 km·s−1
1) Exprimer p et e en fonction de rA et de rP. Faire l’application
numérique.
2) Dans ce type de mouvement, l’accélération est radiale.
Montrer qu’alors : 2
rθC
⋅
=
où C est une constante. Donner
la valeur de C.
3) Exprimer vA, vitesse de M au point A. Faire l’application numérique.
θ
1
/
4
100%