Cinematique du solide - Académie de Nancy-Metz

Spé
ATS COURS
Lycée P. Mendès France Epinal
Cinématique du solide 2014 - Etudiant.docx 1/22

Spé
ATS COURS
Lycée P. Mendès France Epinal
Cinématique du solide 2014 - Etudiant.docx 2/22
SOMMAIRE
Cinématique du solide ................................................................................................................................... 3
1. Modélisation des pièces mécaniques : ............................................................................................... 3
a. Solide déformable en petites déformations : ........................................................................................ 3
b. Solide déformable en grandes déformations : ...................................................................................... 3
c. Solide déformable en surface : .............................................................................................................. 4
d. Solide indéformable :............................................................................................................................. 4
2. Position relative de deux solides, notion de point appartenant au solide. .......................................... 5
a. Position relative de deux solides : ......................................................................................................... 5
b. Point lié à un solide : .............................................................................................................................. 5
c. Contact ponctuel entre deux solides : ................................................................................................... 6
3. Champ des vecteurs vitesse des points d'un solide : ........................................................................... 7
a. Equiprojectivité du champ des vitesses d'un solide : ............................................................................ 7
b. Torseur distributeur des vitesses : ......................................................................................................... 7
c. Opérations sur les torseurs : .................................................................................................................. 8
d. Application : ......................................................................................................................................... 10
4. Mouvements particuliers : ............................................................................................................... 12
a. Mouvement de translation : ................................................................................................................ 12
b. Mouvement de rotation : .................................................................................................................... 13
c. Trajectoires, vecteurs vitesse et accélération dans les mouvements particuliers : ............................ 13
5. Composition des mouvements de solides : ...................................................................................... 14
a. Composition des vecteurs vitesse : ..................................................................................................... 14
b. Application : ......................................................................................................................................... 15
c. Composition des torseurs distributeurs des vitesses d'un solide : ...................................................... 16
d. Etude cinématique du contact ponctuel entre deux solides : ............................................................. 17
6. Etude de mouvements plans de solides : ......................................................................................... 18
a. Réduction d'un mouvement plan sur plan : ........................................................................................ 18
b. Centre instantané de rotation : ........................................................................................................... 19
c. Exploitation graphique du C.I.R. : ........................................................................................................ 20
d. Base et roulante : ................................................................................................................................. 22

Spé
ATS COURS
Lycée P. Mendès France Epinal
Cinématique du solide 2014 - Etudiant.docx 3/22
S
1
S
0
A
0
A
1
F
CINEMATIQUE DU SOLIDE
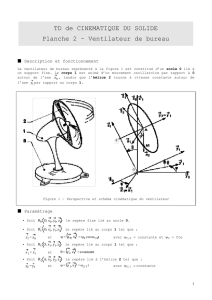
Problématique : L'objectif de la cinématique est de comprendre et de définir les relations entre les
mouvements des pièces principales d'un mécanisme.
1. MODELISATION DES PIECES MECANIQUES :
La modélisation des pièces d’un système, d’un mécanisme est fonction de l’étude que l’on envisage de
faire. Suivant les hypothèses retenues, on peut avoir:
a. Solide déformable en petites déformations :
Les théories développées en élasticité et en résistance des matériaux posent entre autre pour
hypothèses que les pièces étudiées sont déformables, mais que ces déformations et les déplacements associés
demeurent petits.
Exemple d’une poutre encastrée :
Sous l’effet de
F
, la poutre se déforme et la section droite S0 se déplace vers une nouvelle
position S1.
L’étude des efforts de cohésion est faite en supposant la poutre non déformée, ce qui revient à
ne pas considérer le déplacement de la section S0 lors de cette étude.
b. Solide déformable en grandes déformations :
Lorsque les déformations d’une pièce sont importantes par rapport à ses dimensions,
il devient impossible de les négliger. C’est le cas lors d’une étude d’un poteau lorsque l’effort
dépasse une valeur critique, la déformation augmente de façon très importante, provoquant
son effondrement. C’est du flambage, et cette sollicitation ne peut être étudiée qu’à
condition de prendre en compte les déformations.

Spé
ATS COURS
Lycée P. Mendès France Epinal
Cinématique du solide 2014 - Etudiant.docx 4/22
c. Solide déformable en surface :
Ce modèle est souvent utilisé dans l’étude des actions de contact entre deux pièces d’un mécanisme.
On considère alors que le solide reste globalement rigide, à l’exception de la zone située au voisinage immédiat
de la surface de contact avec la pièce voisine dont la déformation, bien que faible, est prise en considération.
Exemple des essais de dureté :
Type d'essai
Observations
Essai Brinell - HB
Le pénétrateur est une bille en acier trempé ou carbure de
tungstène de
D sous une charge F en Newtons maintenue
15 secondes. On mesure le "d" de l'empreinte (d doit être
compris entre 0,2 et 0,5xD). K=30 pour les aciers.
Essai Rockwell C - HRC
Le pénétrateur est un cône de diamant de 120° d'angle et de
charge égale à 1373 N. On mesure l'accroissement "e" en
profondeur ou enfoncement rémanent.
Essai Rockwell B - HRB
Le pénétrateur est une bille en acier trempé de 1,6 mm de
diamètre et de charge égale à 883 N. On mesure
l'accroissement "e" en profondeur ou enfoncement
rémanent.
Essai Vickers - HV
Le pénétrateur est une pyramide droite à base carrée et
d'angle au sommet de 136° sous une charge F. On mesure les
diagonales "d" de l'empreinte.
d. Solide indéformable :
On est souvent amené à supposer négligeables les déformations des pièces d’un mécanisme lors d’une
étude géométrique ou cinématique de celui-ci. Cela est exprimé par le fait que la distance entre deux points
quelconques A et B ∈ au solide est constante au cours du temps:
distance (A,B) = Cte
L’absence de déformations va nous permettre:
- de lier un repère à la pièce considérée et dans ce cas la position d’un point quelconque de la
pièce est constante dans ce repère
- distance (A,B) = Cte va nous permettre de représenter le champ des vitesses des points d’un
solide par un torseur.
Cette modélisation exclut naturellement les fluides, ainsi que les pièces qui subissent de grandes
déformations, comme les ressorts, les courroies de transmission.

Spé
ATS COURS
Lycée P. Mendès France Epinal
Cinématique du solide 2014 - Etudiant.docx 5/22
2. POSITION RELATIVE DE DEUX SOLIDES, NOTION DE POINT APPARTENANT AU SOLIDE.
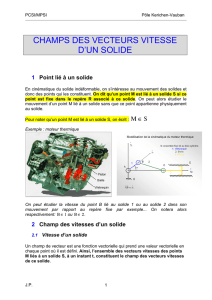
a. Position relative de deux solides :
Dans un repère la position relative des axes est invariante au cours du temps, c'est pourquoi un repère
est équivalent à un solide.
De ce fait l'étude du mouvement du solide S2 par rapport au solide S1 est identique à l'étude du
mouvement du repère R2 lié au solide S2, par rapport au repère R1, lié au solide S1.
Positionner le solide S2 par rapport au solide S1, revient à positionner le repère
( )
22222 z,y,x,OR
lié au
solide S2 par rapport au repère
( )
11111
z,y,x,OR
lié au solide S1.
On suppose pour le moment qu'il n'y a aucune liaison entre les deux solides S1 et S2.
b. Point lié à un solide :
Considérons un point P d'un solide 1 en mouvement par rapport à un repère R. Ce point appartient
naturellement au solide, c'est à dire qu'à chaque instant il est lié au solide.
Pour mettre en évidence cette propriété, on note le vecteur vitesse et le vecteur accélération du point
P par rapport au repère R, à la date t :
)R/1P(V ∈
ou
R/1,P
V
et
)R/1P( ∈Γ
ou
R/1,P
Γ
.
Considérons un point M naturellement lié à un autre solide 2 en mouvement par rapport au repère R
et au solide 1.
On peut être amené à calculer, à l'instant t, le vecteur vitesse ou le vecteur accélération du point M
par rapport au repère R, lié à l'instant t au solide 1 (on dira supposé appartenant) :
)R/1M(
V∈
et
)R/1M( ∈Γ
.
Nous verrons que le calcul du vecteur vitesse ou du vecteur accélération ne se fait pas de la même
façon si le point appartient naturellement au solide, ou si le point est supposé lié à l'instant t au solide.
1
x
1
y
1
z
1
O
2
z
2
y
2
x
2
O
R1
R2
O
1
2
3
•
P
M
•
1
1
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%