Table des matières - Pages personnelles Université Rennes 2

Table des matières
1 Espérance conditionnelle 1
1.1 Casdiscret .............................................. 1
1.2 Casabsolumentcontinu ....................................... 7
1.3 Applications.............................................. 14
1.3.1 Probabilités conditionnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3.2 Larégression ......................................... 15
1.4 Interprétation géométrique de l’espérance conditionnelle . . . . . . . . . . . . . . . . . . . . . 19
2 Vecteurs gaussiens et conditionnement 23
2.1 Rappels sur les vecteurs gaussiens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1.1 variablesgaussiennes..................................... 23
2.1.2 Vecteursgaussiens ...................................... 24
2.2 Conditionnement des vecteurs gaussiens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.1 Conditionnement pour un couple gaussien . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.2 Hyperplanderégression ................................... 34
2.2.3 Espérance conditionnelle gaussienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
i

ii

Chapitre 1
Espérance conditionnelle
1.1 Cas discret
On considère un couple aléatoire discret (X, Y ), c’est-à-dire une application mesurable
(X, Y )(Ω,F,P)→×
ω7→ (X(ω), Y (ω))
où = (xi)i∈Iet = (yj)j∈Jsont deux ensembles finis ou dénombrables.
La probabilité de tomber sur un couple (xi, yj)est :
pij =P(X=xi, Y =yj).
La suite double (pij )i∈I,j∈Jest appelée loi jointe du couple (X, Y )et on a :
0≤pij ≤1
Pi∈I,j∈Jpij = 1
Exemple 1. On tire deux chiffres au hasard, indépendamment et de façon équiprobable entre 1 et 3. On
note Xle maximum des chiffres obtenus et Yla somme des chiffres obtenus. On peut représenter la loi jointe
dans un tableau :
Y= 2 Y= 3 Y= 4 Y= 5 Y= 6
X= 1 1/9 0 0 0 0
X= 2 0 2/9 1/9 0 0
X= 3 0 0 2/9 1/9 1/9
Tab. 1.1 – Loi de (X, Y ).
Définition 1.1 (Lois marginales)
Soit (X, Y )un couple aléatoire. Les variables Xet Ysont appelées variables marginales. La loi de Xest
appelée loi marginale. Elle entièrement déterminée par les probabilités pi•de tomber sur les points xi:
pi•=P(X=xi) = X
j∈J
P(X=xi, Y =yj) = X
j∈J
pij .
1

2 Chapitre 1. Espérance conditionnelle
De même la loi marginale de Yest déterminée par :
p•j=P(Y=yj) = X
i∈I
P(X=xi, Y =yj) = X
i∈I
pij .
Exemple 1. Pour l’exemple précédent, il suffit de sommer sur les lignes (resp. sur les colonnes) pour obtenir
la loi marginale de X(resp. de Y) :
Y= 2 Y= 3 Y= 4 Y= 5 Y= 6
X= 1 1/9 0 0 0 0 p1•= 1/9
X= 2 0 2/9 1/9 0 0 p2•= 3/9
X= 3 0 0 2/9 2/9 1/9 p3•= 5/9
p•1= 1/9p•2= 2/9p•3= 3/9p•4= 2/9p•5= 1/9
Tab. 1.2 – Lois jointe et marginales.
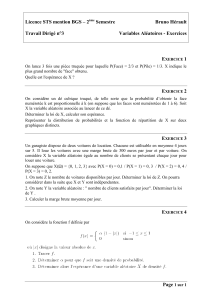
On peut aussi représenter la situation dans la figure 1.1, représentation spaciale dont on s’inspirera pour
interpréter le cas continu.
1
2
2
3
3 5 64
1
9
2
9
3
9
4
9
5
9
X
Y
Fig. 1.1 – Loi jointe (en traits pleins) et lois marginales (en pointillés).
Remarque
En général, la connaissance des lois marginales ne suffit pas reconstituer la loi jointe.
Probabilités et conditionnement - MASS 3 Nicolas JEGOU - Rennes 2

1.1. Cas discret 3
Exemple 2. En guise d’illustration, considérons une urne contenant deux boules blanches et une boule
noire. On tire deux boules de cette urne.
1er cas : tirage avec remise
On note, pour i= 1,2:Xi= 1 si la ieme boule est blanche et Xi= 0 si la ieme boule est noire. Les lois
marginales et jointe sont données dans le tableau suivant :
X1= 1 X1= 0
X2= 1 4/9 2/9 2/3
X2= 0 2/6 1/9 1/3
2/3 1/3
2nd cas : tirage sans remise
Cette fois, on note, pour i= 1,2:Yi= 1 si la ieme boule est blanche et Yi= 0 si la ieme boule est noire. Le
tableau est alors :
Y1= 1 Y1= 0
Y2= 1 2/6 2/6 2/3
Y2= 0 2/6 0 1/3
2/3 1/3
On constate que les lois marginales sont les mêmes alors que ce n’est pas le cas des lois jointes.
Nous pouvons obtenir facilement la loi jointe à partir des lois marginales dans un cas particulier : celui de
l’indépendance des deux variables.
Définition 1.2 (Indépendance)
Les variables aléatoires Xet Ysont dites indépendantes lorsque :
∀(i, j)∈I×JP(X=xi, Y =yj) = P(X=xi)P(Y=yj),
soit avec nos notations : pij =pi•p•j.
Exemple 2. Les variables X1et X2définies dans l’expérience précédente sont indépendantes mais ce n’est
pas le cas des variables Y1et Y2.
Définition 1.3 (Probabilités conditionnelles)
Soit xi∈, la loi conditionnelle de Ysachant X=xiest la loi discrète prenant les valeurs yjavec les
probabilités :
pj|i=P(Y=yj|X=xi) = P(X=xi, Y =yj)
P(X=xi)=pij
pi•
.
Remarques
– La définition suppose que P(X=xi)6= 0 ce qui est le cas sinon xin’a rien à faire dans .
– La suite pj|ij∈Jdéfinit bien une probabilité car :
∀j∈J0≤pj|i≤1et X
j∈J
pj|i=X
j∈J
P(X=xi, Y =yj)
P(X=xi)= 1.
Nicolas JEGOU - Rennes 2 Probabilités et conditionnement - MASS 3
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%