"Systèmes linéaires" 2

TS IRIS ( Physique Appliquée ) Christian BISSIERES http://cbissprof.free.fr Page 1 sur 9 Thème VII-2 : Outil d'étude de Systèmes
Ve
Vs
0
1
2
3
4
5
0 0,0001 0,0002 0,0003 0,0004 0,0005
t (s)
Tension
en Volt
Cours Thème VII
"Systèmes linéaires"
2- Outil d'étude d'un système
analogique linéaire
OBJECTIFS
- Utiliser un nouvel outil pour résoudre une équation différentielle relative à un système.
- Etudier un système électrique directement sans passer par l'équation différentielle.
- Utiliser des théorèmes pour évaluer la valeur initiale et la valeur finale de la sortie d'un
système.
- Représenter un système à l'aide de "schémas bloc" dans le formalisme de Laplace.
I- POURQUOI UTILISER UN NOUVEL OUTIL ?
(Etude d'un exemple)
1- Filtre "RC série" avec entrée échelon (Méthode classique)
Pour le circuit ci-contre, on se propose de prévoir
la forme du signal de sortie vs lorsque l'entrée ve est
un échelon d'amplitude E.
On va naturellement utiliser la méthode du chapitre
précédent :
c Equation différentielle : es
vERiv
=
=+ avec s
dv
iC
dt
= ⇒ s
s
dv
RC v E
dt
+
=.
d Solution de l'équation :
tt
RC
s
v(t) A B.e E1 e
−−
τ
=+ = −
avec τ = RC = 0,1ms.
Remarque : Dans ce cas, l'équation différentielle se résout facilement car le second
membre E est de type "constant" (échelon de tension).
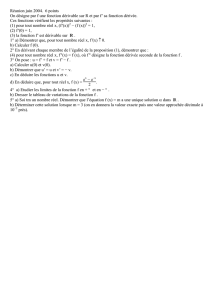
2- Filtre "RC série" avec entrée de type "rampe" (Méthode classique)
Reprenons le même circuit mais avec une entrée de type "rampe" ve(t) = a.t = 1.104 t .
Essayons de prévoir la forme de vs en résolvant l'équation différentielle (méthode du
chapitre précédent) :
c Equation différentielle : s
s
dv
RC v a.t
dt
+
=.
d Solution de l'équation : Trop compliqué car le second membre n'est pas "constant".
Pour évaluer le signal vs(t) on va utiliser un nouvel outil dont le principe est de
transformer l'équation différentielle en un polynôme.
2- Filtre "RC série" avec entrée de type "rampe" (Nouvelle méthode)
L'équation différentielle comporte une constante (τ = RC) et des fonctions (signaux) qui
dépendent du temps ( vs(t) ; s
dv (t)
dt et a.t ).
Nous allons transformer toutes le fonctions du temps en fonctions d'un variable appelée
"p":
v
s(t) deviendra VS(p) Notation des fonction de "p" en majuscule
s
dv (t)
dt deviendra p.VS(p) Multiplication par "p" pour la dérivée
a.t deviendra 2
a
p
2
a
pest trouvé dans le tableau des transformées (voir
page suivante).
c L'équation devient : SS 2
a
.pV(p) V(p)
p
τ+=
d Exprimons VS(p) :
()
S2
a
V(p)1 p
p
+τ = ⇒ S2
a
V(p)
p
(1 p)
=
+
τ
e Exprimons vs(t) : Le tableau des transformées (page suivante) nous indique que
2
a
p
(1 p)
+
τ correspond à
t
s
t
v(t) a. e 1
−τ
=
τ+−
τ
.
Le graphe ci-contre montre les
variations de ve(t) et vs(t) :
R=1kΩ
ve
i vs
C=100nF

TS IRIS ( Physique Appliquée ) Christian BISSIERES http://cbissprof.free.fr Page 2 sur 9 Thème VII-2 : Outil d'étude de Systèmes
0
1
t
Γ(t)
0
t
δ(t)
a
1
0
t
a.t
100%
37%
τ
0
t
f(t)
63%
τ
100%
0
t
f(t)
1
0
t
f(t)
0
t
f(t)
1
1
0
t
f(t) τ
II- LA TRANSFORMATION DE LAPLACE
1- Définition (Pour information)
A toute fonction réelle du temps f(t), on associe une fonction F(p) de la
variable complexe
p = σ + jω par la transformation :
L [ f(t) ] = F (P) =
p
t
0f(t)e dt
+∞ −
∫
2- Propriétés (A connaître et à savoir utiliser)
Linéarité
L [ α f1(t) + β f2(t) ] = α F1(p) + β F2(p)
Dérivation
L [ f ‘] = p F(p) + f (0+) (On aura très souvent : f(0+)=0)
Intégration
Lt
0
F(p)
f(t)dt
p
=
∫
Théorème de la valeur finale
tp0
lim f (t) lim pF(p)
→∞ →
=
Théorème de la valeur initiale
p
t0
lim f (t) f (0 ) lim pF(p)
+
+
→+∞
→==
Théorème du retard (Utilisé pour le filtrage numérique avec z = epTe)
L [ f (t-τ) ] = e-τp F(p)
3- Tableau des transformées
Graphe de f(t) f(t) F(p)
Impulsion unitaire δ(t) 1
Echelon unité Γ(t) 1
p
Rampe a.t 2
a
p
t
1e
−
τ
−
()
1
p
1p+τ
t
e
−
τ
1
1
p
+
τ
ou 1p
τ
+τ
1
1
1
0
20
2
−−−+
−
e
m
mt
mt
ω
ωϕsin
Avec
2
1m
tan
m
−
ϕ= −
2
00
1
pp
p1 2m
++
ωω
avec m < 1
mt 2
00
esin1mt
0
2
1m
ω
−ω ω−
−
2
00
1
pp
12m
++
ωω
avec m < 1
tt
e1
−τ
τ
+−
τ
()
2
1
p
1p+τ

TS IRIS ( Physique Appliquée ) Christian BISSIERES http://cbissprof.free.fr Page 3 sur 9 Thème VII-2 : Outil d'étude de Systèmes
III- TRANSMITTANCE ISOMORPHE
1- Introduction
Considérons le système linéaire ci-dessous (entrée e(t) et sortie s(t)) :
L'équation différentielle linéaire régissant le système est :
n2 n2
n210n210
n2 n2
ds ds ds de de de
b
... b b b s a ... a a a e
dt dt
dt dt dt dt
++ + + = ++ + +
Effectuons une transformée de Laplace de cette équation :
n2 n 2
n210n 210
b p S(p) ... b p S(p) b pS(p) b S(p) a p E(p) ... a p E(p) a pE(p) a E(p)++ + + = ++ + +
⇒
()()
n2 n2
n210 n210
S(p) b p ... b p b p b E(p) a p ... a p a p a++ + + = ++ + +
⇒
n2
n210
n2
n210
ap ... ap ap a
S(p) E(p)
b
p...bpbpb
++ + +
=++ + +
On peut donc exprimer la sortie S(p) en fonction de l'entrée E(p) et du rapport
n2
n210
n2
n210
ap ... ap ap a
b
p ... b p b p b
++ + +
++ + + qui ne dépend que du système.
2- Définition
Pour un système linéaire d'entrée E(p) et de sortie S(p), le rapport S(p)
T(p) E(p)
= est appelé
transmittance isomorphe du système.
La transmittance T(p) caractérise complètement le système qui pourra être schématisé
ainsi :
Remarque : La sortie du système s'évalue avec l'expression S(p) T(p)E(p)
=
.
3- Système du 1°ordre
Un système linéaire du 1°ordre d'entrée e(t) et de sortie s(t) est régit par l'équation
différentielle : 0
ds(t) s(t) T e(t)
dt
τ+= avec τ constante de temps et 0
S
TE
∞
∞
=lorsque e(t) est
un échelon.
La transformation de Laplace donne :
0
p
S(p) S(p) T E(p)
τ
+=
⇒
[
]
0
S(p) 1 p T E(p)+τ =
⇒ 0
T
S(p)
E(p) 1 p
=
+
τ
Définition : La transmittance d'un système linéaire du 1°ordre est du type
0
T
S(p)
T(p) E(p) 1 p
==
+
τ
τ est la constante de temps ( s(τ) = 63% de S∞ )
T0 est la transmittance statique ( 0
S
TE
∞
∞
=lorsque e(t) est un échelon)
Remarque : Utilisons le théorème de la valeur finale pour montrer que S∞ = T0 E∞.
0
tp0p0 p0
TE
lim s(t) lim pS(p) lim pT(p)E(p) lim p 1pp
→∞ → → →
== =
+τ
soit 0
t
lim s(t) S T E
∞
∞
→∞
=
= avec E∞ = E (échelon d'amplitude E).
Système
e(t) s(t)
T(p)
E(p) S(p)
0
T
1p
+
τ
E(p) S(p)

TS IRIS ( Physique Appliquée ) Christian BISSIERES http://cbissprof.free.fr Page 4 sur 9 Thème VII-2 : Outil d'étude de Systèmes
4- Système du 2°ordre
Un système du 2°ordre d'entrée e(t) et de sortie s(t) sera régit par l'équation différentielle
du 2°ordre à coefficients constants :
2
0
22 0
0
1 d s(t) 1 ds(t)
2m s(t) T e(t)
dt
dt ++=
ω
ω
Avec ω0 pulsation propre, m coefficient d'amortissement et 0
S
TE
∞
∞
=lorsque e(t) est un
échelon.
La transformation de Laplace donne :
2
0
20
0
11
p
S(p) 2m pS(p) S(p) T E(p)++=
ω
ω
⇒ 2
0
20
0
12m
S(p) p p 1 T E(p)
++=
ω
ω
⇒ 0
2
2
00
T
S(p)
2m 1
E(p) 1pp
=
++
ωω
.
Définition : La transmittance d'un système linéaire du 2°ordre est du type
0
2
2
00
T
S(p)
T(p) 2m 1
E(p) 1pp
==
++
ωω
ω0 est la pulsation propre.
m est le coefficient d'amortissement (m > 0 pour un système stable).
T0 est la transmittance statique ( 0
S
TE
∞
∞
=lorsque e(t) est un échelon)
IV- EXEMPLES D'ÉTUDE DE SYSTÈMES
1- Système mécanique du 1° ordre
Considérons le système linéaire constitué d'un parachute avec son chargement. L'entrée du
système est la force de pesanteur P = m.g exercée par le chargement de masse m. La
sortie du système est la vitesse de chute v du parachute. Le parachute s'ouvre à l'instant t =
0 du largage (v = 0m/s pour t ≤ 0).
Mise en équation du système :
Force de pesanteur : P = mg (échelon de force : P = 0 pour t ≤ 0)
Force de frottement : F = -fv ( f = coefficient de frottement)
2
2
dv d z
Forces ma m m
dt dt
== =
∑
⇒ dv
Pfv m
dt
−=
⇒ dv
fv m P
dt
+
=
⇒ mdv 1
vP
fdt f
+=
Transformation de Laplace :
m1
V(p) pV(p) P(p)
ff
+=
⇒ V(p) 1/ f
T(p) m
P(p) 1p
f
==
+
⇒ 0
T
T(p) 1p
=
+
τ avec 0
1
Tf
=
et m
f
τ= .
Expression de la vitesse v(t) pour P(t) échelon d'amplitude P :
()
00
TTP
P
V(p) T(p)P(p) 1ppp1p
===
+
τ+τ
⇒
()
t/
0
v(t) T P 1 exp
−
τ
=−
0
2
2
00
T
2m 1
1pp++
ωω
E(p) S(p)
m
0
z
P
F

TS IRIS ( Physique Appliquée ) Christian BISSIERES http://cbissprof.free.fr Page 5 sur 9 Thème VII-2 : Outil d'étude de Systèmes
5,00 100%
3,16
4,75
0,50
τ
63%
3
τ
1,50
95%
t(s)
v
(m/s)
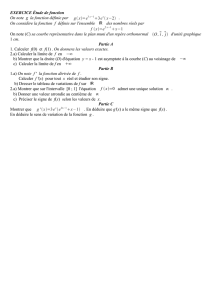
Expression numérique de v(t) pour m = 80kg et f = 160N.m-1.s :
t
t
0,5
80/160
1
v(t) 80 10 1 exp 5 1 exp
160
−
−
=×××− =−
Graphe v(t) :
2- Système électrique du 1° ordre
Considérons le système électrique constitué d'un condensateur C qui doit être chargé à
travers une résistance R. Le condensateur a un défaut de fuite (résistance Rf en parallèle).
L'entrée du système est la tension ve qui sera
un échelon d'amplitude E.
La sortie du système est la tension vs aux
bornes du condensateur.
Mise en équation du système :
es
vRiv=+
⇒
()
eCfs
vRii v=++
⇒ s
ess
f
dv 1
vRC v v
dt R
=++
⇒ s
ess
f
dv R
vRC vv
dt R
=++
⇒ sf
es
f
dv RR
vRC v
dt R
+
=+
⇒ s
ff
se
ff
dv
R.R R
Cv v
RR dt RR
+=
++
⇒ sf
se
f
dv R
vv
dt R R
+τ = + avec f
f
R.R
RR
τ= +.
Transformation de Laplace :
f
ss e
f
R
V (p) pV (p) V (p)
RR
+τ = + ⇒
()
f
se
f
R
V (p) 1 p V (p)
RR
+τ = +
⇒
()
f
f
s
e
R
RR
V(p)
T(p) V(p) 1 p
+
==
+
τ
Expression de la tension vs(t) pour ve(t) échelon d'amplitude E :
()
f
f
se
R
RR
E
V (p) T(p)V (p)
p
1p+
==
+
τ
⇒
()
t/
f
s
f
R
v(t) E 1 exp
RR
−
τ
=−
+ avec f
f
R.R C
RR
τ= +.
Expression numérique de vs(t) pour C = 220µF ; Rf = 12kΩ ; R = 2kΩ et E = 10V :
()
t/
s
12
v (t) 10 1 exp
312
−
τ
=−
+ avec 6
312 220.10 528 s
312
−
×
τ
=× =
µ
+
⇒ 6
t
528.10
s
v(t) 81 exp −
−
=−
.
R
C
ve vs
Rf
i
iC
if
8,00 S∞
5,06
7,60
528
τ
63%
3
τ
1584
95%
10
V
E (V)
t(µs)
vs
(V)
 6
7
8
9
6
7
8
9
1
/
9
100%