Oscillations forcées : Résonance d'élongation et de vitesse

Oscillations forc´ees - R´esonnance d’´elongation
et de vitesse
MPSI
26 aoˆut 2008

Table des mati`eres
1 Pendule horizontale soumis `a une excitation sinuso
¨
ıdale 2
1.1 ´
Equation diff´erentielle du mouvement . . . . . . . . . . . . . . 2
1.2 R´egime forc´e ou r´egime permanent . . . . . . . . . . . . . . . 3
2 R´esonance en ´elongation 4
2.1 Notation complexe . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Amplitude complexe de l’oscillateur . . . . . . . . . . . . . . . 4
2.3 R´esonance d’´elongation . . . . . . . . . . . . . . . . . . . . . . 5
3 Vitesse 6
3.1 Amplitude complexe de la vitesse . . . . . . . . . . . . . . . . 6
4 Impedence complexe 8
4.1 Forceexplicite........................... 8
4.2 Analogie ´electro-m´ecanique . . . . . . . . . . . . . . . . . . . . 8
1

Chapitre 1
Pendule horizontale soumis `a une
excitation sinuso¨
ıdale
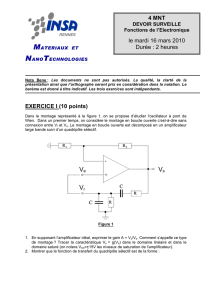
Consid´erons un mobile M(m) de masse m, observ´e dans le r´ef´erentiel
terrestre R galil´een. M est soumis `a :
→Son poid −→
p
→La r´eaction normale au support −→
n
→Une force de frottement fluide : −→
f=−α−→
v(M)R
→L’action du ressort : −→
T=−k∆l
L’excitateur est fix´e au ressort. Le point de fixation peut se d´eplacer par
rapport `a sa position centrale O1.
Soit OE1(t) = xe(t)−→
il’´ecartement du point de fixation par rapport `a sa
position centrale.
L’excitateur impose une excitation de type sinuso¨
ıdale :
xe(t) = XE.cos(ωt)
En l’absence d’excitation, quand M est au repos, la position de M est rep`er´e
par le point O.
On appelera x(t) l’ecartement de M par rapport `a O :
−−−−→
OM(t) = x(t).−→
i
1.1 ´
Equation diff´erentielle du mouvement
En appliquant le P.F.D `a M(m) dans R galil´een, on obtient :
˚x˚+ α
m˚x+x(t)k
m=xe(t)k
m
2

En posant :
→ω0=rk
m
→α
m=ω0
Q
On obtient :
˚x˚+ ω0
Q˚x+ω2
0x(t) = ω2
0XEcos(ωt)
1.2 R´egime forc´e ou r´egime permanent
D´efinition 1 On consid`ere que le syst`eme fonctionne en r´egime permanent
quand x(t)est `a peu pr`es ´egale `a la solution particuli`ere de l’´equation diff´e-
rentielle, `a savoir quand :
x(t)'Xcos(ωt +ϕ)
On appele X l’amplitude de l’´elongation de l’oscillateur et ϕle d´ephasage
entre l’oscilatteur et l’excitateur.
3

Chapitre 2
R´esonance en ´elongation
2.1 Notation complexe
Pour ´etudier le syst`eme, nous allons d´efinir les notations complexes :
xe(t) = XEcos(ωt)↔xe(t) = XEeiωt
x(t) = Xcos(ωt +ϕ)↔x(t) = Xeiωt
avec X=Xeiϕ l’amplitude complexe de l’oscillateur
2.2 Amplitude complexe de l’oscillateur
En injectant dans l’´equation diff´erentielle, sachant que si par exemple, A
est un complexe, on obtient :
d
dt(A) = iωA
On obtient donc :
X(u) = XE
1−u2+iu
Q
avec u, pulsation r´eduite :
u=ω
ω0
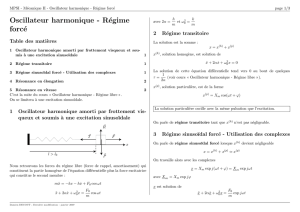
On peut donc d´eterminer le module de l’amplitude de l’oscillateur et la phase
ϕ:
X(u) = XE
s(1 −u2)2+u2
Q2
4
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%