Séquence 03 : Systèmes d`équations linéaires

Séquence 03 : Systèmes
1. Système de deux équations à deux inconnues
a) Equation linéaire
Définition : une équation linéaire à deux inconnues x et y est une équation de la forme rx + sy = c
où r, s et c
sont des nombres réels.
b) Système
Définition : Un système d'équations linéaires à deux inconnues est de la forme :
Résoudre un tel système, c'est chercher tous les couples (x ; y) qui vérifient à la fois les deux équations.
Remarque : Si le couple (xO ; yO) vérifie à la fois les deux équations, on dit que le couple (xO ; yO) est une solution
de ce système.
c) Interprétation graphique
En exprimant y en fonction de x dans les deux équations, nous obtenons des équations de droites du type
y = ax + b. On considère et
Les droites et
aux coefficients r et s)
Les droites et strictement
parallèles.
proportionnels aux coefficients r et s
Les droites et
proportionnels aux coefficients r et s
Le système a un couple de solution
(xO ; yO) qui sont les coordonnées
et
Les deux équations sont
solution.
Les deux équations sont
équivalentes. Le système a une
infinité de couples solutions : ce sont
les coordonnées des points de la
droite .
2.
a) Méthode graphique
Cette méthode est à utiliser dans le cas résolution graphique du système. Elle pourra amener
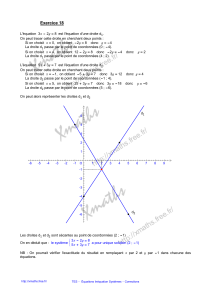
Exemple : Résoudre graphiquement le système :
les droites et :
: -2x + y = 4 soit y = 2x + 4
: x + y = 1 soit y = -x + 1
( et -2 et 1 ne sont pas proportionnels à 1 et 1 donc une unique solution)
I(-1 ; 2)
O
yO
xO
O
O

b) Méthode par substitution
Cette méthode une des équations est simple c'est-à-
inconnues à un coefficient 1. Elle consiste à :
exprimer ;
remplacer dans la deuxième équation cette inconnue ;
r ;
remplacer par le résultat obtenu dans la première équation pour déterminer la deuxième inconnue.
Exemple : Résoudre le système par substitution :
- Dans la 2ème équation on exprime y en fonction de x : y = 1 + 3x.
- ère), on remplace (substitue) y par 1 + 3x :
Ainsi
- On détermine x dans la 1ère équation (en développant), on obtient donc :
- On remplace x par sa valeur dans l’autre équation pour trouver y :
Le système admet donc pour unique solution le couple
S =
c) Méthode par combinaison linéaire
Cette méthode consiste à :
multiplier tous les t, éventuellement procéder de
même avec la deuxième équation de façon à obtenir des coefficients opposés devant une des deux
inconnues ;
effectuer une addition membre à membre et obtenir ainsi une équation à une inconnue ;
résoudre cette équation ;
pO
revenir à la méthode de substitution.)
Exemple : Résoudre le système par combinaison linéaire :
- On cherche une combinaison des lignes
inconnues :
Choisissons élimer y en multipliant par 2 :
Ainsi :
- On additionne les deux lignes membre à membre et on obtient
- On recommence pour éliminer x en multipliant par 5 et par -3 :
Ainsi :
On additionne les deux lignes membre à membre et on obtient
Le système admet donc pour unique solution le couple
S =
.
.
1
/
2
100%