II. Modélisation et paramètres

S
S
SO
O
OU
U
US
S
S-
-
-P
P
PR
R
RO
O
OJ
J
JE
E
ET
T
T
2
2
20
0
04
4
4
Dimensionnement en puissance
Département de Génie Mécanique 2006
Description rapide :
Proposer un profil d’accélération en charge et à vide du
convoyeur
Tracer les profils d’accélération, de vitesse, de couple, de
puissance et de déplacement
Déterminer les paramètres relatifs au choix de la
motorisation

I. Introduction
Le but de ce document est de commenter les fichiers Excel suivants : « Etude partie
puissance en charge.xls » et « Etude partie puissance à vide.xls ».
II. Modélisation et paramètres
A. Données techniques
Dans cette partie de cette feuille sont regroupées les données techniques relatives à
l’installation existante et aux paramètres liés à la bobine à transporter. Ces paramètres ne
doivent pas être modifiés.
B. Paramètres conception
Voici le détail des différents paramètres choisis :
Coefficient de frottement rail/roue : il a été intuité à 0.1 ce qui représente une
faible valeur comparée aux coefficients de frottement généralement constatés
entre ces deux entités. Le modèle de frottement choisi est le modèle de
Coulomb.
Rayon roue motrice : il a été choisi en fonction des valeurs usuelles
rencontrées dans ce type d’industrie : soit 100mm.
Réduction transmission : si jamais une réduction est utilisée entre les roues et
le moteur, ce paramètre permettra d’en tenir compte pour remonter jusqu’aux
données relatives à la motorisation.
Couple moteur : Suivant les catalogues, on peut indiquer ici la valeur du couple
moteur afin de vérifier les performances du système.
Couple résistant : représente le couple résistant au roulement global du
système. Il est fixé ici à 10% du couple moteur par simple commodité.
Couple frein : idem couple moteur mais pour le freinage.
Rendement : si un réducteur est utilisé, cela permet de prendre en compte le
rendement mécanique.
C. Paramètres spatiaux
La position du centre de gravité de la bobine sur le convoyeur est représentée par les
paramètres visibles dans cette partie de la feuille. Nous ne considérons que trois points
d’appuis afin de résoudre littéralement les équations d’équilibre dynamique.

III. Calculs statique – dynamique
Le but de cette feuille est de calculer les réactions aux appuis et de calculer les
accélérations au démarrage et au freinage.
A. Statique du robot
Avec le paramétrage disponible dans la feuille précédente, on obtient les équations
suivantes :
2 1 2 1 2 2
2 1 2 2 1 2
2
1
12
21
9.81 ( ) ( ) 9.81
( ) ( ) ( ) ( )
9.81
9.81
GA tot GA GA GA GA GA tot
PGP GA GA GA GA GP GA GA
GA tot P GP
AGA GA
A tot P A
y M x x y y x M
Zx x y y y y x x
y M Z y
Zyy
Z M Z Z
On obtient ainsi les valeurs des réactions aux appuis en statique.
Le couple maximal transmissible vérifie la relation suivante :
max roue
roue
TC
f T N f N f C N f r
Nr
B. Dynamique du robot
On calcule l’accélération maximale que subit le convoyeur en fonction du couple
transmis, du rapport de réduction (entre le moteur et la seule roue motrice) et la masse totale
de l’engin :
1/2
ext tot tot tot roue
C
F M a T M a a M r n
Le temps écoulé pour arriver à la vitesse Vmax demandée se calcule à l’aide d’une
intégration :
max
0
VdV
dV a dt t a
. Il est donc nécessaire de connaître la vitesse pour tout
t. Ceci sera explicité plus bas ; en effet, nous émettrons une hypothèse quant au profil de
vitesse que l’on pourra probablement observer une fois que le convoyeur sera en situation.
Enfin, la distance parcourue fait également appel à une intégration :
max
0()
t
parcouru
D V t dt
. Pour les mêmes raisons que pour le temps écoulé, cette intégration
numérique sera explicité dans une partie ultérieure du rapport.

IV. Profil de vitesse choisit
Afin d’effectuer une bonne simulation, il est nécessaire de se construire un profil de
vitesse réaliste. Transportant des charges lourdes, l’asservissement sera en effet peu
performant : pas de dépassement, pas d’oscillation autour de la vitesse voulue notamment. Le
profil devra donc satisfaire les exigences suivantes :
pente nulle au départ : en effet, le profil d’accélération n’a pas de discontinuité
(dans le cas contraire, cela serait peu fidèle à la réalité : les discontinuités
n’existant pas dans notre environnement macroscopique)
pente nulle à V=Vmax
pas de dépassement de la vitesse : les à coups sont à proscrire lors du transport
de lourdes charges (caractère dangereux, usure précoce des organes
mécaniques)
pente maximale n’excédant pas l’accélération maximale calculée : dans le cas
contraire il y aurait glissement.
On pose donc une fonction
( ) ( )v t f t
répondant à tous ces critères. La fonction
polynôme est la plus simple à mettre en oeuvre ; elle doit satisfaire les exigences suivantes :
max
0
max
'
(0) 0
()
0
0
T
T
f
f T V
df
dt
df
dt
df a
dt
On trouve la solution suivante :
max 3
0.5
3
2
: trouvé à l'aide du solveur
V
aT
b a T
T
Un polynôme du troisième degré convient, en effet :
32
32
32
32
max
()
(0) 0
( ) 0
(0) 0
( ) 3 2 0
( ') 3 ' 2 '
f t a x b x c x d
fd
f T a T b T c T
fc
f T a T b T
f T a T b T a
Les inconnues sont : a, b et T (on fixe T’=T/2) : le
système possède donc une solution unique.

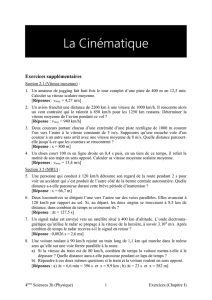
On effectue le même travail pour la décélération et on obtient le profil complet suivant :
Vitesse d'avance m/s
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0 0,5 1 1,5 2 2,5 3 3,5 4
Temps (s)
Vitesse avance (m/s)
A partir de cela on peut donc effectuer les deux intégrations numériques nous
permettant de calculer le temps nécessaire à l’accélération, la décélération puis la distance
parcourue avant d’avoir atteint la Vmax ou l’arrêt complet.
 6
7
6
7
1
/
7
100%