OCMI vxy θ - Lycée Jean Perrin

Lycée Jean Perrin - Classe de TSI 1 E. VAN BRACKEL TD de Physique-Chimie
TD
13 M1 - Notions de cinématique
I Vitesse d’une voiture
1. Calculer l’accélération nécessaire, supposée constante, pour qu’une voiture initiale-
ment à une vitesse v = 50 km.h−1puisse s’arrêter en une distance inférieure à 15 m.
Comparer à l’accélération de la pesanteur.
2. Afin de contrôler la vitesse des voitures, limitée sur une portion à 110 km.h−1, l’ins-
tallation d’un radar n’est pas toujours efficace, on emploie alors deux radars placés à
une certaine distance d, valant ici 2 km. Comment faire pour être sûr qu’un conduc-
teur n’a pas effectué d’excès de vitesse tout en n’étant pas flashé ?
3. Deux voitures se suivent, roulant à v0= 90 km.h−1, à une distance d’environ
180 m : l’une d’elle ralentit alors brusquement avec une décélération constante
a1=−2.0 m.s−2. Celle la suivant commence à freiner deux secondes plus tard, avec
une décélération constante plus faible a2=−1.0 m.s−2.
(a) En prenant pour origine du repère spatial la position de la seconde voiture à
l’instant où la première commence à freiner, établir les équations horaires du
mouvement des deux véhicules.
(b) Si cette décélération dure un temps δt, quelle est la condition sur ce temps pour
qu’il n’y ait pas pas de choc ?
II Vitesses, accéléra-
tions,...
1. Une balle est lancée vers le haut. Au
point le plus haut de la trajectoire,
comment sont dirigés les vecteurs vi-
tesse et accélération ?
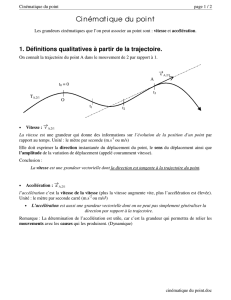
2. Une voiture suit la trajectoire représentée ci-contre, avec un vecteur vitesse de norme
constante.
(a) Le vecteur vitesse est-il constant ?
(b) Représenter en quelques points de la trajectoire l’accélération, en essayant de
prendre en compte le changement de courbure.
III Mouvement circulaire
On considère une bille attachée à une ficelle lui permettant de se déplacer en rotation
uniforme autour d’un axe fixe à une distance R. On note ωsa pulsation.
1. Donner l’expression de la vitesse de cette bille en coordonnées cylindriques.
2. En déduire les coordonnées cartésiennes associées.
3. Montrer à l’aide des coordonnées cartésiennes que la trajectoire est un cercle.
4. Calculer l’accélération en coordonnées cylindriques et montrer qu’elle est proportion-
nelle au vecteur position −→
R.
IV Sortie d’autoroute
Considérons le cas, fréquent, où l’on souhaite emprunter une sortie d’une autoroute limitée
à 130 km/h, que l’on assimilera à un arc de cercle de rayon R = 50 m. Pour éviter de dé-
raper dans la bretelle, on considère qu’il faut que la norme de l’accélération soit inférieure
à10 m.s−2.
1. Montrer que prendre la sortie à la vitesse limite est bien trop dangereux.
2. Expliquer pourquoi il ne faut pas freiner dans le virage au risque, encore, de quitter
la route. On montrera pour cela que l’accélération s’exprime en fonction de la vitesse
et sa dérivée comme a = s(vω)2+dv
dt 2
3. Quelle est la vitesse maximale à laquelle la voiture peut décrire le virage ?
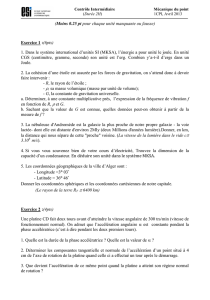
V Vélo
Cherchons la trajectoire d’un point, noté M par la suite,
sur le périmètre d’une roue de vélo de centre C et de
rayon r. Initialement M coïncide avec O, l’origine du
repère. Ensuite, au cours du mouvement, on appelle
θ(t) l’angle entre −−→
CM et la verticale descendante. La
roue roule asns glisse sur le sol de telle manière que
l’abscisse xIdu point de contact I de la roue avec le
sol soit égale à l’arc de cercle IM. Enfin, la vitesse du
centre de la roue vaut −→
vC= v0−→
exoù v0>0.
O
C
M
I
v0
x
y
θ
1. Donner l’évolution de l’angle θ(t) en fonction du temps.
2. Donner la position cartésienne du point M. On s’aidera éventuellement dans un pre-
mier temps d’une relation vectorielle.
3. A l’aide de la calculatrice ou d’un ordinateur, tracer l’allure de la trajectoire. Cela
s’appelle une cycloïde.
1
1
/
1
100%