Cinématique du solide indéformable

Cinématique du solide indéformable
_____________________________________________________________________________________________________
Lycée Vauban, Brest – classe de PTSI – 1
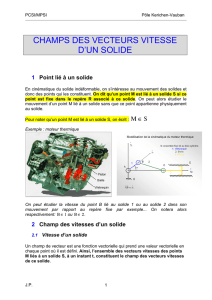
1 – Solide indéformable
1.1 – Relation de base
La distance de deux points quelconques d’un solide indéformable demeure invariable quelque soit le
temps.
L’hypothèse de l’indéformabilité du solide se traduit par :
Soient deux points A et B d’un solide indéformable (S). On a
2constanteAB =
u
uur
Remarquons tout de suite que cette hypothèse ne s’appliquera qu’après une étude de sa compatibilité
avec les conditions réelles en rapport avec ce solide : matériaux, géométrie, surface, actions
mécaniques, type d’étude,… On ne pourra pas, par exemple, faire l’hypothèse de solide indéformable
pour étudier le mouvement d’un pneumatique sur une route accidentée !
1.2 – Repère attaché au solide
La notion de repère est directement déduite de l’hypothèse
du solide indéformable. On peut donc « attacher » un repère
à un solide indéformable en considérant 4 points non
coplanaires liés au solide dont l’un est l’origine du repère et
les trois autres les extrémités des vecteurs de la base du
repère.
1.3 – Position du solide
Pour paramétrer un solide, il faut fixer la position de 3 points
liés au solide, c’est-à-dire 9 paramètres. De plus, les 3 points
ont une distance constante traduite par 3 équations de liaison
des paramètres.
La position d’un solide dépend de 6 paramètres indépendants.
Un choix possible des paramètres par rapport à un repère est par exemple :
– la position du point 1
Odans R ;
– les trois angles d’Euler2.
2 – Repérage du solide indéformable
1 Longueur et disposition des dents de roues engrenant l’une sur l’autre. Quand la dent ONL cesse de
travailler sur la dent PZ, la dent BG doit commencer à travailler sur la dent correspondante de la roue
A. (Philippe de LA HIRE, Traité des épicycloïdes).LA HIRE (1640 – 1718).
2 Définis par la suite.
« Je te donne un bonbon, tu me donnes un
bonbon, nous avons chacun un bonbon.
Je te donne une idée, tu me donnes une idée,
nous avons chacun deux idées. »
Proverbe américain
1
O
x
y
z
O
1
z
1
y
1
x
1
Cinématique du solide
indéformable

Cinématique du solide indéformable
_____________________________________________________________________________________________________
Lycée Vauban, Brest – classe de PTSI – 2
2.1 – Coordonnées cartésiennes
(
)
123
,,
x
xx pour mémoire
2.2 – Coordonnées cylindriques
(
)
3
,,
x
ρθ
33
OM u x e=ρ +
rr
r
en projection sur le repère cartésien
2.3 – Coordonnées sphériques
(
)
,,
ρ
θϕ
OM u=ρ
rr
en projection sur le repère cartésien
1
2
3
cos sin
sin sin
cos
x
x
x
=ρ θ ϕ
⎧
⎪=ρ θ ϕ
⎨
⎪=ρ ϕ
⎩
2.4 – Angles d’Euler
Une base orthonormée se déduit d’une autre base orthonormée par une rotation de l’espace définie
par 3 paramètres. On utilise fréquemment les angles d’Euler dont la définition est donnée ci-après.
Soit
(
)
123
,,
x
xx
r
rr et
(
)
123
,,
y
yy
r
rr deux bases orthonormées de
l’espace vectoriel E3.
Soit u
r
un vecteur appartenant à l’intersection des plans
(
)
12
,
x
x
r
v
et
(
)
12
,
y
y
r
r.
Les trois angles d’Euler permettent de paramétrer une base par
rapport à une autre. Ils sont définis par
(
)
1,
x
uψ=
r
r, angle de précession orienté par 3
x
r,
(
)
33
,
x
yθ=
r
r, angle de nutation orienté par u
r,
(
)
1
,uyϕ=
r
r, angle de rotation propre orienté par 3
y
r.
x1
x2
x3
M
m
θ
O
ρ
u
r
x1
x2
x3
O
M
m
θ
ϕ
ρ
u
r
r
x1
x3
y3y2
y1
u
x2
ψϕ
θ
v
x3
u
w
y3
θ
θ
u
wy3
y1
y2
ϕ
ϕ
x1
x2
x3
u
v
ψ
ψ
()
321 ,, xxx
r
r
r
(
)
3
,, xvu
r
r
r
(
)
3
,, ywu
r
r
r
()
321 ,, yyy
r
r
r
ψ
θ
ϕ

Cinématique du solide indéformable
_____________________________________________________________________________________________________
Lycée Vauban, Brest – classe de PTSI – 3
La base
()
3
,,uvx
rrr est appelée première base intermédiaire ;
La base
()
3
,,uwy
rrr est appelée deuxième base intermédiaire.
La droite dirigée par u
r s’appelle la droite des noeuds. On a 33
33
x
y
u
x
y
∧
=∧
r
r
r
r
r
3.5 – Angles de Cardan ou angles RTL (roulis, tangage et lacet)
On note θ1, θ2 et θ3 les angles de Cardan permettant le passage du
repère R1
()
123
,,
x
xx
rr r au repère R2
()
123
,,yyy
rr r par l'intermédiaire des
deux repères R'' et R'.
Les angles sont définis sur la figure ci-contre.
On a le passage suivant :
()
()
()
()
()
()
(
)
123
,,,rX rY rZ
iiii
x
xxy
θθθ
′′ ′
⎯⎯⎯⎯→⎯⎯⎯⎯→⎯⎯⎯⎯→
rrrr
3 – Dérivation vectorielle
3.1 – Définition
Soit la base orthonormée directe
()
123
,,Bxxx=rr r de l’espace vectoriel E3.
On considère l’application de classe C1 de R dans E3 définie par :
(
)
tvt
r
→
La dérivée du vecteur
(
)
tv
r par rapport à t est le vecteur :
()
B
tv
dt
d⎥
⎦
⎤
⎢
⎣
⎡rtel que
()
(
)
(
)
htvhtv
tv
dt
d
h
B
r
r
r−+
=
⎥
⎦
⎤
⎢
⎣
⎡
→0
lim
3.2 – Formule de la base mobile
C’est la relation FONDAMENTALE de base de la cinématique..
Soit la base orthonormée directe
()
1111
,,Bxyz=rrr de l’espace vectoriel E3.
1x
r
3
x
r
3
y
r2
y
r
1
y
r
2
x
r
θ
2 θ3
θ
1
y
y
′
′′
=
r
r
z′′
r
x′
r
x'
y'
z'=y3
y1
y2
θ3
θ3
x2
x3
x1=x"
y''
z''
θ1
θ1
z"
x''
y"=y'
z'
x'
θ
2
θ2

Cinématique du solide indéformable
_____________________________________________________________________________________________________
Lycée Vauban, Brest – classe de PTSI – 4
Soit la base orthonormée directe
()
2222
,,Bxyz=
r
rr de l’espace vectoriel E3 dépendant du paramètre t
par rapport à la première base.
– Calculons
1
2
B
dx
dt
⎡⎤
⎢⎥
⎣⎦
r
,
1
2
B
dy
dt
⎡⎤
⎢⎥
⎣⎦
r
et
1
2
B
dz
dt
⎡⎤
⎢⎥
⎣⎦
r
()
2222
,,Bxyz=rrr orthonormée impose
2
21x=
r d’où
1
2
20
B
dx
xdt
⎡⎤
⋅=
⎢⎥
⎣⎦
r
r posons alors
1
222
B
dx
y
z
dt
⎡⎤
=
γ+δ
⎢⎥
⎣⎦
r
r
r
2
21y=
r d’où
1
2
20
B
dy
ydt
⎡⎤
⋅=
⎢⎥
⎣⎦
r
r posons alors
1
222
B
dy
x
z
dt
⎡⎤
=
σ+α
⎢⎥
⎣⎦
r
r
r
2
21z=
r d’où
1
2
20
B
dz
zdt
⎡⎤
⋅=
⎢⎥
⎣⎦
r
r posons alors
1
222
B
dz
x
y
dt
⎡⎤
=
ξ+β
⎢⎥
⎣⎦
r
r
r
de plus
220yz⋅=
rr d’où
11
22
22
0
BB
dz dy
yz
dt dt
⎡⎤ ⎡⎤
⋅+⋅ =
⎢⎥ ⎢⎥
⎣⎦ ⎣⎦
rr
rr soit
α
−
=
ξ
220xz⋅=
rr d’où
11
22
22
0
BB
dz dx
xz
dt dt
⎡⎤ ⎡⎤
⋅+⋅=
⎢⎥ ⎢⎥
⎣⎦ ⎣⎦
rr
rr soit
β
−
=
δ
220xy⋅=
rr d’où
11
22
22
0
BB
dy dx
xy
dt dt
⎡⎤ ⎡⎤
⋅+⋅=
⎢⎥ ⎢⎥
⎣⎦ ⎣⎦
rr
rr soit
γ
−
=
σ
ce qui conduit finalement aux trois relations :
1
222 2
B
dx yz x
dt
⎡⎤
=γ −β =ω∧
⎢⎥
⎣⎦
rrr r
r
1
222 2
B
dy yz y
dt
⎡⎤
=α −γ =ω∧
⎢⎥
⎣⎦
rrr r
r
1
222 2
B
dz yz z
dt
⎡⎤
=β −α =ω∧
⎢⎥
⎣⎦
rrr r
r
dans lesquelles on a posé :
()
21 2 2 2
/BB x y zω=ω =α +β +γ
r
rr
rr . C’est le vecteur taux rotation de la base
B2 par rapport à la base B1.
– Calculons
()
2
B
dU t
dt
⎡⎤
⎢⎥
⎢⎥
⎣⎦
r
en fonction de
()
1
B
dU t
dt
⎡⎤
⎢⎥
⎢⎥
⎣⎦
r
Soit
()
kujuiutU 321
rrrr ++=
()
22 22 22
Ut xx yy zz=++
r
r
rr
.
La dérivée de ce vecteur dans la base B2 s’écrit :
(
)
2
B
dttUd
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
r
La dérivée de ce vecteur dans la base B1 s’écrit :
(
)
1
B
dttUd
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
r
On a :
()
2
222
222
B
dU t dx dy dz
x
yz
dt dt dt dt
⎡⎤
=++
⎢⎥
⎢⎥
⎣⎦
r
r
rr

Cinématique du solide indéformable
_____________________________________________________________________________________________________
Lycée Vauban, Brest – classe de PTSI – 5
et
()
111
1
222 2 2 2
2222 2 2
BBB
B
dU t dx dy dz dx dy dz
xyzx y z
dt dt dt dt dt dt dt
⎡⎤
⎡
⎤⎡⎤⎡⎤
=+++ + +
⎢⎥
⎢
⎥⎢⎥⎢⎥
⎣
⎦⎣⎦⎣⎦
⎢⎥
⎣⎦
r
r
rr
rrr
Or, on a
()()
111
222
222 21
/
BBB
dx dy dz
x
yz BBUt
dt dt dt
⎡⎤ ⎡⎤ ⎡⎤
++=ω∧
⎢⎥ ⎢⎥ ⎢⎥
⎣⎦ ⎣⎦ ⎣⎦
rrr
r
r
On en déduit la relation fondamentale de la dérivée d’un vecteur dans deux bases différentes dont
l’une dépendant d’un paramètre par rapport à l’autre.
() () ()()
12
21
/
BB
dU t dU t BB Ut
dt dt
⎡⎤⎡⎤
=+ω∧
⎢⎥⎢⎥
⎢⎥⎢⎥
⎣⎦⎣⎦
rr
r
r
4 – Moments d’un vecteur
Si l’outil mathématique « vecteur » est bien adapté à l’étude mécanique du point, il existe un autre
concept mathématique qui permet une étude rationnel de la mécanique du solide indéformable : il
s’agit du torseur.
4.1 – Moment d’un vecteur par rapport à un point
Soit un vecteur v de l’espace et une droite D dirigée par v. On appelle vecteur glissant le couple
(
)
Dv,
r
.
Soit un point A de D. Le moment du vecteur glissant
(
)
Dv,
r
par rapport
à un point P de l’espace est défini par :
()
vAPvPM
r
r
r
r
∧=,
Remarques :
– ce moment est indépendant du point A de D.
– si H est la projection orthogonale de P sur D, on a facilement la
norme du moment
()
vPM
r
r
,
()
(
)
vHPvAHHPvAPvPM
r
r
r
r
r
r
r
r
r
∧=∧+=∧=,
()
vdvHPvPM
r
r
r
r
r
=∧=,, dans laquelle d est la distance de P à la droite D.
4.2 – Changement de point
Soit un vecteur glissant
(
)
Dv,
r
, un point A de D et deux points M et P de l’espace. Calculons la relation
entre les moments en M et en P. On a
(
)
vAMvMM
r
r
r
r
∧=,
Et
()
vAPvPM
r
r
r
r
∧=,, or, d'après la relation de Chasles, on peut écrire,
v
AM
v
MP
v
AP
r
r
r
r
r
r
∧+∧=∧ , d'où l'on tire
(
)
(
)
vMPvMMvPM
r
r
r
r
r
r
∧+= ,,
A
P
dH
M(P,
v
)
v
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%