d´eveloppements d`alg`ebre pour l`oral de l`agr´egation

S´ebastien Pellerin
D´
EVELOPPEMENTS D’ALG`
EBRE POUR
L’ORAL DE L’AGR´
EGATION

S´ebastien Pellerin
Laboratoire de Math´ematiques - Case Cr A, Facult´e des Sciences et Techniques de Saint-J´erˆome,
Universit´e d’Aix-Marseille 3, 13397 MARSEILLE Cedex 20.
E-mail : [email protected]

D´
EVELOPPEMENTS D’ALG`
EBRE POUR L’ORAL DE
L’AGR´
EGATION
S´ebastien Pellerin


TABLE DES MATI`
ERES
1. Action de Ansur K[T1, . . . , Tn] .............................................................. 7
2. Automorphismes de K(X) .................................................................. 11
3. Automorphismes de SO(3) ................................................................ 13
4. Th´eor`eme de Burnside .................................................................... 15
5. Th´eor`eme de Carlitz ........................................................................ 17
6. Groupe des isom´etries du cube ............................................................ 19
7. D´ecomposition polaire ...................................................................... 21
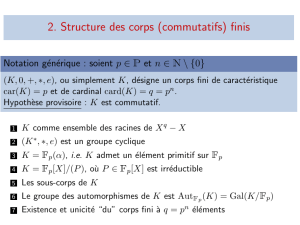
8. Entiers de Gauss et th´eor`eme des deux carr´es .......................................... 23
9. Vecteurs propres de la transformation de Fourier dans L2. . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
10. Forme faible du th´eor`eme de Dirichlet .................................................. 27
11. D´ecomposition de Dunford et applications ............................................ 29
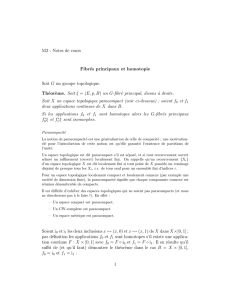
12. Enveloppe convexe du groupe orthogonal .............................................. 33
13. ´
Equations diophantiennes et s´eries g´en´eratrices ...................................... 41
14. Un hom´eomorphisme r´ealis´e par l’exponentielle ...................................... 43
15. Diagonalisabilit´e de l’exponentielle de matrices ........................................ 45
16. Th´eor`eme des extrema li´es .............................................................. 47
17. ´
Equation de Fermat pour n= 2 et n=4 ................................................ 49
18. M´ethode de Gauss et polynˆomes orthogonaux ........................................ 51
19. Action du groupe modulaire sur le demi-plan de Poincar´e .......................... 53
20. Groupes d’ordre pq ........................................................................ 57
21. Irr´eductibilit´e de Φn...................................................................... 59
22. Th´eor`eme de John ........................................................................ 61
23. Th´eor`eme de Jordan ...................................................................... 63
24. Th´eor`eme de stabilit´e de Liapounov .................................................... 67
25. Th´eor`eme de Pascal ...................................................................... 69
26. Polynˆomes irr´eductibles de Fq[T] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
27. Probabilit´es que deux entiers soient premiers entre eux .............................. 75
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
1
/
98
100%