Mécanique
Fondements
et applications
Avec 320 exercices
et problèmes résolus
José-Philippe PÉREZ
Professeur émérite de l’Université Paul-Sabatier de Toulouse
Avec la participation
de Olivier PUJOL
Maître de conférences à l’Université de Lille
7e édition
4
7
2
3
2
7
© Dunod, 2001, 2006, 2014
5 rue Laromiguière, 75005 Paris
www.dunod.com
© Masson, 1984, 1989, 1991, 1995, 1997
ISBN 978-2-10-072189-4
Table des matières
Avant-propos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xii
Les grands noms de la mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xiv
Constantes physiques, notations et symboles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xviii
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xviii
II . — Constantes physiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I . — Constantes fondamentales
xviii
III . — Constantes du système solaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xviii
IV . — Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xx
V . — Alphabet grec . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xxii
VI . — Multiples et sous-multiples en notation scientifique . . . . . . . . . . . . . . . . . . . . . .
xxii
Description de l’ouvrage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xxiii
La mécanique en vingt questions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxvii
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
I . — Espace vectoriel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
II . — Espace affine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
III . — Opérations sur les vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
IV . — Vecteur lié et système de vecteurs liés . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
V . — Champ de vecteurs antisymétrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
VI . — Torseurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
VII . — Analyse dimensionnelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
20
2. Cinématique du point mobile. Vitesse de rotation d’un repère
I . — Cadre spatiotemporel de la cinématique galiléenne . . . . . . . . . . . . . . . . . . . . . .
22
II . — Cinématique du point mobile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
III . — Différents mouvements d’un repère . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
36
3. Changement de référentiel
I . — Relativité du mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
II . — Composition des vitesses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
III . — Composition des accélérations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
49
vi
Table des matières
4. Dynamique du corpuscule
I . — Masse et quantité de mouvement d’un corpuscule . . . . . . . . . . . . . . . . . . . . . . .
53
II . — Loi fondamentale de la dynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
III . — Principe de l’inertie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
59
IV . — Moment cinétique
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
V . — Mouvements rectilignes et mouvements plans . . . . . . . . . . . . . . . . . . . . . . . . .
62
VI . — Troisième loi de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
67
5. Énergétique du corpuscule
I . — Puissance et travail d’une force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
II . — Énergie cinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
III . — Énergie potentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
IV . — Énergie mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
80
6. Gravitation. Propriétés du champ de gravitation
I . — Force de gravitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
II . — Champ et potentiel de gravitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
83
III . — Propriétés du champ de gravitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
IV . — Calculs de champs et de potentiels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
V . — Énergie potentielle gravitationnelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
93
96
7. Référentiels non galiléens. Dynamique terrestre
I . — Référentiels non galiléens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
99
II . — Dynamique terrestre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
III . — Marées océaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
101
106
IV . — La force de Coriolis terrestre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
107
V . — Référentiels accélérés par rapport à la Terre . . . . . . . . . . . . . . . . . . . . . . . . . .
113
VI . — Référentiels inertiels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
116
119
8. Particule chargée dans un champ électromagnétique stationnaire
I . — Force de Lorentz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
123
II . — Particule chargée dans un champ électrique . . . . . . . . . . . . . . . . . . . . . . . . . .
124
III . — Particule chargée dans un champ magnétique . . . . . . . . . . . . . . . . . . . . . . . . .
127
IV . — Champs électrique et magnétique simultanés . . . . . . . . . . . . . . . . . . . . . . . . .
130
V . — Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
132
135
9. Mouvement d’un corpuscule guidé
I . — Corpuscule guidé sur une courbe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
II . — Pendule circulaire
138
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
141
III . — Corpuscule guidé sur une surface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
145
149
vii
Table des matières
10. Oscillateurs harmoniques. Oscillateurs amortis
I . — Oscillateurs harmoniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
152
II . — Oscillateurs amortis par frottement visqueux . . . . . . . . . . . . . . . . . . . . . . . . .
158
III . — Analogie électrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
162
IV . — Oscillateur amorti par frottement solide . . . . . . . . . . . . . . . . . . . . . . . . . . . .
163
V . — Représentation dans l’espace des phases . . . . . . . . . . . . . . . . . . . . . . . . . . .
165
VI . — Oscillateurs paramétriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
166
VII . — Effets de termes non linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
170
174
11. Oscillations forcées. Résonance
I . — Exemples physiques d’oscillations forcées . . . . . . . . . . . . . . . . . . . . . . . . . .
178
II . — Oscillations forcées. Résonance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
181
III . — Excitation maximale indépendante de la pulsation . . . . . . . . . . . . . . . . . . . . . . .
184
IV . — Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
189
193
12. Corps ponctuel soumis à une force centrale conservative
I . — Mouvements à force centrale conservative
. . . . . . . . . . . . . . . . . . . . . . . . . .
197
II . — Problème de Kepler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
199
III . — Lois de Kepler. vitesse d’évasion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
206
IV . — Satellites de la Terre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
208
213
c Dunod – Toute reproduction non autorisée est un délit
13. Système de corps ponctuels en interaction. Problème à deux corps
I . — Éléments cinétiques d’un système de corpuscules . . . . . . . . . . . . . . . . . . . . . . .
217
II . — Problème à deux corps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
221
III . — Dynamique des systèmes de corps ponctuels . . . . . . . . . . . . . . . . . . . . . . . . .
227
IV . — Énergétique des systèmes de N corps ponctuels . . . . . . . . . . . . . . . . . . . . . . .
231
V . — Interaction gravitationnelle à N corps . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
237
239
14. Collision de deux particules
I . — Définition et propriétés des collisions de particules . . . . . . . . . . . . . . . . . . . . . .
245
II . — Collision élastique directe de deux particules . . . . . . . . . . . . . . . . . . . . . . . . .
249
III . — Diffusion élastique par une cible immobile . . . . . . . . . . . . . . . . . . . . . . . . . .
250
IV . — Collisions inélastiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
253
255
15. Diffusion de Rutherford. Notion de section efficace
I . — Diffusion de Rutherford
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
257
II . — Sections efficaces de diffusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
262
III . — Libre parcours moyen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
266
IV . — Application au pouvoir d’arrêt des matériaux . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
268
269
viii
Table des matières
16. Cinématique du solide et des solides en contact
I . — Cinématique du solide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
272
II . — Cinématique des solides en contact . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
277
III . — Mouvements plans d’un solide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
281
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
283
17. Éléments cinétiques des systèmes matériels
I . — Centre de masse d’un système matériel . . . . . . . . . . . . . . . . . . . . . . . . . . . .
286
II . — Moments d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
291
III . — Méthodes de calcul des moments d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . .
296
IV . — Quantité de mouvement et moment cinétique . . . . . . . . . . . . . . . . . . . . . . . . .
298
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
305
18. Dynamique des systèmes matériels
I . — Forces appliquées à un système . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
311
II . — Principe fondamental de la dynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . .
313
III . — Théorèmes généraux de la dynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
314
IV . — Applications des théorèmes généraux . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
318
V . — Lois de conservation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
323
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
326
19. Lois de Coulomb sur le frottement solide
I . — Actions de contact . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
II . — Lois sur le frottement solide
332
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
332
III . — Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
336
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
341
20. Énergétique des systèmes matériels
I . — Travail des forces qui s’exercent sur un système . . . . . . . . . . . . . . . . . . . . . . . .
344
II . — Travail des forces qui s’exercent sur un solide . . . . . . . . . . . . . . . . . . . . . . . . .
347
III . — Travail total des actions de contact entre solides . . . . . . . . . . . . . . . . . . . . . . . .
349
IV . — Théorèmes de l’énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
352
V . — Conservation de l’énergie mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
355
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
359
21. Mécanique des chocs
I . — Dynamique des chocs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
365
II . — Énergétique des chocs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
367
III . — Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
369
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
372
Table des matières
ix
22. Mécanique des systèmes ouverts. Théorèmes d’Euler
I . — Exemples de systèmes ouverts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
375
II . — Caractère conservatif de la masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
378
III . — Théorème de la quantité de mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . .
379
IV . — Théorème du moment cinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
382
V . — Théorème de l’énergie cinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
385
387
23. Statique
I . — Statique des corps ponctuels et des solides . . . . . . . . . . . . . . . . . . . . . . . . . .
389
II . — Statique des fils . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
393
III . — Méthode des travaux virtuels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
396
400
24. Lagrangien et hamiltonien
I . — Équations de lagrange et lagrangien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
404
II . — Hamiltonien et équations canoniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
408
III . — Lagrangien et hamiltonien d’une particule chargée . . . . . . . . . . . . . . . . . . . . . .
412
IV . — Déterminisme, imprédictibilité et chaos . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
413
417
25. Mouvement d’un solide autour d’un axe fixe
I . — La liaison pivot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
422
II . — Mouvement d’un solide autour d’un axe fixe . . . . . . . . . . . . . . . . . . . . . . . . .
422
III . — Machines tournantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
427
IV . — Équilibrage des machines tournantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
428
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
431
c Dunod – Toute reproduction non autorisée est un délit
26. Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
I . — La liaison sphérique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
435
II . — Gyroscope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
436
III . — Approximation gyroscopique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
440
IV . — L’approximation gyroscopique en magnétisme . . . . . . . . . . . . . . . . . . . . . . . .
443
V . — Mouvement de Poinsot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
447
VI . — Mouvement de Lagrange et Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
451
456
27. Oscillateurs couplés. Cas de N oscillateurs identiques
I . — Système de deux oscillateurs couplés . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
460
II . — Coordonnées normales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
469
III . — Modes de couplage de deux oscillateurs . . . . . . . . . . . . . . . . . . . . . . . . . . . .
473
IV . — Mouvement forcé d’un système de deux oscillateurs . . . . . . . . . . . . . . . . . . . . .
474
V . — Couplage de N oscillateurs identiques . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
475
479
x
Table des matières
28. Introduction à la mécanique des fluides. Statique des fluides
I . — Définitions et grandeurs caractéristiques . . . . . . . . . . . . . . . . . . . . . . . . . . .
483
II . — Pression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
485
III . — Équation d’état d’un fluide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
488
IV . — Statique des fluides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
489
V . — Théorème d’archimède et corps flottants . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
496
498
29. Cinématique des fluides
I . — Champ des vitesses dans un fluide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
504
II . — Accélération d’une particule de fluide . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
508
III . — Bilan de masse. Débit-masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
510
IV . — Différents types d’écoulements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
512
V . — Exemples de champs de vitesse irrotationnels . . . . . . . . . . . . . . . . . . . . . . . . .
517
VI . — Écoulement d’un fluide autour d’un obstacle . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
519
523
30. Équation d’Euler et relation de Bernoulli
I . — Équation d’Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
526
II . — Relation de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
530
III . — Applications de la relation de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . .
533
IV . — Équations-bilans dans les systèmes ouverts fluides . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
539
546
31. Fluides visqueux
I . — Viscosité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
551
II . — Dynamique des fluides visqueux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
554
III . — Forces exercées par les fluides en mouvement . . . . . . . . . . . . . . . . . . . . . . . . .
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
561
567
32. Ondes mécaniques dans un milieu continu
I . — Propagation d’ondes mécaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
571
II . — Aspect énergétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
577
III . — Réflexion et transmission des ondes mécaniques . . . . . . . . . . . . . . . . . . . . . . .
580
IV . — Acoustique physiologique
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
587
V . — Propriétés ondulatoires des ondes acoustiques . . . . . . . . . . . . . . . . . . . . . . . . .
588
Exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
595
Annexe 1. Les coniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
599
I . — Définition
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
599
II . — Équation polaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
600
III . — Équation cartésienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
600
IV . — Propriétés fondamentales des coniques . . . . . . . . . . . . . . . . . . . . . . . . . . . .
602
Annexe 2. Dérivées et différentielles
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
604
Table des matières
xi
I . — Dérivées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
604
II . — Différentielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
607
III . — Systèmes de coordonnées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
609
IV . — Formes différentielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
611
Annexe 3. Équations différentielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
613
I . — Équations différentielles linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
613
II . — Équation différentielle non linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
615
Annexe 4. Flux et circulation de vecteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
616
I . — Flux d’un champ de vecteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
616
II . — Circulation d’un champ de vecteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
621
III . — Opérateurs différentiels du second ordre . . . . . . . . . . . . . . . . . . . . . . . . . . .
623
IV . — Relations d’analyse vectorielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
624
Annexe 5. Simulations en mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
627
I . — Similitude et loi d’échelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
627
II . — Interaction forte entre nucléons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
633
III . — Satellites dans l’atmosphère . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
638
IV . — Portrait de phase d’oscillateurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
640
V . — Machine d’Atwood dansante (MAD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
645
Réponses aux vingt questions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
651
Solutions des exercices et problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
653
Bibliographie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
791
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
793
Les Anglais enseignent la mécanique comme
une science expérimentale ; sur le continent, on
l’expose toujours plus ou moins comme une science
déductive et a priori. Ce sont les anglais qui ont raison, cela va sans dire ; [...] Ce n’est pas tout, il n’y
a pas d’espace absolu [...].
Henri Poincaré
La science et l’hypothèse, p. 113, 1902
Avant-propos
Ce cours de mécanique newtonienne correspond globalement à l’enseignement donné dans les trois
années des licences de physique (mécanique incluse) des universités.
Il nous a paru pédagogiquement intéressant de le découper en leçons quasi autonomes. Un tel
découpage a entraîné quelques redites, qu’on voudra bien considérer comme des points importants toujours utiles de rappeler.
La première partie concerne d’abord la mécanique du corpuscule en interaction avec des systèmes que l’on schématise uniquement par les forces qu’ils exercent : force de pesanteur, force de
Lorentz, force de contact, force élastique, etc. Afin de rompre avec un exposé dépassé de la mécanique,
qui tend à réduire cette partie de la physique à un problème de projections de vecteurs et à une résolution d’équations différentielles, nous avons privilégié l’énergie dans la résolution des problèmes unidimensionnels et largement utilisé les possibilités qu’offrent, à des fins de discussions qualitatives, les
concepts d’énergie potentielle et d’énergie mécanique.
Dans la deuxième partie, on présente la mécanique des N corpuscules en interaction et on établit
les théorèmes de la quantité de mouvement, du moment cinétique et de l’énergie. On souligne alors
la complexité du problème et donc tout l’intérêt de l’approximation du problème à deux corps. On
termine cette partie en développant successivement les collisions newtoniennes de deux particules, et la
diffusion de particules. Cet ensemble constitue ce qui est en général traité en première année de licence
ou des classes préparatoires. Dans cette partie, on ne manque de rappeler que les lois de la mécanique
s’appliquent aussi aux systèmes vivants.
Avec la troisième partie, plus technique, la séparation est suffisamment nette. On commence par
la cinématique des corps indéformables (solides) et celle, très utile dans la pratique, des solides en
contact. Dans tout le développement, on s’appuie modérément sur le concept de torseur d’intérêt limité.
Ainsi, afin de compenser ce qui pourrait paraître comme un excès de formalisme, on insiste sur de nombreux thèmes physiques : les systèmes ouverts (fusées, etc.), la statique, la rotation d’un solide autour
d’un axe avec l’équilibrage des machines tournantes, le mouvement d’un solide autour d’un point, notamment le gyroscope, le mouvement de Lagrange et Poisson dans l’approximation gyroscopique et son
extension au magnétisme, précisément la Résonance Magnétique Nucléaire, enfin les oscillateurs couplés, en particulier les N oscillateurs identiques en interaction qui schématisent un solide déformable
unidimensionnel.
Avant-propos
xiii
Enfin, on aborde alors la quatrième et dernière partie sur les fluides : la statique, la cinématique des
écoulements, la dynamique des fluides non visqueux, la viscosité et la propagation des ondes acoustiques
dans les milieux continus.
En physiciens, nous sommes très sensibles aux lois de conservation et donc à l’interprétation des
théorèmes généraux de la mécanique en termes de bilans de grandeurs. Aussi avons-nous volontairement
subordonné le torseur dynamique au torseur cinétique et souligné l’importance des théorèmes d’Euler
en mécanique des systèmes ouverts, notamment dans le cas des fluides. Dans ce contexte, nous avons
tenu à donner un aperçu de la mécanique analytique, équations de Lagrange et équations canoniques
d’Hamilton, ces dernières étant en marge des programmes mais au cœur de la physique moderne.
Cet ouvrage s’adresse d’abord aux étudiants : il doit donc être clair et efficace. Aussi la typographie
est-elle volontairement aérée, le renvoi à des formules éloignées pratiquement inexistant, les appendices
et les mathématiques juste nécessaires. Des exercices et des problèmes, concrets et en nombre suffisant
(environ 320), sont rassemblés à la suite des différents chapitres et leurs solutions réunies à la fin de
l’ouvrage. Ces dernières permettront à l’étudiant, et plus largement à l’autodidacte, de tester sa propre
compréhension du cours, d’enrichir sa réflexion sur le contenu et surtout de développer sa capacité de
travail autonome.
Nous pensons avoir rassemblé, dans un seul ouvrage, tous les éléments indispensables à une acquisition solide des connaissances fondamentales en mécanique.
Cette nouvelle édition s’est enrichie de nombreux points d’actualisation, de précisions historiques,
de plusieurs problèmes originaux et d’une annexe supplémentaire centrée sur l’illustration et la gestion
informatique de plusieurs problèmes concrets de mécanique.
Ce livre prend en compte toutes les discussions intéressantes que j’ai eues avec des collègues des
universités et des classes préparatoires. Il s’inspire aussi des réactions exprimées par des étudiants de
la licence et de l’agrégation de physique. Nous les remercions pour leurs remarques et commentaires
constructifs.
c Dunod – Toute reproduction non autorisée est un délit
Toulouse, juin 2014
Les grands noms de la mécanique
Archimède
Mathématicien et physicien grec, né à Syracuse en 287 av. J-C. et mort en 242. Il fut à la fois grand
théoricien et habile expérimentateur. Sa contribution en physique la plus connue est le célèbre théorème
d’hydrostatique qui porte son nom.
Daniel Bernoulli
Mathématicien et physicien suisse, né à Groningue en 1700 et mort à Bâle en 1782. C’est à SaintPétersbourg qu’il mène des recherches en mécanique des fluides ; il publie sa contribution majeure
Hydrodynamica, en 1738, dans laquelle on peut reconnaître la célèbre équation de conservation de
l’énergie en mécanique des fluides et les éléments de la théorie cinétique des gaz.
Jacques Binet
Mathématicien et astronome français, né à Rennes en 1786 et mort à Paris en mai 1856. À sa
sortie de l’École polytechnique il devient répétiteur de géométrie descriptive dans cet établissement,
puis professeur de mécanique en remplacement de Simon Denis Poisson. Il est surtout connu pour
ses travaux dans le domaine de l’astronomie ; ses formules de cinématique donnent l’expression en
coordonnées polaires de la vitesse et de l’accélération des corps soumis à une accélération centrale,
telles les planètes du système solaire.
Tycho Brahe
Astronome danois, né à Knudsrup en 1546 et mort à Prague en 1601. En 1576, Frédéric II du Danemark le charge de construire un observatoire dans l’île de Hveen. Grand observateur, il accumule de
nombreuses données astronomiques, pendant une trentaine d’années. Il poursuit ses travaux à Prague,
assisté, peu avant sa mort, par un jeune astronome J. Kepler. Il reste cependant attaché aux idées géocentriques de Ptolémée.
Nicolas Copernic
Astronome polonais, né à Thorn en 1473 et mort à Frauenburg en 1543. Copernic, qui était chanoine, attendit la fin de sa vie pour publier son célèbre traité De revolutionibus. Son œuvre fut moins
inspirée par les observations astronomiques que par sa ferme conviction que le système de Ptolémée
manquait de simplicité, d’élégance, bref de symétrie. Ce dernier point l’incita à tort à supposer que les
trajectoires des planètes étaient nécessairement circulaires, ce que Kepler corrigea un siècle plus tard
grâce aux observations de Brahe.
Gaspard Coriolis
Ingénieur français, né à Paris en 1792 et mort à Paris en 1843. Devenu professeur de mécanique,
il met en évidence l’existence, dans tout référentiel en mouvement accéléré par rapport au référentiel
terrestre, d’une force d’inertie proportionnelle à la vitesse.
Charles de Coulomb
Ingénieur et physicien français, né à Angoulême en 1736 et mort à Paris en 1806. Initialement
ingénieur de l’armée, il abandonne cette activité à 36 ans pour se consacrer à la recherche scientifique.
Il publie en 1779 un traité sur la théorie des machines simples dans lequel il donne les lois du frottement
solide. Mais son œuvre principale concerne l’électromagnétisme, notamment la force d’interaction entre
charges électriques, proportionnelle à 1/r2 , et le magnétisme terrestre.
Les grands noms de la mécanique
xv
Leonhard Euler
Mathématicien suisse, né à Bâle en 1707 et mort à Saint-Pétersbourg en 1783. Il applique à la
mécanique les résultats importants qu’il établit sur l’intégration des équations différentielles. Il publie
en 1736 un Traité complet de mécanique.
Léon Foucault
Physicien français, né à Paris en 1819 et mort à Paris en 1868. Autodidacte et inventeur de talent, il
apporte des contributions importantes, notamment en optique pour corriger les miroirs de leurs aberrations géométriques et pour mesurer avec précision la vitesse de la lumière. Il est surtout connu pour ses
études en mécanique ; il met en évidence, de façon spectaculaire, l’influence de la rotation de la Terre
sur le comportement d’un pendule simple (pendule de Foucault) et invente le gyroscope.
Galileo Galilei dit Galilée
Astronome et physicien italien, né à Pise en 1564 et mort à Arcetri (près de Florence) en 1642.
Il est considéré comme le précurseur de la science moderne, d’une part en utilisant les mathématiques
pour décrire les lois de la physique, et d’autre part en testant la validité de ces lois par l’expérimentation. Ses principales contributions en astronomie sont l’observation de la surface de la Lune et la
découverte des satellites de Jupiter à l’aide d’instruments d’optique qu’il a lui-même mis au point. L’ensemble est publié en 1610 dans Le messager des étoiles. Cependant, c’est sa contribution en mécanique
qui est la plus célèbre. En étudiant le mouvement des corps, il découvre les lois de la chute libre, notamment l’indépendance de la masse lorsque la résistance de l’air est négligée, l’isochronisme des petites oscillations d’un pendule ; il perçoit aussi le principe de l’inertie et se rallie aux idées héliocentriques de Copernic. Il publie alors le Dialogue sur les deux principaux systèmes du monde en 1632, ce
qui lui vaut une condamnation par l’Inquisition, en raison de sa vision copernicienne du monde (mobilité de la Terre). C’est à la fin de ce procès qu’il aurait prononcé la célèbre phrase « eppur si muove »
(Et pourtant, elle tourne).
c Dunod – Toute reproduction non autorisée est un délit
William Rowan Hamilton
Mathématicien et physicien irlandais, né en 1806 à Dublin et mort en 1865 près de Dublin. Enfant prodige puis étudiant génial, il impressionne à 22 ans l’Académie Royale d’Irlande en présentant
un exposé moderne sur la théorie des rayons lumineux. Ce travail est le point de départ d’une contribution capitale en dynamique qui s’achèvera en 1833 sur une remarquable analogie entre l’optique et
la mécanique. Cette synthèse débouchera sur la relation de L. de Broglie et sur l’équation de Schrödinger en mécanique ondulatoire (cf. Quantique).
Christian Huygens
Mathématicien, astronome et physicien hollandais, né à La Haye en 1629 et mort en 1695. Il fut
à l’origine de la théorie ondulatoire de la lumière et, à ce titre, s’opposa à la théorie corpusculaire de
Newton. Il interpréta la propagation rectiligne de la lumière dans les milieux homognes et isotropes en
introduisant le concept de surface d’onde. Expérimentateur confirmé, il découvrit, avec les instruments
d’optique qu’il mit lui-même au point (oculaire d’une lunette astronomique), les anneaux de Saturne
ainsi que son satellite Titan. En mécanique, on lui attribue l’invention du pendule cycloïdal.
Johannes Kepler
Astronome allemand, né à Weil en 1571 et mort à Ratisbonne en 1630. D’origine modeste, Kepler
se révèle vite très bon théoricien et adepte des idées héliocentriques de Copernic. Chassé de Graz où il
enseignait les mathématiques, il se réfugie à Prague dans l’observatoire de Brahe. Les observations de
ce dernier lui permettent de découvrir les célèbres lois qui portent son nom.
xvi
Les grands noms de la mécanique
Johann Kœnig
Mécanicien allemand, né à Büdinger en 1712 et mort à Amerongen aux Pays-Bas en 1757. Sa
contribution importante en mécanique est connue sous le nom de théorèmes de Kœnig, à ne pas
confondre avec le mécanicien français Gabriel Kœnigs.
Joseph-Louis de Lagrange
Mathématicien italo-français, né à Turin en 1736 et mort à Paris en 1813. Il est considéré comme
l’un des plus grands mathématiciens de son époque. Sa contribution majeure en mécanique, a été publiée
en 1788 sous le titre Mécanique analytique ; on y trouve les célèbres équations qui permettent d’étudier
le mouvement des corps sans utiliser la géométrie et le calcul vectoriel. À la mort de Frédéric II de
Prusse, qui l’avait chargé de diriger la section mathématique de l’Académie des Sciences de Berlin, il
est accueilli à Paris pour poursuivre ses travaux.
Pierre-Simon de Laplace
Astronome, mathématicien et physicien français, né à Beaumont-en-Auge en 1749 et mort à Paris en 1827. Bien que professeur de mathématiques et homme politique, ses travaux en physique sont
nombreux. Il signe diverses contributions sur la capillarité, la propagation du son dans l’air, l’évolution adiabatique des gaz et le travail des forces électromagnétiques. Cependant, c’est sa publication sur
la mécanique céleste, Exposition du système du monde, qui est la plus remarquée. On y trouve développées les conditions d’un déterminisme rigoureux à la base d’une physique totalement prédictive.
Pierre Louis de Maupertuis
Philosphe et scientifique français, né à Saint-Malo en 1698 et mort à Bâle en 1759. Il est nommé
membre de l’Académie des sciences dès 1723. Il publie alors divers travaux de mécanique, d’astronomie
et de biologie. En 1728, il se rend en Angleterre et est élu membre de la Royal Society ; il découvre là
les idées de Newton, en particulier la gravitation universelle. Il devient un ardent défenseur en France
de ces idées, aboutissant à l’aplatissement de la Terre aux pôles, et donc un opposant à J. Cassini, qui
affirmait au contraire que la Terre était allongée aux pôles. Les mesures directes auxquelles il participa
activement, en se rendant en Laponie, confirme la thèse de Newton. Il publie en 1746 un article sur le
principe de moindre action, dont l’argumentation finaliste est critiquée, notamment par Diderot.
Isaac Newton
Mathématicien, astronome et physicien anglais, né en 1642 à Woolsthorpe et mort en 1727 à Kensington. Il est considéré avec Einstein comme le plus grand physicien de tous les temps. Curieusement et
comme ce dernier, il fut un élève moyen qui ne révéla au collège aucune capacité exceptionnelle. C’est
à Cambridge que l’on remarqua ses grandes possibilités. Plus influencé par Descartes que par Aristote, il publie en 1687 une synthèse magistrale de la mécanique Principia mathematica ; il y énonce
les fondements de la dynamique et relie, en introduisant la loi de la gravitation universelle, le mouvement des planètes et la chute des corps. En optique, il s’opposa à C. Huygens et R. Hooke, adeptes
d’une théorie ondulatoire de la lumière. Cependant, sa contribution faite dans “Optics” est elle aussi exceptionnelle : il interprète la décomposition spectrale de la lumière, à partir d’expériences conues avec
des prismes, et montre que la couleur blanche est un mélange des différentes couleurs spectrales ; il explique aussi la formation des images par des miroirs et suggère même la possibilité d’échange entre
lumière et matière.
Blaise Pascal
Mathématicien, physicien et philosophe français, né à Clermont-Ferrand en 1623 et mort à Paris en
1662. Enfant et adolescent génial, Pascal est vite reconnu par toute la communauté scientifique comme
un mathématicien de tout premier plan. Sa contribution la plus importante en physique concerne la
statique des fluides.
Les grands noms de la mécanique
xvii
Henri Pitot
Ingénieur français, né à Aramon (Gard) en 1695 et mort en 1771. Après des études en mathématiques et en astronomie, il devient assistant du physicien Réaumur en 1723. Spécialisé en hydraulique, il
devient surintendant du Canal du Midi et construit un aqueduc pour l’alimentation en eau de Montpellier. Il participe notamment à la restauration du pont du Gard par la réalisation d’un second ouvrage d’art,
accolé à ce dernier, et réalise de nombreuses digues de protection, notamment sur le cours du fleuve Vidourle. Il est surtout connu pour être l’inventeur du tube qui permet de mesurer la vitesse d’écoulement
d’un fluide.
Jean-Louis Poiseuille
Médecin et physicien français, né à Paris en 1799 et mort à Paris en 1869. Son étude de la circulation sanguine le conduit à analyser avec soin l’écoulement laminaire des fluides visqueux dans les
tuyaux cylindriques.
Henri Resal
Ingénieur et mathématicien français, né à Plombières en 1828 et mort à Anemasse en 1896. Professeur de mécanique à l’École polytechnique, il résout de façon élégante, en projetant dans un système
d’axes adapté, le mouvement des solides de révolution en rotation autour d’un point.
Osborne Reynolds
Ingénieur anglais, né à Belfast en 1842 et mort à Watchet en 1912. Il apporta en 1883 une contribution importante dans la distinction quantitative entre les régimes d’écoulement laminaire et turbulent.
c Dunod – Toute reproduction non autorisée est un délit
Ernest Rutherford
Physicien britannique, né à Brightwater, près de Nelson, en Nouvelle Zélande en 1871 et mort
à Cambridge en 1937. Même si très jeune, en classe, il excellait sur tous les sujets, Rutherford fut
intéressé surtout par les sciences et les mathématiques. Boursier, il poursuit ses études en Angleterre, à
Cambridge, où il devint l’élève de J.J. Thomson. Après avoir été professeur à Montréal, à Manchester,
puis à Cambridge en 1909, il prit la direction du Laboratoire Cavendish en 1919. Il est surtout connu
pour ses travaux sur la radioactivité, notamment l’étude des rayons a , qu’il identifie à des noyaux
d’hélium, et de leur diffusion, ce qui lui permet d’établir le modèle actuel de la structure atomique. Il
reçut, en 1908, le prix Nobel de chimie.
Giovanni Battista Venturi
Physicien italien, né à Reggio d’Émilie en 1746 et mort en 1822 dans sa ville natale. En 1773, il devient professeur de géométrie et philosophie à l’Université de Modène et en 1776 professeur de physique
à l’École du génie militaire de Modène. Établi à Paris en 1796, c’est suite à ses nombreux travaux en dynamique des fluides qu’il décrit dans un ouvrage ce qui deviendra l’effet Venturi, précisément la relation
entre la vitesse d’un fluide et sa pression.
Evangelista Torricelli
Physicien italien, né à Faenza en 1608 et mort à Florence en 1647. Il est surtout connu pour ses
travaux sur la pression atmosphérique, effectués à la demande des fontainiers de Florence ; ces derniers
souhaitaient élever l’eau à plus de 10 m à l’aide d’une pompe aspirante.
Constantes physiques, notations et symboles
Les symboles utilisés sont généralement ceux recommandés par l’AFNOR.
I . — CONSTANTES PHYSIQUES
G = 6,673 84(80) × 10−11 m3 .kg−1 .s −2
c = 299 792 458 m.s −1
h = 6, 626 069 57(29) × 10−34 J.s
me = 0, 910 938 291(40) × 10 −30 kg
mp = 1, 672 621 777(74) × 10 −27 kg
NA = 6, 022 141 29(27) × 10 23 mol−1
R = NAkB = 8, 314 462(75) J.mol−1.K −1
kB = R/NA = 1, 380 648 8(13) × 10 −23 J.K −1
e = 1, 602 176 565(35) × 10−19 C
F = NAe = 96 485, 339 9(24) C.mol−1
m0 = 4p × 10−7 N.A−2
ε0 = (m 0 c2 )−1 = 8, 854 187 817... × 10−12 F.m −1
e2
q2e =
4pε 0
Constante newtonienne de gravitation
G = (6,673 84 ± 0,000 80) × 10−11 m3 .kg−1 .s−2
Constante d’Einstein ou vitesse de la lumière
dans le vide (valeur exacte)
Constante de Planck
Masse de l’électron
Masse du proton
Nombre d’Avogadro
Constante molaire des gaz parfaits
Constante de Boltzmann
Charge élémentaire (charge de l’électron : −e)
Constante de Faraday
Perméabilité du vide (valeur exacte)
Permittivité du vide (valeur exacte)
q2e = 230, 707 705 6 × 10 −30 S.I
II . — CONSTANTES DU SYSTÈME SOLAIRE
II . 1 . — Caractéristiques du Soleil
Masse
Rayon
Diamètre apparent
M S = 1, 989 1 × 10 30 kg ≈ 2 × 1030 kg
RS = 696 000 km ≈ 0, 7 × 10 9 m
u S = 32 ≈ 0, 5 ◦
xix
Constantes physiques, notations et symboles
II . 2 . — Caractéristiques de la Terre
Masse
Rayons polaire
équatorial
moyen
Demi-grand axe de l’orbite elliptique
Excentricité
Vitesse orbitale moyenne
M T = 5, 972 × 10 24 kg ≈ 6 × 1024 kg
R T ,p = 6 357 km = 6, 357 × 10 6 m
R T ,e = 6 378 km = 6, 378 × 10 6 m
R T ≈ 6 371 km ≈ 6, 4 × 106 m
a ≈ 149, 6 × 10 9 m
e ≈ 0, 016 71
v T ≈ 29, 8 km.s−1 .
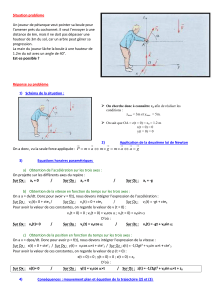
Le plan de la trajectoire de la Terre autour du Soleil est le plan de l’écliptique. Il fait avec le plan
équatorial l’angle pratiquement constant u = 23◦ 26 (Fig. 1a).
Le parsec, mot condensant « parallaxe d’une seconde », est la distance à laquelle le rayon de l’orbite
terrestre autour du Soleil est vu sous un angle de 1 seconde d’arc (5 mrad) (Fig. 1b) :
1 pc ≈ 3, 085 677 × 1016 m soit
1 pc ≈ 30, 85 Pm
On utilise souvent en astrophysique l’année-lumière (al) qui est la distance parcourue par la lumière, dans le vide, pendant une année julienne de 365,25 jours :
1 al = 299 792 458 × 365, 25 × 24 × 3 600 ≈ 9, 460 730 ≈ 9, 46 Pm
On a donc 1 pc ≈ 3, 26 al .
23◦ 26
Axe polaire
E
Soleil
P
H
Terre
Plan de l'écliptique
O
100 1 pc
Plan équatorial
T
A
c Dunod – Toute reproduction non autorisée est un délit
a)
F IG . 1. — a) Plan de l’écliptique et plan équatorial
S
Plan
de l'écliptique
b)
b) Parsec
II . 3 . — Caractéristiques des planètes
Les planètes Mercure, Vénus, Mars, Jupiter et Saturne sont connues depuis l’Antiquité ; elles sont à
l’origine des noms des jours de la semaine, respectivement : Mercredi, Vendredi, Mardi, Jeudi, Samedi.
Lundi vient de Lune comme « Monday » vient de « Moon » en anglais ; quant au dimanche, c’est le jour
du Soleil en anglais « Sunday ».
La planète Uranus fut découverte en 1781 par l’astronome allemand William Herschel. En 1846,
le Français Urbain Le Verrier et séparément l’Anglais John Adams « inventèrent » Neptune à partir des
écarts observés entre la trajectoire théorique d’Uranus et sa trajectoire réelle, ce qui permit sa découverte
par l’astronome berlinois Johann Galle quelques mois après.
Les caractéristiques des huit planètes du système solaire sont rassemblées dans le tableau 1. Les
unités de ces grandeurs sont relatives à celles de la Terre.
xx
Constantes physiques, notations et symboles
Planètes
Masse
Rayon
Distance
au Soleil
Période sidérale
de rotation propre
Période sidérale
de révolution
autour du Soleil
Excentricité
Mercure
0,555
0,382
0,387
58,6 j
0,24
0,206
Vénus
0,815
0,949
0,723
243 j
0,615
0,007
Terre
1
1
1
1j
1
0,017
Mars
0,107
0,533
1,52
24 h 37 min
1,88
0,093
Jupiter
318
11,2
5,20
9 h 55 min
11,86
0,048
Saturne
95,1
9,45
9,55
10 h 39 min
29,46
0,056
Uranus
14,5
4,01
19,2
17 h 14 min
84,07
0,046
Neptune
17,1
3,88
30,1
16 h 7 min
164,81
0,009
TAB . 1. — Caractéristiques principales des huit planètes du système solaire
II . 4 . — Caractéristiques de la Lune
Masse
Rayon
Distance Terre-Lune
Diamètre apparent
Vitesse orbitale moyenne
ML ≈ 7, 35 × 10 22 kg ≈ MT /81
RL ≈ 1737 km = 1, 7 × 10 6 m
DL ≈ 383 400 km = 383, 4 × 106 m
uL ≈ 33 ≈ 0, 5◦
vL ≈ 1 km.s−1
Période sidérale de révolution autour de la Terre : 27 j 7 h 3 min
Lunaison (durée entre deux nouvelles Lunes) : 29 j 12 h 44 min
Angle d’inclinaison du plan de l’orbite lunaire par rapport
au plan de l’écliptique : 5, 14 ◦
III . — NOTATIONS
R
r = OA
(d U/ d t)R
v, v
a, a
S
Sd
p, P
LO
P
W
Ek
Ep
référentiel (repère d’espace et de temps)
vecteur position d’un point courant A
dérivée du vecteur U par rapport au temps, relativement à la base de R
vecteur vitesse de A par rapport à R et sa norme
vecteur accélération de A par rapport à R et sa norme
solide (indéformable)
système matériel (déformable)
quantité de mouvement d’un point ou d’un système
moment cinétique au point O d’un point ou d’un système
puissance
travail
énergie cinétique
énergie potentielle
Constantes physiques, notations et symboles
c Dunod – Toute reproduction non autorisée est un délit
Em
VS/R
C, G
R0
Rg
R∗
g, g
G, F
E, V
B
[P]O ou [P, L O]
[D]O ou [D, NO]
[I]O
ex , ey, e z
x, y, z
r, w, z
r, u, w
c, u, f
ẋ
x(t) = x m cos(vt + fx )
x
x(t) = x m exp[j(vt + fx )]
T, f , v
xm = xm exp(jfx )
x
|x|
x∗
Re{x}, Im{x}
P(t)
ε
F(r)
C(r)
L
H
p
r
Jm
qm
qv
kT
kS
xxi
énergie mécanique
vecteur vitesse de rotation du solide S par rapport à R
centre de masse ou centre d’inertie (≈ centre de gravité)
référentiel de Copernic
référentiel géocentrique
référentiel du centre de masse ou référentiel barycentrique
champ de pesanteur et sa norme
champ et potentiel de gravitation
champ et potentiel électriques
champ magnétique
torseur cinétique au point O
torseur dynamique au point O
opérateur ou tenseur d’inertie en O
base orthonormée directe de R
coordonnées cartésiennes de r
coordonnées cylindriques
coordonnées sphériques
angles d’Euler (précession, nutation, rotation propre)
fonction dérivée de x par rapport au temps
élongation sinusoïdale
valeur complexe de x
expression complexe de l’élongation sinusoïdale
période, fréquence, pulsation
amplitude complexe
valeur complexe de x
module de x
complexe conjugué de x
parties réelle et imaginaire du signal x
puissance instantanée
facteur de restitution en énergie cinétique
fonction potentiel des vitesses dans le plan Oxy (v = − grad F)
fonction courant dans le plan Oxy (v = rot(−Ce z ))
lagrangien
hamiltonien
pression
masse volumique
vecteur courant de matière
débit-masse
débit-volume
coefficient de compressibilité isotherme
coefficient de compressibilité isentropique
xxii
Constantes physiques, notations et symboles
Zc
h
n = h/r
impédance acoustique caractéristique
coefficient de viscosité
viscosité cinématique
ln
lg
lb
exp
≈
∼
logarithme népérien
logarithme décimal
logarithme binaire
exponentielle
sensiblement égal à
de l’ordre de
IV . — ALPHABET GREC
alpha
A
a
eta
H
h
nu
N
n
tau
T
t
beta
B
b
theta
Q
u
xi
J
j
upsilon
Y
y
gamma
G
g
iota
I
i
omicron
O
o
phi
F
f
delta
D
d
kappa
K
k
pi
P
p
chi
X
x
epsilon
E
e
lambda
L
l
rho
P
r
psi
C
c
zeta
Z
z
mu
M
m
sigma
S
s
omega
V
v
V . — MULTIPLES ET SOUS-MULTIPLES EN NOTATION SCIENTIFIQUE
Nom
yotta
zetta
exa
péta
téra
giga
méga
kilo
milli
micro
nano
pico
femto
atto
zepto
yocto
Facteur
24
10
1021
1018
1015
10 12
109
106
103
10∗ 3
10∗ 6
10∗ 9
10∗ 12
10∗ 15
10∗ 18
10∗ 21
10∗ 24
Origine
Signification
Année d’adoption
Symbole
grec (októ)
latin (septem)
grec (hex)
grec (pente)
grec (teras)
grec (gigas)
grec (megas)
grec (chiloi)
latin (mille)
grec (mikros)
latin (nanus)
italien (piccolo)
danois (femtem)
danois (atten)
latin (septem)
grec (októ)
huit
sept
six
cinq
monstre
géant
grand
mille
mille
petit
nain
petit
quinze
dix-huit
sept
huit
1991
1991
1991
1975
1960
1960
1960
1795
1960
1960
1960
1960
1964
1964
1991
1991
Y
Z
E
P
T
G
M
k
m
m
n
p
f
a
z
y
Description de l’ouvrage
L’ouvrage comporte plusieurs parties qui correspondent aux différentes étapes de l’enseignement
de la mécanique dans les universités ou dans les classes préparatoires aux Grandes Écoles scientifiques.
En dehors de la leçon 1 qui rassemble les rappels et les compléments sur le calcul vectoriel, le déroulement du cours est le suivant :
i) Partie I, Licence 1, semestre I
Leçons 2 à 12 : cinématique, dynamique et énergétique du point matériel, libre ou gêné, par rapport
à un référentiel galiléen ou non.
ii) Partie II, Licence 1, semestre II
Leçons 13 à 15 : Dynamique et énergétique des systèmes de N points matériels (problème à deux
corps, collisions et diffusion de particules).
iii) Partie III, Licence 2, semestre I
Leçons 16 à 21 : Dynamique et énergétique du solide et des systèmes de solides.
c Dunod – Toute reproduction non autorisée est un délit
iv) Partie IV, Licence 2, semestre II, et licence 3
Leçons 22 à 32 : Applications de la mécanique des solides et introduction à la mécanique des
fluides.
Les leçons 1, 2, 3, 4, 13, 16, 17, 18, 24, 28 ont un rôle central car elles contiennent les éléments
indispensables (définitions, lois et principes) à l’étude des leçons qui suivent. Il faut donc les étudier
avant d’aborder les suivantes. Même si ces dernières sont présentées dans un certain ordre, il est possible
de les lire dans un ordre différent qui tienne compte des préoccupations et des intérêts du lecteur ; en
effet, les leçons sont quasi autonomes et le renvoi à des formules éloignées pratiquement inexistant.
Par exemple, si l’on souhaite étudier la mécanique des solides, il est conseillé de lire les leçons 16,
17 et 18 avant ; de même, si l’on ne s’intéresse qu’à la mécanique des fluides, mieux vaut lire d’abord
la leçon 28.
Méthode de travail
Lecture des leçons
Dans une première phase, une leçon doit être lue une première fois, en insistant sur l’introduction,
laquelle situe la leçon dans le cours, et sur la conclusion qui répertorie l’ensemble des résultats essentiels.
Dans une deuxième phase, l’étudiant doit refaire avec soin tous les calculs intermédiaires.
Enfin, une dernière lecture devrait permettre d’appréhender complètement la leçon, notamment les
résultats essentiels, les exemples significatifs et les ordres de grandeur.
xxiv
Description de l’ouvrage
Exercices et problèmes
Une fois la lecture de la leçon achevée, l’étudiant doit passer à la phase d’application en faisant des
exercices simples et courts, directement liés au contenu de la leçon ; il doit essayer de résoudre ces exercices avec le seul support que constitue le cours. En cas de difficultés, un coup d’œil rapide sur la
solution, proposée en fin d’ouvrage, devrait l’aider. Éviter cependant la simple lecture de la solution
proposée et la mémorisation de la démonstration : mieux vaut revenir sur la leçon pour résoudre l’exercice. En cas de difficulté majeure, lire la solution et tenter de la refaire sans aucune aide un ou deux
jours plus tard.
Une fois ces exercices rédigés, tenter de résoudre des problèmes d’examens et concours généralement plus longs.
Révision
Pour réviser, une ultime lecture devrait conforter l’apprentissage. Ne pas hésiter à souligner au
crayon les parties essentielles et à porter en marge des remarques personnelles suggérées par d’autres
ouvrages ou documents annexes, tels que des revues grand public (La Recherche, Science et Vie, Ciel
et Espace, etc.).
Comment résoudre un problème de mécanique
On résout correctement un problème de mécanique si l’on s’astreint à répondre successivement à
plusieurs questions, même lorsque le texte n’invite pas à y répondre explicitement.
Quel est le système étudié ?
Il faut définir le système dont on veut étudier le mouvement, c’est-à-dire le délimiter en précisant
sa frontière commune avec l’extérieur.
Quel est le référentiel ?
Le temps étant un paramètre universel en mécanique newtonienne, définir le référentiel revient à
préciser le repère d’espace par rapport auquel on se propose d’étudier le mouvement d’un système. Il est
commode de lui associer une base orthonormée ( ex , e y , e z ). On désigne généralement ce référentiel
par son origine O et une base orthonormée, ce que l’on écrit sommairement R = Oxyz .
i) Ce référentiel est-il galiléen ou non ?
ii) Est-il terrestre ou non ?
iii) Si le référentiel est terrestre, on peut le considérer comme galiléen à condition de substituer à
la force de gravitation le poids et d’exclure les mouvements très précis (déviation vers l’est. . .) ou très
rapides (pour v > 700 m . s−1 , le terme de Coriolis est supérieur à 1 % du poids).
iv) Si le référentiel a un mouvement accéléré par rapport au référentiel terrestre, il faut ajouter les
forces d’inertie d’entraînement et de Coriolis. Dans le cas où ce mouvement se limite à une translation,
la force de Coriolis est nulle.
Quel est le bilan des forces ?
Par forces, on entend plus largement forces et moments. On doit distinguer les forces extérieures
et les forces intérieures au système considéré, les forces données et les forces inconnues, les forces qui
xxv
Description de l’ouvrage
dérivent d’une énergie potentielle et les autres. Dans le tableau 2, on énumère les principales forces qui
apparaissent dans les problèmes concrets et on donne l’expression des énergies potentielles associées.
Quel est le nombre de degrés de liberté ?
Les degrés de liberté sont les paramètres {q i } dont dépend la position d’un système : a priori, un
point en a trois, un solide six, un ensemble de n points et de s solides en a 3n + 6s . Les contraintes
limitent généralement ce nombre ; un solide, dont un point est fixé et qui tourne autour d’un axe déterminé, n’a plus qu’un seul degré de liberté. La connaissance de l’état du système exige en plus un nombre
identique de données sur les dérivées q̇i
Remarque : Une condition de roulement sans glissement intégrable diminue le nombre de degrés de
liberté.
Force
Énergie potentielle
Force de gravitation (−Gm 1m2/r 2) er
Ep = −Gm1 m 2/r + Cte
Ep = −mg · OA + Cte = mgz + Cte
Force de pesanteur mg
(l’axe Oz est vertical ascendant)
Force électrostatique qE
E p = qV + Cte
Force magnétique qv × B
ne travaille pas
Force de rappel d’un ressort −K (x − l 0) e x
Ep = K (x − l0 )2/2 + Cte
Couple de torsion d’un fil −C(u − u0 ) ez
Ep = C(u − u 0 )2/2 + Cte
Force de frottement visqueux −av ou −bv 2v/v
pas d’énergie potentielle
Force de frottement solide (R, G O)
pas d’énergie potentielle
c Dunod – Toute reproduction non autorisée est un délit
Force d’inertie d’entraînement de
translation uniforme : −m ae = −m aO
Force d’inertie d’entraînement de
rotation uniforme : −m ae =
mV 2
HA
Force d’inertie de Coriolis −m a C = 2mV × v
Ep = m aO · OA + Cte
E p = −mV2HA 2/2 + Cte
ne travaille pas
TAB . 2.
Quelles sont les équations du mouvement ?
i) Si le système n’a qu’un seul degré de liberté et si les seules forces de puissances non nulles
dérivent d’une énergie potentielle, appliquer la conservation de l’énergie (intégrale première de l’éner-
xxvi
Description de l’ouvrage
gie) :
E m = Ek + Ep = Cte
Cette équation suffit pour connaître le mouvement.
ii) Si le système a plusieurs degrés de liberté, rechercher en priorité les intégrales premières :
conservation de l’énergie, conservation du moment cinétique en projection suivant un axe si le système
tourne sans frottement autour de cet axe, etc.
iii) Exploiter d’abord le caractère vectoriel des théorèmes généraux :
dP
= MaC = Sex et
dt
d LO
= MO, ex
dt
iv) Si le système est soumis à une réaction inconnue passant par un point, appliquer le théorème du
moment cinétique en ce point de telle sorte que la contribution de cette force inconnue disparaisse.
Quelles sont les expressions des éléments cinétiques P , LO et E k ?
Bien que technique, cette question joue un rôle important. Il faut :
i) décomposer le système en éléments simples et utiliser les propriétés d’additivité,
ii) appliquer les théorèmes de Kœnig, lorsque le système n’a pas de point fixe dans le référentiel
d’étude,
iii) utiliser les bases principales d’inertie, ce qui exige d’adopter une base de projection différente
de la base du référentiel, et donc d’utiliser la formule de Bour :
dL
dL
=
+ VR /R × L
dt R
d t R
iv) Choisir les bases de projection les plus commodes : si le mouvement est rectiligne, projeter les
vecteurs suivant l’axe du mouvement ; si la trajectoire d’un point est connue, utiliser les coordonnées
intrinsèques ; s’il s’agit du mouvement d’un solide de révolution autour d’un point, utiliser la base de
Resal avec les angles d’Euler, etc.
Comment résoudre les équations différentielles ?
C’est encore un problème technique. Les équations différentielles le plus souvent rencontrées en
mécanique sont les suivantes :
ẍ +
ẋ
+ v20 x = a
t
(caractéristique des oscillations)
v
= a (caractéristique de la mise en rotation d’une machine)
t
La résolution de ces équations linéaires ne présente pas de difficulté. La conservation de l’énergie permet généralement d’analyser qualitativement le mouvement et donc de discuter des divers mouvements
possibles d’un système. Cette analyse est très intéressante, notamment lorsque l’intégration de l’équation différentielle est délicate.
v̇ +
Quelle est l’interprétation des résultats obtenus ?
Cette dernière phase est capitale, car elle permet de vérifier les calculs et donc de revenir sur des
erreurs de signes décisives ; par exemple, dans l’équation oscillante ẍ + v 20 x = 0 , l’erreur de signe
exclut toute oscillation, ce qui doit pouvoir être décelé par une analyse préliminaire du mouvement, à la
fois qualitative et intuitive.
La mécanique en vingt questions
1. Pourquoi tire-t-on généralement les fusées vers l’est à partir d’une base de lancement proche de
l’équateur ?
2. Un corps abandonné au sommet du mât vertical d’un bateau, qui est animé d’un mouvement de
translation rectiligne uniforme par rapport à un référentiel terrestre, tombe au pied du mât. Pourquoi ?
3. Alors qu’une énergie cinétique est toujours non négative, pourquoi l’énergie mécanique d’un système
peut-elle être négative ?
4. Pourquoi la force de gravitation, qui est de loin la plus faible des forces fondamentales, est-elle, à
l’échelon de l’Univers, la plus influente ?
5. Pourquoi la force de Coriolis terrestre intervient-elle dans l’expression de la loi fondamentale dans
un référentiel terrestre et non la force d’inertie d’entraînement terrestre ?
6. On dit que la verticale ne passerait pas par le centre de la Terre, même si cette dernière était sphérique.
Pourquoi ?
7. Pourquoi la chute identique de deux corps différents dans le vide est-elle un fait exceptionnel ?
8. Pourquoi y-a-t-il impesanteur (ou microgravité) dans un satellite artificiel ?
9. Les marées sont attribuées à la non-uniformité du champ de gravitation G a dû aux astres autres que
la Terre. Pourquoi la contribution de ces astres est-elle proportionnelle à M /D3 , M étant leur masse
et D leur distance à la Terre ?
10. Pourquoi la Terre a-t-elle un mouvement plan autour du Soleil (plan de l’écliptique) ?
11. Pourquoi faut-il freiner les satellites provenant de la Terre lorsqu’on veut qu’ils aient une trajectoire
circulaire autour de la Lune ?
12. Pourquoi la planète la plus éloignée du Soleil a-t-elle la période de révolution la plus grande ?
13. Pourquoi un satellite soumis à une force de frottement a-t-il sa vitesse qui augmente ?
14. Pourquoi l’avance du périhélie de Mercure n’est-elle pas interprétée comme celle d’Uranus par la
perturbation due à une autre planète ?
15. Un champ magnétique stationnaire n’augmente pas la norme de la vitesse d’une particule chargée.
Pourquoi est-il si largement utilisé dans les accélérateurs de particules ?
16. Pourquoi l’énergie mécanique d’un système isolé ne se conserve-t-elle pas dans tous les cas ?
17. Pourquoi le roulement sans glissement présente-t-il un intérêt énergétique ?
18. Lorsqu’on effectue le bilan des forces qui agissent sur un véhicule ou sur une personne qui marche,
le long d’un trajet horizontal, on est amené à conclure que c’est la force de frottement qui permet le
déplacement. Est-ce paradoxal ? Pourquoi ?
19. Pourquoi notre signe zodiacal (Bélier, Taureau, . . ., Poissons) ne coïncide-t-il pas avec la constellation dans laquelle se trouvait le Soleil le jour de notre naissance ?
20. Pourquoi un joueur de football peut-il, seul, dans un tir de corner, marquer un but ?
1
Calcul vectoriel. Torseurs
Analyse dimensionnelle
Même si l’addition vectorielle date des Grecs pour les vitesses et du XVI e siècle pour les forces
(règle du parallélogramme), la forme actuelle du calcul vectoriel est attribuée aux mathématiens irlandais W. Hamilton en 1843 et allemand H. Grassmann en 1855. Comme outil mathématique en physique,
il joue un rôle considérable car de nombreuses grandeurs physiques (vitesse, accélération, quantité de
mouvement, etc.) sont représentées par des vecteurs.
Il apparaît donc naturel de rappeler, avant tout développement, les propriétés des vecteurs et notamment les opérations telles que l’addition vectorielle, le produit scalaire et le produit vectoriel.
On introduit ensuite la notion de vecteur lié et celle de torseur associé à un champ de vecteurs
antisymétrique. Ce dernier concept est techniquement commode lorsqu’on est conduit à considérer des
ensembles de vecteurs liés.
c Dunod – Toute reproduction non autorisée est un délit
Enfin, on présente l’analyse dimensionnelle en soulignant son intérêt majeur en physique, pas uniquement en mécanique.
I . — ESPACE VECTORIEL
I . 1 . — Définition
On appelle espace vectoriel E sur un corps commutatif K un ensemble d’éléments, appelés vecteurs, qui satisfait aux propriétés suivantes :
i) l’ensemble E est muni d’une structure de groupe commutatif pour une loi de composition interne, l’addition vectorielle, notée simplement +.
ii) Pour deux vecteurs U et V appartenant à E, on a, si l et m appartiennent à K :
l(U + V) = lU + lV
(l + m)U = lU + mU
l(mU) = (lm)U
1U = U
2
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
I . 2 . — Espace vectoriel euclidien
Un espace vectoriel E est euclidien s’il est muni d’un produit scalaire f qui, à deux vecteurs U et V de E, fait correspondre le nombre réel f (U, V) tel que :
f (U, V) = f (V, U)
f (U, lV) = lf (U, V)
f (U, V + W) = f (U, V) + f (U, W)
f (U, U) > 0
U = 0
si
et f (U, U) = 0 si U = 0.
La quantité f (U, U) est appelée le carré de la norme de U, laquelle est notée U ou plus brièvement
U. Le plus souvent, on note le produit scalaire des deux vecteurs U et V simplement U · V.
I . 3 . — Base d’un espace vectoriel
On appelle base d’un espace vectoriel un système de n vecteurs de E, indépendants, permettant
d’exprimer linéairement tout vecteur de E. On a donc :
n
U=
xi ei
i=1
Les différents coefficients xi sont appelés composantes de U dans la base considérée. La base est
orthonormée si, quels que soient i et j différents, on a : ei · e i = 1 et ei · ej = 0.
II . — ESPACE AFFINE
II . 1 . — Définition
On appelle espace affine E un ensemble d’éléments, appelés points, tel qu’à tout couple ordonné
(AB) de deux points A et B (bipoint), on puisse faire correspondre un vecteur AB d’un espace vectoriel E ; si A, B, C désignent trois points de E, on doit avoir :
i) AB = −BA
ii) AC = AB + BC
iii) O étant un point quelconque de E et V un vecteur appartenant à E, il existe un point A et
un seul de E défini par OA = V.
II . 2 . — Espace métrique
Un espace métrique est un espace affine auquel on a associé un espace vectoriel euclidien. On peut
alors définir une norme pour tout vecteur associé aux points A et A : la norme est la distance de ces
points. En coordonnées cartésiennes, c’est-à-dire dans une base orthonormée (e x, e y , ez) de E, on a :
OA =
x i ei
OA =
i
xi ei
d’où
i
AA = OA − OA =
On en déduit la norme au carré de AA selon :
AA2 =
i
(xi − xi ) ei ·
j
(xj − xj ) ej =
i
(xi − xi )2
i
(x i − xi ) ei
3
Calcul vectoriel. Torseurs. Analyse dimensionnelle
puisque ei · ei = 1 et ei · ej = 0. Dans l’espace affine physique à trois dimensions, la norme a pour
expression :
AA = [(x − x)2 + (y − y)2 + (z − z)2]1/2
soit
AA = d s = (d x 2 + d y2 + d z 2 )1/2
si les deux points A et A sont infiniment voisins.
II . 3 . — Bases directe et inverse
Trois vecteurs U, V et W forment une base directe si un observateur placé sur OA = U, les
pieds en O et regardant vers OB = V, voit OC = W à sa gauche (Fig. 1.1a). Si OC est à sa droite,
la base est inverse.
Cette règle est appelée la règle du bonhomme d’Ampère ; elle est connue aussi sous le nom de règle
du tire-bouchon ou règle de Maxwell : pour une base directe, toute rotation qui amène U vers V est
accompagnée d’une translation suivant W.
L’intérêt de cette distinction entre les bases directe et inverse est lié à l’existence de deux grandes
catégories de grandeurs physiques : celles qui sont indépendantes de l’orientation de l’espace et celles
qui en dépendent. Les bases généralement utilisées en physique sont orthonormées et directes, comme
la base dite cartésienne {ex, ey , ez } (cf. chapitre 2) (Fig. 1.1b).
z
A
U
B
V
O
W
O
C
y
x
a) Repère direct
b) Repère orthonormé direct
F IG . 1.1.
III . — OPÉRATIONS SUR LES VECTEURS
c Dunod – Toute reproduction non autorisée est un délit
III . 1 . — Produit scalaire
a) Expression analytique
Soient U = i Ui ei et V = i Vi ei deux vecteurs de E exprimés dans une base orthonormée
directe. D’après les propriétés du produit scalaire, on a :
U·V =
Ui Vi
i
b) Représentation géométrique
Soient deux points A et B tels que OA = U et OB = V (Fig. 1.2). Dans le repère d’espace
Oxyz tel que OA est colinéaire à ex et OB contenu dans le plan Oxy, Ux = U et Vx = V cos u,
projection de V suivant la direction de U. Or U · V = Ux V x. Par conséquent :
U · V = UV cos u
4
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
Remarque : D’après cette relation, on voit que le produit scalaire est un nombre indépendant de la
base d’où son nom : c’est une grandeur intrinsèque.
y
B
V
θ
U
O
A
x
F IG . 1.2.
III . 2 . — Produit vectoriel
a) Définition
Considérant deux vecteurs U et V, dont les composantes respectives sont (U 1, U 2, U 3) et
(V1, V2, V3 ) dans une base orthonormée directe (e1, e 2, e3), on appelle produit vectoriel de U et V,
noté W = U × V, le vecteur suivant :
W = (U 2V3 − U 3V2 ) e1 + (U3 V 1 − U1V3 ) e2 + (U1V 2 − U 2V 1) e 3
Dans la pratique, on explicitera souvent U × V selon :
U1
V1
U 2V 3 − U3 V2
U 2 × V 2 = U 3V 1 − U1 V3
U3
V3
U 1V 2 − U2 V1
Notons que les différentes composantes s’obtiennent à partir de l’une d’entre elles par une simple permutation circulaire. En outre, l’écriture des vecteurs en colonnes permet de mémoriser facilement les
composantes du produit vectoriel ; ainsi, la première composante du vecteur W se calcule à partir des
deuxièmes et troisièmes composantes des vecteurs U et V selon la règle simple en croix suivante :
U2V 3 − U3 V2 .
La définition de W = U × V est telle que la base (U, V, W) a la même orientation que
(e 1, e 2, e3). Pour l’illustrer, plaçons-nous dans le cas particulier où U est dirigé suivant e 1 et V suivant e 2 (U1 > 0, U 2 = 0, U3 = 0, V1 = 0, V2 > 0, V3 = 0). On trouve :
W = U 1 V 2 e3
avec
U1 V2 > 0
Ainsi, lorsque U est orienté suivant e1 et V suivant e2 , U × V l’est suivant e3. Le sens du vecteur
obtenu dépend donc de la convention d’orientation. De tels vecteurs sont appelés vecteurs axiaux. On
les signale parfois par une flèche courbe, réservant la flèche droite aux vecteurs habituels dits polaires
car définis indépendamment de l’orientation de la base.
Remarque : Cette distinction entre vecteurs polaire et axial, qui dépasse largement le cadre de la mécanique, disparaît techniquement si les bases utilisées sont directes. Cependant, elle ne doit
pas être sous-estimée ; en électromagnétisme par exemple, elle joue un rôle capital : le
champ électrique E est un vecteur polaire alors que le champ magnétique B est un vecteur axial ; il en résulte que la nature profonde de ces deux champs et donc leurs propriétés
de symétrie, diffèrent fondamentalement (cf. Électromagnétisme).
5
Calcul vectoriel. Torseurs. Analyse dimensionnelle
b) Propriétés du produit vectoriel
i) D’après la définition précédente, W = 0 si U = 0, V = 0 ou si U et V sont parallèles. En
effet, dans ce dernier cas, on a U 1/V1 = U 2/V2 = U3 /V3 .
ii) À partir des composantes, il est facile de voir que U · W = 0 et V · W = 0. Donc W est
perpendiculaire à U et V.
iii) La norme de W est UV| sin(U, V)|. En effet :
W 2 = (U 2V 3 − U3 V 2 )2 + (U3 V1 − U1 V3)2 + (U 1V2 − U2V1) 2
= U 2V 2[1 − cos 2(U, V)] = U 2V 2 sin2(U, V)
c) Signification géométrique de U × V
La signification géométrique du produit vectoriel découle de ce qui précède. La norme de W,
qui vaut UV| sin(U, V)| s’identifie à l’aire du parallélogramme construit avec les vecteurs U et V
(Fig. 1.3). Donc, W est un vecteur normal à U et V, orienté de telle façon que la base (U, V, W) soit
directe, et de norme égale à l’aire du parallélogramme construit avec U et V.
W
W
U3
h
V
U2
U
F IG . 1.3.
U1
F IG . 1.4.
d) Règles de calcul
D’après la définition, on a :
U × V = −V × U
(lU) × (mV) = lmU × V
U × (V1 + · · · + V n) = U × V1 + · · · + U × Vn
U × lU = 0
c Dunod – Toute reproduction non autorisée est un délit
III . 3 . — Produit mixte de trois vecteurs dans un espace à trois dimensions
Par définition, le produit mixte de trois vecteurs U 1 , U2 , U 3 est la quantité scalaire :
(U1 × U2 ) · U3
a) Signification géométrique
Sur la figure 1.4, on peut voir que la valeur absolue du produit mixte s’identifie au volume limité
par le parallélépipède construit avec les trois vecteurs U1 , U2 , U 3 : la norme de W = U 1 × U2 est
l’aire de la base et la norme de U3 cos(W, U 3) est la hauteur h.
b) Permutation circulaire
Si, dans le produit mixte (U 1 × U 2 ) · U3, on effectue une permutation circulaire sur les indices 1, 2, 3, l’interprétation géométrique précédente permet d’établir que :
(U1 × U 2) · U 3 = (U2 × U3 ) · U1 = (U 3 × U1 ) · U2
6
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
III . 4 . — Double produit vectoriel
On appelle double produit vectoriel de trois vecteurs U 1 , U2 , U3 , le vecteur U1 × (U2 × U3 ).
D’après les propriétés du produit vectoriel, ce vecteur est normal au vecteur U 2 × U3. Il est donc
contenu dans le plan défini par U2 et U 3 et peut se mettre sous la forme d’une combinaison linéaire
de U2 et U3 . À partir des composantes dans une base orthonormée, on montre aisément que (cf. Exercices) :
U1 × (U 2 × U 3) = U2(U1 · U3 ) − U 3(U 1 · U2 )
Notons que dans le cas où deux des vecteurs sont égaux, par exemple U 1 = U 2, on a (Fig. 1.5) :
U 1 × (U1 × U3) = U 1(U 1 · U 3) − U 3(U12) = −U 21[U 3 − e 1 (e 1 · U3 )] = −U12 U3,⊥
U 3,⊥ étant le vecteur projection de U 3 dans le plan perpendiculaire à U 1. Ce résultat sera utilisé
pour établir l’expression de la force d’inertie d’entraînement dans un mouvement de rotation uniforme
(cf. chapitre 7).
U1
U3
e1
U3 ,?
F IG . 1.5.
Plus généralement, on retiendra que le double produit vectoriel de trois vecteurs, dont deux sont
identiques à e, de norme 1, permet d’obtenir le vecteur projection du troisième vecteur dans un plan
perpendiculaire à e. En effet :
e × (e × U) = −U + e(U · e) = −U ⊥
III . 5 . — Détermination des composantes d’un vecteur
Bien que purement technique, la détermination des composantes d’un vecteur est capitale pour
traduire les lois physiques de nature vectorielle. Dans la suite, pour la commodité des calculs, nous ne
considérerons que des bases orthonormées directes.
a) Technique de projection
Il arrive très souvent que l’on doive projeter un vecteur unitaire e situé dans un plan orienté. Il
convient alors de localiser d’abord l’axe polaire, c’est-à-dire l’axe qui, par une rotation de +p/2, se
confond avec le second axe du plan, puis d’évaluer algébriquement l’angle que fait le vecteur unitaire e
avec cet axe. Ainsi, dans le cas de la figure 1.6, il n’est pas inutile de rappeler que les composantes de e,
situé dans le plan Oxy, sont + cos u et + sin u dans tous les cas ; dans le premier, l’angle u est aigu
et positif, dans le second il est obtus et positif, dans le troisième, il est aigu et négatif.
y
y
y
e
e
µ
µ
Oz
x
Oz
F IG . 1.6.
x
Oz e
µ
x
7
Calcul vectoriel. Torseurs. Analyse dimensionnelle
Exemple : Soit à exprimer, en fonction de l’angle u sur la figure 1 . 7, les composantes du vecteur
CA, de norme r. Comme (Cx, CA) = (Cx, CI) + (CI, CA) = −p/2 + u, les composantes de CA
suivant les axes x et y sont respectivement :
r cos(−p/2 + u) = r sin u
et
r sin(−p/2 + u) = −r cos u
Pour retrouver ce résultat à l’aide de la figure, il suffit de remarquer que l’angle u est obtus et négatif.
En faisant u = −2p/3, on retrouve bien r sin u < 0 et −r cos u > 0.
y
z
A
C
r
g
T = Tz ez
θ
π/2
O
x
z
O
x
I
O
F IG . 1.7.
F IG . 1.8.
Remarques : (1) Lorsqu’un vecteur a un sens connu et déterminé, il est judicieux d’en tenir compte
directement dans la projection. Ainsi, pour le vecteur g, orienté suivant une verticale
descendante, on écrira, g = g étant sa norme, g = −g e z, plutôt que g = g z e z avec
gz = −g (Fig. 1.8). Dans le cas contraire, où un vecteur T, dirigé suivant Oz, est de
sens inconnu, on écrira T = Tz ez , Tz étant la mesure algébrique de T suivant l’axe.
(2) Le choix d’un trièdre orthonormé définit le sens positif d’une rotation dans un des
plans du trièdre.
b) Coordonnées cylindriques
Les coordonnées cylindriques sont évidemment adaptées pour décrire des systèmes physiques qui
ont une symétrie cylindrique.
Désignons par P la projection perpendiculaire du point A dans le plan Oxy et par H sa projection
parallèle à ce plan suivant l’axe Oz (Fig. 1.9). Par définition, les coordonnées cylindriques sont :
c Dunod – Toute reproduction non autorisée est un délit
r = OP
w = (Ox, OP)
et z = OH
z
z
H
A
ez
H
θ
eϕ
A
O
x
ϕ
ρ
P
r
eθ
O
eρ
ϕ
y
F IG . 1.9.
θ
x
P
F IG . 1.10.
On voit aisément, à l’aide de la figure, que :
x = r cos w
er
eϕ
et y = r sin w
y
8
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
La base orthonormée directe cylindrique est formée de trois vecteurs (er , ew , ez ) respectivement
définis par le déplacement vectoriel de A lorsque r, w, z varient séparément. On obtient er colinéaire
à OP, ew normal au plan w = Cte et ez colinéaire à Oz (cf. annexe 2).
c) Coordonnées sphériques
Les coordonnées sphériques sont, elles, naturelles pour décrire des systèmes physiques qui ont une
symétrie sphérique. Par définition, on appelle ainsi les coordonnées :
u = (Oz, OA)
r = OA
w = (Ox, OP)
On appelle u la colatitude et w l’azimut (Fig. 1.10) :
x = r sin u cos w
y = r sin u sin w
z = r cos u
La base orthonormée directe sphérique est formée des trois vecteurs (er, eu , ew ) définis respectivement par le déplacement vectoriel de A lorsque r, u et w varient séparément. On obtient e r colinéaire à OA, e u normal à OA dans le plan w = Cte et e w normal au plan w = Cte. Dans cette base,
OA = r er .
Remarque : On se reportera à l’annexe 2 pour connaître les expressions des surfaces élémentaires et
du volume élémentaire en coordonnées cylindriques et sphériques.
IV . — VECTEUR LIÉ ET SYSTÈME DE VECTEURS LIÉS
IV . 1 . — Définition d’un vecteur lié
On appelle vecteur lié le couple d’un vecteur V de E et d’un point A de E associé à E. On le
note (A, V). Par exemple, la force qui s’exerce sur un point matériel A peut être représentée par un
vecteur lié (A, F).
IV . 2 . — Moment en un point d’un vecteur lié
Par définition, le moment en un point O d’un vecteur lié (A, V) est le vecteur :
M O = OA × V
On voit aisément, à l’aide de la figure 1.11, que M O = |OA V sin u| = OH V. Établissons la relation
entre MO et le moment en un autre point O , MO :
Retenons donc :
MO = OA × V = (OO + O A) × V = OO × V + MO
MO = M O + OO × V
IV . 3 . — Moment d’un vecteur lié par rapport à un axe
Par définition, O étant un point d’un axe D de vecteur unitaire e D , le moment du vecteur lié
(A, V) par rapport à D est le produit scalaire (Fig. 1.12) :
MD = eD · M O = e D · (OA × V)
9
Calcul vectoriel. Torseurs. Analyse dimensionnelle
O
Δ
MO
MO
eΔ
O
A
V
θ
H
V
O
A
F IG . 1.11.
F IG . 1.12.
Cette notion a bien un sens, puisqu’elle ne dépend pas du point O choisi sur l’axe. Montrons-le en
introduisant un second point O de l’axe :
MD = eD · (OA × V) = e D · (OO + OA) × V = eD · (OO × V) + eD · (O A × V)
Comme eD et OO sont colinéaires, on a bien : eD · (OA × V) = eD · (O A × V).
IV . 4 . — Vecteur et moment d’un système de vecteurs liés
Soit un ensemble de vecteurs liés {(A i , V i)}. Le vecteur S et le vecteur moment M O, en un point
O arbitraire, de ce système de vecteurs liés, sont définis selon :
S=
Vi
i
et MO =
i
OA i × Vi
On les appelle les éléments de réduction du système de vecteurs liés. Exprimons, en O, le moment
résultant MO , en introduisant un autre point arbitraire O :
MO =
i
OAi × V i =
i
(OO + O A i) × Vi = M O + OO ×
Vi
i
Par conséquent :
MO = MO + OO × S
Notons que les moments, en un même point O, des deux vecteurs liés (A, V) et (A , V), tels que AA
soit colinéaire à V, sont égaux, puisque :
c Dunod – Toute reproduction non autorisée est un délit
OA × V = (OA + A A) × V = OA × V
Il en résulte que le nouveau système de vecteurs liés, obtenu en faisant glisser les vecteurs sur leurs
supports, a même vecteur et même moment que le système initial. Aussi certains auteurs introduisent-ils
le concept de vecteur glissant, sans grand intérêt.
IV . 5 . — Couple
On appelle couple tout système de vecteurs dont le vecteur résultant est nul et le moment résultant
non nul. Il en résulte que le moment d’un couple est indépendant du point où on le calcule :
MA = M B = M
L’origine du mot couple vient des propriétés du système formé par l’ensemble de deux vecteurs liés
(A1, F1) et (A 2, −F 1) dont la somme est un vecteur nul : S = F 1 + F2 = 0. Le moment est alors :
M A = AA1 × F 1 + AA2 × (−F1 ) = A2 A 1 × F1 = F1 d e z
d étant la distance entre les supports des deux vecteurs liés (Fig. 1.13).
10
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
d
−F 1
F1
A2
A1
F IG . 1.13.
IV . 6 . — Systèmes de vecteurs liés concourants
Considérons un système de vecteurs liés concourants et désignons par C le point de concours de
droites définies par les vecteurs liés. On a (Fig. 1.14) :
MC =
i
CA i × Vi = 0
MO = OC × S
d’où
en un point quelconque O .
Ainsi, le moment M O en un point O d’un système de vecteurs liés concourants en un point C
est le même que celui d’un vecteur lié (C, S) ou de tout autre vecteur lié obtenu en faisant glisser ce
dernier sur son support. Comme exemple, citons les forces de gravitation qu’exercent les éléments d’une
distribution de masse sur un point matériel extérieur.
S
Vi
C
Ai
An
V2
V1
A1
V1
A3
An
S
Vi
A2
A1
Vn
V3
A2
Vn
K
Ai
V2
F IG . 1.14.
F IG . 1.15.
IV . 7 . — Système de vecteurs liés parallèles
Désignons par e le vecteur unitaire commun à tous ces vecteurs liés (Fig. 1.15). Il vient
S = ( i Vi )e et, au point arbitraire O, MO = i OAi × Vi = ( i Vi OA i ) × e.
Posant
vient :
i
Vi OAi = S OK, K étant le barycentre des Ai affectés des mesures algébriques V i, il
M O = S OK × e
soit
M O = OK × S
Ainsi, le moment MO en un point O d’un système de vecteurs liés parallèles est le même que celui du
vecteur lié (K, S) ou de tout autre vecteur lié obtenu en faisant glisser ce dernier sur son support.
Exemple : Le vecteur lié associé à la force de pesanteur (C, M g), représentant l’action locale de la
Terre sur un système matériel de centre de masse C et de masse M, a même moment que l’ensemble
des vecteurs liés {Ai , m ig}. Comme il en est de même pour tous les vecteurs liés obtenus en faisant
glisser (C, Mg) sur son support, on dit que cette force est bien représentée par un vecteur glissant.
11
Calcul vectoriel. Torseurs. Analyse dimensionnelle
V . — CHAMP DE VECTEURS ANTISYMÉTRIQUE
V . 1 . — Champ de vecteurs
On appelle champ de vecteurs l’application qui fait correspondre, à tout point A de E, un vecteur
U d’un espace vectoriel E de même dimension que E.
Par exemple, le champ électrique et le champ magnétique produits en tout point de l’espace physique par des charges électriques sont des champs de vecteurs.
V . 2 . — Champ antisymétrique
a) Définition
Un champ de vecteurs M(A) est antisymétrique s’il existe un vecteur S tel que, quels que soient
les points A et B, on ait :
M(A) = M(B) + AB × S
Le vecteur S est le vecteur du champ antisymétrique.
Remarque : Compte tenu de la définition précédente, on voit que S et M(A) ont des caractères polaire
et axial différents.
b) Équiprojectivité
Si on multiplie scalairement les deux membres de l’équation précédente par AB, on a :
AB · M(A) = AB · [M(B) + AB × S] = AB · M(B)
puisque
AB · (AB × S) = 0
L’égalité AB · M(A) = AB · M(B) est la propriété d’équiprojectivité d’un champ antisymétrique
(Fig. 1.16) :
AB · M(A) = AB eAB · MA et AB · M(B) = AB e AB · MB
c Dunod – Toute reproduction non autorisée est un délit
eAB étant le vecteur unitaire défini par AB ; il en résulte que :
eAB · MA = eAB · MB
soit
AH = BK
M(B)
M(A)
A
H
B
K
F IG . 1.16.
Réciproquement, tout champ équiprojectif est un champ antisymétrique. Pour le montrer, introduisons un point arbitraire O et le champ M(O) en ce point. En retranchant AB · M(O) à AB · M(A), il
vient :
(OB − OA) · [M(A) − M(O)] = (OB − OA) · [M(B) − M(O)]
puisque AB · M(A) = AB · M(B), d’après l’équiprojectivité du champ.
12
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
Il en résulte, puisque OA · [M(A) − M(O)] = 0 et OB · [M(B) − M(O)] = 0 :
OB · [M(A) − M(O)] = −OA · [M(B) − M(O)]
Le champ W(A) = M(A) − M(O) satisfait donc à la propriété :
OB · W(A) = −OA · W(B)
d’où
OA · W(A) = −OA · W(A)
et donc
OA · W(A) = 0
De même, OB · W(B) = 0. Comme W(A) est perpendiculaire à OA, on peut l’écrire, S étant un
vecteur fixé :
W(A) = AO × S soit M(A) − M(O) = AO × S
VI . — TORSEURS
Comme nous le verrons ultérieurement (cf. chapitre 18), les théorèmes généraux de la dynamique
des systèmes matériels font apparaître deux ensembles de vecteurs liés : celui des quantités de mouvement et celui des forces. Cependant, ces ensembles n’interviennent dans ces théorèmes que par leurs
éléments de réduction, d’où une impossibilité de distinguer les effets sur le mouvement de deux systèmes de vecteurs liés qui admettent les mêmes éléments de réduction : seuls importent, relativement
à ces théorèmes, le champ antisymétrique et le vecteur associé à ces ensembles de vecteurs. On comprend, dans ce contexte, l’intérêt de mettre en avant les éléments de réduction d’un ensemble de vecteurs liés et par conséquent le concept de torseur construit à partir de ces seuls éléments de réduction.
Historiquement, c’est l’ingénieur britannique R. Ball qui l’a introduit au milieu du XXe siècle, et le mathématicien français P. Appel qui a contribué à son usage dans l’enseignement français de la mécanique.
VI . 1 . — Définition
On appelle torseur [T ] l’ensemble d’un champ antisymétrique M(A) et de son vecteur S ; M(A)
et S sont appelés respectivement moment et vecteur du torseur [T ].
M(A) = M(B) + AB × S
Remarque : Cette définition dépasse le cadre initialement fixé par les théorèmes généraux, puisque,
même en l’absence de systèmes de vecteurs liés, on peut associer un torseur à un champ
de vecteurs antisymétrique. Par exemple en cinématique du solide, le torseur cinématique
n’est pas construit à partir d’un ensemble de vecteurs liés, mais à partir du seul champ
antisymétrique des vitesses (cf. chapitre 16) :
v(A) = v(B) + AB × V
pour lequel le vecteur V, vitesse angulaire de rotation, n’est identifié à aucune somme de
vecteurs élémentaires.
VI . 2 . — Propriétés des torseurs
a) Égalité
Deux torseurs [T 1 ] et [T2] sont égaux si et seulement si leurs éléments de réduction sont égaux :
S 1 = S2
et M1 (A) = M2 (A)
Calcul vectoriel. Torseurs. Analyse dimensionnelle
13
b) Somme
La somme de deux torseurs [T 1] et [T2] est le torseur [T ] dont les éléments de réduction sont la
somme des éléments de réduction de chacun des deux torseurs :
S = S1 + S2
et M(A) = M1(A) + M2 (A)
c) Multiplication par un scalaire
Le torseur l[T ], l étant un scalaire, admet lS comme vecteur et lM(A) comme moment.
d) Torseur nul
Un torseur [T ] est nul si ses éléments de réduction sont nuls : S = 0 et M(A) = 0.
e) Produit scalaire de deux torseurs
On appelle produit scalaire de deux torseurs [F] = {F, M(A)} et [v] = {V, v(A)} la quantité
suivante :
[F][v] = F · v(A) + M(A) · V
Cette définition est suggérée par l’expression de la puissance qu’exerce un système de forces sur un
solide en mouvement.
f) Invariants d’un torseur
D’après la relation de définition d’un torseur, on établit aisément, en projetant le vecteur M sur S
et sur AB, que :
i) S · M(A) = S · M(B)
ii) AB · M(A) = AB · M(B) (équiprojectivité).
iii) Le produit scalaire de deux torseurs est aussi un invariant.
Montrons que [F][v] est indépendant du point A en lequel on exprime les moments. Comme :
c Dunod – Toute reproduction non autorisée est un délit
on a :
v(A) = v(B) + AB × V et M(A) = M(B) + AB × F
F · v(A) + M(A) · V = F · [v(B) + AB × V] + [M(B) + AB × F] · V = F · v(B) + M(B) · V
g) Axe central d’un torseur
L’ensemble des points H de l’espace en lesquels le moment d’un champ antisymétrique M(A) est
parallèle à son vecteur S est une droite appelée axe central. On établit ce résultat à partir de l’équation
(cf. Exercices) :
M(H) = lS d’où lS = M(A) + HA × S
Il est facile de montrer qu’en des points de l’axe central, la norme du champ antisymétrique est minimale : en effet, si l’on désigne par u l’angle que font entre eux les vecteurs S et M(A), on a :
S · M(A) = S M(A) cos u
La norme S étant invariante, la norme de M(A) est minimale si cos u est maximal, c’est-à-dire aux
points H de l’axe central pour lesquels u = 0 puisque S et M(A) sont parallèles.
14
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
VI . 3 . — Torseur associé à un ensemble de vecteurs liés
Comme le moment d’un ensemble de vecteurs liés {(A i , V i )} a la forme d’un champ antisymétrique, on lui associe le torseur caractérisé par les éléments de réduction :
S=
Vi
(vecteur)
et
M(O) =
i
i
OA i × Vi
(moment)
a) Équivalence torsorielle de deux systèmes de vecteurs liés
Deux systèmes de vecteurs liés sont torsoriellement équivalents si leurs torseurs associés sont
égaux.
Cette équivalence n’a de sens que relativement à la théorie des torseurs, ce qui traduit une équivalence physique précise et limitée. Par exemple, les torseurs associés aux systèmes de vecteurs représentés sur la figure 1.17 : {(A1 , F), (A2, −F)} et {(A 1 , −F), (A2 , F)} sont tous les deux nuls. Ces deux
systèmes de vecteurs liés sont donc torsoriellement équivalents. Sur un corps indéformable tel qu’un solide idéal, les effets sur le mouvement sont identiques. En revanche, sur un corps déformable tel qu’un
ressort, bien que le mouvement d’ensemble du ressort soit le même (centre de masse immobile et absence de rotation), les effets sont différents : dans le premier cas le ressort est dilaté, alors que dans le
second il est comprimé.
−F A 2
A2 F
A1 F
− F A1
F IG . 1.17.
b) Systèmes de vecteurs équivalents à un ensemble de vecteurs liés concourants ou parallèles
Un système de vecteurs liés concourants en C et de somme S est torsoriellement équivalent au
vecteur lié (C, S).
De même, un système de vecteurs liés parallèles et de somme S est torsoriellement équivalent au
vecteur lié (K, S), K étant le barycentre associé.
VI . 4 . — Système de trois vecteurs liés de torseur nul
Cherchons les conditions dans lesquelles le torseur associé à un système de trois vecteurs liés
(A1, V 1) (A 2 , V2 ) et (A3, V 3 ) est nul. Ce cas est intéressant en statique (cf. chapitre 23) lorsqu’un
solide, soumis à trois forces, est immobile.
Le torseur étant nul, la somme des moments des trois vecteurs liés par rapport à toute droite D,
s’appuyant sur les supports de deux d’entre eux, doit être nulle (Fig. 1.18). Par conséquent, le moment
par rapport à D du troisième vecteur lié est nul. Il en résulte que le support de ce vecteur lié passe par
D et, donc que les trois vecteurs liés doivent être dans le même plan défini par les points A1 , A2 et A3.
15
Calcul vectoriel. Torseurs. Analyse dimensionnelle
A1
V1
D
A2
C
V2
V3
A3
F IG . 1.18.
En outre, les trois vecteurs liés sont concourants puisque le moment d’un vecteur lié au point
d’intersection des supports des deux autres doit être nul. Finalement, les conditions dans lesquelles le
torseur associé à trois vecteurs liés est nul sont les suivantes :
i) les trois vecteurs liés sont coplanaires,
ii) ils sont concourants,
iii) ils satisfont à l’équation V 1 + V2 + V3 = 0.
Remarque : Dans le cas singulier banal où les trois vecteurs liés sont parallèles, le point d’intersection
est rejeté à l’infini.
VII . — ANALYSE DIMENSIONNELLE
En physique et donc en mécanique, on ne se limite pas à l’observation et à l’analyse qualitative des
phénomènes qui nous entourent. On étudie aussi la nature en utilisant des lois quantitatives empiriques
(issues de l’expérience) entre des grandeurs physiques. Ces lois sont ensuite réunies en un petit nombre
de lois fondamentales, supposées universelles tant que les faits n’en montrent pas la limite. Un tel
ensemble diminue donc le nombre de lois : on réalise ainsi une synthèse. On peut ainsi ramener la
physique à la quête de l’universalité à travers la réalisation de synthèses. Ce mode de pensée diffère
fondamentalement du relativisme (philosophique) où on multiplie les lois et particularise les faits.
VII . 1 . — Unités des grandeurs physiques
c Dunod – Toute reproduction non autorisée est un délit
a) Définition
La mesure d’une grandeur physique X est la comparaison de X à une autre grandeur, de même
nature, X0 , choisie arbitrairement comme unité ; précisément, on effectue le rapport :
mX =
X
X0
Le résultat de la mesure est un nombre mX , valeur de X , suivi de son unité.
b) Unités de base du Système International et unités dérivées
Dans la suite, on utilisera essentiellement trois unités du Système International (SI), la seconde
pour les durées, le mètre pour les longueurs et le kilogramme pour les masses.
Toutes les autres unités, qui découlent de ces unités de base à partir de relations de définition, sont
des unités dérivées. Par exemple, l’unité de vitesse m.s −1 est une unité dérivée, car, par définition, la
vitesse d’un point est le rapport entre la longueur d’un trajet et la durée de parcours de ce trajet.
16
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
c) Incertitudes expérimentales
En physique, toute mesure d’une grandeur X doit s’accompagner de son incertitude expérimentale
DX , c’est-à-dire qu’il faut donner l’intervalle de valeurs de X , autour de la valeur mesurée Xm , qui est
censé encadrer la valeur vraie Xv de X :
X = X m ± DX
avec
DX > 0
ce qui signifie que Xm −DX Xv Xm +DX . Notons que cet intervalle n’est jamais nul puisqu’aucune
grandeur physique ne peut être mesurée avec certitude.
Une estimation raisonnable de l’incertitude expérimentale est donnée par l’instrument utilisé pour
la mesure. Ainsi, une règle graduée en millimètres donne, sur la mesure d’une longueur, une incertitude de l’ordre de 1 mm . Par exemple, pour mesurer la longueur l d’un pendule constitué d’un fil
inextensible et d’une masselotte sphérique, on doit relever deux positions, chacune ayant une incertitude de l’ordre de celle de la règle : celle du point de fixation et celle du point d’attache de la masselotte.
On trouve, par exemple :
l = (0, 492 ± 0, 002) m
ce qui signifie que la longueur du pendule est comprise entre 0, 490 m et 0, 494 m .
De même, un chronomètre permettant d’accéder au dixième de seconde donne, pour la mesure
d’une durée, des mesures incertaines en ordre de grandeur à 0,1 s . Par exemple, pour la période T 0 du
pendule précédent, on mesure dans la pratique dix périodes afin de réduire les incertitudes sur la mesure
d’une seule période ; en outre l’incertitude de 0, 1 s se retrouve lors du déclenchement du chronomètre
et lors de son arrêt. Par conséquent :
10 T0 = (14, 1 ± 0, 2) s d’où T 0 = (1, 41 ± 0, 02) s
ce qui signifie que la période du pendule est comprise entre 1, 39 s et 1, 43 s .
VII . 2 . — Dimension des grandeurs physiques
La dimension physique est la propriété que l’on peut associer à un ensemble de grandeurs physique
de même nature. Par exemple, la taille d’une règle et celle d’un être vivant possèdent la dimension d’une
longueur. On dit que ces grandeurs ont même dimension, ou encore qu’elles sont homogènes.
a) Absurdité dimensionnelle
En physique, il est absurde d’écrire une relation d’égalité entre deux grandeurs de dimensions
physiques différentes. Par exemple, le nombre qui exprime, au cours de l’évolution d’un système, un
instant t , et celui qui représente sa position x le long d’un axe sont mathématiquement deux réels dont
il est physiquement absurde de concevoir l’égalité. En effet, le premier a la dimension physique d’une
durée alors que le second est homogène à une longueur.
Les lois physiques prennent généralement la forme de relations entre plusieurs grandeurs de dimensions physiques différentes. Pour éviter toute absurdité, il est nécessaire que les deux membres de
l’équation qui exprime une relation soient, eux, de même dimension physique. Ainsi, on peut écrire une
loi d’évolution de la position x de la façon suivante :
x = at + b
à condition que a ait la dimension d’une longueur par unité de temps et b celle d’une longueur.
Calcul vectoriel. Torseurs. Analyse dimensionnelle
17
b) Absurdité vectorielle
On peut rencontrer un deuxième type d’absurdité physique si on relie des vecteurs de natures
différentes : certains, comme les vecteurs position r , vitesse v , accélération a et force F , sont définis
indépendamment de toute convention d’orientation de l’espace, contrairement à d’autres, tel que le
champ magnétique B qui est indissociablement lié à une telle convention. Les premiers sont appelés
vecteurs polaires alors que les seconds sont qualifiés d’axiaux. La convention d’orientation est la règle
du bonhomme d’Ampère ou du tire-bouchon de Maxwell : le sens de progression d’un tire-bouchon qui
tourne dans le sens trigonométrique est positif.
Dans ce contexte, il est absurde en physique d’égaler un vecteur polaire et un vecteur axial. Ainsi,
l’égalité entre une vitesse et une vitesse angulaire de rotation est physiquement doublement absurde :
d’une part la dimension physique n’est pas la même, d’autre part la nature de ces vecteurs est différente ;
en revanche la relation donnant le champ des vitesses d’un solide :
v(A) = v(B) + AB × V
est correcte à la fois dimensionnellement et du point de vue strictement vectoriel, car V est certes un
vecteur axial mais la multiplication vectorielle prend en compte cette spécificité.
c) Absurdité structurelle
Un troisième type d’absurdité physique peut se manifester en manipulant des grandeurs physiques
de structures mathématiques différentes : égaler un nombre et un vecteur, ou encore une différentielle,
qui peut être infiniment petite, et une quantité finie, n’a pas de sens.
VII . 3 . — Équations aux dimensions
On appelle équation aux dimensions une équation qui relie la dimension d’une grandeur à celles
des grandeurs de base.
a) Exemple de la force de gravitation
c Dunod – Toute reproduction non autorisée est un délit
La force de gravitation, attractive, entre deux corpuscules A 1 et A2, distants de r , a pour expression :
m m
A 2A1
r
r1 − r2
OA 1 − OA 2
= =
=
F2→1 = −G 1 2 2 e r avec
er =
r
A 2A 1
r
r
r
Cette loi fait apparaître les masses graves, m 1 et m 2 , lesquelles traduisent la capacité de ces corps à
s’attirer mutuellement. Notons la présence de la constante de gravitation, G , ou constante de Newton,
qui vaut en unité SI environ 6, 67 × 10 −11 .
Déterminons la dimension physique de G . Il vient, en désignant par des crochets la dimension de
toute grandeur :
[F] = [G][M] 2[L]−2 d’où [G] = [F][L] 2[M]−2
[M] et [L] représentant respectivement les dimensions de masse et de longueur. Comme, d’après la loi
fondamentale de la dynamique ou deuxième loi de Newton (cf. chapitre 4), [F] = [M ][L][T ] −2, on en
déduit, T désignant le temps :
[G] = [M][L][T ] −2[L] 2[M]−2 = [L]3 [M]−1 [T ]−2
Ainsi, G est homogène au produit d’une longueur au cube par l’inverse d’une masse et par l’inverse du
carré d’un temps. Par conséquent, G ≈ 6, 67 × 10−11 m 3.kg−1.s −2 .
18
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
VII . 4 . — Analyse dimensionnelle
L’analyse dimensionnelle est une méthode qualitative qui permet d’identifier les paramètres pertinents d’un phénomène physique et d’en déduire la dépendance d’une grandeur en fonction de ces paramètres. Évidemment, les facteurs numériques, sans dimension par définition, restent inaccessibles avec
cette méthode ; leur détermination relève d’une étude quantitative.
Exemples
1) Montrons, à l’aide de l’analyse dimensionnelle, que la période des petites oscillations d’un
pendule simple est proportionnelle à (l/g)1/2 , l étant la longueur du pendule et g l’intensité du champ
de pesanteur terrestre. A priori, l et g constituent, avec la masse m de la bille, les paramètres pertinents
du système. La période T peut donc s’écrire dimensionnellement :
[T] = [L] a[g]b[M]g
avec [g] = [L][T ] −2
puisque g est une accélération, celle due à la pesanteur. Il en résulte :
[T] = [L] a+b [T ]−2b [M]g
soit
g=0
b = −a = −
1
2
On en déduit T = Cte × (l/g)1/2 . On retrouve ainsi, par la seule voie de l’analyse dimensionnelle,
l’absence de la masse dans l’expression de la période d’un tel pendule, absence que l’on doit attribuer
physiquement à l’égalité de la masse grave m∗ et de la masse inerte m . L’étude quantitative approfondie
montre que cette constante vaut 2p .
2) Vitesse d’évasion v d’un objet dans l’environnement terrestre
La vitesse d’évasion ou de libération d’un objet dans l’environnement terrestre est la vitesse que
l’on doit lui communiquer pour que son énergie mécanique soit nulle (cf. chapitre 12). Les paramètres
pertinents sont la masse MT de la Terre, la distance r de l’objet au centre de la Terre et la constante de
Newton G . Par conséquent, on a :
[v] = [G]a[M]b [L]g
avec
[G] = [L] 3 [M]−1 [T ]−2
Il en résulte :
[v] = [L] 3a [M]−a[T ] −2a [M]b[L] g = [L]3a+g[M] b−a[T ] −2a avec
Ainsi, on obtient : 3a + g = 1
b − a = 0 et
a = b = −g =
1
2
[v] = [L][T ]−1
2a = 1 d’où :
et v =
GMT
r
1/2
En réalité, la vitesse obtenue dans cet exemple
est la vitesse de satellisation et non celle d’évasion, que
√
l’on obtient en introduisant le facteur 2 . Cet exemple illustre bien la différence entre une analyse
dimensionnelle, par définition qualitative, et une analyse quantitative.
VII . 5 . — Similitude en physique
Il est souvent instructif, avant de tenter de résoudre les équations fournies par les lois de la physique,
d’extraire de ces lois des propriétés générales, issues de la seule analyse dimensionnelle.
Calcul vectoriel. Torseurs. Analyse dimensionnelle
19
a) Méthode des similitudes
La méthode des similitudes consiste à multiplier chacune des grandeurs physiques qui interviennent
dans une loi (longueur, temps, masse, etc.) par un facteur de telle sorte que la loi garde sa forme initiale.
Cette technique permet d’une part d’établir des propriétés universelles, et, d’autre part, de diminuer
considérablement les coûts d’expérimentation en travaillant sur des systèmes réduits, ou maquettes. On
l’utilise largement en mécanique des fluides, en raison notamment de la difficulté de résolution des
équations différentielles, mais aussi pour étudier expérimentalement, en laboratoire, des écoulements
sur des reproductions réduites de la réalité (cf. annexe 5).
b) Lois d’échelle
Si toutes les dimensions géométriques d’un système sont multipliées par un facteur déterminé l ,
on obtient un nouveau système homothétique du précédent. Le volume initial est donc multiplié par l 3 ,
et donc son poids si la masse volumique est inchangée.
Pour que le système homothétique ait le même comportement que le système initial, il importe que
les autres forces, par exemple les forces intérieures, soient multipliées par l 3 elles-aussi.
En réalité, il n’en est rien comme le montre l’analyse des conséquences d’une homothétie sur les
systèmes déformables que sont les êtres vivants. En effet, on constate que les grands animaux sont
généralement plus trapus que les petits. On explique cela par la nécessité pour les grands animaux de
compenser leur poids important par une musculature adaptée.
CONCLUSION
Retenons, au-delà des définitions et des opérations simples sur les vecteurs, les points essentiels
suivants.
(1) Le calcul technique des composantes d’un vecteur, notamment dans les systèmes de coordonnées cartésiennes, cylindriques et sphériques, doit être mené avec soin.
(2) Un vecteur lié (A, V) est l’ensemble d’un point A et d’un vecteur V.
c Dunod – Toute reproduction non autorisée est un délit
(3) La relation caractéristique d’un champ de vecteurs antisymétrique est :
M(A) = M(B) + AB × S
(4) Un torseur est l’ensemble de M(A) et de son vecteur S.
(5) Les ensembles de vecteurs liés concourants ou parallèles sont torsoriellement équivalents à des
vecteurs liés simples : le premier ensemble est équivalent à un vecteur dont le support passe par le point
de concours, le second est équivalent à un vecteur parallèle à tous les vecteurs liés et tel que le support
passe par le barycentre des points d’application.
(6) Enfin, l’analyse dimensionnelle, qui consiste à combiner plusieurs paramètres physiques pertinents d’un système pour en dégager une grandeur caractéristique et l’estimer, constitue une méthode
d’analyse qualitative préalable efficace. Elle joue un rôle essentiel chaque fois que les lois quantitatives sont difficilement exploitables ; c’est le cas notamment en mécanique des fluides (cf. chapitres 30
et 31).
20
1. Calcul vectoriel. Torseurs. Analyse dimensionnelle
EXERCICES ET PROBLÈMES
P1– 1. Équation d’un plan
On considère un vecteur a de composantes (2, 1, −2) dans la base (e x , ey , e z) et un point B de
coordonnées (1, 2, 3).
1. Trouver les cosinus directeurs de a.
2. Quelle est l’équation d’un plan passant par B et perpendiculaire à a ? En déduire la distance
de O au plan.
P1– 2. Moment en un point et moment par rapport à un axe
1. Calculer le moment du vecteur lié (A, a) au point B. On donne, dans la base (e x, ey , e z) :
OA = (0, 5, 2)
a = (−1, 2, 0)
et OB = (3, 1, 4)
2. Calculer le moment de (A, a) par rapport à l’axe D passant par B et parallèle au vecteur c de
composantes (−1, 2, 2).
P1– 3. Volume d’un parallélépipède
Calculer le volume du parallélépipède clinorhombique (prisme oblique à base losange) défini par
les trois vecteurs suivants : a = 3 ex + 2 ey, b = 3 ex − 2 e y , c = 2 ex + 7 e z l’unité étant le nanomètre.
P1– 4. Double produit vectoriel
Établir la formule du double produit vectoriel entre les trois vecteurs U, V, W :
U × (V × W) = V(U · W) − W(U · V)
On explicitera la première composante en coordonnées cartésiennes et on fera une permutation circulaire. Étudier le cas où U = V.
P1– 5. Vecteurs réciproques
On définit les vecteurs réciproques a ∗ , b∗, c∗ , associés aux trois vecteurs a, b, c, par les
relations :
a∗ = 2p
b×c
b ∗ = 2p
c×a
c ∗ = 2p
a×b
1. Effectuer les produits scalaires du type a · a ∗ et a · b∗ .
2. Établir la relation entre
et
∗
= a ∗ · (b∗ × c∗ ).
où
= a·b×c
21
Calcul vectoriel. Torseurs. Analyse dimensionnelle
P1– 6. Axe central d’un torseur
On considère, au point A de coordonnées cartésiennes (1, 3, 1), le torseur suivant dont les éléments de réduction sont : S = 2 ez et M(A) = 4 ex + 7 ey + 2 e z.
1. Trouver l’équation de l’axe central du torseur.
2. Quel est le vecteur moment en tout point H de l’axe central ?
P1– 7. Torseur associé à trois vecteurs liés
On considère, dans un repère d’espace Oxyz, les trois vecteurs : V 1(0, 0, 1), V2 (−1, 2, 0) et
V3(a, b, g) , et les trois points A 1 (1, 0, 0), A2 (0, 1, 0) et A 3(0, 0, 1). On construit les vecteurs liés
(Ai , Vi ).
Déterminer les nombres réels a, b, g, tels que le système de ces trois vecteurs liés soit torsoriellement équivalent à un couple dont on calculera le moment.
P1– 8. Mur énergétique de Planck
En physique, il existe trois constantes fondamentales : la constante de Newton G , la constante
d’Einstein c , ou vitesse de lumière dans le vide, et la constante de Planck barrée , homogène au
produit d’une énergie par une durée. Ces trois constantes valent, en unités SI, respectivement :
G ≈ 6, 67 × 10−11 m3.kg−1 .s−2
c ≈ 2, 997 × 10 8 m.s −1
et ≈ 1, 054 × 10−34 kg.m2.s −1
c Dunod – Toute reproduction non autorisée est un délit
À l’aide d’une analyse dimensionnelle, combinant G , c et , trouver la hauteur du mur énergétique
de Planck mPc 2 en gigaélectronvolt ( 1 GeV ≈ 1, 6 × 10−10 J ).
2
Cinématique du point mobile.
Vitesse de rotation d’un repère
La cinématique est l’étude des mouvements des corps indépendamment des causes qui les produisent. Elle s’appuie uniquement sur les notions d’espace et de temps que tout observateur possède intuitivement. Pour étudier le mouvement des corps, l’observateur doit rendre ces notions objectives en
utilisant d’autres corps pris comme repères d’espace et de temps.
Il convient d’abord de préciser le cadre spatiotemporel de la cinématique dite galiléenne ou newtonienne, en hommage aux apports décisifs du physicien italien G. Galilée en 1638 et du physicien anglais
I. Newton en 1687.
Bien plus tard, en 1905, A. Einstein montra le caractère approché de cette cinématique (cf. Relativité et invariance). Cependant, pour la presque totalité des problèmes de mécanique qui se posent
en physique macroscopique, la cinématique newtonienne constitue une excellente approximation qu’il
convient de développer.
I . — CADRE SPATIOTEMPOREL DE LA CINÉMATIQUE GALILÉENNE
I . 1 . — Notion d’événement
Les phénomènes physiques peuvent être considérés comme des ensembles d’événements, c’està-dire de phénomènes élémentaires que l’on caractérise en associant, à l’espace ambiant et au temps,
respectivement, deux espaces métriques, l’un à 3 dimensions et l’autre à 1 dimension.
Le physicien rend objectif ce double repérage en introduisant la mesure de ces grandeurs, ce qui
revient à choisir une origine et une norme dans chacun des deux espaces précédents.
I . 2 . — Mesure du temps
La mesure du temps suppose implicitement une orientation, du passé vers le futur ; cette orientation
s’appuie sur l’irréversibilité de l’évolution de tous les phénomènes physiques réels, c’est-à-dire sur le
deuxième principe de la thermodynamique (cf. Thermodynamique).
Pour être complet, la mesure exige le choix d’une origine ; celle-ci sera prise conventionnellement
à un instant donné de l’évolution du phénomène étudié. Il est naturel d’adopter comme instant initial
l’instant pour lequel l’état du système est connu ; les instants ultérieurs correspondent alors à l’évolution
du système vers le futur où le mouvement est encore inconnu.
Cinématique du point mobile. Vitesse de rotation d’un repère
23
On mesure le temps à l’aide d’horloges qui sont des systèmes physiques dont on se donne la loi
d’évolution en fonction du temps. On définit ainsi une échelle de temps qui dépend de la nature de la loi
adoptée ; aussi existe-t-il plusieurs échelles de temps.
a) L’échelle de temps universel (T.U.)
Admettant l’uniformité de la vitesse de rotation de la Terre autour de son axe des pôles, l’angle de
rotation permet de mesurer le temps. Le temps ainsi défini est appelé le temps universel (T.U.). On tient
compte des irrégularités de cette rotation en apportant de légères corrections, ce qui donne T.U1.
b) L’échelle de temps des éphémérides (T.E.)
Le paramètre d’évolution est ici la position du centre de la Terre sur son orbite autour du Soleil. Le
temps ainsi défini est le temps des éphémérides (T.E.).
c) L’échelle de temps atomique internationale (T.A.I.)
Là, on compte le nombre de périodes d’un système physique qui oscille tel un pendule mécanique,
un circuit électrique, un système quantique à deux états. Dans ce dernier cas, on peut mesurer des durées
très courtes avec une précision remarquable. Le temps est alors appelé temps atomique international
(T.A.I).
L’unité de durée, dans le système international (SI), est la seconde, c’est-à-dire la durée de
9 192 631 770 périodes de radiation correspondant à la transition entre les deux niveaux hyperfins
de l’état fondamental de l’atome de césium 133 (cf. Quantique).
d) L’échelle de temps géologique
Pour la mesure de durées très longues, on utilise la loi de désintégration de corps radioactifs, comme
le carbone 14, isotope du carbone naturel 12.
e) L’échelle de temps légal
En raison, notamment, des besoins de la navigation maritime, l’échelle de temps légal en France
est un compromis entre l’échelle de temps universel (T.U.) et l’échelle de temps atomique (T.A.I.). On
l’appelle échelle de temps universel coordonné (T.U.C.).
c Dunod – Toute reproduction non autorisée est un délit
Les horloges publiques diffusent, en France, T.U.C. + 1 h en hiver et T.U.C + 2 h en été.
Remarque : Il convient de ne pas confondre l’instant initial, choisi conventionnellement pour une expérience déterminée de cinématique, et un hypothétique instant initial de l’Univers. Le
premier a un sens physique précis puisque des événements réels se produisent dans le présent, alors que le second est de nature purement spéculative. Retenons, après l’analyse du
temps et de sa mesure faite par Einstein dans la théorie de la relativité (cf. Relativité et invariance) que le temps est un concept physique qui n’a de sens que relativement à des
phénomènes physiques.
I . 3 . — Repère d’espace
On appelle repère d’espace R un ensemble de points dont les distances mutuelles sont invariables
au cours du temps ; un tel ensemble est aussi appelé solide de référence.
Le repérage spatial de la position à chaque instant d’un point quelconque A de l’espace exige
d’abord que l’on se donne conventionnellement une origine O à partir de laquelle les longueurs sont
comptées.
Dans l’espace physique à trois dimensions, cette position est déterminée par le vecteur OA.
24
2. Cinématique du point mobile. Vitesse de rotation d’un repère
Il est souvent commode d’expliciter ce vecteur dans une base généralement orthonormée, formée
de trois vecteurs unitaires ex , ey , ez fixes par rapport à R. On écrira par exemple :
OA = x ex + y e y + z ez
x, y, z étant les composantes cartésiennes du vecteur OA ou les coordonnées du point A dans la
base ex , ey, ez .
Notons que l’on peut associer à un repère d’espace plusieurs bases différentes mais fixes les unes
par rapport aux autres.
Si la base est directe le repère est direct, si elle est inverse le repère est inverse. Rappelons que
cette orientation de l’espace est liée à l’existence de deux catégories de grandeurs physiques : celles qui
dépendent de l’orientation de l’espace et celles qui n’en dépendent pas. Dans ce contexte, l’opération
produit vectoriel de deux vecteurs exige pour sa définition une orientation préalable de l’espace, laquelle
s’appuie sur la règle physique du bonhomme d’Ampère ou du tire-bouchon de Maxwell (cf. chapitre 1).
En général, on munit le repère d’une base directe orthonormée.
Dans la suite, on écrira brièvement R = Oxyz pour désigner le repère R, muni de son origine O
et de la base directe formée des trois vecteurs unitaires e x , ey et ez fixes par rapport R.
L’unité SI de longueur est le mètre, c’est-à-dire, depuis la conférence internationale des poids et
mesures de 1983, la distance parcourue par la lumière dans le vide en une durée égale à 1/c seconde,
la vitesse c ayant la valeur exacte suivante :
c = 2, 997 924 58 × 10 8 m . s −1
I . 4 . — Référentiel
On peut associer à un repère d’espace R un temps unique en synchronisant les horloges de ce
repère. La synchronisation se fait en deux étapes (Fig. 2.1) :
z
H2
H1
O
x
A1
A2
y
F IG . 2.1.
i) Contrôle de la même marche
On considère deux horloges H 1 et H 2 situées respectivement aux points fixes A 1 et A 2. À l’instant t1 de H 1 , A1 envoie un signal vers A 2 qui le reçoit au temps t 2 de H2 . À l’instant t1 + T de
H1, A 1 envoie un nouveau signal que A 2 doit recevoir au temps t2 + T.
ii) Contrôle de la même origine
À l’instant t1 de H1 , A1 envoie un signal vers A 2 qui le réfléchit vers A 1. Ce dernier le reçoit
au temps t1 + T. L’origine des deux horloges est la même si A2 a reçu le signal au temps t 1 + T/2.
Grâce à ce signal, le plus souvent électromagnétique en raison de sa grande vitesse de propagation
dans le vide, on peut synchroniser toutes les horloges d’un repère d’espace. Ce temps unique, donné par
toutes ces horloges, est le temps du repère. On définit alors la simultanéité :
25
Cinématique du point mobile. Vitesse de rotation d’un repère
Deux événements sont simultanés si les horloges, préalablement synchronisées, placées aux points
où se produisent ces phénomènes, donnent la même indication.
L’ensemble d’un repère d’espace et d’un repère de temps forme un référentiel, c’est-à-dire une référence spatiale et une référence temporelle, toutes deux indispensables dans l’étude de tout mouvement.
I . 5 . — Durée et longueur de Planck
Concernant le temps et l’espace, une question se pose : existe-t-il une durée et une longueur minimales en dessous desquelles toute durée ou toute longueur n’auraient pas de signification physique. On
admet actuellement que la réponse est oui, et que ces valeurs minimales sont celles introduites par M.
Planck en 1914. Ces grandeurs sont construites à partir des trois constantes fondamentales de la physique, la constante de gravitation G , la constante d’Einstein c ou vitesse limite et la constante de Planck
h , précisément = h/(2p) (prononcer h barre).
a) Analyse dimensionnelle
Pour déterminer ces constantes, on s’appuie sur une analyse dimensionnelle, qui est une méthode
qualitative d’étude permettant d’identifier les paramètres pertinents d’un phénomène physique et d’en
déduire la dépendance d’une grandeur en fonction de ces paramètres. Les facteurs numériques, sans dimension par définition, restent évidemment inaccessibles, leur détermination relevant de la seule analyse
quantitative.
Montrons, à l’aide de l’analyse dimensionnelle, que la période des petites oscillations d’un pendule
simple est proportionnelle à (l/g)1/2 , l étant la longueur du pendule et g l’intensité du champ de
pesanteur terrestre. A priori, l et g constituent, avec la masse m de la bille, les paramètres pertinents
du système. La période T peut donc s’écrire dimensionnellement :
[T] = [L] a[g]b[M]g
avec [g] = [L][T ] −2
puisque g est une accélération, celle due à la pesanteur. Il en résulte :
c Dunod – Toute reproduction non autorisée est un délit
[T] = [L] a+b [T ]−2b [M]g
soit
g=0
b = −a = −
1
2
On en déduit T = Cte × (l/g)1/2 . On retrouve ainsi, par la seule voie de l’analyse dimensionnelle,
l’absence de la masse dans l’expression de la période d’un tel pendule, absence que l’on doit attribuer
physiquement à l’égalité de la masse grave et de la masse inerte (cf. chapitre 7). L’étude quantitative
approfondie montre que cette constante vaut 2p (cf. chapitres 5 et 10).
b) Durée de Planck
Cherchons à déterminer une durée fondamentale t P à partir de de c , G et . Pour cela, écrivons
a priori cette durée sous la forme suivante :
[t P] = [G] a [c] b []g
Or les quantités G , c et s’expriment aisément en fonction d’une durée [T ] , d’une longueur [L]
et d’une masse [M ] ou d’une combinaison de ces dernières comme l’énergie [E] = [M][L] 2[T ] −2 (cf.
constantes fondamentales) :
[G] = [L] 3[M] −1 [T ]−2
[c] = [L][T ]−1
et [] = [E][T] = [M][L] 2[T ]−1
26
2. Cinématique du point mobile. Vitesse de rotation d’un repère
Il en résulte :
[tP ] = [L]3a [M]−a [T ] −2a [L]b [T ]−b [M]g [L]2g [T ]−g = [L] 3a+b+2g[M]−a+g [T ]−2a−b−g
Il en résulte en identifiant le système d’équations suivantes :
3a + b + 2g = 0
− a + g = 0 et
− 2a − b − g = 1
On en déduit aisément a = g = 1/2 et b = −5/2 , d’où :
G
c5
1/2
= 0, 54 × 10 −43 s
c) Longueur de Planck
On l’obtient rapidement à partir de la précédente en multipliant t P par c :
lP = ct P =
G
c3
1/2
= 1, 61 × 10−35 m
II . — CINÉMATIQUE DU POINT MOBILE
II . 1 . — Vitesse d’un point mobile par rapport à un référentiel R
a) Définition
Notant OA le vecteur position d’un point A compté à partir de l’origine O d’un référentiel R,
la vitesse de A par rapport à R est le vecteur suivant, noté vA/R ou plus brièvement v :
v A/R =
d OA
dt
R
Précisons que l’expression par rapport à R signifie pour un observateur lié au référentiel R, pour
lequel les vecteurs de base de R, ex , e y et e z sont fixes et donc indépendants du temps.
b) Composantes cartésiennes de vA/R
Comme OA = x e x + y e y + z e z , il vient (Fig. 2.2) :
vA/R =
dx
dy
dz
ex +
ey +
ez
dt
dt
dt
soit
vA/R = ẋ ex + y˙ e y + ż ez
en utilisant la notation pointée, internationalement admise depuis son introduction par I. Newton en
1671, pour désigner la dérivée par rapport au temps d’une fonction, ici x(t), y(t) ou z(t). Indiquons
que la notation d x/ d t a été introduite par G. Leibniz en 1682, et que celle x , attribuée à J. Lagrange,
date de 1756.
27
Cinématique du point mobile. Vitesse de rotation d’un repère
z
H
z
H
A
O
ϕ
O
y
P
x
A
ϕ
x
F IG . 2.2.
y
P
ρ
F IG . 2.3.
c) Composantes cylindriques de vA/R
Il est souvent commode d’exprimer la vitesse précédente v A/R à l’aide des coordonnées cylindriques r, w, et z (Fig. 2.3). Comme OA = r er + z e z, il vient :
vA/R = ṙ er + r
d er
+ ż ez avec
dt
d er
dt
=
R
d er
dw
ẇ = ẇ e w
R
ew étant le vecteur unitaire perpendiculaire à er et parallèle au plan Oxy. Il en résulte que :
vA/R = ṙ er + rw˙ e w + ż e z
Soulignons que nous avons ainsi exprimé, en b et c, le même vecteur dans deux bases différentes. En
b, la base utilisée était celle du référentiel R, en c, c’est la base cylindrique.
On distinguera donc soigneusement le référentiel R, qui est une donnée fondamentale pour définir
la vitesse puisqu’il représente l’observateur, de la base, parfois mobile, qui est une donnée technique et
donc secondaire mais nécessaire à l’exploitation d’une égalité vectorielle.
Dans la suite, on sera conduit à écrire un même vecteur dans deux bases différentes. Un indice rappellera la base utilisée. Par exemple, on écrira en colonne les composantes cartésiennes et cylindriques
du vecteur vA/R ; l’indice R indique qu’il s’agit d’une base invariablement liée au repère R, et l’indice Rc que la base utilisée est cylindrique :
c Dunod – Toute reproduction non autorisée est un délit
ẋ
ẏ
R ż
et
Rc
ṙ
rẇ
ż
Remarque : Certains auteurs distinguent, dans l’écriture des colonnes, la base B = (ex , ey , ez) du
repère R. Cette distinction systématique nous a paru superflue.
d) Composantes de Frenet ou composantes intrinsèques de la vitesse
Les composantes de Frenet (du nom du mathématicien français J.F. Frenet) sont relatives à la base
définie localement (en un point de la trajectoire C) par les trois vecteurs unitaires suivants : et , en et
eb = et × en. Le vecteur et est tangent à la trajectoire alors que en est, lui, normal à la trajectoire
conformément à la relation :
d et
e
= n
ds
R
dans laquelle s représente l’abscisse curviligne sur C orienté et R le rayon de courbure locale de
la trajectoire. Le plan Aet en est appelé plan osculateur. Ces composantes sont généralement les plus
28
2. Cinématique du point mobile. Vitesse de rotation d’un repère
adaptées à la résolution des problèmes qui se posent en mécanique du point matériel lorsqu’on connaît
la trajectoire (Fig. 2.4).
et
eb
z
A
A0
C
en
A "
C
C
s
O
C0
y
I
A
R0
"
I
J
C
x
F IG . 2.4.
F IG . 2.5.
D’après la définition de v A/R , on peut écrire :
vA/R =
d OA
dt
=
R
d OA
ds
ds
R dt
La signification du vecteur (d OA/ d s)R s’obtient aisément : A étant un point tendant vers A, ce
vecteur est la limite du vecteur AA /AA , dont la norme tend vers l’unité et dont le support tend vers la
tangente à C. Il s’identifie donc à et .
Quant à d s/ d t, appelé vitesse scalaire v, c’est au signe près, la norme de la vitesse suivant que
s est orienté dans le sens du mouvement ou non : d s/ d t = AA / d t = v. D’où :
vA/R = v e t
Pour préciser la signification géométrique du rayon de courbure R, considérons le point A voisin
de A sur la trajectoire. Ces deux points appartiennent à un même cercle C 0 . Évaluons, à l’aide de la
figure 2.5, le vecteur De t :
De t = A I − AI = AJ − AI = IJ
avec
IJ = 2 sin
Ds
ε
≈ε=
2
R0
Lorsque A tend vers A, Det /ε tend vers le vecteur unitaire e n orienté vers le centre C. On peut donc
écrire :
d et
d et
d et
en
R 0 = en soit
=
=
ds
ds
R0
ε
En identifiant avec la relation de définition du rayon de courbure, on en déduit que R est le rayon R0
du cercle intérieurement tangent à la trajectoire ; 1/R est sa courbure.
II . 2 . — Accélération d’un point mobile par rapport à un référentiel R
a) Définition
L’accélération d’un point A par rapport à un référentiel R est le vecteur suivant, noté a A/R ou
plus brièvement a :
aA/R =
d v A/R
dt
=
R
d2 OA
d t2
R
29
Cinématique du point mobile. Vitesse de rotation d’un repère
b) Composantes cartésiennes de l’accélération aA/R
On obtient immédiatement les composantes cartésiennes de a A/R à partir de celles de la vitesse
puisque les vecteurs de base sont fixes dans R :
aA/R = ẍ ex + ÿ ey + z̈ ez
noté aussi
R
ẍ
ÿ
z̈
c) Composantes cylindriques de l’accélération aA/R
En dérivant l’expression de la vitesse en coordonnées cylindriques, on trouve :
d er
d ew
+ z̈ ez
aA/R = r̈ er + ṙ
+ ṙẇ ew + rw
¨ ew + rw˙
dt R
dt R
Comme :
d er
d er
d ew
d ew
= ẇ
= ẇ
= ẇ ew et
= −w˙ er
dt R
dw R
dt R
dw R
l’expression de aA/R en coordonnées cylindriques est la suivante :
2
aA/R = (r̈ − rẇ ) e r + (rẅ + 2r˙ ẇ) e w + z̈ ez
soit
Rc
r̈ − rẇ2
rẅ + 2r˙ ẇ = (1/r) d(r2ẇ)/ d t
z̈
Les deux premières composantes sont qualifiées, respectivement, de radiale et d’orthoradiale.
d) Composantes de Frenet ou composantes intrinsèques de l’accélération
On déduit de v A/R exprimé dans la base de Frenet :
d(v et )
dt
aA/R =
=
R
de
dv
et + v t
dt
dt
avec
d et
de ds
e
= t
= nv
dt
ds dt
R
Donc :
c Dunod – Toute reproduction non autorisée est un délit
aA/R = at + a n avec
at =
dv
et
dt
et a n =
v2
en
R
Ainsi, l’accélération présente deux termes : le premier est l’accélération tangentielle, le second est
l’accélération normale. Cette écriture permet de distinguer deux grandes catégories de mouvements
d’un point :
i) les mouvements rectilignes, pour lesquels le rayon de courbure R est infini,
ii) les mouvements uniformes pour lesquels la norme de la vitesse est une constante (d v/ d t = 0).
Si R est infini et v constant, le mouvement est rectiligne et uniforme.
II . 3 . — Exemples
a) Mouvement hélicoïdal
Le mouvement hélicoïdal est celui d’un point A dont la projection dans le plan Oxy décrit un
cercle. C’est le mouvement en hélice décrit par un point d’un objet que l’on visse ; c’est aussi le mouvement d’une particule chargée dans un champ magnétique (cf. chapitre 8). En coordonnées cartésiennes,
les équations paramétriques caractéristiques de la trajectoire sont, v et h étant des constantes appelées
respectivement la pulsation et le pas de l’hélice (Fig. 2.6a) :
OA = r sin(vt) e x + r[1 − cos(vt)] ey + hvt ez
30
2. Cinématique du point mobile. Vitesse de rotation d’un repère
z
y
2r
h
C
A
C
O
!t
y
' = !t=2
x
Oz
P
x
P
a)
b)
F IG . 2.6.
La trajectoire de la projection P de A dans le plan Oxy est bien un cercle, de rayon r, puisque :
x
r
2
+
2
y−r
r
=1
Le rayon du cercle est r et son centre se trouve sur l’axe Oy à la distance r (Fig. 2.6b). En dérivant,
on en déduit les composantes cartésiennes de la vitesse et de l’accélération, respectivement :
−rv2 sin(vt)
rv2 cos(vt)
0
R
rv cos(vt)
rv sin(vt)
hv
R
Les composantes cylindriques s’obtiennent aisément. En effet :
r = (x2 + y 2)1/2 = 2r sin
vt
2
w = arctan
y
vt
=
x
2
z = hvt
On a respectivement pour vA/R et a A/R :
r̈ − rẇ2 = −rv 2sin (vt/2)
ṙ = rv cos (vt/2)
rẅ + 2r˙ ẇ = rv 2 cos (vt/2)
rẇ = rv sin (vt/2)
Rc
ż = hv
z̈ = 0
Rc
Quant aux composantes de Frenet, on les détermine en calculant les normes de la vitesse et de l’accélération :
v = v(r2 + h2) 1/2 et a = rv 2
d’où :
at =
dv
et = 0
dt
an = rv 2 en
et
R=
v2
=r
a
1+
h2
r2
La courbe n’étant pas contenue dans un plan, le vecteur binormal eb = e t × e n n’est pas constant
puisque sa direction change. Aussi définit-on la torsion T de la courbe par l’équation :
d eb
e
=− n
ds
T
Le calcul de T ne présente pas de difficulté particulière (cf. Exercices).
31
Cinématique du point mobile. Vitesse de rotation d’un repère
b) Mouvement cycloïdal
Considérons le mouvement d’une particule A caractérisé par les équations cartésiennes paramétriques suivantes, v étant une constante :
OA = r[vt − sin(vt)] e x + r[1 − cos(vt)] ey
On montre que c’est le mouvement d’un point situé sur la roue d’un vélo qui avance en roulant sans
glisser sur la chaussée (cf. Exercice P3.1)
y
2r
x
O
πr
2πr
F IG . 2.7.
La trajectoire est périodique puisque y est inchangé lorsque vt varie de 2p, x variant de 2pr.
Sur le tableau 2.1, on a rassemblé quelques valeurs caractéristiques de x et y.
vt
0
p/2
p
3p/2
2p
x
0
pr
r(p/2 + 1)
2pr
y
0
r(p/2 − 1)
2r
r
0
r
TAB . 2.1.
c Dunod – Toute reproduction non autorisée est un délit
Les composantes cartésiennes de v et a permettent de préciser la nature de la trajectoire dans le
plan Oxy (Fig. 2.7) :
rv 2 sin(vt)
rv[1 − cos(vt)]
rv 2 cos(vt)
rv sin(vt)
0
0
R
R
Notons qu’aux points de rebroussement (vt = 0, 2p, etc.), la vitesse s’annule contrairement à l’accélération dont la valeur se réduit à celle de la composante tangentielle. La pente de la cycloïde aux points
de rebroussement est ±∞ ; en effet :
dy
sin(vt)
2 sin(vt/2) cos(vt/2)
1
ẏ
= =
=
=
2
dx
1 − cos(vt)
tan(vt/2)
ẋ
2 sin (vt/2)
soit, pour vt = 0 et vt = 2p respectivement :
dy
dx
0
= ∞ et
dy
dx
2p
= −∞
Exprimons les composantes de v et a dans la base de Frenet. Comme v = 2rv sin(vt/2) :
vt
vt
vA/R = 2rv sin
e t et a t = rv 2 cos
et
2
2
On obtient alors aisément an et le rayon de courbure R :
a n = (a2 − a2t )1/2 en = rv 2 sin
vt
v2
= 4r sin
e n et R =
2
an
vt
2
32
2. Cinématique du point mobile. Vitesse de rotation d’un repère
III . — DIFFÉRENTS MOUVEMENTS D’UN REPÈRE
Rappelons que les repères d’espace associés aux référentiels R et R sont des ensembles de
points dont les distances mutuelles sont invariables. On dit aussi qu’ils forment des solides parfaits de
référence.
III . 1 . — Mouvements particuliers d’un repère R par rapport à un référentiel R
a) Translation du repère R par rapport au référentiel R
Le repère d’espace R a un mouvement de translation par rapport à un référentiel R si, au cours
du mouvement, A et B étant deux points quelconques fixes de R , le vecteur AB est constant par
rapport à R au cours du mouvement (Fig. 2.8) :
d AB
dt
=0
d’où
vA/R = vB/R
R
Il en est évidemment ainsi pour les vecteurs de la base orthonormée directe (e x , ey , ez ) :
d ex
dt
d ey
dt
=0
R
d ez
dt
=0
R
=0
R
Tous les points de R ont donc même vitesse et même accélération par rapport à R ; notons que, cette
même vitesse et cette même accélération peuvent être quelconques.
z0
z
z
R
t1
H
R
t2
R O
Ω
O
y
A
vA=R
y0
y
R0
ϕ
P
R
F IG . 2.9.
x
x
F IG . 2.8.
x0
b) Rotation du repère R autour d’un axe du référentiel R
Si le repère R tourne autour d’un axe du référentiel R, par exemple Oz, un point A, fixe
dans R, décrit, par rapport à R, un cercle de centre H et de rayon HA, H étant la projection de A
sur l’axe de rotation (Fig. 2.9). Sa vitesse :
vA/R =
ds
e t = HA
dt
dw
e t = HA w˙ et
dt
est donc portée par le vecteur unitaire et de la tangente à ce cercle. Notons que les points situés sur
l’axe Oz, commun à R et R, ont une vitesse nulle.
Les points O et A appartenant au même repère R , la vitesse du point A par rapport à R peut
s’écrire aussi :
HA
0
0
0
0
HA ẇ =
×
vA/R = V × OA puisque
R 0
R ẇ
R OH
33
Cinématique du point mobile. Vitesse de rotation d’un repère
La grandeur V se présente comme un vecteur porté par l’axe de rotation Oz ; sa mesure algébrique est
égale à ẇ, si l’orientation du plan et celle de la normale au plan sont reliées par la règle du bonhomme
d’Ampère ou du tire-bouchon de Maxwell : V = ẇ e z.
i) Si ẇ > 0, la rotation a lieu dans le sens direct Ox → Oy.
ii) Si ẇ < 0, la rotation a lieu dans le sens inverse Oy → Ox.
Ainsi, la distribution des vitesses de R , à la date t, est complètement déterminée par le vecteur
V appelé vitesse angulaire ou de rotation du repère R par rapport au référentiel R :
vA/R = V × OA
avec
V = ẇ e z
On écrira souvent, pour éviter toute ambiguïté, V R /R de façon explicite au lieu de V.
c) Mouvement hélicoïdal
Considérons le mouvement du repère R par rapport au référentiel R, tel que les axes Oz et O z
coïncident et qu’un point A de R , en dehors de O z , décrive une hélice. On sait que la trajectoire de
la projection P de A dans un plan perpendiculaire à Oz est un cercle.
Comme OA = OH + OP, H étant la projection de A sur Oz, on a :
vA/R = vH/R + vP/R
avec
vH/R = v H/R ez
et v P/R = V × OP
Par conséquent, puisque OP = HA :
v A/R = v H/R + V × HA
La distribution des vitesses des points du repère R, dans un tel mouvement, est donc caractérisée par
la relation vectorielle :
v A/R = v H/R + V × HA
c Dunod – Toute reproduction non autorisée est un délit
Ce mouvement est qualifié d’hélicoïdal car les points situés en dehors de l’axe décrivent des hélices.
Pour un autre point B, on a une relation analogue :
vB/R = vK/R + V × KB
K étant la projection de B suivant l’axe Oz. On en déduit, en retranchant les deux équations précédentes, puisque H et K ont même vitesse :
vA/R = v B/R + V × (HA − KB)
Comme HA − KB = HA − KH − HB = BA − KH et que les vecteurs KH et V sont colinéaires,
la relation précédente s’écrit :
vA/R = v B/R + V × BA
On retrouve le cas de la translation en faisant V = 0.
Remarque : Le plus souvent, on réserve le nom de mouvement hélicoïdal au cas particulier où les
vecteurs OH et V sont proportionnels.
34
2. Cinématique du point mobile. Vitesse de rotation d’un repère
III . 2 . — Mouvement le plus général du repère R par rapport au référentiel R
a) Champ des vitesses du repère R
Les mouvements, par rapport au référentiel R , de deux points quelconques A et B, appartenant
au repère R , sont tels que le carré de la distance AB qui sépare ces deux points est une constante
(Fig. 2.10a). On a donc AB · AB = Cte, soit, en dérivant par rapport au temps :
2AB ·
d AB
= 2AB ·
dt
d OB
dt
R
−
d OA
dt
R
= 2AB · vB/R − v A/R = 0
Ainsi (Fig. 2.10b) :
AB · v A/R = AB · v B/R
On montre que cette propriété d’équiprojectivité des vitesses sur AB implique la relation suivante entre
les vitesses des points A et B (cf. chapitre 1) :
vA/R = vB/R + AB × V ou
vA/R = v B/R + V × BA
Contentons-nous de rappeler la réciproque en multipliant scalairement les deux membres de cette dernière équation par AB :
v A/R · AB = v B/R · AB + (AB × V) · AB = vB/R · AB
puisque (AB × V) · AB = 0.
Ainsi, d’après l’équation vectorielle, qui donne le champ des vitesses de R par rapport à R, le
mouvement le plus général de R par rapport à R peut être considéré, à chaque instant, comme un
mouvement hélicoïdal dont le vecteur vitesse de rotation est V.
z A
z
R
O
R
x
O
y
B
vB/R
vA/R
y
A
x
a)
B
H
K
b)
F IG . 2.10.
b) Degrés de liberté du mouvement de R
On appelle degrés de liberté du mouvement du repère R par rapport au référentiel R le nombre
de paramètres indépendants qu’il faut se donner pour connaître, de manière non ambiguë, la position
de R par rapport à R . Pour déterminer cette position il suffit de se donner trois points non alignés,
A, B, C de R : d’abord trois paramètres pour la position de A, par exemple x A , yA, zA ; ensuite
la position de B est déterminée par deux nouvelles coordonnées, puisque B évolue sur la surface de
centre A et de rayon AB ; enfin la position de C est fixée par une dernière coordonnée, car ce point se
déplace sur la courbe intersection de deux sphères, l’une de centre A et de rayon AC, l’autre de centre
B et de rayon BC. On a donc besoin, en tout, de six paramètres pour situer R par rapport à R.
35
Cinématique du point mobile. Vitesse de rotation d’un repère
III . 3 . — Caractère axial du vecteur vitesse de rotation
On aura observé que la définition de V s’appuie sur celle du produit vectoriel, laquelle exige la
convention du bonhomme d’Ampère. La vitesse de rotation est donc un vecteur axial (cf. chapitre 1).
Sur le plan de la représentation mathématique, cette quantité, que l’on peut caractériser par trois composantes, comme les vecteurs, mais reliées par une convention supplémentaire, est un être mathématique
plus élaboré ; on montre que c’est un tenseur antisymétrique d’ordre deux [M ] qui s’exprime dans la
base orthonormée de R par une matrice carrée antisymétrique à neuf éléments de la forme :
m12
0
−m 23
0
−m12
−m13
m 13
m 23
0
En explicitant dans la base de R l’égalité suivante, [M ]OA = V × O A, dans laquelle O est l’origine de R et A l’un de ses points, de coordonnées (x , y, z ), on peut exprimer les composantes
du vecteur vitesse de rotation en fonction des élements de la matrice représentant le tenseur antisymétrique. En effet, on a :
R
ce qui donne, en effectuant :
0
−m12
−m13
R
On en déduit, en identifiant :
m12
0
−m23
m 13
m23
0
R
x
vx
y =
vy ×
z
R vz
R
x
y
z
vy z − v z y
m12 y + m13 z
vz x − v x z
−m12 x + m23 z =
−m13 x + m23 y
R vx y − v y x
V = −m 23 ex + m13 ey − m12 ez
c Dunod – Toute reproduction non autorisée est un délit
CONCLUSION
Retenons les résultats essentiels de la cinématique qui permet de décrire le mouvement de points
par rapport à un référentiel R, lequel est un repère d’espace et de temps associé à l’observateur.
(1) On introduit naturellement pour un point A, en mouvement par rapport à R, les concepts
vectoriels de vitesse et d’accélération que l’on peut exprimer souvent par leurs composantes dans des
bases variées :
d OA
vA/R =
= v e t de composantes cartésiennes ẋ ẏ ż
dt R
aA/R =
d2 OA
d t2
=
R
dv
v2
e t + en
R
dt
de composantes cartésiennes
ẍ ÿ z̈
Soulignons la distinction entre le référentiel R, par rapport auquel on étudie les mouvements, par l’intermédiaire des vecteurs vitesse et accélération, et toute base de projection dans laquelle il est commode
d’exprimer les relations entre les différents vecteurs. Dans ce contexte, on retiendra aussi les expressions de la vitesse et de l’accélération d’un point en coordonnées cylindriques, respectivement :
Rc
ṙ
rẇ
ż
et
Rc
r̈ − rẇ2
rẅ + 2r˙ ẇ = (1/r) d(r 2ẇ)/ d t
z̈
36
2. Cinématique du point mobile. Vitesse de rotation d’un repère
(2) Le mouvement de rotation d’un repère d’espace R par rapport au référentiel R peut être
caractérisé par un vecteur VR /R , appelé vecteur vitesse de rotation de R par rapport à R. Il est
nécessaire pour cela que toutes les bases orthonormées choisies soient directes.
(3) Le mouvement le plus général de R par rapport à R est un mouvement hélicoïdal ; on l’exprime à l’aide de la relation suivante entre les vitesses de deux points quelconques A et B de R par
rapport à R :
vA/R = v B/R + VR/R × BA
VR /R étant la vitesse de rotation de R par rapport à R. On écrit souvent la relation précédente
sous la forme réduite :
d AB
= V × AB
dt R
Pour un mouvement de translation de R par rapport à R , V = 0 .
EXERCICES ET PROBLÈMES
P2– 1. Mouvement hélicoïdal
Un point A se déplace, relativement à un référentiel R = Oxyz, le long d’une courbe d’équations
paramétriques :
x = 0, 3 cos(vt)
y = 0, 3 sin(vt)
z = 0, 1 vt
où v = 2p rad . s −1. L’unité de longueur est le cm.
1. Exprimer, dans la base de R, les composantes de sa vitesse et de son accélération. En déduire
la norme de ces vecteurs.
2. Trouver la vitesse et l’accélération en coordonnées intrinsèques. En déduire le rayon de courbure
de la trajectoire.
3. Calculer la torsion T de la trajectoire.
P2– 2. Mouvement dans le champ de pesanteur uniforme
On considère, dans un plan Oxy, les trajectoires des points ayant une accélération constante
a = −g ey et une vitesse initiale v0 faisant l’angle a avec l’axe Ox (Fig. 2.11).
1. Montrer qu’il existe deux valeurs de a pour lesquelles ces trajectoires, issues de l’origine O,
atteignent une même cible C.
2. En déduire l’équation de la courbe enveloppe de toutes les trajectoires correspondant à une même
valeur de la norme de v0.
y
Came
y
g
H r
v0
O
α
A
w
C
Oz
x
F IG . 2.11.
F IG . 2.12.
x
Cinématique du point mobile. Vitesse de rotation d’un repère
37
P2– 3. Déplacement d’un point matériel le long d’une came
Un point matériel A est astreint à se déplacer, dans le plan Oxy d’un référentiel R = Oxyz, le
long du pourtour d’une came, reliant r et w fixe dans R (Fig. 2.12). L’équation polaire de la came est
r = b − c cos w. La tige, qui permet le mouvement et réalise à l’aide d’un ressort le contact sur la came,
tourne uniformément autour de l’axe Oz, avec une vitesse angulaire V = ẇ.
1. Exprimer, en coordonnées polaires (r, w), la vitesse v et l’accélération a de A par rapport au
référentiel R.
2. Calculer v et a pour V = 30 tr . min −1 , lorsque A atteint le point H de la came (w = p/2),
sachant que b = 2 cm et c = 1 cm.
P2– 4. Mouvement en spirale
Un point A décrit une courbe plane d’équations polaires paramétriques : r = b exp(−t/t) et
w = vt, les quantités b, t et v étant des constantes.
1. Calculer les composantes radiale et orthoradiale de la vitesse et de l’accélération. En déduire les
normes de ces vecteurs ainsi que l’angle que fait la vitesse avec le rayon vecteur.
2. Trouver les composantes intrinsèques de l’accélération.
3. Quel est le rayon de courbure R de la trajectoire ?
P2– 5. Mouvement sinusoïdal
Un point en mouvement suivant un axe Ox possède une accélération proportionnelle à sa distance
au point O. Trouver son mouvement dans les deux cas suivants :
1. le coefficient de proportionnalité est négatif et s’écrit −v 20. On suppose qu’initialement la particule est en O , avec une vitesse v0 = v 0 ex .
2. Même question si le coefficient de proportionnalité est positif et s’écrit a 2 .
c Dunod – Toute reproduction non autorisée est un délit
P2– 6. Combinaison de deux mouvements sinusoïdaux
Un point évolue dans un plan de telle sorte que ses mouvements suivant deux axes rectangulaires
soient sinusoïdaux : x = a cos(vt) et y = b cos(vt + f).
Trouver l’équation de la trajectoire et déterminer ses caractéristiques. Étudier les cas où f = 0,
f = p. À quelle condition la trajectoire est-elle un cercle ? Citer un exemple physique d’un tel mouvement.
P2– 7. Mouvement à accélération de la forme V × v
Un point a une accélération a reliée à la vitesse par la relation : a = V × v, V étant un vecteur
constant.
1. Que peut-on dire de la norme de la vitesse et de sa composante suivant le vecteur V ?
2. Montrer que, si initialement v est perpendiculaire à V, la trajectoire est un cercle dont on
déterminera le rayon R.
38
2. Cinématique du point mobile. Vitesse de rotation d’un repère
P2– 8. La passe en-avant au rugby
Au rugby, les arbitres semblent juger la passe en-avant à partir du mouvement des mains des
joueurs, alors que les spectateurs considèrent, eux, le mouvement du ballon par rapport au terrain de
jeu. Les discussions passionnantes qui en résultent incitent à analyser cinématiquement le problème.
Pour cela, considérons deux joueurs partenaires A et B (Fig. 2.13), situés sur une ligne parallèle à la
ligne d’en-but, et se déplaçant avec la même vitesse v e par rapport au référentiel R du terrain. Rappelons que ce dernier est délimité par les lignes de touches et les lignes d’en-but.
Supposons qu’à un instant, A fasse une passe vers B en communiquant au ballon une vitesse v
parallèlement à la ligne d’en-but, dans le référentiel R que leurs centres de masses définissent, en
translation par rapport à R .
Ligne d’en-but
ve
ve
A v B
F IG . 2.13.
1. Quelle est la vitesse v du centre C du ballon par rapport à R , dans la situation de la passe
précédente de A vers B ? Calculer l’angle a que fait v avec la ligne d’en-but pour v e = 7 m.s−1 et
v = 14 m.s −1 .
2. Sachant que l’on néglige toute modification de la vitesse de C avant réception du ballon par B ,
situé à 10 m de son coéquipier, calculer la longueur l parcourue par B entre l’envoi du ballon et sa
réception. Conclure et commenter.
3
Changement de référentiel
Jusqu’à maintenant nous avons décrit le mouvement d’un mobile ponctuel A par rapport à un
référentiel R en introduisant sa vitesse et son accélération par rapport à ce référentiel.
La question à laquelle nous souhaitons répondre maintenant est d’une autre nature : R et R étant
deux référentiels en mouvement quelconque l’un par rapport à l’autre, quelles relations existe-t-il entre
les caractéristiques cinématiques, vitesse et accélération, d’un même mobile A, relatives à R et R
(Fig. 3.1a) ?
c Dunod – Toute reproduction non autorisée est un délit
Contrairement à un usage malheureusement persistant, nous n’emploierons pas les qualificatifs
« absolu »et « relatif »généralement attribués respectivement à R et R . En effet, d’une part, toutes
les vitesses et toutes les accélérations sont des grandeurs relatives à un référentiel, et d’autre part, le
qualificatif « absolu » rappelle l’erreur historique de Newton, celle d’avoir introduit le concept inutile
et infondé d’espace absolu (cf. chapitre 4).
Remarque : Précisons que R et R sont quelconques au sens où la dynamique privilégie certains
référentiels dits galiléens (cf. chapitre 4). En revanche, en cinématique de la relativité
restreinte, R et R doivent être tous deux galiléens (cf. Relativité).
z
z
A
R
y
O
R
O
R
x
O
z
z
O Index
y
H
x
x
a)
b)
F IG . 3.1.
x
y
R
y
H
40
3. Changement de référentiel
I . — RELATIVITÉ DU MOUVEMENT
I . 1 . — Hypothèse de l’universalité du temps ou quatrième loi de Newton
Considérons deux référentiels R et R en mouvement quelconque l’un par rapport à l’autre et un
phénomène physique se produisant au point O , par exemple le passage devant un index de l’extrémité
d’un pendule dont le bâti est lié à R (Fig. 3.1b).
L’hypothèse de l’universalité du temps, admise par Newton, suppose que les périodes du pendule
mesurées par les horloges H et H sont égales : le temps est un paramètre universel. Cette hypothèse,
qui est à la base de la cinématique dite galiléenne ou newtonienne, est confirmée par l’expérience avec
une excellente approximation, mais infirmée dès que les vitesses considérées ne sont plus négligeables
devant la constante d’Einstein c (cf. Relativité et invariance ).
Dans le cadre galiléen, deux référentiels R et R ne se distinguent donc que par leur repère d’espace, lequel est défini par l’ensemble d’un point origine et de trois vecteurs linéairement indépendants
qui forment la base du référentiel.
I . 2 . — Hypothèse sur l’espace en cinématique galiléenne
Entre les positions r et r que donnent deux observateurs différents, en mouvement l’un par
rapport à l’autre, lorsqu’ils localisent spatialement un même événement en un point A , on admet que
l’on puisse choisir des étalons de mesure identiques de sorte que (Fig. 3.1b) :
r = r + OO
ou
OA = OA + OO
Selon cette hypothèse, l’espace n’est pas universel mais relatif (r = r) : la position de A n’est pas
invariante par changement de référentiel.
Remarque : Cette relation, qui s’écrit aussi OA = OA + OO, ne doit pas être confondue avec la relation d’addition vectorielle, dite de Chasles, dans un même référentiel, OA = OO + OA,
laquelle se justifie par l’appartenance des points O, O et A à un même référentiel R.
a) Cas d’un mouvement de translation rectiligne uniforme de R par rapport à R
Dans ce cas particulier, on a, en désignant par v e la vitesse constante de O par rapport à R , en
choisissant l’axe Ox selon cette vitesse et en supposant que O coïncide avec O à l’instant pris comme
origine (Fig. 3.2) :
OA = O A + OO = O A + ve t
ce qui donne, en explicitant :
x = x + vet
y = y
y
y
z = z
R
A
R
O
x
x
O
F IG . 3.2.
ve
41
Changement de référentiel
b) Transformation de Galilée
Pour une famille particulière de référentiels privilégiés dits galiléens, qui sont en translation les uns
par rapport aux autres (cf. chapitre 4), les formules de transformation précédentes sur le temps et sur
l’espace entre deux référentiels R et R forment la transformation de Galilée :
t = t
x = x + v et = xe + vet
y = y
z = z
Vectoriellement, la transformation de Galilée sur les coordonnées spatiales s’écrit aussi, en utilisant
les symboles et ⊥ pour désigner respectivement les directions parallèles et perpendiculaires à la
vitesse ve :
OA = O A + OO
et OA ⊥ = O A ⊥ d’où
OA = OO + OA
En cinématique galiléenne, on retrouve le même résultat que celui donné par la relation de Chasles, d’où
la confusion fréquente entre les deux relations.
c) Limites de la cinématique galiléenne : la transformation de Lorentz-Poincaré
Historiquement, les hypothèses fondamentales précédentes ont donné d’excellents résultats pendant les quelques trois cents ans qui ont suivi la première synthèse de Newton entre pesanteur et gravitation (cf. chapitre 7), au point que, confrontés à ses insuffisances en physique moderne, précisément
dès que la vitesse des corps n’est plus négligeable devant la constante d’Einstein c , les physiciens on a
dû se défaire de ce que l’on supposait immuable. Cet épisode rappelle que la physique (et donc la mécanique) s’appuie sur un corps de doctrines conforté ou rejeté par l’expérience, comme toute théorie
scientifique ! Même si la cinématique galiléenne constitue encore aujourd’hui, pour beaucoup de phénomènes quotidiens, une excellente approximation, l’analyse la plus satisfaisante aujourd’hui est celle
que proposa Einstein en 1905 (relativité restreinte), puis en 1916 (relativité générale) ; c’est cette dernière qui permet une localisation spatiale précise des objets (cf. Relativité et invariance).
La transformation de Lorentz est la généralisation suivante de la transformation de Galilée :
ve
t = g e t + 2 x
x = ge (x + ve t)
y = y
z = z
c
avec ge = (1 − ve2/c 2) −1/2 . Comme on a aussi :
x = ge (x − vet)
soit
x=
x
+ vet
ge
c Dunod – Toute reproduction non autorisée est un délit
on en déduit l’écriture vectorielle suivante de la transformation spatiale de Lorentz-Poincaré :
O A
OA =
+ OO
ge
et OA⊥ = O A⊥ d’où
OA = O A + OO
Ainsi, dans le cas de la transformation de Lorentz-Poincaré, la relation entre les coordonnées d’un
même événement par rapport à deux référentiels galiléens ne coïncide pas avec la relation géométrique
de Chasles, ce qui souligne la différence de nature entre ces deux relations.
I . 3 . — Dérivées d’un vecteur
C’est un fait expérimental bien connu que les concepts de vitesse et d’accélération sont relatifs
au référentiel par rapport auquel on analyse le mouvement. Nous avons vu que, dans le calcul, cela se
traduisait par la nécessité de dériver, par rapport au temps et relativement à une base, le vecteur reliant
le point A considéré à l’origine choisie du référentiel. Rappelons que l’expression relativement à une
base veut simplement dire que l’on considre que les vecteurs de base du référentiel ne varient pas au
cours du mouvement.
42
3. Changement de référentiel
Il importe donc, avant tout développement, d’établir la relation entre les dérivées d’un même vecteur, par rapport au temps, mais relativement à des bases de référentiels différents.
Considérons un vecteur U de composantes (X , Y , Z ) dans la base de R et (X , Y, Z ) dans celle
de R :
U = X eX + Y eY + Z e Z = X eX + Y eY + Z e Z
Par définition, la dérivée d’un vecteur par rapport au temps, relativement à une base, est le vecteur
obtenu en dérivant ses composantes dans cette base et en considérant ses vecteurs de base fixes. Ainsi :
dU
dt
= Ẋ eX + Ẏ eY + Ż eZ
dU
dt
et
R
= Ẋ eX + Ẏ eY + Ż eZ
R
À partir de U = X e X + Y eY + Z eZ , exprimons (d U/ d t) R :
dU
dt
= Ẋ e X + X
R
d eX
dt
d eY
dt
+ Ẏ e Y + Y
R
+ Ż eZ + Z
R
d eZ
dt
R
Or, V étant le vecteur vitesse de rotation de R , par rapport à R, on sait que :
d eX
dt
R
= V × eX · · ·
d’où
dU
dt
dU
dt
=
R
R
+ V × (X eX + Ye Y + Z eZ )
Il en résulte que :
dU
dt
dU
dt
=
R
R
+V×U
Retenons que le terme complémentaire provient de la modification de la direction des vecteurs unitaires
de la base de R , du fait du mouvement de rotation de R par rapport à R.
Cette égalité vectorielle a été établie au XIX e siècle par l’ingénieur français E. Bour. Elle est très
utile dans la pratique, car elle permet, connaissant les composantes d’un vecteur U dans la base de R ,
de déterminer les composantes dans R de sa dérivée par rapport au temps, relativement à une autre
base. Notons que V × U est nul si R et R sont en translation l’un par rapport à l’autre (V = 0) :
dU
dt
=
R
dU
dt
R
Remarque : (1) Dans le cas où U est un vecteur fixe par rapport à R , ce qui est le cas des vecteurs
unitaires de R, cette formule se réduit à :
dU
dt
R
=V×U
(2) Le vecteur V admet les mêmes dérivées par rapport à t, relativement à R et R ,
quel que soit le mouvement de R par rapport à R :
dV
dt
=
R
dV
dt
R
43
Changement de référentiel
I . 4 . — Composition des vecteurs vitesses de rotation
Soient deux points A et B appartenant à un référentiel R 2, en rotation par rapport aux référentiels
R 0 et R1 . Notant V2/0 et V 2/1 les vecteurs vitesses de rotation de R 2 par rapport à R 0 et R 1
respectivement, et V1/0 le vecteur vitesse de rotation de R 1 par rapport à R0, il vient :
d AB
dt
0
= V 2/0 × AB
Comme, d’autre part :
d AB
dt
et
d AB
dt
0
1
= V2/1 × AB
d AB
dt
=
1
avec
d AB
dt
=0
2
+ V1/0 × AB
nous en déduisons l’égalité : V2/0 × AB = V2/1 × AB + V 1/0 × AB, soit, puisque les points A et B
de R2 sont quelconques :
V 2/0 = V2/1 + V1/0
Cette addition vectorielle des vitesses de rotation se généralise à un nombre quelconque de repères.
Exemple : Le repère R2 d’origine O, et de vecteurs de base e r, e w et eu (Fig. 3.3), s’obtient à partir
du repère R = Oxyz en procédant à deux rotations successives, l’une d’angle w autour de l’axe O e z
et l’autre d’angle u autour de l’axe O ew. L’axe Ou est l’intersection des plans O e x ey et O e r e u .
V R2 /R = VR 2/Ouwz + VOuwz/R = u̇ e w + ẇ ez
z
r
θ
eϕ
y
O
ϕ
x
θ
u
eθ
c Dunod – Toute reproduction non autorisée est un délit
F IG . 3.3.
II . — COMPOSITION DES VITESSES
II . 1 . — Loi de composition des vitesses
Les vitesses d’un même point A en mouvement par rapport aux référentiels R et R , en mouvement quelconque par rapport à R , s’écrivent, respectivement :
vA/R =
d OA
dt
et vA/R =
R
d O A
dt
R
Afin d’établir la relation entre ces deux vitesses, introduisons dans la première expression la relation
vectorielle OA = OO + OA , O étant l’origine du repère R . Il vient :
d OA
dt
=
R
d OO
dt
+
R
d O A
dt
R
44
3. Changement de référentiel
Le premier terme du membre de droite représente la vitesse de O par rapport à R, v O /R . Quant au
second, il s’écrit, d’après la formule de Bour :
d O A
dt
d O A
dt
=
R
R
+ VR /R × O A
où VR /R est le vecteur vitesse de rotation de R par rapport à R . Il en résulte :
vA/R = v O /R +
d OA
dt
R
+ VR /R × O A
soit la relation suivante, entre les vitesses vA/R et vA/R :
vA/R = vA/R + v e/R
ve/R = v O/R + V × O A
avec
en simplifiant l’écriture de VR /R en l’absence d’ambiguité. La vitesse ve est appelée la vitesse d’entraînement. Notons que c’est la vitesse par rapport à R du point A , invariablement lié à R , et qui à
l’instant considéré coïncide avec A ; aussi dit-on que c’est la vitesse du point A coïncidant avec A.
Dans le cas particulier de la translation, V = 0, la vitesse d’entraînement se réduit à v O /R = v e
(Fig. 3.2) ; elle est alors indépendante de la position du point A : on dit, exceptionnellement, que A est
entraîné avec la « vitesse du référentiel R ».
Remarque : Curieusement, le concept de vitesse d’entraînement n’est pas introduit dans les ouvrages
anglo-saxons.
II . 2 . — Exemples
a) Problème du parapluie
Comment une personne, se déplaçant suivant l’axe Ox d’un référentiel R, avec une vitesse u,
doit-elle incliner son parapluie pour se protéger au mieux de la pluie qui tombe suivant −Oy avec la
vitesse v (Fig. 3.4) ?
y
R0
y0
u
v0
R
O
u
v
®
O0
x
x0
F IG . 3.4.
L’axe du parapluie doit être dirigé suivant la direction de la vitesse v des gouttes de pluie par
rapport à R lié à la personne en mouvement : v = v − u, u étant la vitesse d’entraînement, d’où
l’angle d’inclinaison a = (v, v ) tel que tan a = u/v .
b) Théorie newtonienne de l’aberration des étoiles
La composition des vitesses précédente a permis à l’astronome anglais J. Bradley de montrer, en
1728, que la lumière se propageait avec une vitesse finie de l’ordre de 3 × 108 m . s −1 , conformément
aux conclusions tirées en 1676 par l’astronome allemand O. Roemer, à partir de l’observation du satellite
Io de Jupiter. C’est le phénomène connu sous le nom de l’aberration des étoiles, que l’on doit étudier
en toute rigueur dans le cadre de la relativité.
45
Changement de référentiel
Bradley observa que l’étoile g du Dragon (constellation entre la Grande et la Petite Ourse), située
approximativement sur un axe perpendiculaire au plan de l’écliptique (plan du mouvement de la Terre
autour du Soleil) décrivait, en une année, une trajectoire apparente P E A H , homothétique de celle
PEAH de la Terre (Fig. 3.5a). Le diamètre apparent de cette trajectoire vaut 2a ≈ 2u/v. À partir de la
mesure de 2a ≈ 40 et de u ≈ 30 km . s−1 , Bradley en déduisit v ≈ 3 × 108 m . s −1 (Fig. 3.5b).
Remarques : (1) l’aberration stellaire diffère de la parallaxe, car elle concerne toutes les étoiles de la
même manière.
(2) Cette expérience est la première qui montra le mouvement quasi circulaire du centre
de la Terre autour du Soleil.
H0
° A0
P0
°
A0
E0
(Printemps) P
®
Plan de l' écliptique
Terre
Soleil
E
(Été)
(Hiver)
H
v0
(Automne)
A u
a)
u
A
v
®
b)
F IG . 3.5.
c) Lancement vers l’est des satellites artificiels
La composition des vitesses permet de montrer qu’on tire avantage, au mieux, de la rotation de
la Terre en installant les champs de tirs de satellites artificiels le plus près possible de l’équateur et
en les lançant vers l’est (Fig. 3.6a). Sur la figure, on a représenté le référentiel terrestre R = Txyz
invariablement lié à la Terre, le référentiel géocentrique Rg = Tx0y0 z0 , qui a pour origine le centre T
de la Terre et des axes parallèles à ceux du référentiel de Copernic R0 = C0 x0y 0z0 d’origine le centre
de masse C du système solaire et dont les axes sont définis par trois étoiles éloignées.
z z0
c Dunod – Toute reproduction non autorisée est un délit
T
Ouest
Est
N
z0
C0
x0
H
O
µ
y0
v O=Rs
y
vA=R 0
T
R0
x0
a)
v A=R
y0
x
Rg
O
S
ve
b)
F IG . 3.6.
est :
La vitesse d’un point O de la surface de la Terre, de latitude l = p/2 − u, par rapport à R g ,
v O/R g = V T RT sin u ≈ 465, 4 × cos l (m . s −1)
46
3. Changement de référentiel
puisque le rayon terrestre et la vitesse de rotation de la Terre autour de son axe de révolution valent
respectivement :
R T ≈ 6, 4 × 106 m et V T =
2p
≈ 7, 3 × 10 −5 rad . s −1
3 600 × 24
D’après la composition des vitesses, une fusée A lancée en O, de la Terre R = Txyz, avec une
vitesse vA/R a, par rapport à R g, la vitesse vA/Rg = v A/R + v O/R g (Fig. 3.6b). Pour que v A/Rg soit
maximal, il faut que :
i) v O/Rg soit maximal, c’est-à-dire l = 0,
ii) vA/R soit colinéaire et de même sens que vO/R g, c’est-à-dire dirigé vers l’est.
Remarque : (1) Parmi les bases de lancement de satellites, Cap Canaveral aux États-Unis (l = 28, 5 ◦),
Pletsek en Russie (l = 63 ◦ ), Tyuratam (Baïkonour) dans le Kazakhstan (l = 46, 25 ◦),
Tanegashima au Japon (l = 30, 5 ◦ ), Kourou en Guyane française (l = 5, 23 ◦), c’est
cette dernière qui réalise le mieux la première condition. En 1999, une fusée a été lancée
depuis l’équateur (l = 0), à partir d’une ancienne plateforme de forage en mer transformée en base de lancement. Cependant l’intérêt technique et économique d’une telle mise
en œuvre s’avère limité.
(2) Pour que le lancement soit effectué en toute sécurité, notamment en cas d’explosion de
la fusée, les régions situées à l’est des bases de lancement sont généralement inhabitées.
C’est un autre avantage du site de Kourou.
d) Composition des vitesses en coordonnées sphériques
Une tige T , dont une extrémité O est fixe dans un référentiel R = Oxyz, a par rapport à R un
mouvement quelconque caractérisé par les paramètres u et w. Un point mobile A se déplace sur la
tige. Sa position sur T est définie par r = OA (Fig. 3.7).
Comme OA = r er , on en déduit : vA/T = ṙ er. D’autre part, ve = V×OA avec V = u̇ e w +ẇ ez,
d’où :
vA/R = v A/T + v e avec ve = (u̇ ew + ẇ ez ) × r er
Dans la base (er, e u, e w) liée à T , les vecteurs v A/T , ve et vA/R s’explicitent selon :
T
ṙ
0
0
T
ẇ cos u
0
r
−ẇ sin u × 0 =
r u̇
0
r
ẇ
sin u
u̇
T
T
et
T
z
H
T
A
θ r
R
eϕ
O
P
ϕ
x
eθ
F IG . 3.7.
y
ṙ
ru̇
rẇ sin u
47
Changement de référentiel
III . — COMPOSITION DES ACCÉLÉRATIONS
III . 1 . — Loi de composition des accélérations
Dérivons v A/R dans l’équation traduisant la loi de composition des vitesses :
d v A/R
dt
=
R
d vA/R
dt
d v O/R
dt
+
R
On a, d’après la formule de Bour :
d v A/R
d v A/R
=
+ V × vA/R
dt
dt
R
R
+
R
dV
dt
R
d O A
dt
et
× OA + V ×
=
R
d O A
dt
d O A
dt
R
R
+ V × O A
Comme :
aA/R =
d vA/R
dt
d v A/R
dt
aA/R =
R
et a O/R =
R
d v O/R
dt
R
on obtient :
aA/R = a O /R + a A/R +
dV
dt
R
× OA + V × (V × O A) + 2V × vA/R
ce que l’on écrit sous la forme :
aA/R = aA/R + ae/R + a C
avec :
ae/R = aO /R +
dV
× OA + V × (V × O A)
dt
et
aC = 2V × v A/R
a) Accélération d’entraînement
c Dunod – Toute reproduction non autorisée est un délit
Le terme a e est appelé l’accélération d’entraînement. Il s’interprète comme ve/R : c’est l’accélération d’un point A invariablement lié à R puisque, d’après la formule de composition des accélérations, on voit que aA /R = a e/R si aA /R et vA /R sont nuls. On dit aussi que ae/R est
l’accélération du point A coïncidant avec A.
Dans le cas de la translation (V = 0), a e se réduit à ae/R = aO /R . L’accélération d’entraînement est la même pour tout point A. C’est le cas exceptionnel où l’on peut parler d’« accélération d’un
référentiel par rapport à un autre référentiel ».
Si O et O sont confondus et V = Cte (Fig. 3.8) : ae/R = V × (V × OA) = −V 2 HA,
HA étant le vecteur projection de OA dans un plan perpendiculaire à V. C’est ce terme qui est à
l’origine de la force centrifuge, comme nous le verrons ultérieurement (cf. chapitre 7).
z z
ae/R
H
A
O
x
y
y
R x R
F IG . 3.8.
P
48
3. Changement de référentiel
Remarque : La relation entre ae et ve n’est pas simple :
ae/R =
d ve/R
dt
R
− V R /R × vA/R =
d ve/R
dt
R
sauf évidemment dans le cas de la translation. De même que pour v e/R , le concept d’accélération d’entraînement est ignoré dans les ouvrages anglo-saxons, alors qu’il joue un
rôle essentiel dans l’expression des forces d’inertie (cf. chapitre 7).
b) Accélération de Coriolis
Le terme a C = 2V × vA/R est l’accélération de Coriolis introduite par le physicien français
G. Coriolis en 1835. C’est ce terme qui est à l’origine de la célèbre force de Coriolis (cf. chapitre 7).
Notons que cette accélération disparaît dans les deux cas particuliers suivants :
i) pour V = 0, c’est-à-dire pour un mouvement de translation,
ii) si A est invariablement lié à R , c’est-à-dire en équilibre par rapport à R .
III . 2 . — Exemples
a) Cinématique terrestre
Proposons-nous d’exprimer l’accélération d’un point O de la surface de la Terre par rapport au
référentiel de Copernic R0 (Fig. 3.6). Introduisons le référentiel géocentrique R g = Tx 0y0z0 . Il vient,
d’après la composition des accélérations :
a O/R0 = a O/R g + aT/R 0
puisque
VR g /R0 = 0
Comme aO/R g = −V 2T HO, V T étant la vitesse angulaire de rotation de la Terre autour de son axe de
rotation, on a : aO/R0 = −V 2T HO + aT/R 0 . Concrètement :
V2T HO = V2T R cos l = (7, 3 × 10 −5 )2 × 6, 4 × 106 × cos l ≈ 3, 41 × 10 −2 × cos l (m . s−2 )
et
aT/R 0 =
v 2T/R0
ST
≈
(30 × 10 3) 2
= 6 × 10 −3 m . s−2
149 × 109
b) Composition des accélérations en coordonnées sphériques
Reprenons l’exemple du point A sur la tige T (Fig. 3.7). On a :
aA/T = r̈ er
ae =
dV
× OA + V × (V × OA)
dt
et a C = 2V × vA/T
L’explicitation de ae et a C dans la base T , associée aux coordonnées sphériques, donne respectivement :
T
−rẇ 2 sin 2 u − ru̇2
ẇ cos u
0
ẅ cos u − ẇ u̇ sin u
r
−ẇ sin u ×
r u̇ + −ẅ sin u − ẇ u̇ cos u × 0 =
−rẇ2 sin u cos u + r ü
u̇
˙ u̇ cos u + rw
¨ sin u
ü
T rẇ sin u
T
T 0
T +2rw
49
Changement de référentiel
et
2
T
ẇ cos u
0
ṙ
−ẇ sin u × 0 =
2ṙ u̇
u̇
T 0
T 2ṙẇ sin u
On en déduit aA/R = aA/T + a e + ac , de composantes :
T
r̈ − r ẇ2 sin2 u − r u̇2
r ü − r ẇ 2 sin u cos u + 2ṙ u̇
rẅ sin u + 2rw˙ u̇ cos u + 2ṙẇ sin u
CONCLUSION
Retenons :
(1) La loi de composition des vecteurs vitesses angulaires : V 2/0 = V2/1 + V1/0
(2) La loi de composition des vitesses :
vA/R = vA/R + ve
avec
ve/R = v O /R + V × OA
où V est le vecteur vitesse de rotation de R par rapport à R.
(3) La loi de composition des accélérations :
aA/R = a A/R + ae + aC
avec pour l’accélération d’entraînement et l’accélération de Coriolis, respectivement :
ae/R = aO /R +
dV
× O A + V × (V × OA)
dt
et a C/R = 2V × v A/R
Ces relations possèdent un champ d’application très vaste, puisque, d’une part, elles préparent toute
l’étude de la dynamique et, d’autre part, elles possèdent un intérêt pratique, par exemple dans l’étude de
la cinématique des solides en contact (cf. chapitre 16).
c Dunod – Toute reproduction non autorisée est un délit
EXERCICES ET PROBLÈMES
P3– 1. Mouvement d’un point du périmètre d’un disque
Un disque de rayon r tourne uniformément autour de son axe, à la vitesse angulaire V, dans le
sens indiqué sur la figure 3.9. Son centre C se déplace sur la droite horizontale z = r du plan vertical
Ozx du référentiel R = Oxyz. On appelle R∗ le référentiel Cxyz, en translation par rapport à R,
d’origine C, et on désigne par u l’angle que fait un rayon CA du disque avec Cz, A étant un point
de la périphérie.
1. Exprimer, dans la base de R, la vitesse et l’accélération de A par rapport à R ∗ .
2. Quelle vitesse, par rapport à R, doit-on donner à C pour que la vitesse v B/R du point le plus
bas du disque soit nulle ?
3. Trouver les équations x = x(u) et z = z(u) de A, sachant que, pour u = 0, x = 0 et z = 2r.
50
3. Changement de référentiel
y
h
z
z
R
µ
C
B
r
∗
AR
Ω
O
R
D
H R1
B
A
θ
C
x
O
x
F IG . 3.9.
F IG . 3.10.
P3– 2. Mouvement elliptique d’un point appartenant à une tige
Les extrémités d’une tige, de longueur l, se déplacent, respectivement, le long de l’axe Ox d’un
référentiel R = Oxyz et le long d’une droite D parallèle à l’axe Oy. La distance qui sépare D de Oy
est OH = h (Fig. 3.10). La position, dans le plan Oxy, d’un point quelconque A de la tige BC est
caractérisée par l’angle u = (−Oy, BC). On note b la distance AB.
1. Exprimer, en fonction de u, les coordonnées de C et A dans la base de R.
2. Quelles sont, dans la base de R, les composantes de v A/R et de v A/R 1 , R1 étant le référentiel,
d’origine B, en translation par rapport à R ? Trouver la vitesse d’entraînement de R1 par rapport à R.
3. Quelles sont, dans la base de R, les composantes de a A/R et de a A/R1 ? Trouver l’accélération
d’entraînement de R1 par rapport à R.
4. Montrer que la trajectoire de A est une ellipse et déterminer ses caractéristiques.
P3– 3. Mouvement d’un mobile sur un cercle en rotation
Un mobile A se déplace sur un cercle, de rayon R, qui tourne uniformément autour d’un diamètre
vertical, comme le montre la figure 3.11. On note u l’angle (Oz, OA) qui situe A sur le cercle et
ȧ = V la vitesse angulaire du repère R = Ox y z lié au cercle.
1. Exprimer, en fonction de u, la vitesse et l’accélération de A par rapport à R , dans la base de
Frenet.
2. Écrire, dans la base de R , la vitesse d’entraînement, l’accélération d’entraînement et l’accélération de Coriolis.
3. En déduire les expressions, dans la base de R , de la vitesse et de l’accélération de A par
rapport à R. Retrouver ces résultats directement à partir des composantes de OA dans la base de R .
z
V
A
µ
A
y
O
x
b
y
x
F IG . 3.11.
b
−u
Ω
B
F IG . 3.12.
u
b
51
Changement de référentiel
P3– 4. Vitesse d’éjection de l’eau dans un tourniquet hydraulique
Un tourniquet hydraulique, destiné à l’arrosage des jardins, est constitué de deux bras symétriques,
de longueur b, qui tournent autour d’un axe vertical avec la vitesse angulaire V. L’eau est éjectée par
les extrémités des bras avec une vitesse u, par rapport aux bras, qui fait un angle b avec la normale
aux bras (Fig. 3.12).
1. Trouver, en fonction de u, b et V, la vitesse de l’eau par rapport au référentiel terrestre R au
moment de l’éjection.
2. Quelles sont ses composantes radiale et orthoradiale ? Étudier le cas où V = u cos b/b.
P3– 5. Mouvement apparent d’un satellite artificiel
Dans le référentiel géocentrique Rg , la trajectoire d’un satellite artificiel S de la Terre est un
cercle de rayon r = 42 000 km contenu dans le plan TXY, l’axe TX coïncidant avec Tx 0 et l’axe
TY faisant l’angle u avec Ty 0 (Fig. 3.13). La trajectoire circulaire est décrite uniformément avec la
vitesse v.
1. Quelles sont les composantes de TS dans la base de TXYZ et dans celle de R = Txyz 0 lié à la
Terre ?
2. Le rapport v/r est égal à la vitesse de rotation propre de la Terre autour de l’axe des pôles.
Quelle est la trajectoire apparente de A pour un observateur terrestre (lié à R) ? À quelle condition le
satellite paraît-il fixe pour cet observateur ?
z0
Z
θ
S
Y
y
θ
T
y
B
O1
y0
x
y
Ωt
Oz
2Ω t
x
x
c Dunod – Toute reproduction non autorisée est un délit
X , x0
F IG . 3.13.
F IG . 3.14.
P3– 6. Système bielle-biellette
Une bielle OO 1, de longueur l, tourne uniformément autour d’un axe Oz avec une vitesse angulaire V par rapport au référentiel R = Oxyz. Une biellette O1B, de longueur moitié, tourne dans
le même plan que la biellette. Son mouvement est tel que (ex , O1B) = 2(e x , OO1 ) à chaque instant
(Fig. 3.14). Initialement les points O, O1 et B sont alignés sur l’axe Ox.
1. Exprimer, en fonction du temps, les composantes de OO 1 et de O 1 B dans la base de
R = Ox y z lié à la bielle.
2. Trouver la vitesse v B/R dans la base de R. Dans cette même base, écrire la vitesse d’entraînement ve de B dans le mouvement de R par rapport à R. En déduire vB/R projeté dans R .
52
3. Changement de référentiel
P3– 7. Durée du jour solaire moyen et durée du jour sidéral
La durée du jour solaire moyen est la durée T m qui sépare en moyenne deux positions successives
du Soleil au zénith dans son mouvement apparent. La durée du jour sidéral est la durée Ts qui sépare
deux positions successives d’une étoile éloignée dans son mouvement apparent.
Montrer que T m − T s = T2m /(Ta + T m), Ta étant la période de révolution de la Terre autour du
Soleil. Calculer Tm − Ts sachant que Tm = 24 × 3 600 = 86 400 s et T a = 365, 25 Tm .
P3– 8. Lunaison synodique et lunaison sidérale
La lunaison synodique est la durée T n qui sépare deux positions successives de la nouvelle Lune.
La lunaison sidérale est la durée Tl de révolution de la Lune autour de la Terre dans le référentiel
géocentrique.
Montrer que T n − T l = Tl2 /(Ta − Tl ), Ta étant la période de révolution de la Terre autour du
Soleil. Calculer Tn − Tl en jour, sachant que Tl = 27, 3 j et Ta = 365, 25 j.
P3– 9. Mouvement d’un point sur un disque lié à une tige en mouvement
Une tige T = OO 1, de longueur l = 40 cm, tourne dans le plan Oxy du référentiel R = Oxyz
avec la vitesse angulaire ẇ. Son extrémité O 1 est le centre d’un disque D de rayon r = 10 cm. On
souhaite analyser le mouvement d’un point A du pourtour de D. On repère sa position par l’angle u
que fait O 1A avec OO1. On désigne par R = O1x y z le référentiel lié à la tige, de centre O1 et tel
que l’axe Ox soit défini par OO1 (Fig. 3.15).
1. Donner les expressions vectorielles des vitesses vO 1 /R et vA/R . Exprimer ces vecteurs dans
la base de R .
2. En déduire, en fonction des angles et de leurs dérivées, les composantes de v A/R dans la base
de R.
3. Que deviennent ces composantes si u = 0 et u = p alors que u̇ = 0 ? Comparer les expressions obtenues à celle de la vitesse de O 1 par rapport à R.
4. Un mécanisme impose une vitesse nulle au point A si u = p. Établir la relation qui en résulte
entre u̇ et ẇ. Sachant que ẇ = 2 tr . min−1 , calculer u̇. En déduire la vitesse angulaire du disque par
rapport à R.
y
y1
A u
O1
D
T
w
O
x
F IG . 3.15.
x1
4
Dynamique du corpuscule
La dynamique est l’étude des mouvements des corps en relation avec les causes, appelées forces,
qui les produisent. Les lois physiques sur lesquelles elle s’appuie ont été énoncées partiellement par
G. Galilée en 1632 et complètement par I. Newton en 1687 dans le célèbre Principia mathematica.
On peut dire que la science, telle que nous la concevons aujourd’hui, commence avec ces lois
physiques de la mécanique énoncées par ces deux grands physiciens.
Dans ce chapitre, nous considérons d’abord les lois relatives au mouvement d’un corpuscule (corps
de petite dimension), connues sous les noms de 1 re et 2e lois de Newton. La première, ou principe de
l’inertie, a été énoncée pour la première fois par Galilée ; dans la deuxième, Newton introduit déjà le
concept de quantité de mouvement qui regroupe les notions de vitesse et de masse. La 3e loi de Newton,
ou loi d’opposition des actions réciproques entre deux corpuscules, joue un rôle essentiel dans l’étude
des systèmes de N corpuscules ou points matériels (cf. chapitre 13).
c Dunod – Toute reproduction non autorisée est un délit
Remarque : On s’accorde souvent pour définir la science comme le mode de pensée qui permet de
comprendre rationnellement le comportement de la nature à partir d’un petit nombre de
principes réfutables par les faits. La rationnalité de la pensée et la réfutabilité des principes
par les faits sont les caractéristiques qui singularisent l’activité scientifique par rapport aux
autres activités humaines (artistique, religieuse, etc.). Ces dernières ont cependant une
influence non négligeable dans les phases de création ou de transmission de la science.
I . — MASSE ET QUANTITÉ DE MOUVEMENT D’UN CORPUSCULE
I . 1 . — Masse inerte
L’Univers peut être considéré comme un ensemble de corpuscules. De tels éléments sont caractérisés :
– i) cinématiquement, par un seul vecteur vitesse et un seul vecteur accélération ; on ne distingue
donc pas les mouvements des différents points géométriques qui peuvent constituer de tels éléments ;
– ii) dynamiquement, par un scalaire positif appelé masse inerte, brièvement masse, qui est
constant (au cours du temps) et invariant (par changement de référentiel). On mesure la masse
d’un corpuscule en la comparant à celle d’un autre corpuscule prise comme unité : la comparaison se fait naturellement à partir des lois physiques où les masses interviennent. Comme nous le
verrons plus loin, dans la loi fondamentale de la dynamique, la masse inerte exprime une propriété particulière de la matière, l’inertie.
54
4. Dynamique du corpuscule
L’unité de masse dans le Système International est le kilogramme (kg) : c’est la masse d’un
certain cylindre en platine iridié, appelé prototype international du kilogramme.
Remarques : (1) Historiquement, les grands physiciens, Galilée, Newton, Euler, Maxwell, Boltzmann,
ont utilisé respectivement les mots projectile, corpuscule, corps ponctuel, particule, molécule, pour désigner le point matériel, lequel fut introduit par le mathématicien suisse
L. Euler en 1736 et en même temps la difficulté soulevée par une masse volumique infinie ! Dans la suite, on utilisera indistinctement ces différentes expressions.
(2) En mécanique newtonienne, m = 0 exprime l’absence de matière. Il n’en est
pas ainsi dans la théorie plus générale de la relativité où des corpuscules, de masse nulle,
peuvent avoir une énergie et une quantité de mouvement non nulles ; la masse perd alors
son statut de concept primaire (cf. Relativité et invariance).
(3) Le mot inerte exclut, pour le corpuscule, la présence de forces intérieures caractéristiques des systèmes matériels formés d’un ensemble de corpuscules, tels que les
systèmes vivants, par exemple.
I . 2 . — Quantité de mouvement d’un corpuscule
La quantité de mouvement est, pour un corpuscule A, de masse m et de vitesse v A/R par rapport
à un référentiel R, le vecteur :
p = mv A/R
Tout comme la vitesse, ce vecteur est défini par rapport à un référentiel.
Remarques : (1) Il n’est pas sans intérêt de noter que ce concept a été introduit initialement par
R. Descartes en 1645 et repris par Newton en 1687 dès les premières pages de son traité
Principia mathematica. Curieusement, dans l’enseignement français de la mécanique, on
substitue à tort à ce concept, à la fois moderne et historiquement important, celui moins
fondamental de quantité d’accélération ma A/R !
(2) En physique, on désigne souvent la quantité de mouvement par moment linéaire. Le
mot moment vient du latin momentum, qui est une contraction de movimentum (mouvement) et de movere (déplacer) ; on le qualifie de linéaire par opposition à angulaire. Ce
choix est naturel dans le contexte de la formulation lagrangienne ou hamiltonienne de la
mécanique où toutes les grandeurs traduisant un mouvement selon un axe ou autour d’un
axe sont appelées moments (cf. chapitre 24). On l’appelle aussi parfois impulsion, probablement en raison du rôle essentiel que joue p dans les collisions (cf. chapitre 14).
II . — LOI FONDAMENTALE DE LA DYNAMIQUE
II . 1 . — Référentiels galiléens
Pour formuler la loi fondamentale de la dynamique, il est nécessaire de considérer un référentiel,
c’est-à-dire un repère d’espace et un repère de temps. Le temps étant universel en mécanique de Newton,
il est judicieux de choisir un repère d’espace dans lequel la formulation de cette loi soit la plus simple
possible. Un tel référentiel est qualifié de galiléen.
Le référentiel du laboratoire, par rapport auquel les expériences quotidiennes sont conduites, peut
être considéré comme une bonne réalisation d’un référentiel galiléen. Dans la suite proche, nous nous
contenterons de ce résultat dont la justification est d’abord expérimentale. Nous verrons ultérieurement
que certains désaccords irréductibles entre théorie et expérience ont conduit à substituer au référen-
55
Dynamique du corpuscule
tiel du laboratoire d’autres référentiels réalisant une meilleure approximation d’un référentiel galiléen
(cf. chapitre 7).
Remarque : En cinématique galiléenne, on n’a attribué aucun caractère privilégié au référentiel d’étude
(cf. chapitre 3). Ce n’est que dans la recherche des causes du mouvement, c’est-à-dire dans
sa relation aux forces, que l’on est conduit à donner à ce référentiel un statut particulier,
galiléen ou non. Dans la théorie de la relativité d’Einstein, qui généralise celle de Galilée
et de Newton, il est nécessaire au contraire de préciser la nature physique des référentiels
dès la cinématique ; aussi dit-on que la relativité a fait entrer, en 1905, la cinématique dans
le domaine des sciences physiques.
II . 2 . — Forces ou interactions
Tout système matériel de l’Univers exerce sur un corps ponctuel A, non inclus dans ce système,
une force représentée, dans un référentiel galiléen R, par l’ensemble d’un point A et d’un vecteur F.
Exemples
Force de gravitation universelle
Un corps ponctuel A 1 subit de la part d’un autre corps ponctuel A 2 une force d’expression :
c Dunod – Toute reproduction non autorisée est un délit
F2→1 = −G
m ∗1m ∗2
er
r2
où
er =
r
et r = A 2 A1 = r 1 − r 2
r
La constante G = 6, 67 × 10−11 SI est la constante de Newton et les quantités scalaires positives m ∗1
et m∗2 sont les masses de gravitation de ces corpuscules (cf. chapitre 6). On montre, après analyse,
que ces masses peuvent être identifiées aux masses inertes m1 et m2 de A1 et A2 (cf. chapitre 7).
Cette force fut introduite par Newton pour interpréter le mouvement des planètes du système solaire (cf.
chapitre 13). Son expression est parfois appelée la cinquième loi de Newton.
La force de pesanteur ou poids d’un corps est une manifestation locale de la force de gravitation
(cf. chapitre 7). Pour l’instant, on admettra qu’on peut l’écrire sous la forme mg , où g est le champ
de pesanteur terrestre. La norme de g vaut, à Toulouse, g ≈ 9, 80 m . s−2 et sa direction définit la
verticale.
Force électromagnétique de Lorentz
Un système matériel constitué de charges électriques au repos ou en mouvement par rapport à un
référentiel galiléen R exerce, sur un corpuscule chargé électriquement A, une force :
F = q(E + v × B)
dans laquelle q est la charge électrique de A, E et B les champs électrique et magnétique produits
par le système et v la vitesse de A par rapport à R. Cette force est appelée la force de Lorentz
(cf. chapitre 8). Elle est bien plus intense que la précédente, comme le montre l’exemple suivant de
l’atome d’hydrogène ; le rayon de l’atome de Bohr étant aB ≈ 50 pm, on a :
F elec =
mpm e
1 e2
−8
=
G
≈
8
×
10
N
et
F
≈ 4 × 10−47 N
grav
2
2
4pε0 aB
aB
Forces nucléaires
Les forces nucléaires, fortes et faibles, permettent d’expliquer la cohésion des nucléons qui composent le noyau. Retenons simplement qu’elles sont 100 fois plus intenses que les forces électromagnétiques et de très courte portée (∼ 1 fm = 10−15 m), au point que leur domaine d’application se limite
au noyau.
56
4. Dynamique du corpuscule
Forces de contact
L’expérience courante montre que l’on décrit bien le mouvement d’un corpuscule, à l’échelle macroscopique, en tenant compte de forces supplémentaires de contact : les forces de frottement visqueux,
exercées par les fluides sur les corps en mouvement, de la forme −av ou −bv 2 (cf. chapitres 10
et 31) et les forces de frottement entre solides (cf. chapitres 9 et 19). Ces forces, qui jouent un rôle
important dans la vie pratique, sont dites non fondamentales, car elles n’apparaissent pas à l’échelon
microscopique.
II . 3 . — Loi fondamentale de la dynamique ou deuxième loi de Newton
a) Énoncés
Énoncé historique
Le changement de mouvement est proportionnel à la force imprimée et s’effectue suivant la droite
par laquelle cette force est imprimée.
Énoncé actuel
Par rapport à un référentiel galiléen R, le mouvement d’un corpuscule A, soumis à plusieurs
forces, dont la somme est
F, satisfait à la relation :
dp
=
dt
F
soit
m aA/R =
F
où m est sa masse inerte et p = mvA/R la quantité de mouvement de A par rapport à ce référentiel.
Remarque : La dérivée par rapport au temps est relative à la base du référentiel galiléen R. Si les
composantes de la quantité de mouvement p sont relatives à une autre base R , il est
indispensable d’utiliser la formule de Bour (cf. chapitre 3) :
dp
dt
=
R
dp
dt
R
+ VR /R × p
b) Inertie de la masse
La propriété qu’a la matière d’intervenir dans la loi fondamentale par sa masse s’appelle l’inertie,
car si deux corpuscules, initialement au repos dans R, sont soumis à la même force F, celui dont la
masse est la plus grande acquiert l’accélération la plus faible : son aptitude à s’opposer à l’effet de F
est donc plus grande ; on dit que son inertie est plus grande.
Remarques : (1) Il convient de distinguer la matière, qui caractérise les objets qui nous entourent, de sa
masse inerte, qui, elle, traduit l’une de ses propriétés, son inertie.
(2) Contrairement à ce que l’on pensait, avant la découverte en 2012 du boson H dit de
Higgs, la masse d’une particule apparaît désormais comme le résultat de son interaction
avec un champ particulier appelé champ H.
II . 4 . — Relativité galiléenne
Montrons que la loi fondamentale de la dynamique est invariante par changement de référentiel galiléen. Pour cela, considérons le mouvement d’un corpuscule A par rapport à deux référentiels galiléens
R et R . Comme les accélérations d’entraînement et de Coriolis, dans la composition des mouvements
entre R et R, sont nulles, on a aA/R = a A/R , d’où, en admettant l’invariance des forces par chan-
57
Dynamique du corpuscule
gement de référentiel :
F = maA/R
et
F = ma A/R
Ainsi, aucune expérience de mécanique ne permet de distinguer deux référentiels galiléens entre eux.
C’est bien ce que l’expérience courante nous apprend ; dans un véhicule (automobile, train, avion, bateau), se déplaçant à vitesse vectorielle constante par rapport au sol terrestre, il est impossible de déceler
notre état de mouvement, si l’on ne regarde pas à travers une fenêtre évidemment. Seules les modifications occasionnelles de cette vitesse, dans un virage ou au cours d’un freinage, sont détectables. Ce
résultat essentiel a été très tôt perçu par Galilée, en 1632, et résumé par la phrase bien connue : « le mouvement (rectiligne et uniforme) n’est rien ».
Cette invariance de la loi fondamentale en changeant de référentiel galiléen est appelée la relativité
galiléenne. Dans ce contexte, le référentiel de Copernic, souvent utilisé comme référentiel galiléen, n’est
qu’une excellente réalisation d’un référentiel galiléen parmi d’autres.
c Dunod – Toute reproduction non autorisée est un délit
Remarques : (1) La relativité galiléenne montre clairement que le concept d’espace absolu, introduit
initialement par Newton, n’a aucune justification scientifique. Il est surprenant qu’on le
trouve encore, dans certains ouvrages ou publications de mécanique newtonienne, alors
que, dans cette approximation, si le temps est absolu, l’espace est, lui, relatif, au sens où
la vitesse d’un corpuscule dépend du référentiel d’étude. La seule vitesse qui soit absolue,
au sens de l’invariance par changement de référentiel galiléen est la vitesse de la lumière
dans le vide, laquelle sort précisément du champ de la mécanique newtonienne.
(2) L’invariance galiléenne dépasse le cadre de la mécanique newtonienne. En effet, Einstein la généralisa en 1905 à tous les phénomènes physiques, ce qui permit de résoudre
l’important problème posé par la constatation expérimentale de l’invariance de la vitesse
de la lumière dans le vide (cf. Relativité et invariance).
Exemple : chute libre
La chute libre des corps dans le voisinage de la surface de la Terre a été étudiée complètement par
Galilée. C’est lui qui le premier a montré que deux corps, suffisamment denses pour rendre négligeable
l’influence de l’air, que l’on abandonne sans vitesse de la même hauteur, devaient atteindre le sol en
même temps.
C’est lui aussi qui montra l’influence des conditions initiales sur la nature de la trajectoire du
mouvement d’un corps : elle est rectiligne si le corps est abandonné sans vitesse et parabolique s’il est
lancé avec une vitesse initiale perpendiculaire à la verticale du lieu.
Pour établir ce résultat, appliquons par rapport au référentiel terrestre la loi fondamentale de la
dynamique à un corps ponctuel soumis à la seule force de pesanteur m g :
ma = mg
d’où
a=g
ce qui s’explicite selon : ẍ = 0 et ÿ = −g. Dans le cas de la chute libre d’une hauteur h , on a :
gt2
+h
2
Dans ce contexte, il est instructif de citer le célèbre problème posé par Galilée dans le Dialogue des deux
mondes : quel est le point de chute d’un boulet abandonné au sommet du mât vertical d’un voilier, qui
se déplace à vitesse (vectorielle) constante par rapport au référentiel terrestre, si on néglige l’influence
de l’air (Fig. 4.1) ? Le point situé au bas du mât, en avant ou en arrière ?
Comme le référentiel du voilier possède les mêmes propriétés que le référentiel terrestre et que,
dans ce dernier, tout corps abandonné sans vitesse a une trajectoire verticale, la réponse est le point situé
au bas du mât.
ẋ = Cte = 0
d’où
x = Cte = 0 et
ẏ = −gt + Cte = −gt
d’où
y=−
58
4. Dynamique du corpuscule
Remarques : (1) Le résultat précédent n’est pas intuitif, comme le prouvent les réponses erronnées
données même par des personnes instruites.
(2) On montre qu’en réalité on doit ajouter une force supplémentaire appelée la force de
Coriolis terrestre dont l’influence peut être ici négligée (cf. chapitre 7).
(3) Soulignons bien que cette chute, indépendante de la masse, n’est vraie que si l’influence de l’air peut être négligée ; en dehors de cette hypothèse, la chute dépend de la
masse, car la force de frottement n’est pas, elle, proportionnelle à la masse.
y
R (Voilier)
y
u
R (Terre)
O
O
x
(Mer)
x
F IG . 4.1.
II . 5 . — Application à la mesure des forces
La preuve de l’existence d’une force est donnée par la non-observation du principe de l’inertie. On
constate qu’en présence de corps étrangers à un corpuscule A, la quantité de mouvement de ce dernier
n’est pas constante. La relation d p/ d t = F devient alors une relation permettant de déterminer la force
inconnue F. C’est ainsi que Newton a pu établir, à partir de données observationnelles en astrophysique,
que la force de gravitation était inversement proportionnelle au carré de la distance des corps ponctuels
en interaction.
Très souvent, on mesure F par la variation de la déformation d’un système, tel qu’un ressort dont
on a fixé une extrémité. Il est nécessaire dans ce cas d’étalonner préalablement le ressort. On réalise
ainsi un dynamomètre. L’unité SI de force est le newton (N).
II . 6 . — Contenu physique des deux premières lois de Newton
Les deux premières lois de Newton font intervenir simultanément plusieurs concepts : l’espace, le
temps, des référentiels privilégiés, la masse inerte d’un corpuscule et la somme des forces qu’exerce son
environnement sur lui. Elles peuvent donc servir à déterminer l’une de ces grandeurs si les autres sont
connues. Cependant, la deuxième loi exprime dans le cas général l’égalité entre le taux de variation de
la quantité de mouvement d’un corpuscule et la somme des forces qui s’exercent sur lui ; au préalable,
chacune de ces forces a pu être étudiée avec soin indépendamment des autres, en considérant un autre
corps ponctuel dont la quantité de mouvement s’est trouvée modifiée à la suite de son intervention.
Lorsque l’étude expérimentale du mouvement ne coïncide pas avec les prévisions théoriques, comment doit-on modifier la loi fondamentale ? Seule une analyse physique du problème permet de répondre. On doit se demander :
i) si le système étudié est bien défini, car on a pu oublier une interaction,
ii) si l’échelle de temps est suffisamment précise,
iii) si le repère utilisé est une bonne réalisation d’un repère galiléen,
iv) si l’expression des forces est correcte.
59
Dynamique du corpuscule
Compte tenu de la précision des mesures, le temps fourni par les physiciens n’est pas en cause.
D’autre part, on hésite à modifier les expressions des forces que des considérations de symétrie et de
simplicité, voire d’élégance, ont permis d’établir, et que des expériences ont par ailleurs confirmées.
L’erreur la plus fréquente est celle due à un mauvais choix de référentiel galiléen. C’est historiquement ce qui s’est passé : on s’est aperçu que certains désaccords disparaissaient lorsqu’on adoptait
comme référentiel galiléen un référentiel lié au système stellaire et non un référentiel lié à la Terre ;
c’est ainsi qu’on a pu expliquer la déviation vers l’est, le comportement du célèbre pendule de Foucault, l’existence de deux marées par jour, etc. (cf. chapitre 7).
Certaines divergences entre les résultats expérimentaux et les prévisions n’ont pas pu être attribuées
aux causes précédentes, notamment quand les forces d’interaction étaient d’origine électromagnétique
ou lorsque les vitesses n’étaient pas négligeables devant la constante d’Einstein (vitesse de la lumière
dans le vide) qui vaut environ 300 000 km . s−1. Elles n’ont pu être expliquées que par la théorie de
la relativité restreinte élaborée par Einstein en 1905 dans laquelle les bases de la cinématique, et par
conséquent la loi fondamentale, sont différentes. On a toujours :
dp
=
dt
F
mais p = gmv
où
v2
g= 1− 2
c
−1/2
est le facteur relativiste (cf. Relativité et invariance).
III . — PRINCIPE DE L’INERTIE
Ce principe de l’inertie, connu aussi sous le nom de première loi de Newton, a été énoncé en réalité
pour la première fois par Descartes en 1644 (Newton n’avait que deux ans).
III . 1 . — Énoncés historique et actuel
a) Énoncé historique
c Dunod – Toute reproduction non autorisée est un délit
On peut lire dans les premières pages du traité de Newton :
« Tout corps persévère dans son état de repos ou de mouvement rectiligne uniforme, sauf si des
forces imprimées le contraignent d’en changer. »
b) Énoncé actuel
(
Par rapport à tout référentiel galiléen R , tout corps ponctuel A , éloigné de tout autre corps,
F = 0) , a un mouvement rectiligne uniforme : v = Cte .
En effet, d’après la deuxième loi de Newton, si
dp
=0
dt
d’où
p = Cte
F = 0 , alors :
et
v = Cte
Notons que la vitesse et la quantité de mouvement sont alors des constantes vectorielles : le mouvement
de A est rectiligne et uniforme, ce qui caractérise un corpuscule soumis à une force nulle. Le repos
correspond évidemment à une valeur nulle de la vitesse.
60
4. Dynamique du corpuscule
Remarques : 1) C’est dans Principe des choses matérielles que l’on trouve l’énoncé de Descartes du
principe de l’inertie sous sa forme définitive, avec mouvement rectiligne et uniforme.
Ajoutons, pour l’anecdote, que, dans son énoncé original, Descartes associait explicitement la conservation de la vitesse d’un corps ponctuel isolé à l’immuabilité de Dieu !
Galilée, lui, n’avait, comme ses prédécesseurs, considéré que les mouvements circulaires
uniformes en omettant le caractère rectiligne pourtant essentiel dans le principe de l’inertie.
2) Dans ce contexte, il n’est pas inutile de rappeler l’erreur historique d’Aristote, selon
lequel « Il n’y a pas de mouvement (vitesse) sans moteur (force) ».
3) En dernière analyse, comme l’a fait remarquer le physicien autrichien Ernst Mach (prononcez « mar »), cette première loi de Newton n’est qu’une conséquence de la loi fondamentale de la dynamique, lorsque le corps ponctuel n’est soumis à aucune force.
c) Corpuscule isolé et corpuscule pseudo-isolé
On distingue parfois un corpuscule isolé, car soumis à aucune force ( F = 0 ), d’un corps ponctuel
pseudo-isolé, soumis lui à un ensemble de forces dont la somme est nulle :
F=0.
d) Équilibre mécanique
Un corpuscule, isolé ou pseudo-isolé, est dit en équilibre ou au repos par rapport à un référentiel
galiléen si sa vitesse est nulle, ce qui suppose que sa vitesse initiale soit nulle. En effet :
F=0
d’où
v = Cte = 0
Par exemple, une masselotte A , soumise à son poids mg et à la tension T d’un fil, est en équilibre si :
mg + T = 0
et v = 0
III . 2 . — Référentiel inertiel
Un référentiel est qualifié d’inertiel, si on peut y réaliser le principe de l’inertie.
C’est le cas, pour le référentiel du laboratoire, si la pesanteur n’est pas prise en compte, parce que
négligeable dans ses effets, ou compensée par une autre force ; référentiel du laboratoire et référentiel
inertiel coïncident alors.
Une table à coussin d’air, qui permet de compenser la pesanteur par la réaction normale qu’exerce
de l’air soufflé par la table, est un référentiel galiléen, qui est aussi inertiel à deux dimensions. Nous
verrons ultérieurement (cf. chapitre 7) qu’une cabine d’ascenseur en chute libre ou un vaisseau spatial
sans propulsion réalisent tous deux un référentiel inertiel à trois dimensions, mais non galiléen.
De façon générale, le référentiel du laboratoire est galiléen, avec une excellente approximation,
mais il n’est pas inertiel, pour tout mouvement à trois dimensions, précisément en raison de la pesanteur
qui empêche d’y réaliser le principe de l’inertie.
Remarque : La plupart des auteurs ne font pas de distinction entre les référentiels inertiels et les référentiels galiléens.
61
Dynamique du corpuscule
IV . — MOMENT CINÉTIQUE
IV . 1 . — Définition
On appelle moment cinétique d’un corpuscule A, par rapport à un référentiel R, en un point O
de R, le moment de sa quantité de mouvement :
LO = OA × p = OA × mvA
Remarques : (1) Le moment cinétique est parfois appelé moment angulaire, ce qui est naturel dans le
contexte de la formulation lagrangienne ou hamiltonienne (cf. chapitre 24).
(2) En France, le moment cinétique est encore souvent noté par la lettre s ; en adoptant L,
nous nous sommes conformés à une recommandation internationale.
IV . 2 . — Théorème du moment cinétique
Si on dérive L O/R par rapport au temps, relativement à R, supposé galiléen, il vient :
d LO
d OA
dp
dp
=
× p + OA ×
= OA ×
= OA ×
dt
dt
dt
dt
F
d’où :
d LO
=
dt
MO
Ce résultat, qui pour un corpuscule est une conséquence de la loi fondamentale, s’énonce ainsi :
La dérivée par rapport au temps du moment cinétique d’un corpuscule, en un point fixe O d’un
référentiel galiléen, est égale à la somme des moments des forces qui s’exercent sur lui.
Remarque : Évidemment, comme pour la loi fondamentale, la dérivée par rapport au temps est relative
à la base du référentiel galiléen R. Si les composantes du moment cinétique sont relatives
à une autre base R , il est indispensable d’utiliser la formule de Bour (cf. chapitre 3) :
c Dunod – Toute reproduction non autorisée est un délit
d LO
dt
=
R
d LO
dt
R
+ V R/R × LO
Ce théorème est très commode lorsque le moment des forces est nul. On obtient alors immédiatement une constante vectorielle du mouvement : L O/R = Cte (cf. chapitre 12).
Nous avons supposé que le point O était fixe par rapport à R. Étudions le cas où le moment
cinétique est calculé en un point O mobile dans R galiléen. Comme L O/R = O A × mv A/R , il
vient, en dérivant par rapport au temps, relativement à R :
d L O /R
dp
= vA/R − vO/R × mvA/R + OA ×
dt
dt
En un point mobile O de R, le théorème du moment cinétique s’écrit donc :
d LO/R
+ vO/R × m vA/R =
dt
M O
Retenons que si le point où l’on applique le théorème du moment cinétique est mobile, il faut ajouter à
la dérivée du moment cinétique le terme complémentaire v O /R × m vA/R .
62
4. Dynamique du corpuscule
Remarque : Le premier membre de l’équation précédente s’identifie au moment dynamique au point
mobile O (cf. chapitre 18).
V . — MOUVEMENTS RECTILIGNES ET MOUVEMENTS PLANS
A priori, la position d’un corpuscule dans l’espace dépend de trois paramètres indépendants, par
exemple les coordonnées cartésiennes (x, y, z), les coordonnées cylindriques (r, w, z), etc. On dit que
le corpuscule considéré a trois degrés de liberté. Nous verrons ultérieurement, lorsque le corps est guidé
(cf. chapitre 9), que ce nombre diminue sous l’effet de liaisons qui lui sont imposées : contact sur une
surface, évolution sur une ligne matérielle, etc.
En l’absence de liaison, le mouvement d’un corpuscule peut être rectiligne ou plan si certaines
conditions sont réalisées. C’est ce que nous nous proposons d’analyser.
V . 1 . — Mouvements rectilignes
a) Somme des forces et vitesse initiale parallèles
F des forces qui s’exercent sur le corpuscule considéré est constamment parallèle
Si la somme
à une direction fixe D et si la vitesse initiale v 0 est parallèle à D ou nulle, la trajectoire est parallèle
à D.
Pour établir ce résultat, il suffit de projeter la loi fondamentale dans une base du référentiel telle
que ez coïncide avec D. Suivant les autres axes, on trouve :
ẍ = 0
ÿ = 0 d’où
ẋ = Cte = 0
ẏ = Cte = 0
Il en résulte en intégrant que x = Cte et y = Cte.
Dans le cas singulier où la vitesse v 0 est nulle, on obtient le même résultat puisque seule change
la vitesse initiale suivant l’axe des z.
b) Somme des forces et vitesse initiale centrales
F et la vitesse initiale v 0 sont centrales, c’est-à-dire passent par un point O fixe,
Si la somme
la trajectoire est la droite définie par ce point et la vitesse initiale v 0 .
En effet, le moment de F étant nul, le moment cinétique L O = OA × mv est une constante nulle,
puisqu’initialement vitesse et vecteur position sont colinéaires. Il en résulte qu’à tout instant ultérieur
cette propriété demeure : la trajectoire est donc rectiligne.
V . 2 . — Mouvements plans
a) Somme des forces et vitesse initiale parallèles à un plan fixe
F des forces qui s’exercent sur le point matériel et la vitesse initiale v 0 sont
Si la somme
parallèles à un plan fixe du référentiel, le mouvement est plan.
En effet, en projetant la loi fondamentale sur un axe OX perpendiculaire à ce plan, on trouve :
mẌ = 0 d’où
Ẋ = Cte = 0 et X = Cte
63
Dynamique du corpuscule
b) Force centrale
Si la somme
F passe par un pôle O, autrement dit si la somme des forces est centrale, le
moment cinétique est un vecteur constant.
En effet :
d LO
= OA × F = 0
dt
d’où
LO = OA × mv A = Cte
Il en résulte que la vitesse et le vecteur position sont constamment perpendiculaires au vecteur L O :
v A · LO = 0 et
OA · L O = 0
Le mouvement de A est donc contenu dans un plan.
V . 3 . — Méthode d’application de la loi fondamentale
Pour appliquer la loi fondamentale de la dynamique en minimisant le risque d’erreur, il est préférable de procéder selon une démarche déterminée que nous allons illustrer sur l’exemple d’un point
matériel lancé, à la surface de la Terre, avec une vitesse initiale v 0 (Fig. 4.2).
y
v0
Oz
g
θ0
xl
x
F IG . 4.2.
c Dunod – Toute reproduction non autorisée est un délit
a) Définition du système
Définissons le système en le distinguant de son environnement par une surface fermée qui le
contient. Ici le système est simple puisqu’il se réduit au corpuscule considéré.
Notons que nous avons évité l’expression « Isolons le système », laquelle pourrait laisser supposer
que l’on procède à une suppression des forces auxquelles le point matériel est soumis de la part de son
environnement.
b) Nature galiléenne du référentiel R
Le référentiel d’analyse R est le référentiel terrestre. Comme nous le verrons ultérieurement (cf.
chapitre 7), ce référentiel est une bonne réalisation d’un référentiel galiléen, pourvu que l’on introduise
la notion de poids et que la vitesse ne soit pas trop grande afin de négliger la force de Coriolis terrestre.
c) Bilan des forces
Le poids mg (cf. chapitre 7) et la résistance de l’air de la forme : −a v avec a > 0 ; cette dernière
est une force de frottement visqueux proportionnelle à la vitesse (cf. chapitres 10 et 31).
64
4. Dynamique du corpuscule
Remarque : Dans le bilan des forces, on doit prendre en compte les seules forces qui apparaissent dans
la phase du mouvement considérée. Ainsi les forces éventuelles, qui sont à l’origine de la
position et de la vitesse du point à l’instant initial, ne sont pas à prendre en compte. Les
informations contenues à l’instant initial jouent cependant un rôle décisif, comme nous le
verrons lorsque nous utiliserons les conditions initiales pour déterminer de façon précise
la nature de la trajectoire.
d) Expression vectorielle de la loi fondamentale
L’application de la loi fondamentale donne : ma A/R = mg − av soit a A/R = g − v/t en
introduisant le coefficient t = m/a, homogène à une durée. Notons que nous avons évité une écriture
répandue, bien que malheureuse, constituant à écrire d’emblée la force de frottement sous la forme
−mv/t , ce qui laisserait penser qu’elle serait proportionnelle à la masse, alors que cette proportionnalité
est la propriété exceptionnelle de la force de gravitation (cf. chapitre 7).
e) Projections sur une base
Explicitons, dans une base orthonormée directe, généralement la plus commode (ici, celle liée à
R), l’équation vectorielle précédente. Il vient, puisque l’axe Oy est vertical ascendant :
0
ẍ
ẋ
1
ÿ = −g −
ẏ
t
0
z̈
ż
d’où les trois équations : ẍ + ẋ/t = 0, ÿ + ẏ/t = −g et z̈ + ż/t = 0
f) Résolution des équations différentielles
Les équations suivant x et z sont identiques. La première s’écrit :
vx
ẋ
= 0 soit v̇ x +
=0
t
t
En cherchant une solution de la forme vx = Cte × exp(rt), on trouve r + 1/t = 0. Par conséquent :
t
v x = v0 cos u0 exp −
t
car, pour t = 0, vx = v0 cos u 0. En intégrant, on obtient :
t
t
+ Cte = v0t cos u 0 1 − exp −
x = −v 0t cos u0 exp −
t
t
puisque, pour t = 0, x = 0. Comme à l’instant initial, on a : ż0 = 0 et z0 = 0, alors z = 0. Le
mouvement est donc contenu dans le plan Oxy.
Quant à l’équation en y , il suffit, pour la résoudre, d’ajouter à la solution générale précédente la
solution particulière évidente : vy = −gt. Par conséquent :
ẍ +
v y = Cte × exp −
t
− gt
t
À t = 0, vy = v 0 sin u0 = Cte − gt. D’où :
t
− gt
t
En intégrant une nouvelle fois et en faisant y0 = 0, on obtient :
v y = (v 0 sin u 0 + gt) exp −
y = −gtt + t(v0 sin u0 + gt) 1 − exp −
t
t
65
Dynamique du corpuscule
g) Analyse physique du résultat
Lorsque t devient très grand, v x et vy tendent vers des valeurs limites : (vx )l = 0 et (vy )l = −gt
Quant à x et y, ils valent respectivement : (x) l = v 0t cos u 0 et (y)l = −gt t
Enfin, si t t, on retrouve les résultats bien connus :
x ≈ v0 t cos u0 1 − 1 +
et
y ≈ −gt t + t(v 0 sin u 0 + gt) 1 − 1 +
t
t
= v0 cos u0 t
t
t2
− 2
t 2t
≈−
gt 2
+ v 0 sin u0 t
2
La trajectoire peut changer considérablement d’allure, selon les conditions initiales :
i) Dans le cas général, c’est une courbe, précisément une parabole si la force de frottement est nulle
(a = 0 ou t = ∞.)
ii) Pour v 0 = 0, u0 = p/2 ou u0 = −p/2, c’est une droite verticale.
Remarque : On aura noté la nécessité d’avoir deux types de constantes pour intégrer les équations différentielles issues de l’application de la loi fondamentale : les unes concernent la position (x, y), les autres la vitesse (ẋ, ẏ). Physiquement, cela correspond à la définition de
l’état mécanique du point à l’instant initial, lequel exige la connaissance de la position
(où est le point ?) et de la quantité de mouvement (où va-t-il ?). L’espace des états mécaniques d’une particule, ou espace des phases, est donc a priori à 6 dimensions (cf. chapitres 10 et 24).
VI . — TROISIÈME LOI DE NEWTON
c Dunod – Toute reproduction non autorisée est un délit
La troisième loi de Newton, ou principe de l’opposition des actions réciproques entre deux corpuscules, permet de passer de la mécanique du corpuscule à celle des systèmes (cf. chapitre 13). Nous
verrons plus tard (cf. chapitre 18) qu’il est possible de bâtir la mécanique des systèmes à partir d’une
axiomatique plus forte qui restitue cette troisième loi sous forme de théorème.
VI . 1 . — Énoncés historique et actuel
Énoncé historique
La réaction est toujours contraire à l’action, ou encore les actions que deux corps exercent l’un sur
l’autre sont toujours égales (en norme) et dirigées en sens contraires.
Énoncé actuel
Si un corpuscule A1 exerce sur un autre corpuscule A 2 une force F1→2 , A2 exerce sur A1 la
force opposée :
F2→1 = −F 1→2
Exemple : Dans le cas de la gravitation, on a :
F2→1 = −F1→2 = −
Gm ∗1m∗2
er avec
r2
er =
r
r
et r = A2 A1
66
4. Dynamique du corpuscule
VI . 2 . — Application à la comparaison des masses
L’opposition des actions réciproques permet d’établir un résultat important relatif à un système de
deux corpuscules soumis à leurs seules actions mutuelles. Des relations :
d p1
= F2→1 et
dt
d p2
= F 1→2
dt
on déduit :
d
(p + p2 ) = 0 soit p1 + p2 = Cte
dt 1
Donc, la quantité de mouvement d’un système isolé de deux corpuscules est une constante vectorielle.
Ce résultat fournit une méthode de comparaison de masses. En effet, on peut écrire, relativement à R,
la relation suivante entre deux instants t et t :
p 1 + p2 = p1 + p2
soit
m1v1 + m2 v2 = m 1 v1 + m2v2
en utilisant les notations habituelles. On en déduit :
m2
v − v1
= 1
m1
v2 − v2
CONCLUSION
(1) La loi fondamentale de la dynamique permet d’étudier tout problème de mécanique du corpuscule connaissant les forces qui s’exercent sur lui. Relativement à un référentiel galiléen, elle s’écrit :
dp
=
dt
F
soit
ma =
F
puisque
p = mv
Son application fournit, dans le cas général, trois équations différentielles du deuxième ordre qu’il faut
résoudre pour connaître le type de mouvement. La difficulté relève alors de la seule technique mathématique. Les constantes introduites par cette dernière résolution sont déterminées de manière non ambiguë
par les conditions particulières du mouvement, le plus souvent initiales, qui portent sur la position et sur
la vitesse. Une fois le mouvement déterminé, il convient de vérifier les prévisions théoriques en s’aidant de l’expérience ou à défaut de son intuition newtonienne.
(2) Dans certains cas, il est commode d’appliquer le théorème du moment cinétique, lequel est
directement issu de la loi fondamentale appliquée au corpuscule considéré :
d LO
=
dt
MO
avec
LO = OA × p
L O et p étants relatifs au référentiel d’étude.
(3) Rappelons que les dérivées par rapport au temps de la quantité de mouvement et du moment
cinétique sont relatives au référentiel d’analyse R. Si ce n’est pas le cas, il faudra utiliser la composition
des dérivations de Bour.
(4) Le domaine d’application de la loi fondamentale est très large. Ses limitations sont définies par :
i) les vitesses non négligeables devant c ≈ 3 × 10 8 m . s −1 (cf. Relativité et invariance),
i) l’échelle atomique, 1 nm ∼ 10 −9 m, (cf. Quantique).
67
Dynamique du corpuscule
EXERCICES ET PROBLÈMES
P4– 1. Mouvement d’une fusée
Une fusée, assimilée à un corps ponctuel, de masse 1 200 t, est soumise à une force de propulsion
de 32 kN et à une résistance de l’air atmosphérique égale à 9, 6 kN (Fig. 4.3). Sa vitesse est de
3 km . s −1 et le champ de gravitation G, à l’altitude considérée, est de 6 m . s −2 . L’angle que fait la
vitesse avec ce champ est 30◦ . Calculer le rayon de courbure de la trajectoire.
y
30◦
G
O
x
F IG . 4.3.
P4– 2. Influence de la taille d’un athlète au lancé du poids
Un athlète, de hauteur h bras levé, lance le « poids » (masse égale à 7, 26 kg), le plus loin possible
avec une vitesse initiale de valeur v0 fixée.
1. Établir la relation entre l’angle a m qui réalise le meilleur lancer, h et la coordonnée horizontale
xm du point de chute.
2. En déduire l’expression de am en fonction de h, v0 et g, intensité du champ de pesanteur.
3. Étudier l’influence de h sur x m. Calculer x m pour : v0 = 13, 5 m . s −1 avec d’abord
h = 2, 2 m, puis h = 2, 7 m.
c Dunod – Toute reproduction non autorisée est un délit
P4– 3. Expérience de Millikan
On observe le mouvement rectiligne et uniforme, suivant la verticale, d’une gouttelette de glycérine A, sphérique, de rayon r ; la gouttelette est soumise à son poids et à une force de frottement
visqueux, donnée par la loi de Stokes (cf. chapitre 31) :
Ff = −6p h r v
où
h = 1, 8 × 10 −5 SI
est la viscosité de l’air (cf. chapitre 31). En l’absence de champ électrique, A tombe à la vitesse
vl = 0, 392 mm . s−1. En présence d’un champ électrique uniforme et constant E, de direction verticale, de norme E = 400 kV . m−1 , la gouttelette remonte. On donne la masse volumique de l’huile :
r = 810 kg . m−3 .
1. Montrer que la vitesse suivant la verticale tend vers une vitesse limite en l’absence de E. On
posera 1/t = 6phr/m. Calculer r.
2. Que devient la vitesse en présence de E ?
3. Une observation prolongée montre que la vitesse subit, par instant, des variations brusques. On
mesure, en particulier, les valeurs suivantes exprimées en mm . s−1 :
v1 = 0, 270
v 2 = 0, 080
v3 = 0, 175
v4 = 0, 363
v5 = 0, 458
68
4. Dynamique du corpuscule
Des mesures analogues ont permis au physicien américain R. Millikan de conclure, en 1911, à l’existence d’une charge élémentaire et de déterminer la valeur de cette dernière, ce qui lui valut le prix Nobel
en 1923. Retrouver cette charge à partir des données précédentes.
P4– 4. Mouvement d’un point soumis à une force résistante en v2
Une bille sphérique, de masse m = 30 g, de rayon r = 1 cm, est abandonnée dans le champ de
pesanteur terrestre. Elle est soumise, de la part de l’air, à une force de freinage (la traînée), opposée à la
vitesse, d’expression (cf. chapitre 31) : Ff = CxrSv 2/2, où S est la surface de la projection de la bille
dans un plan perpendiculaire à la vitesse, r la masse volumique de l’air et Cx un facteur de résistance
de l’air.
1. On introduit v l tel que mg = C x Srv2l /2. Écrire l’équation différentielle à laquelle satisfait la
vitesse v.
2. Trouver comment évolue v. Quelle est la signification de v l ? Représenter graphiquement v(t).
P4– 5. Mouvement d’un point soumis à une force résistante en v1/2
Une bille, de masse m, en mouvement suivant un axe horizontal Ox, est soumise à une force de
frottement proportionnelle à la racine carrée de la vitesse : F = −b v 1/2 ex. Sa vitesse initiale est v 0 ex .
Quelle est l’équation différentielle à laquelle satisfait la vitesse v ? En déduire l’expression de
v(t). À quel instant t1, en fonction de m, b et v0 , la vitesse s’annule-t-elle ? Représenter graphiquement v(t).
5
Énergétique du corpuscule
Nous allons déduire de la loi fondamentale de la dynamique un théorème faisant intervenir des
grandeurs scalaires, telles que la puissance d’une force, le travail, l’énergie cinétique, l’énergie potentielle et l’énergie mécanique d’un corpuscule.
Le point de départ est la simple multiplication scalaire par le vecteur vitesse v des deux membres
de l’égalité vectorielle qui exprime la deuxième loi de Newton :
dp
·v=
dt
F·v
soit
mv ·
dv
=
dt
F·v
I . — PUISSANCE ET TRAVAIL D’UNE FORCE
Considérons, dans un référentiel R, un corpuscule A, de vitesse v, soumis à une force F
(Fig. 5.1).
z
v
A
dr
F
c Dunod – Toute reproduction non autorisée est un délit
O
x
R
er
y
O
F IG . 5.1.
A
r
dr
F IG . 5.2.
I . 1 . — Puissance
Par définition, la puissance d’une force F s’exerçant sur le corpuscule A, ou puissance reçue par
A par l’intermédiaire de F, est :
P = F·v
soit
P = Fx ẋ + F y ẏ + F z ż
en coordonnées cartésiennes. Comme la vitesse, la puissance d’une force F dépend du référentiel dans
lequel elle a été calculée. Certaines forces ont une puissance nulle :
i) la force magnétique, qui s’exerce sur une charge ponctuelle plongée dans un champ magnétique
stationnaire B :
P = q(v × B) · v = 0
70
5. Énergétique du corpuscule
ii) la force de Coriolis (cf. chapitre 7), qui s’exerce sur un corpuscule si le référentiel considéré
n’est pas galiléen :
P = −2m(V × v) · v = 0
Plus généralement, la puissance d’une force quelconque est nulle pour tout déplacement normal à la
direction de cette force. Ainsi, la puissance du poids d’un corps est nulle pour tout déplacement dans un
plan horizontal, puisque le poids est vertical (cf. chapitre 7).
Si P > 0, la puissance est motrice ; si P < 0, elle est résistante. L’unité SI de puissance est le
watt (W), du nom de l’ingénieur écossais J. Watt. L’ancienne unité, encore utilisée, le cheval-vapeur,
vaut 736 W.
Évidemment, si plusieurs forces sont appliquées au même corpuscule A, la puissance résultante
est la somme des puissances de toutes les forces :
P = (F 1 + F 2 + · · · ) · v = F 1 · v + F2 · v + · · ·
Remarque : Bien que relative à un référentiel, la puissance P = F · v peut être calculée à l’aide des
composantes des vecteurs F et v dans n’importe quelle base vectorielle.
Exemples
i) Puissance du poids mg : P = mg · v = −mg ż, Oz étant l’axe vertical ascendant. Ainsi, la
puissance du poids d’une masse de 1 kg, qui tombe en chute libre, avec une vitesse de 5 m . s −1 au
niveau du sol, est :
P = mg · v = mgv = 49 W
ii) Puissance d’une force centrale (Fig. 5.2)
Comme F = Fr e r où r = OA et e r = r/r, il vient :
P = Fr
r dr
dr
= Fr
= F rṙ
·
dt
r dt
car l’équation r2 = r2 donne r · d r + d r · r = 2r d r en différentiant, soit r · d r = r d r .
iii) Puissance d’une force de frottement visqueux F = −a v avec a > 0 :
P = −av · v = −av 2 < 0.
I . 2 . — Travail
a) Expression élémentaire
Par définition, le travail élémentaire de la force F qui s’exerce sur un corpuscule A est :
dW = P d t = F · v d t = F · d OA
puisque d OA = v d t est le déplacement élémentaire de A dans le référentiel R par rapport auquel la
vitesse est comptée. La notation d indique que dW n’est pas a priori la différentielle d’une certaine
fonction. Exprimons dW à l’aide de la base de R :
dW = F x d x + Fy d y + F z d z
En raison de la relation simple existant entre dW et P, les remarques faites sur la puissance sont
valables aussi pour dW. L’unité SI de travail est le joule (J), du nom du physicien anglais J. Joule.
Remarque : La lettre W, utilisée pour désigner le travail, vient du mot anglais work.
71
Énergétique du corpuscule
b) Travail au cours d’un déplacement fini
Le travail de F au cours d’un déplacement fini s’obtient en intégrant l’expression précédente :
F x d x + F y d y + Fz d z
W=
i) Dans le cas général et peu fréquent où F dépend à la fois de la position du point A, de sa vitesse
et du temps, l’intégrale n’est calculable qu’une fois x, y et z connus en fonction du temps, et donc
qu’une fois le mouvement connu. On a alors, entre ti et t f les instants initial et final :
tf
W=
ti
[Fx (r, v, t) ẋ + Fy (r, v, t) ẏ + Fz(r, v, t) ż] d t
Exemple : Soit, en unité SI, F tel que F x = 3 x + ẋ t/2 + 1, Fy = −5 z + 2 t2 + ẏ t, Fz = 10 x + 3,
avec x = t 2 + 1, y = 2t2, z = t 2 . Le travail, entre les instants t 1 = 0 s et t 2 = 1 s, se calcule en
exprimant toutes les quantités en fonction du temps :
1
W=
0
2
3
1
2
[8 t(t + 1) − 12 t + 2t(10t + 13)] d t =
(16 t 3 + 34 t) d t = 4 t 4 + 17 t 2
0
1
0
= 21 J
ii) Si la force ne dépend que de la position r , le travail se présente sous la forme d’une intégrale
curviligne que l’on calcule le long de la trajectoire C du point d’application de la force, entre ses
positions initiale et finale Ai et A f :
W=
C
F(r) · d OA =
Fx(x, y, z) d x + Fy (x, y, z) d y + F z(x, y, z) d z
C
Le travail est ici défini pour un parcours déterminé indépendamment de la manière dont ce parcours est
effectué au cours du temps.
Exemple : Soit F, tel que F x = 3 x, F y = −5 z, Fz = 10 x, en unités SI, et la trajectoire C
définie par y = 2x 2 et z = 0. Entre x = 0 et x = 1, on obtient, puisque z = 0 :
1
W=
0
3x dx =
3x2
2
1
= 1, 5 J
0
c Dunod – Toute reproduction non autorisée est un délit
iii) Un troisième cas encore plus particulier présente un intérêt majeur, puisqu’il est à l’origine du
concept d’énergie potentielle associée à une force. Il sera étudié un peu plus loin. Là, le travail ne dépend
pas de la trajectoire entre les positions Ai et A f , mais seulement de ses positions initiale et finale.
II . — ÉNERGIE CINÉTIQUE
II . 1 . — Définition
Le concept d’énergie cinétique s’introduit naturellement lorsqu’on effectue le produit scalaire
F · v. En effet :
d 1 2
dp
dv
mv + Cte
F·v =
·v= m
·v=
dt
dt
dt 2
Ainsi, ce produit scalaire se met sous la forme de la différentielle de la fonction mv 2 /2 + Cte. Par
convention, la constante est choisie égale à 0 et on appelle énergie cinétique Ek/R , par rapport au
référentiel R , la quantité scalaire non négative suivante, liée à la vitesse :
Ek =
1 2
mv
2
72
5. Énergétique du corpuscule
Remarques : (1) Nous avons noté l’énergie cinétique par la lettre cursive E k et non par la lettre droite
E k afin de distinguer l’énergie cinétique de la norme du champ électrique E. On pourra
utiliser cette dernière lettre lorsqu’il n’y aura aucun conflit de notation.
(2) Le mot énergie, qui vient de energia, mot grec signifiant force en action, a été introduit
par T. Young (cf. Thermodynamique) en 1802.
(3) Le double de l’énergie cinétique, mv 2 , a été introduit par Leibniz, en 1691, sous le
nom de « force vive », à l’époque où la différence entre force et énergie n’était pas encore
clarifiée.
II . 2 . — Théorème de l’énergie cinétique
Il vient, d’après la loi fondamentale :
d Ek/R
=P
dt
soit
d Ek/R = dW
ou
DEk/R = W
après intégration. Ainsi :
La dérivée par rapport au temps de l’énergie cinétique d’un corpuscule est égale à la puissance de
toutes les forces appliquées, ou la variation d’énergie cinétique d’un corpuscule est égale au travail de
toutes les forces appliquées.
Remarques : (1) Comme nous le verrons au chapitre 7, si R n’est pas galiléen, il faut ajouter à la
puissance des forces appliquées celle de la force d’inertie d’entraînement, celle de la force
de Coriolis étant toujours nulle.
(2) Le théorème de l’énergie cinétique est particulièrement adapté aux systèmes dont la
position est définie par un seul degré de liberté, puisqu’il ne fournit qu’une seule équation
scalaire.
(3) En multipliant scalairement par v les deux membres de l’équation vectorielle qui exprime la loi fondamentale de la dynamique, on introduit naturellement la solution supplémentaire v = 0 qui n’existait pas nécessairement. Aussi cette solution ne présente-t-elle
aucun intérêt.
II . 3 . — Exemple d’application : le pendule simple
Une masselotte A, de masse m, glisse sans frottement sur un guide circulaire vertical, de rayon l
(Fig. 5.3). On repère sa position par l’angle u que fait OA avec la verticale descendante, O étant
l’origine du référentiel terrestre R .
g
y
Oz
l
θ
Guide circulaire
R
x
A
F IG . 5.3.
En vue d’appliquer le théorème précédent dans le référentiel d’analyse R = Oxyz, exprimons, en
fonction du paramètre u, l’énergie cinétique et la puissance des différentes forces :
Ek/R =
1 2 2
ml u̇
2
Pmg = mg · v = −mglu̇ sin u
et P R = R · v = 0
73
Énergétique du corpuscule
puisque la réaction R du guide est, en l’absence de frottement, perpendiculaire à la tangente au guide
(cf. chapitre 9). Le théorème de l’énergie cinétique donne donc :
d(ml 2u̇ 2/2)
= −mglu̇ sin u
dt
ml 2u̇ü = −mglu̇ sin u
soit
et
ü +
g
sin u = 0
l
en simplifiant par ml2 u̇, ce qui revient à exclure la solution parasite u̇ = 0. La résolution de cette
équation n’est simple que dans le cas des petits mouvements ; on trouve alors, puisque sin u ≈ u :
ü + v20 u = 0 avec v20 =
g
l
ce qui est caractéristique d’un mouvement sinusoïdal de période T0 = 2p/v 0 = 2p(l/g) 1/2 .
Remarque : L’équation du mouvement peut être obtenue aussi à l’aide du théorème du moment cinétique, appliqué au point fixe O par lequel passe la réaction R. Il vient, le moment en O
de cette force étant nul :
d(ml2 u̇ ez)
= OA × mg = −mgl sin u e z
dt
III . — ÉNERGIE POTENTIELLE
III . 1 . — Définition
Il arrive fréquemment que le travail d’une force F, qui s’exerce sur un corpuscule A, ne dépende
pas du chemin suivi par son point d’application A, mais seulement des positions initiale A i et finale
Af de ce point. C’est le cas de toutes les forces fondamentales de la physique ! On écrit alors :
W = Ep (ri ) − E p(rf )
c Dunod – Toute reproduction non autorisée est un délit
où E p(r), avec r = OA, est une fonction de position, appelée l’énergie potentielle, selon la recommandation faite par l’ingénieur écossais J. Rankine (cf. Thermodynamique).
Le travail élémentaire d’une telle force se met alors sous la forme de l’opposé de la différentielle
(totale, exacte) de la fonction énergie potentielle :
dW = F · d r = − d Ep (r)
En coordonnées cartésiennes, d E p a pour expression, si Fx , Fy et F z sont les composantes de F :
− d E p = F x d x + Fy d y + Fz d z
d’où
Fx = −
∂Ep
∂x
Fy = −
∂Ep
∂y
Fz = −
∂Ep
∂z
On condense souvent les trois équations précédentes en introduisant l’opérateur vectoriel grad appelé
gradient (cf. annexe 3) :
F = − grad E p
L’énergie potentielle Ep est définie à une constante additive près sans intérêt. Dans les cas réels
d’interaction du corpuscule A avec le système S qui exerce la force, l’origine naturelle de l’énergie potentielle est prise lorsque A et S sont infiniment éloignés.
74
5. Énergétique du corpuscule
Dans les modèles où il est souvent commode de considérer la force comme un vecteur uniforme,
la constante additive ne peut être prise égale à 0 à l’infini. Aussi, dans ce cas, prend-on comme origine
un point arbitraire.
Remarques : (1) Le concept d’énergie potentielle, tel qu’il a été défini ici comme fonction explicite
des seules variables de position, trouve sa pleine justification physique dans l’existence
d’une grandeur, l’énergie mécanique, qui se conserve si le corps ponctuel n’est soumis
qu’à la force associée à cette énergie potentielle. C’est précisement parce qu’on voulait
faire apparaître l’énergie mécanique sous la forme d’une somme de contributions qu’on a
préféré la forme dW = − d E p(r) avec le signe moins.
(2) Compte tenu du choix de la constante, l’énergie potentielle peut être positive ou négative, alors que la convention admise pour l’énergie cinétique rend cette dernière non
négative, une fois pour toutes.
III . 2 . — Définition opérationnelle de l’énergie potentielle
On donne souvent une autre définition de l’énergie potentielle en faisant intervenir un opérateur.
Ce dernier exerce la force Fop sur le point A, lequel est soumis en outre, de la part d’un système S, à
la force F qui dérive de l’énergie potentielle Ep et à une force occasionnelle de frottement.
Appliquons le théorème de l’énergie cinétique à A, entre une position infiniment éloignée de S et
la position considérée. Il vient, en adoptant comme origine des énergies potentielles celle correspondant
à A et S infiniment éloignés :
DEk = W (F) + Wop + W f = −DE p + W op + Wf = −(E p − 0) + Wop + Wf
d’où :
Ep = −DEk + W op + Wf
Wf désignant le travail des forces de frottement éventuelles. Ainsi :
Ep = Wop
si
DEk = 0 et W f = 0
Pour que W f soit nul, il faut que la vitesse de A soit très faible et qu’il n’y ait pas de frottement solide
(cf. chapitre 9).
L’énergie potentielle associée à la force qu’exerce le système S sur A est donc aussi le travail que
doit fournir un opérateur pour amener A de l’infini à la position considérée, au cours d’un déplacement
sans frottement et sans variation d’énergie cinétique.
En pratique, ces conditions sont réalisées si la norme de la force F op est infiniment voisine de celle
de F et s’il n’y a pas de frottement solide.
III . 3 . — Exemples d’énergie potentielle
a) Énergie potentielle de pesanteur
Dans le cas de la force de pesanteur qui est mg, on a (Fig. 5.4) :
dW = mg · d r = d(mg · r) = − d E p
d’où
Ep = −mg · r + Cte
Si conventionnellement, Ep est nulle pour r = 0, la constante est nulle et :
Ep = −mg · r
75
Énergétique du corpuscule
En général, on retient l’expression précédente sous sa forme explicitée dans la base cartésienne dans
laquelle l’axe Oz désigne la verticale ascendante (cf. chapitre 7), c’est-à-dire l’axe dirigé et orienté
selon −g. Il vient, puisque g = −g ez avec g = 9, 80 m . s−2 et r a pour composantes x, y, z :
E p = mg ez · r soit Ep = mgz.
L’énergie potentielle de pesanteur est positive si le point est au-dessus de O et négative sinon, ce
qui est conforme à l’augmentation de l’énergie potentielle lorsque la distance qui sépare le point A de
la Terre augmente. Dans l’exemple du pendule simple (Fig. 5.3), l’énergie potentielle de pesanteur a
pour expression : Ep = mgz = −mgl cos u.
z
g
A
mg
O
g
y
A
O
x
x
F IG . 5.4.
F IG . 5.5.
Remarque : Il n’est pas inutile de préciser que, si la verticale avait été prise descendante, on aurait eu
Ep = −mgz.
b) Énergie potentielle élastique due à un ressort de raideur K et de longueur à vide l0
Calculons le travail élémentaire de la force −K (x − l 0 ) ex (Fig. 5.5) :
dW = −K (x − l0 ) d x = − d Ep
d’où
1
E p = K (x − l 0)2 + Cte
2
Si l’on convient que l’énergie potentielle est nulle pour x = l 0, alors Cte = 0 d’où, en introduisant
l’allongement X = x − l 0 :
1
1
Ep = K (x − l0 )2 = KX2
2
2
c Dunod – Toute reproduction non autorisée est un délit
c) Énergie potentielle newtonienne ou coulombienne
Cette énergie potentielle est celle associée aux forces newtonienne ou coulombienne qui sont de la
forme (Fig. 5.6), K étant la constante de l’interaction :
OA
K
F = 2 er où er =
r
r
Si K > 0, l’interaction est répulsive ; c’est le cas de la force de Coulomb entre des charges électriques de mêmes signes (cf. Électromagnétisme). En revanche, si K < 0, l’interaction est attractive ; il
en est ainsi pour la force entre les charges électriques de signes opposés et la force de gravitation.
Calculons le travail élémentaire de cette force. Il vient, puisque r · d r = r d r :
dW = F ·d r =
Ke r
K
K
K
·d r = 3 r ·d r = 3 r d r = 2 d r = d
2
r
r
r
r
−K
r
= − d Ep
Conventionnellement, on pose Ep(r) = 0 à l’infini ; alors, Cte = 0 et :
Ep =
K
r
avec
Ep (r) =
K
+Cte
r
76
5. Énergétique du corpuscule
z z
H
ω
z
O
er
A
F
x
y
R
x
A
y
O
ωt
F IG . 5.6.
x
P R
y
F IG . 5.7.
d) Énergie potentielle centrifuge
Si le référentiel d’analyse R n’est pas galiléen et qu’il tourne uniformément autour d’un axe fixe
d’un référentiel galiléen R (Fig. 5.7), on montre qu’il apparaît deux forces supplémentaires, la force
d’inertie de Coriolis qui ne travaille pas et la force d’inertie d’entraînement centrifuge d’expression :
mV2 HA, V étant le vecteur vitesse de rotation constant de R par rapport à R (cf. chapitre 7). Le
travail de cette dernière s’écrit :
dW = mV2 HA · d OA = mV 2HA · d HA = − d Ep
avec E p = −
mV 2 2
HA + Cte
2
Si Ep est nulle sur l’axe, alors Cte = 0 et :
Ep = −
mV2 2
HA
2
ce qui s’écrit aussi
Ep = −
m
2
(V × r)
2
puisque HA 2 = (e z × r)2 . Notons que cette expression suppose que la rotation soit uniforme.
Remarque : La puissance de la force magnétique étant nulle, l’énergie potentielle associée peut être
prise égale à 0. Il en est de même pour la force de Coriolis (cf. chapitre 7).
IV . — ÉNERGIE MÉCANIQUE
Distinguons, dans les forces qui s’exercent sur un corps ponctuel A, celles F (c) qui dérivent d’une
énergie potentielle Ep de celles F(nc) qui n’en dérivent pas. Le travail élémentaire de toutes les forces
peut alors se mettre sous la forme :
dW = dW (c) + dW (nc) = − d E p + dW(nc)
dW (c) = − d Ep étant le travail des forces, dites conservatives, qui dérivent d’une énergie potentielle et
dW(nc) le travail des forces, dites non conservatives, qui ne dérivent pas d’une énergie potentielle. On
obtient, en appliquant le théorème de l’énergie cinétique :
d E k = − d E p + dW (nc)
soit
d(Ek + E p) = dW (nc)
77
Énergétique du corpuscule
IV . 1 . — Théorème de l’énergie mécanique
Le résultat précédent, issu du théorème de l’énergie cinétique, suggère d’introduire le concept
d’énergie mécanique Em d’un corpuscule, somme de son énergie cinétique E k et de son énergie potentielle Ep :
Em = Ek + E p
Il en résulte le théorème de l’énergie mécanique :
d Em
= P(nc)
dt
La dérivée par rapport au temps de l’énergie mécanique est égale à la puissance des forces qui ne
dérivent pas d’une énergie potentielle.
Ce théorème s’écrit aussi :
d Em = dW (nc) d’où
DE m = W (nc)
en intégrant ; dW(nc) = P (nc) d t est le travail élémentaire correspondant et W (nc) le travail total associé.
c Dunod – Toute reproduction non autorisée est un délit
Remarques : (1) On notera la différence entre énergie et travail : le premier concept est une fonction
d’état, caractéristique de l’état du système, contrairement au second : la fonction travail
W (nc) n’existe pas.
(2) L’énergie potentielle E p caractérise l’interaction du corpuscule A avec le système S
qui exerce la force F. Ce concept ne doit donc pas être associé au seul corpuscule A mais
au système {S, A}. C’est probablement pour cette raison que certains auteurs n’associent
une énergie potentielle qu’aux seules forces intérieures d’un système qui dérivent d’une
énergie potentielle. Le point de vue adopté ici est moins restrictif : il s’appuie sur la seule
justification du concept d’énergie qui est la recherche d’une grandeur dite conservative,
c’est-à-dire qui ne peut être créée. Cette démarche historique s’est achevée avec le premier
principe de la thermodynamique (cf. Thermodynamique).
(3) On comprend pourquoi les physiciens ont préféré le concept d’énergie potentielle à celui de fonction de force U = −Ep introduit par les mathématiciens : l’énergie mécanique
se met sous la forme d’une somme de deux contributions qui s’ajoutent.
IV . 2 . — Cas où l’énergie mécanique se conserve
De façon générale, l’énergie mécanique ne se conserve pas, puisque P (nc) = 0. Si, occasionnellement, les seules forces qui travaillent dérivent d’une énergie potentielle, P (nc) = 0, l’énergie mécanique se conserve :
E m = Ek + E p = Cte
si
P(nc) = 0
La constante est déterminée par les conditions initiales du mouvement. Cette conservation occasionnelle
de l’énergie mécanique fournit une équation différentielle du premier ordre, contrairement au théorème
de l’énergie cinétique. Pour cette raison, on l’appelle parfois l’intégrale première de l’énergie.
Remarque : Les forces qui dérivent d’une énergie potentielle sont appelées forces conservatives. On
comprend désormais pourquoi : lorsqu’elles interviennent seules, l’énergie du corpuscule
se conserve.
78
5. Énergétique du corpuscule
IV . 3 . — Discussion qualitative d’un mouvement conservatif à un degré de liberté
L’équation de conservation de l’énergie mécanique d’un corpuscule, soumis uniquement à des
forces conservatives qui travaillent, s’avère très intéressante dans la résolution des problèmes à un degré de liberté, notamment lorsque l’intégration des équations différentielles est délicate. En effet, cette
équation se prête bien à une discussion qualitative souvent suffisante. Comme Em = E k + E p = Cte, les
seuls mouvements possibles sont ceux pour lesquels :
Ek = Em − Ep 0
On représente alors graphiquement Ep(q) en fonction du seul degré de liberté q (Fig. 5.8) ; les mouvements possibles sont ceux qui réalisent Em Ep .
Ep
Em
État libre
O q1
E 0
q 2 q0
q3
q 0
q4
q
État lié
E0
État libre
F IG . 5.8.
Supposons que E p (q) ait l’allure représentée sur la figure 5.8 : pour q = q0, l’énergie potentielle
passe par une valeur minimale E0 et, pour q = q0, elle passe par une valeur maximale E 0 . On distingue
plusieurs types de mouvement :
i) E m E0 ; les seuls mouvements possibles sont ceux pour lesquels q > q1 , q1 étant défini par
E m = Ep . Comme le corpuscule peut s’éloigner indéfiniment du centre de force, cet état est dit libre.
ii) E 0 < Em < E0 ; suivant la valeur initiale q i de q, le mouvement est tel que q2 q q 3 ou
q > q4 . Dans le premier cas, l’état est dit lié ou confiné car le corpuscule reste toujours dans une région
déterminée de l’espace. Dans le second, il est libre.
iii) E m = E 0 ou Em = E0 . Il en résulte que q = q 0 ou q = q0 ; le mouvement est stationnaire en
q. L’état est ici aussi lié.
On peut montrer que le premier mouvement stationnaire est stable, alors que le second est instable :
dans le premier cas, toute légère perturbation du corpuscule provoque un mouvement d’oscillation autour de la position d’équilibre q0 ; dans le second, la perturbation provoque une accentuation de l’écart
par rapport à q0. En effet, un développement autour de q 0 donne :
Ep (q) = Ep(q0 ) +
q − q0
1!
d Ep
dq
+
0
(q − q 0)2
2!
en remarquant que (d Ep / d q) 0 = 0 et en posant :
mouvement est donc, en première approximation :
d2 Ep
d q2
0
+ · · · = E0 +
d 2 Ep/ d q2
0
K (q − q0 )2
+ ···
2
= K. L’équation différentielle du
1 2
1
A q̇ + E0 + K (q − q0 )2 = E m
2
2
Deux cas se présentent suivant le signe de K.
i) K > 0. L’équation traduit l’oscillation de q autour de la valeur d’équilibre q 0 , avec la pulsation
v0 = (K /m) 1/2 (cf. chapitre 10). En effet, en dérivant cette équation par rapport au temps, on obtient
79
Énergétique du corpuscule
bien l’équation différentielle du deuxième ordre caractéristique :
d2 Q
+ v 20Q = 0 avec Q = q − q 0
d t2
et v 0 =
K
m
1/2
Ainsi, l’équilibre est stable si l’énergie potentielle est minimale.
ii) K < 0. L’équation différentielle à laquelle satisfait Q = q − q 0 est :
d2 Q
− a2 Q = 0
d t2
avec
a=
|K |
m
1/2
ce qui est caractéristique d’une augmentation de Q au cours du temps. L’équilibre est donc instable si
l’énergie potentielle est maximale.
Remarques : (1) Cette discussion était autrefois conduite à partir de l’équation q̇2 = f (q). La forme
canonique qui s’appuie sur le concept fondamental d’énergie mécanique a évidemment la
faveur des physiciens.
(2) Notons que cette discussion qualitative, bien que très intéressante, reste insuffisante
pour analyser l’état mécanique d’un corpuscule, lequel est déterminé par l’ensemble du
degré de liberté q, qui donne sa position, et de sa dérivée q̇ ; précisément, l’état est défini
par q et son moment conjugué p, proportionnel à q̇ (cf. chapitre 24).
CONCLUSION
1) Rappelons les différentes formes du théorème de l’énergie cinétique :
c Dunod – Toute reproduction non autorisée est un délit
d Ek
=P
dt
d Ek = P d t = dW
et
DEk = W
2) Il est préférable d’écrire ce théorème sous des formes à la fois plus générales et plus efficaces en
faisant apparaître l’énergie mécanique Em , somme de l’énergie mécanique Ek et de l’énergie potentielle
Ep :
d Em
= P (nc)
d Em = P (nc) d t = dW (nc)
et
DEm = W (nc)
dt
(
nc
)
(
nc
)
P
et W
étant la puissance et le travail des forces qui ne dérivent pas d’une énergie potentielle.
(3) On détermine l’énergie potentielle associée à une force en calculant son travail élémentaire
dW . Si, entre deux positions extrêmes Ai et Af , le travail W ne dépend pas du chemin suivi, alors, on
peut écrire W = Ep(A i) − E p(A f). En d’autres termes, si dW est une différentielle (totale, exacte), on
pose dW = − d Ep .
(4) L’application du théorème de l’énergie pour un corpuscule présente un intérêt multiple :
i) on manipule des quantités scalaires et non des vecteurs, lesquels exigent des bases d’expression,
ii) si les seules forces qui travaillent dérivent d’une énergie potentielle, l’énergie mécanique se
conserve. Cette conservation de l’énergie mécanique se prête bien à une discussion qualitative très instructive et très précieuse, notamment quand le système ne possède qu’un seul degré de liberté et que
l’intégration s’avère techniquement délicate, voire impossible.
Aux chapitres 13 et 20, nous généraliserons ces résultats au cas des systèmes de points et de solides.
Le premier principe de la thermodynamique élargit ce concept en introduisant celui d’énergie totale d’un
système (cf. Thermodynamique).
80
5. Énergétique du corpuscule
EXERCICES ET PROBLÈMES
P5– 1. Forces et énergies potentielles
On considère les trois champs de force suivants :
F1 = ay e x
F 2 = ax e x + by e y et F3 = a(y ex + x e y)
a et b étant des constantes, et (x, y) les composantes du vecteur position dans un plan Oxy. Ces
champs de forces dérivent-ils d’une énergie potentielle ? Si oui, laquelle ?
P5– 2. Conservation de l’énergie dans un puits d’énergie potentielle radiale
Une particule A, de masse m, est soumise à une force centrale de la forme F = (K/r n) e r, où K
et n sont des constantes et e r le vecteur unitaire porté par le vecteur position r. Elle est initialement
immobile pour r = r0 et sa vitesse en r = 0 est v 0.
1. Donner l’expression de son énergie potentielle.
2. Montrer, à partir de l’énergie, que l’on doit avoir n < 1 et K < 0.
P5– 3. Mouvement d’une particule dans un champ de force en r −3
Une particule A (masse m) est soumise de la part d’un centre O à une force F = (K/r 3) er , K
étant une constante, r = OA et er = r/r.
1. Donner l’expression de l’énergie potentielle E p(r), sachant que E p est nul pour r infini.
2. En calculant le moment cinétique en O, montrer que le mouvement est plan. On note Oxy ce
plan. Exprimer en coordonnées polaires (r, w) le moment cinétique et l’énergie cinétique.
3. Montrer que le mouvement suivant r satisfait à l’équation différentielle :
1 2
m ṙ + Ep,ef = Em
2
Em étant l’énergie mécanique de A et Ep,ef un terme énergétique que l’on écrira sous la forme
E p,ef = K /r2, K étant une constante que l’on déterminera en fonction de m, K et du carré du
moment cinétique.
4. Les conditions initiales sont r 0 = 0 et ṙ0 = 0. Pour K = 0, quelle est la variation de r en
fonction du temps ?
5. On considère le cas général où K = 0. Exprimer, en fonction de s = r2, l’équation différentielle précédente. En déduire l’équation différentielle du deuxième ordre à laquelle satisfait s. Quelle
est alors la relation entre r et t en fonction de Em , m, r0 et ṙ 0 ?
6. Représenter graphiquement r en fonction de t pour ṙ0 = 0 dans les deux états suivants : l’état
lié défini par Em < 0 et l’état libre défini par Em > 0. Trouver, en fonction de m, r 0 et E , la durée
au bout de laquelle A dans l’état lié atteint le point O.
P5– 4. Mouvement d’une particule soumise à une force de puissance constante
Une particule A (masse m) a un mouvement rectiligne suivant un axe horizontal Ox. Elle est
soumise à l’action d’une force de puissance constante P et à une force due à la résistance de l’air dont
la norme a pour expression bmv 2. Elle part du repos en x = 0 pour t = 0 dans le sens des x positifs.
1. Trouver l’expression de l’abscisse x en fonction de la vitesse v. Montrer que la vitesse tend
vers une limite vl que l’on déterminera en fonction de P, b et m.
81
Énergétique du corpuscule
2. Étudier la limite de x lorsque b tend vers 0.
3. Application numérique : m = 900 kg, P = 60 kW et v l = 144 km . h−1 . Quelle est la valeur
de b ? Au bout de quelle distance, A aura-t-il atteint la vitesse vl /2 ?
P5– 5. Analyse énergétique d’un oscillateur harmonique dans le champ de pesanteur terrestre
Un oscillateur mécanique est constitué d’une masselotte A, de masse m, accrochée à l’extrémité inférieure d’un ressort vertical, de raideur K et de longueur à vide l0. On néglige les forces de
frottement.
1. Appliquer le théorème de l’énergie mécanique. On désignera par x la coordonnée fixant la
position de A, le long de la verticale descendante, à partir de l’origine O prise à l’extrémité supérieure
du ressort.
2. Exprimer l’énergie potentielle en fonction de la variable X = x − l 1 , où l1 est la position
d’équilibre de A.
P5– 6. Aspect énergétique de la force de frottement de Stokes
Une particule (masse m) est soumise à l’action d’une force dérivant de l’énergie potentielle E p et
de la force de frottement de Stokes FS = −av (cf. chapitre 31).
1. Établir la relation entre l’énergie cinétique, l’énergie potentielle et l’énergie D dissipée par la
force de frottement, qui est l’opposée du travail de cette force.
2. La particule est une fine gouttelette d’eau, de masse m = 0, 9 × 10 −15 kg, abandonnée (sans
vitesse initiale). Le coefficient de la force de frottement est a = 2 × 10−10 N . s . m−1 .
a) Montrer que la particule atteint pratiquement une vitesse limite v l au bout d’une faible durée
que l’on estimera. Calculer cette vitesse limite en m . s −1.
b) Quelle est la perte d’énergie D de cette fine gouttelette d’eau lorsqu’elle est descendue d’une
hauteur h = 1 km ?
P5– 7. Fronde de longueur variable
c Dunod – Toute reproduction non autorisée est un délit
La trajectoire d’une fronde, constituée d’une masselotte A (masse m = 100 g) attachée à un fil
de longueur l , est un cercle horizontal, de centre O et de rayon l0 = 1 m , parcouru avec une vitesse
uniforme v 0 ; le fil de la fronde passe dans un tube vertical de très faible diamètre, placé en O (Fig. 5.9).
1. a) La fronde effectue 5 tours par seconde. Comparer la tension du fil au poids de A . Commenter.
b) Déterminer les valeurs de la vitesse, du moment cinétique en O et de l’énergie cinétique de A .
2. On fait varier l en tirant sur son extrémité inférieure qui émerge du tube.
a) Que deviennent le moment cinétique et l’énergie cinétique ?
b) Calculer la vitesse de A et son énergie cinétique lorsque la longueur du fil de la fronde est
réduite de moitié. En déduire le travail de la force de traction en appliquant le théorème de l’énergie
cinétique. Retrouver ce résultat à partir de la tension.
O
l
A
T
Tube vertical
g
E
F op
F IG . 5.9.
6
Gravitation.
Propriétés du champ de gravitation
La force de gravitation est l’une des quatre forces fondamentales de la physique. Elle fut introduite
en 1687 par Newton pour interpréter le mouvement des planètes (cf. chapitre 12), le mouvement de la
Lune et le mouvement des corps dans le voisinage de la Terre. Malgré le formidable succès de cette
interprétation, le sujet reste d’actualité en raison du rôle décisif joué par la gravitation en astrophysique,
notamment depuis l’analyse de cette interaction faite par Einstein en 1916 dans le cadre de la relativité
générale.
Traditionnellement, on présente la gravitation en soulignant la ressemblance entre la force gravitationnelle et la force électrostatique entre deux particules chargées. C’est ce que nous ferons au cours du
développement en nous appuyant sur les résultats établis en électrostatique (cf. Électromagnétisme).
I . — FORCE DE GRAVITATION
Entre deux corpuscules A 1 et A 2, de masses inertes respectives m1 et m2, la force de gravitation
qu’exerce A2 sur A 1 a pour expression :
F(2g→) 1 = −G
m ∗1m ∗2
er
r2
où
er =
r
et r = A 2 A1 = r 1 − r 2
r
La constante de gravitation G vaut : G ≈ 6, 67 × 10 −11 SI (Fig. 6.1) ; sa valeur a été testée avec
une précision relative de 10 −4. Les quantités scalaires m ∗1 et m ∗2 , qui traduisent la capacité de deux
masses à s’attirer, sont les masses de gravitation ou masses graves. On montre (cf. chapitre 7) que les
masses graves sont égales aux masses inertes m 1 et m 2, lesquelles, rappelons-le, traduisent une autre
propriété, celle qu’ont les corps de résister à leur mise en mouvement par des forces (cf. chapitre 4).
La force électrostatique, établie expérimentalement par le physicien français C. Coulomb en 1785,
a une forme analogue ; une particule, de charge électrique q2 , exerce sur une seconde particule de
charge q 1 la force (cf. Électromagnétisme) :
)
F(2e→
1 =
1 q1 q2
er
4pε 0 r 2
avec
1
≈ 9 × 10 9 SI
4pe0
Les constantes G et 1/(4pe0) donnent une idée du rapport considérable de ces forces : la force électrostatique est, en ordre de grandeur, 1039 fois plus intense que la force de gravitation.
83
Gravitation. Propriétés du champ de gravitation
Notons une autre différence : alors que la force électrostatique peut être attractive ou répulsive, la
force gravitationnelle est uniquement attractive.
En raison de la même dépendance par rapport à r, ces forces présentent des propriétés identiques.
Nous établissons ces propriétés dans le cas de la gravitation, celles du champ électrostatique étant bien
connues (cf. Électromagnétisme). Pour retrouver ces dernières, il suffira de remplacer les masses par les
charges électriques et la constante G par −1/(4pε0 ).
Remarques : (1) Souvent le vecteur r est défini autrement : r = A1A 2 = r2 − r1 , ce qui ne change
rien à l’analyse.
(2) Les limites d’application de la forme en 1/r 2 de la force de gravitation concernent les
faibles distances (inférieures à 50 mm ).
z
z
A2
r
r2
r1
O
Pi
A1
Ri
ri
y
r
O
x
A
y
x
F IG . 6.1.
F IG . 6.2.
II . — CHAMP ET POTENTIEL DE GRAVITATION
Soit un système déformable S d de corpuscules {Pi } de masses graves {m ∗i } et de positions
{ri = OPi }. Ce système exerce sur un autre corpuscule A, de masse grave m∗ , repéré par r = OA ,
une force F égale à la somme vectorielle des forces exercées par chacun des éléments Pi (Fig. 6.2) :
F=
c Dunod – Toute reproduction non autorisée est un délit
i
FP i→A = −Gm∗
i
m ∗i
Pi A2
P iA
Pi A
= −Gm ∗
i
m∗i
R 2i
Ri
Ri
avec
R i = P iA = r − r i
II . 1 . — Champ de gravitation G
Par définition, le champ de gravitation G produit par l’ensemble S des points matériels est la
force de gravitation qu’exerce S sur A par unité de masse :
G=
F
= −G
m∗
i
m ∗i
P iA 2
Pi A
= −G
Pi A
i
m∗i
R2i
Ri
Ri
Si la distribution de masse est continue, on introduit la masse grave r ∗ d
de l’élément de volume
d entourant un point générique P, r ∗ étant la masse grave volumique. D’où l’intégrale sur le volume
occupé par les masses :
PA ∗
R ∗
r d = −G
r d
G = −G
3
3
V PA
V R
84
6. Gravitation. Propriétés du champ de gravitation
II . 2 . — Potentiel de gravitation F
Évaluons le travail élémentaire dW de la force F exercée sur le corpuscule A par l’ensemble
{Pi } fixe, lorsque A se déplace de d r. Comme les vecteurs r i sont fixes :
d r = d Ri
et dW = F · d r = F · d R i = −Gm∗
i
Ri
Ri
m∗i
R2i
· d R i = −m ∗G
i
m∗i
d Ri
R2i
puisque R i · d Ri = Ri d Ri . Il en résulte que :
dW = −m ∗ G
1
m∗i d −
Ri
i
=d
m∗ G
i
m ∗i
Ri
avec
R i = PiA
Ainsi, dW se présente sous la forme d’une différentielle (totale, exacte) : la force F dérive donc d’une
énergie potentielle de gravitation Ep :
dW = − d Ep
avec
Ep = −m∗ G
m∗i
+ Cte
Ri
i
Par définition, le potentiel de gravitation F est l’énergie potentielle par unité de masse grave :
F=
Ep
= −G
m∗
i
m ∗i
+ Cte
Ri
Comme E p, F est défini à une constante additive près, que l’on fixe en choisissant une origine des
potentiels. Il est naturel de poser Ep = 0 pour des masses infiniment éloignées les unes des autres ; la
constante est alors nulle :
F = −G
i
m ∗i
Pi A
ou
F = −G
V
r∗ d
PA
si la distribution de masse est continue, P étant un point courant de la distribution.
III . — PROPRIÉTÉS DU CHAMP DE GRAVITATION
Les propriétés fondamentales du champ de gravitation sont au nombre de deux : la première exprime la relation entre le champ G et le potentiel F, la seconde la relation entre le G et les masses
graves qui le créent. Ces propriétés peuvent s’exprimer globalement ou localement.
III . 1 . — Formes globales
a) Relation entre G et F
La relation entre G et F découle de ce qui précède. Comme F = m ∗ G et Ep = m∗ F, l’équation
F · d r = − d Ep entraîne G · d r = − d F. Donc, le long d’un chemin C :
B
F=−
C
G · d r + Cte
ou
F B − FA = −
A
G · dr
On dit que la différence de potentiel entre deux points A et B est la circulation du champ G, entre ces
deux points, changée de signe.
85
Gravitation. Propriétés du champ de gravitation
Les lignes de champ sont, en chaque point, tangentes au champ G et les surfaces équipotentielles
sont les ensembles de points tels que le potentiel est uniforme :
dx
dy
dz
=
=
Gx
Gy
Gz
et
F(x, y, z) = Cte
Le champ G est normal aux surfaces équipotentielles ; en effet, si d r représente un déplacement élémentaire quelconque sur une telle surface : G · d r = − d F = 0.
Le champ de gravitation G est normal à d r et par conséquent à la surface équipotentielle. En
outre, il est toujours dirigé suivant les potentiels F décroissants.
b) Théorème de Gauss
Le théorème de Gauss (prononcer Gaos) s’appuie sur la notion de flux d’un vecteur (cf. annexe 4).
Le flux du champ G à travers une surface fermée S est l’intégrale :
F=
S
G · n dS
n étant le vecteur unitaire, normal à la surface et orienté vers l’extérieur, au point où le champ est G
(Fig. 6.3a).
n
z
S
P i dS
αi
dΣ
d
dΩi
O
x
y
A
n
αi
dS
Pi
a)
b)
F IG . 6.3.
c Dunod – Toute reproduction non autorisée est un délit
Considérons une surface fermée S entourant un système de masses graves {m ∗i } :
F=
S
G · n d S = −G
S
n·
m ∗i
i
Pi A
d S = −G
P iA 3
m∗i
i
S
n · Pi A
dS
P iA 3
en permutant les signes somme et intégration. Avec les notations de la figure 6.3b, on peut voir la
signification de la quantité sous le signe somme :
n · P iA
d S cos ai
dS
dS =
= d Vi
=
3
2
PiA
P iA
P i A2
C’est une quantité sans dimension, caractéristique du cône de sommet Pi qui s’appuie sur l’élément de
surface d S. On l’appelle l’angle solide et on l’exprime en stéradian (cf. annexe 4).
L’intégration sur l’angle solide Vi est indépendante de la surface S qui entoure le point Pi . On
trouve en considérant une surface sphérique S, de rayon R :
Vi =
d Vi =
dS
1
= 2
2
R
R
dS =
1
4pR 2 = 4p
R2
86
6. Gravitation. Propriétés du champ de gravitation
Les masses graves extérieures, elles, délimitent des angles solides opposés : leur contribution est donc
nulle. Il en résulte que :
S
G · n d S = −4pGM∗in
où M∗in représente la somme des masses graves intérieures à la surface fermée S :
M ∗in =
m∗i,in
ou
Min∗ =
r∗ (r) d
i
si la distribution de masse grave est continue. Ce résultat constitue le théorème de Gauss (du nom du
mathématicien allemand C. Gauss) :
Le flux du champ G à travers une surface fermée est égal à la somme des masses graves intérieures
M ∗in multipliée par la constante (−4pG).
Remarque : Notons que, contrairement à son flux à travers une surface fermée qui dépend uniquement des masses intérieures, le champ de gravitation G, lui, dépend de toutes les masses,
intérieures et extérieures.
III . 2 . — Formes locales
a) Relation entre G et F
La relation G · d r = − d F s’écrit, en coordonnées cartésiennes : G x d x + G y d y + Gz d z = − d F
d’où :
∂F
∂F
∂F
Gx = −
Gy = −
Gz = −
∂x
∂y
∂z
Sous forme condensée (cf. annexe 2), on écrit :
G = − grad F
On déduit des relations précédentes les équations suivantes :
∂Gz
∂Gy
−
=0
∂y
∂z
∂Gx ∂Gz
−
=0
∂z
∂x
∂Gy ∂Gx
−
=0
∂x
∂y
lesquelles peuvent être réunies en une seule équation vectorielle :
rot G = 0
si l’on introduit le rotationnel de G , rot G , de composantes cartésiennes (cf. annexe 4) :
(rot G )x =
∂Gz ∂G y
−
∂y
∂z
(rot G)y =
∂Gx
∂Gz
−
∂z
∂x
Ainsi, l’équation G = − grad F entraîne rot G = 0.
et
(rot G) z =
∂Gy ∂Gx
−
∂x
∂y
87
Gravitation. Propriétés du champ de gravitation
b) Théorème de Gauss
On établit la forme locale du théorème de Gauss à partir d’une relation intégrale connue sous le
nom de formule d’Ostrogradsky (cf. annexe 4). Pour le volume , limité par une surface fermée S ,
on a, par définition de la divergence d’un vecteur :
S
G · n dS =
div G d
où div G est la quantité scalaire d’expression, en coordonnées cartésiennes (x, y, z) :
div G =
∂Gx ∂Gy ∂G z
+
+
∂x
∂y
∂z
Par conséquent, le théorème de Gauss, appliqué au cas d’une distribution volumique de masse grave,
donne :
F=
puisque
S
G · n dS =
div G d
= −4pG
r∗ d
d’où
div G = −4pGr∗
est quelconque.
III . 3 . — Équation de Poisson et équation de Laplace
L’équation de Poisson, du nom du mathématicien français P. Poisson du XVIIIe siècle, est l’équation
à laquelle satisfait le potentiel de gravitation F. C’est une conséquence des deux propriétés du champ :
G = − grad F et
div G = −4pGr∗
Ces deux équations entraînent :
div(− grad F) = −4pGr∗
Donnons la signification de div(grad F), en utilisant les coordonnées cartésiennes :
c Dunod – Toute reproduction non autorisée est un délit
div(grad F) =
∂
∂x
∂F
∂x
+
∂
∂y
∂F
∂y
+
∂ ∂F
∂z ∂z
=
∂ 2 F ∂ 2F ∂ 2 F
+
+ 2
∂x2
∂y2
∂z
Cette quantité est le laplacien de F (du nom du physicien français P. Laplace), noté DF. Finalement,
on obtient l’équation de Poisson :
DF = 4pGr∗
Dans le cas particulier où la région de l’espace considérée ne contient pas de masse grave, cette équation
se réduit à l’équation de Laplace :
DF = 0
IV . — CALCULS DE CHAMPS ET DE POTENTIELS
Lorsque l’on veut déterminer le champ et le potentiel de gravitation produits par une distribution
de masse grave, deux cas se présentent.
i) La distribution de masse possède une symétrie suffisante pour que l’application du théorème de
Gauss donne, sans difficulté, le champ G ; on en déduit alors le potentiel.
88
6. Gravitation. Propriétés du champ de gravitation
ii) Si la symétrie est insuffisante, il est préférable d’exprimer d’abord le potentiel qui est un scalaire
et d’en déduire le champ de gravitation par G = − grad F.
Pour illustrer ces deux cas, nous proposons d’abord de calculer le champ et le potentiel produits par
une sphère concentriquement homogène (r ∗ ne dépend que de la distance r au centre O). Une telle
distribution joue un rôle capital en astrophysique où de multiples objets célestes présentent la symétrie
sphérique. Nous établissons ensuite le développement multipolaire à grande distance d’une distribution
de masse grave sans symétrie.
IV . 1 . — Champ et potentiel produit par une distribution sphérique de masse
Considérons une distribution sphérique de masse grave à l’intérieur d’une sphère de centre O et
de rayon R (Fig. 6.4). Du fait de la symétrie des causes, le potentiel de gravitation ne dépend que de la
norme r. Par conséquent toute sphère S, de centre O, est une surface équipotentielle ; G normal à
S est donc radial.
z
O
n
G
y
x
F IG . 6.4.
a) En un point extérieur
Le théorème de Gauss appliqué à une sphère équipotentielle, de rayon r > R, donne (Fig. 6.4) :
F = 4pr2G r(r) = −4pGM ∗
On en déduit la composante radiale Gr et G :
GM ∗
G r (r) = − 2
r
et
G(r) = −
GM∗
er
r2
Le potentiel F(r) s’obtient à partir de l’équation d F = −G · d r. On a donc :
d F = G r(r) d r = −
GM∗
dr
r2
d’où
F=−
GM∗
+ Cte
r
Si l’on impose F(r) = 0 pour r infini, ce qui est toujours possible puisqu’il n’y a pas de masse à
l’infini. On obtient :
GM ∗
F=−
r
Ainsi, le potentiel et le champ de gravitation créés par une distribution de masse à symétrie sphérique,
en un point extérieur, sont les mêmes que ceux relatifs à une masse ponctuelle, située en O et affectée
de la masse grave totale.
La dépendance radiale r ∗ (r) n’a alors aucune influence et les résultats sont encore valables pour
une sphère non homogène mais concentriquement homogène.
89
Gravitation. Propriétés du champ de gravitation
b) En un point intérieur
Appliquons le théorème de Gauss à une surface sphérique de rayon r < R. Il vient :
4pr 2 Gr (r) = −4pGM ∗in
r
où
M∗in =
4pr 2r ∗ (r ) d r
0
est la masse grave située à l’intérieur de la sphère de rayon r. Donc :
G(r) = −
GM∗in
er
r2
Si la distribution est homogène (r∗ = Cte), on a :
Gr (r) = −
G 4pr 3
GM∗
r
r
=
−
r2
R3
3
d’où
G=−
GM∗
r
R3
On en déduit le potentiel :
−GM ∗
GM ∗ r 2
r d r + Cte =
+ Cte
R3
R3 2
−GM ∗
r · d r + Cte = −
R3
G · d r + Cte = −
F(r) = −
Comme le champ G est fini, le potentiel est continu. On a donc, de part et d’autre de la surface :
F + (r)
R
= F− (r)
d’où
R
−
GM∗
GM ∗
=
+ Cte
2R
R
et
Cte = −
3GM ∗
2R
Finalement :
F(r) =
GM ∗
2R
r2
−3
R2
Sur la figure 6.5, on a représenté les graphes G r(r) et F(r) dans le cas d’une sphère homogène.
Gr(r)
c Dunod – Toute reproduction non autorisée est un délit
O
−
Φ(r)
R
O
r
R
r
G M*
R
3 GM *
−
2 R
GM*
R2
−
a)
b)
F IG . 6.5.
IV . 2 . — Potentiel produit à grande distance par une distribution quelconque de masse
a) Développement multipolaire
Montrons que le potentiel gravitationnel F , à grande distance, se met sous la forme d’une somme
de potentiels. Avec les notations de la figure 6.6a, le potentiel s’écrit :
F(r) = −G
i
m∗i
Ri
où
Ri = Pi A = r − ri
et ri r
90
6. Gravitation. Propriétés du champ de gravitation
Comme R i = (r2 + r 2i − 2r · ri )1/2 = r 1 − 2r · ri /r 2 + r 2i /r2
1/2
, il vient, à grande distance :
r · ri
1
1
3 2r · r i
r2
≈
1 + 2 − i2 +
2r
8
Ri
r
r
r2
d’où :
F(r) = − G
Pi
i
m ∗i
r · ri
3 r · ri
1+ 2 +
r
r
2 r2
2
+ ···
2
−
ri2
+ ···
2r2
z
Ri
ri
A
r
O
A
θ
r
O
y
x
a)
b)
F IG . 6.6.
Le potentiel se met ainsi sous la forme d’une somme de potentiels :
F(r) = F0 (r) + F1 (r) + F2 (r) + · · ·
dans laquelle on reconnaît d’abord :
F0 (r) = −
GM∗
r
avec
M∗ =
m ∗i
qui est la contribution unipolaire ; c’est le potentiel produit par un point situé en O et affecté de la
masse grave totale M∗ .
Ensuite, F 1(r) représente la contribution dipolaire, en 1/r2 , caractérisée par le vecteur d, appelé
moment dipolaire de la distribution :
F1(r) = − G
d · er
d·r
= −G 3
2
r
r
avec
d=
m ∗i ri
i
Quant à F2 (r), on l’appelle la contribution quadrupolaire :
F2(r) = −
G
2r 3
i
m∗i 3(er · r i)2 − ri2 = −
G
2r 5
i
m ∗i 3(r · r i )2 − r2 r2i
Il convient de noter que, contrairement au cas électrique, la somme des masses graves et donc le premier
terme F0 du développement ne sont jamais nuls en présence de matière. Il en résulte que le terme
dipolaire a moins d’importance en gravitation qu’en électromagnétisme (cf. Électromagnétisme).
b) Cas où la distribution présente une symétrie de révolution
Considérons le cas important car fréquent d’un astre dont la distribution de masse grave présente
une symétrie de révolution (Fig. 6.6b). Choisissons l’origine O en son centre de masse grave C défini
m∗
m∗
par
i i CP i = 0 (cf. chapitre 13). Le moment dipolaire est nul puisque
i i ri = 0. Il en résulte
que :
F(r) = F0(r) + F2 (r)
91
Gravitation. Propriétés du champ de gravitation
Explicitons F2 (r) dans la base (ex , ey, ez ), sachant que ez est porté par l’axe de symétrie. Il vient :
F2 (r) = −
G
2r 5
i
m ∗i [3(xxi + yyi + zzi ) 2 − (x2i + y 2i + z 2i )(x2 + y 2 + z 2)]
En raison de la symétrie matérielle, les sommes comportant une puissance impaire de x i ou de y i
s’annulent et les sommes i m∗i x2i et i m ∗i y2i sont égales. Il en résulte :
F2 (r) = −
G
2r 5
=−
G
2r 5
i
m∗i [x 2 (2x2i − y2i − z 2i ) + · · · + 6 xy x i yi + · · · ]
m∗i x2
i
x2i + y 2i
− z 2i
2
+ y2
x2i + y2i
− z 2i + 2z2
2
z2i −
x2i + y2i
2
Les points de suspension représentent des termes analogues que l’on obtient par permutation circulaire.
Introduisons le moment quadrupolaire de la distribution :
Q=
i
m∗i (2z2i − x2i − y 2i )
soit
Q=2
i
m∗i (z2i − x 2i )
en raison de la symétrie de révolution. Il vient :
F 2(r) = −
GQ 2
GQ
(2z − x2 − y2) = − 5 (3z2 − r2)
4r 5
4r
ce que l’on écrit aussi, en fonction de l’angle u que fait OA avec l’axe de révolution (z = r cos u) :
F 2(r, u) = − G
Q(3 cos 2 u − 1)
4r3
c Dunod – Toute reproduction non autorisée est un délit
Remarque : Le moment quadrupolaire Q s’exprime en fonction des moments d’inertie du système
∗ 2
∗ 2
2
2
par rapport aux axes Ox et Oz : I Ox =
i mi (yi + zi ) et I Oz =
i mi (xi + yi )
(cf. chapitre 17). On a : Q = 2(I Ox − IOz ).
Finalement, le potentiel de gravitation d’une distribution de masse à symétrie de révolution a pour
expression :
M∗
Q(3 cos2 u − 1)
F(r, u) = − G
−G
4r3
r
d’où l’on déduit les composantes radiale et orthoradiale du champ de gravitation :
Gr = − G
M∗
3Q(3 cos 2 u − 1)
−
G
4r4
r2
et G u = −G
3Q sin(2u)
4r4
IV . 3 . — Variation du champ de gravitation dû aux autres astres à la surface de la Terre
Le calcul de la variation du champ de gravitation produit par tous les autres astres, à l’exclusion de
la Terre, en un point de sa surface, est utile pour interpréter le phénomène des marées (cf. chapitre 7).
Cette variation avec la position du point considéré A est donnée par la différence : G a (A) − G a(T ), T
étant le centre de la Terre.
92
6. Gravitation. Propriétés du champ de gravitation
Plaçons-nous dans le cas simple où TK reliant T et le centre K d’un astre quelconque, est
contenu dans le plan équatorial terrestre et admettons que les astres présentent la symétrie sphérique
(Fig. 6.7a).
y0
z0
A
GK(A)
T
GK (T )
x0
A
T z0
K
x0
DK
a)
b)
F IG . 6.7.
Le champ de gravitation produit en un point extérieur par l’astre de centre K est le même que celui
produit par toute sa masse concentrée en son centre :
AK
TK
−
GK (A) − G K (T) = GM ∗K
3
AK
TK 3
Comme AK = AT + TK, il vient :
AK 2 = (AT + TK)2 = AT 2 + TK 2 + 2AT · TK = TK 2 1 +
soit, en posant DK = TK, puisque AT D K :
1
1
≈ 3
3
AK
DK
Il en résulte :
G K (A) − G K (T ) ≈ G
1+3
TA · TK
M∗K
AK 1 + 3
3
DK
TK 2
AT · TK
AT 2
+2
2
TK
TK2
TA · TK
TK 2
− TK = G
M∗K
D3K
AT + 3
AK(TA · TK)
TK 2
Le premier terme est porté par AT ; il s’ajoute donc à la gravitation terrestre sans trop la modifier,
puisqu’il est proportionnel à D −3
K . Le second représente un champ pratiquement parallèle à l’axe TK
reliant les centres de masse et proportionnel à la coordonnée x0 = TA · TK/TK du point A selon l’axe
Tx0 perpendiculaire au plan méridien normal à TK :
G
AK(TA · TK)
M ∗K
MK∗
AT
+
3
=
G
D 3K
TK2
D3K
AT + 3
x0
AK
TK
Ainsi, tout se passe comme si A était soumis, de la part du plan méridien normal à la direction TK,
à un champ de répulsion proportionnel à la distance à ce plan (Fig. 6.7b). Comme nous le verrons
ultérieurement (cf. chapitre 7), ce résultat permet d’expliquer l’existence de deux marées par jour.
Sur le tableau 6.1, on a porté les valeurs de la quantité 10 3 × M∗K /D3K pour quelques astres proches
de la Terre ; on voit que les contributions lunaire et solaire sont les plus fortes, dans le rapport 2, 17 à
l’avantage de la Lune.
10 3 × MK∗/D3K
Soleil
Lune
Vénus
Jupiter
0,595
1,296
7 × 10 −5
6 × 10−6
TAB . 6.1.
93
Gravitation. Propriétés du champ de gravitation
V . — ÉNERGIE POTENTIELLE GRAVITATIONNELLE
L’énergie potentielle gravitationnelle d’un corpuscule de masse grave m ∗, plongé dans le potentiel
(g)
F créé par une certaine distribution de masse grave, a pour expression Ep = m∗ F. On se propose
maintenant d’exprimer cette énergie en fonction de toutes les masses en présence, notamment celles
qui créent le potentiel F . Pour cela, commençons par l’exemple simple de deux corpuscules A1 et A2
distants de r .
V . 1 . — Énergie potentielle gravitationnelle de deux corpuscules
D’après ce qui précède, l’énergie potentielle gravitationnelle de l’ensemble des deux corpuscules
A1 et A2 est l’énergie de A 1 dans le potentiel F(A1) créé en A 1 par A2 ; c’est aussi l’énergie de A2
dans le potentiel V (A2 ) créé en A2 par A 1 :
E (pg) = m ∗1 F(A1 ) = m∗1
−Gm ∗2
m∗ m ∗
= −G 1 2
r
r
ou bien Ep(g) = m ∗2 F(A2) = m ∗2
−Gm∗1
m ∗ m∗
= −G 1 2
r
r
ce que l’on écrit souvent sous la forme symétrisée suivante :
Ep(g)
1
= [m∗1 F(A 1) + m∗2 F(A 2)] =
2
i=2
m ∗i F(Ai )
i=1
Notons que le facteur 1/2 n’est pas lié au nombre de corpuscules, mais au nombre de couples que l’on
compterait deux fois si l’on sommait sur les deux corpuscules.
V . 2 . — Énergie gravitationnelle de N corpuscules
Avec un système de trois corpuscules A 1 , A2 et A 3 , on aurait, en considérant les trois couples
différents {A1 , A2} , {A 1, A3 } et {A2 , A3 } (Fig. 6.8) :
Ep(g) = −G
m ∗1 m ∗2
m∗ m∗
m∗ m∗
+ 1 3 + 2 3
r12
r13
r23
c Dunod – Toute reproduction non autorisée est un délit
ce qui se met aussi sous la forme symétrisée :
Ep(g) = −G
1
m∗2
m∗
m ∗1
+ 3 + m ∗2
2
r12
r 13
m∗1
m∗
+ 3 + m ∗3
r12
r23
r12
A1
m 2 m∗1
+
r23 r 13
A2
r13
r23
A3
F IG . 6.8.
En introduisant les potentiels F(A i ) aux points Ai , on trouve bien :
E(pg) =
1 ∗
1
[m 1F(A 1) + m ∗2F(A 2) + m∗3 F(A 3)] =
2
2
i=3
m∗i F(A i )
i=1
94
6. Gravitation. Propriétés du champ de gravitation
L’énergie gravitationnelle d’un ensemble de N corpuscules s’obtient alors aisément en sommant les
énergies gravitationnelles des différents couples (Ai , Aj) :
Ep(g)
= −G
m ∗i m ∗j
couple (i, j)
soit
rij
Ep(g)
G
=−
2
N
N
m∗i
i=1
j=i
m∗j
rij
r ij étant la distance A iA j ; le facteur 1/2 dans la seconde expression est indispensable car on somme
sur toutes les particules et non sur les seuls couples. En introduisant le potentiel Fi en A i , on trouve :
Ep(g) = −
G
2
m∗i
i
j=i
m∗j
1
=
2
r ij
N
m ∗i Fi
avec
i=1
F i = −G
j=i
m ∗j
rij
Retenons donc l’expression suivante de l’énergie potentielle de gravitation d’un système de N corpuscules :
Ep(g)
1
=
2
N
m∗i Fi
i=1
V . 3 . — Énergie gravitationnelle d’une distribution continue de masse grave
a) Expression de l’énergie gravitationnelle en fonction du potentiel
L’expression précédente peut être utilisée si la distribution est continue, encore faut-il remplacer la
sommation discrète par une intégrale et la masse grave m∗i par r∗ d
:
E (pg) =
1
2
r∗F d
Notons que le potentiel F est celui créé par toute la distribution de masse sans exclusion de la masse
au point considéré A, contrairement au cas d’une distribution discrète. Si la distribution est continue, la
contribution de la masse au point où l’on calcule le potentiel est négligeable, ce que l’on peut montrer en
évaluant le potentiel Fε (A) produit par les masses contenues dans un petit volume sphérique de rayon
ε : Fε(A) est proportionnel à ce volume, donc à ε3 , et varie comme ε−1 ; il change donc comme ε 2 ,
ce qui le rend négligeable lorsque ε devient suffisamment faible.
Il en résulte que l’expression de l’énergie gravitationnelle, relative à une distribution continue de
masse, contient à la fois la contribution des énergies d’interaction entre les différents éléments de volume
et celle des énergies propres de chacun de ses éléments.
b) Énergie gravitationnelle d’une boule uniformément répartie en volume
Considérons une boule de rayon R et de masse M ∗ répartie uniformément en volume. Sa masse
volumique est donc r∗ = 3M∗ /(4pR3 ). D’après ce qui précède, le calcul de son énergie gravitationnelle nécessite la détermination préalable du potentiel qu’elle crée en son intérieur. Comme le système
présente la symétrie sphérique, le potentiel ne dépend que de la distance r du centre au point intérieur considéré (cf. section IV). L’énergie gravitationnelle s’écrit donc :
E (pg)
1
=
2
r ∗ Fin d
1
= r∗
2
R
0
Fin 4pr 2 d r
95
Gravitation. Propriétés du champ de gravitation
En remplaçant Fin par son expression établie précédemment, on obtient :
E (pg)
1
= r∗
2
R
0
GM ∗
−
R
3
r2
− 2
2 2R
3GM∗2
4pr d r = −
2R4
2
3r3
r5
−
2 3
10R2
R
0
soit :
3 M ∗2
Ep(g) = − G
5
R
Lorsque l’origine de l’énergie potentielle de gravitation est prise à l’infini, le signe moins traduit le
caractère attractif de la force d’interaction.
Exemple : La Terre peut être assimilée à une distribution sphérique uniforme de masse grave. Son
énergie potentielle vaut donc, puisque M∗ = 6 × 1024 kg et R = 6, 4 × 106 m :
Ep(g) = −
3 × 6, 67 × 10 −11 (6 × 10 24)2
= −2, 25 × 10 32 J
×
5
6, 4 × 10 6
c) Expression de l’énergie gravitationnelle en fonction du champ de gravitation
Afin de relier l’énergie E p au champ G, utilisons l’équation locale div G = (−4pG)r ∗ dans
l’expression de Ep . On a :
1
1
F div G d
r∗ F d = −
Ep(g) =
2
8pG
étant un volume quelconque englobant la distribution, puisqu’en dehors de cette distribution r ∗ = 0.
Afin d’exprimer autrement F div G, explicitons ce terme en coordonnées cartésiennes :
F div G = F
∂Gx
∂Gy ∂Gz
+
+
∂x
∂y
∂z
Or :
∂Gx
∂(FGx )
∂F
∂(FGx )
− Gx
=
=
+ Gx2
∂x
∂x
∂x
∂x
Il en résulte, en combinant avec les deux autres termes de F div G :
c Dunod – Toute reproduction non autorisée est un délit
F
Ep(g) = −
1
8pG
div(FG ) + G 2 d
L’intégrale du premier terme s’écrit aussi, à l’aide du théorème d’Ostrogradsky :
S
FG · n dS
S étant la surface fermée entourant le volume
considéré. Si le volume d’intégration est choisi
infiniment grand et s’il n’y a pas de masse grave à l’infini, la distribution vue d’un point de la surface est
assimilable à celle d’un corpuscule. Il en résulte que F varie comme r −1 , G comme r−2 et donc FG
comme r−1 ×r −2 = r−3 ; la surface variant, elle, comme r2, l’intégrale précédente devient négligeable
lorsque r augmente indéfiniment. Par conséquent :
Ep(g) = −
1
4pG
espace
G2
d
2
96
6. Gravitation. Propriétés du champ de gravitation
l’intégration portant sur tout l’espace. Ainsi, tout se passe comme si l’énergie de gravitation d’une distribution continue de masse grave était répartie dans tout l’espace avec une densité volumique égale à
−G2 /(8pG). Notons que l’énergie gravitationnelle est une grandeur toujours négative si l’origine est
prise lorsque toutes les masses graves sont infiniment éloignées. On peut retrouver, à l’aide de cette dernière expression, l’énergie potentielle de gravitation d’une sphère de masse grave uniformément répartie.
CONCLUSION
(1) Retenons les deux propriétés fondamentales du champ de gravitation G, exprimées sous leur
forme globale :
B
G · dr
et
G · n d S = −4pGMin∗
FB − FA = −
A
S
Localement, ces propriétés s’écrivent respectivement :
G = − grad F (ou
rot G = 0)
et
div G = (−4pG)r ∗
Elles sont analogues à celles du champ électrostatique ; on passe d’un domaine à l’autre en remplaçant
les charges électriques par les masses graves et 1/e0 par (−4pG).
(2) Les calculs de champ et de potentiel sont identiques à ceux du champ électrostatique (cf. Électromagnétisme). Cependant l’importance du dipôle en gravitation est moins grande qu’en électrostatique
car la somme des masses graves n’est jamais nulle.
En ce qui concerne l’énergie gravitationnelle d’une distribution continue de masse grave, rappelons
les résultats essentiels :
G2
1
1
Ep(g) =
et E(pg) = −
d
r∗ F d
2
4pG espace 2
EXERCICES ET PROBLÈMES
P6– 1. Force de gravitation exercée par une sphère
Trouver la force d’attraction exercée par une sphère (rayon R) de masse grave M ∗ régulièrement
répartie en surface, sur un corpuscule A (masse grave m∗ ), situé à la distance r de son centre (Fig. 6.9).
A
R
z
r
F IG . 6.9.
α
A
R
F IG . 6.10.
97
Gravitation. Propriétés du champ de gravitation
P6– 2. Force de gravitation exercée par un disque
Quelle est la force qu’exerce un disque uniforme (masse M ∗ , rayon R) sur un point A, de masse
grave m∗, situé sur son axe à une distance z de son centre (Fig. 6.10) ?
P6– 3. Comparaison de différents champs de gravitation
Comparer les champs de gravitation produits, en un point de leur surface supposée sphérique, par
la Terre, le Soleil, la Lune, Vénus, Mars, Jupiter et Saturne. On utilisera les caractéristiques de ces astres
données dans le tableau des constantes.
P6– 4. Point équigravitationnel entre la Lune et la Terre
Un satellite évolue entre la Terre et la Lune. Déterminer le point où le champ de gravitation total
est nul. On donne la distance Terre-Lune et le rapport des masses : 384 000 km et 81 respectivement.
P6– 5. Champ de gravitation dans une cavité creusée dans une boule
Calculer le champ de gravitation G dans une cavité sphérique que l’on a creusée dans une boule
homogène de masse volumique r∗ . En déduire qu’il est uniforme.
P6– 6. Énergies potentielles de gravitation Terre-Lune et Terre-Soleil
Calculer l’énergie potentielle de gravitation du système Terre-Lune. Même question pour le
système Terre-Soleil.
P6– 7. Variation de l’énergie potentielle de gravitation en fonction de l’altitude
Quelle est l’expression, en fonction de l’altitude, de l’énergie potentielle de gravitation du système
Terre-satellite artificiel, si on prend comme origine l’énergie potentielle à la surface du sol ?
P6– 8. Moment des forces gravitationnelles au centre de la Terre
On assimile la Terre à une distribution volumique de masse présentant une symétrie de révolution
d’axe Tz, T étant le centre de la Terre. Le champ de gravitation G produit par une telle distribution,
de masse totale M ∗T, en fonction de la distance r = TK et de l’angle u = (Tz, TK), est :
c Dunod – Toute reproduction non autorisée est un délit
G(r, u) = G r er + G u eu
avec
Dans ces expressions :
Q = 2(I1 − I3)
Gr = −
avec
3GQ
GM∗K
− 4 (3 cos2 u − 1)
2
4r
r
m ∗i (y2i + z 2i )
I1 =
i
et Gu = −
3GQ sin(2u)
4
r4
m∗i (x2i + y2i )
et I3 =
i
1. Exprimer la force de gravitation qu’exerce la Terre sur l’astre ponctuel K, de masse M ∗K , ainsi
que son moment en T, M T ,T →K . On introduira le vecteur unitaire e u = er × e u.
2. En déduire, à l’aide de l’opposition des actions réciproques, le moment en T, M T , des forces
de gravitation qu’exercent la Lune et le Soleil sur la Terre en son centre. On admettra que la Lune est
dans le plan de l’écliptique, c’est-à-dire dans le plan dans lequel évolue le Soleil dans son mouvement
apparent. Comparer les actions de la Lune et du Soleil.
P6– 9. Énergie gravitationnelle d’une boule homogène
1. Retrouver l’expression de l’énergie potentielle de gravitation d’une boule homogène, de masse
M ∗ et de rayon R, à l’aide du champ de gravitation. Application au cas de la Terre.
2. Quel serait le rayon R 0 d’un astre, de même masse que le Soleil, dont l’énergie gravitationnelle
serait égale à −M∗ c 2 (c ≈ 3 × 10 8 m . s −1) ? Application numérique.
98
6. Gravitation. Propriétés du champ de gravitation
P6– 10. Énergie gravitationnelle d’une sphère homogène
1. Quel est le potentiel de gravitation produit par une sphère (creuse) homogène, de masse M ∗ et
de rayon R ?
2. Trouver son énergie potentielle. Calculer sa valeur pour M ∗ = 1 kg et R = 0, 1 m.
P6– 11. Détermination de certaines caractéristiques physiques de la Terre
La planète Terre est assimilée à une sphère de rayon R. La longueur de l’équateur est
l = 40 000 km. On suppose que la seule force contribuant à la pesanteur est l’attraction newtonienne
exercée par la Terre, qui produit au niveau du sol un champ de gravitation G0 ≈ 9, 80 m . s −2 . On néglige ainsi l’influence de la rotation terrestre.
1. Établir la formule donnant la masse grave volumique moyenne r ∗0 du globe terrestre en fonction
de G0 et de l. Calculer r ∗0 en kg . m−3 , ainsi que la masse grave M ∗ de la Terre.
2. L’expérience montre que la masse volumique de la croûte terrestre est bien inférieure à la valeur précédemment calculée. Aussi suppose-t-on que la Terre est constituée d’un noyau central, sphérique, homogène, de rayon r 2 et de masse grave volumique r ∗2, entouré d’une couche de masse grave
volumique r∗1 .
a) Écrire la relation qui existe entre r 2, R, r∗0 , r∗1 et r∗2 .
b) Calculer la valeur G du champ de gravitation en un point de la couche superficielle distant du
centre de la Terre de r, ainsi que la variation de G pour une petite variation dr, près du sol, en fonction
de dr, G0, R, r ∗0 et r∗1 .
c) Sachant que la période propre d’une horloge à pendule simple, descendue au fond d’un puits de
profondeur h = 195 m, avance de DT0 = 1 s par jour, calculer la masse volumique r∗1 de l’écorce
terrestre.
d) L’étude de la propagation des secousses sismiques transversales montre que le noyau central
commence à une profondeur de H = 1 300 km. Calculer la masse grave volumique de ce noyau.
P6– 12. Oscillations dans le champ de gravitation à l’intérieur d’une boule
On suppose que la Terre a la forme d’une boule (rayon R T ) et que sa masse M ∗T est uniformément
répartie dans son volume.
1. Trouver la force de gravitation à laquelle est soumise une particule A, de masse m ∗ , placée à
une distance r du centre.
2. Montrer qu’une telle particule A, libre de se déplacer selon le diamètre passant par sa position initiale, oscillerait avec une période T0 que l’on exprimera en fonction de R T et du champ de
gravitation G0 à la surface de la Terre. Calculer T 0.
P6– 13. Paradoxe sur le système Soleil-Terre-Lune
On assimile le système Soleil-Terre-Lune à trois points matériels S, T et L dont les masses sont
celles de ces astres.
1. Calculer, dans le référentiel de Copernic, les forces de gravitation qu’exercent sur la Lune respectivement le Soleil et la Terre. Le résultat semble paradoxal. Pourquoi ?
2. Quelle est la valeur du champ de gravitation produit par la Terre en L ? Comparer cette valeur à
la différence du champ de gravitation solaire aux points T et L. Conclure.
7
Référentiels non galiléens.
Dynamique terrestre
Nous avons vu que la loi fondamentale de la dynamique du point matériel faisait apparaître des
référentiels privilégiés, dits galiléens. Or il arrive souvent que l’on doive étudier le mouvement d’un
corpuscule par rapport à un référentiel quelconque. La question immédiate qui se pose alors est la
suivante : comment écrire la loi fondamentale dans un tel référentiel ?
Cette question n’est pas seulement formelle, car c’est en y répondant que le physicien français
L. Foucault put interpréter certains désaccords entre l’observation et les prédictions de la loi fondamentale dans un référentiel terrestre. Le célèbre Pendule de Foucault fut l’éclatante démonstration de la
possibilité de mettre en évidence la rotation de la Terre à l’aide d’une expérience terrestre, sans référence au ciel, et ainsi du caractère approximativement galiléen du référentiel terrestre.
I . — RÉFÉRENTIELS NON GALILÉENS
c Dunod – Toute reproduction non autorisée est un délit
I . 1 . — Définition
Un référentiel non galiléen est un référentiel en mouvement accéléré par rapport à un référentiel
galiléen (cf. chapitre 4). Désignons par R un tel référentiel en mouvement par rapport au référentiel galiléen R (Fig. 7.1). D’après la composition des accélérations, on a, pour un corpuscule A en
mouvement par rapport à R et R :
aA/R = a A/R + ae + aC
avec, si V est le vecteur vitesse de rotation de R par rapport à R (cf. chapitre 3) :
dV
a e = aO /R +
× O A + V × (V × O A) et aC = 2V × v A/R
dt
z
A
z
y
O
y
O
x
x
R
F IG . 7.1.
R
100
7. Référentiels non galiléens. Dynamique terrestre
I . 2 . — Expression de la loi fondamentale dans un référentiel non galiléen
Remplaçant l’accélération a A/R par l’expression précédente dans la relation vectorielle qui traduit
la loi fondamentale de la dynamique, il vient :
maA/R =
F
soit
m aA/R + a e + aC =
F
Ainsi, en isolant le premier terme du premier membre, on obtient :
maA/R =
F − ma e − ma C
Cette équation reliant la quantité de mouvement de A, par rapport à R , à la somme des forces
F
montre que la loi fondamentale de la dynamique peut être appliquée par rapport à un référentiel quelconque, pourvu que l’on ajoute aux forces précédentes, dues à la présence des autres corps, deux forces
supplémentaires la force d’inertie d’entraînement et la force d’inertie de Coriolis respectivement :
Fie = −mae = −m aO /R +
dV
× O A + V × (V × O A)
dt
et
FiC = −maC = −2mV × vA/R
Notons que ces forces d’inertie, qui par définition sont proportionnelles aux masses, ne peuvent pas
être attribuées à la présence de corps situés à proximité du corpuscule : elles sont dues uniquement au
caractère non privilégié du référentiel choisi ; pour cette raison, on les appelle aussi forces de repère.
Remarques : (1) On dit parfois que ces forces sont fictives car elles n’existent que dans les référentiels
non galiléens. En raison de la réalité de leurs effets dans ces référentiels, il nous semble
préférable d’éviter cette dernière dénomination.
(2) Alors que l’expression « force d’inertie de Coriolis » est universellement utilisée, celle
de « force d’inertie d’entraînement » est peu répandue.
(3) Dans les premiers écrits sur la mécanique, on appelait force d’inertie la quantité
−maA/R qui apparaissait dans l’expression SF −maA/R = O de la loi fondamentale, ramenée à une condition d’équilibre sur les forces.
I . 3 . — Cas particuliers
Deux cas particuliers méritent d’être analysés : la translation de R par rapport à R et la rotation
uniforme de R autour d’un axe fixe dans R.
a) Translation
Dans un mouvement de translation, V R/R = 0 (Fig. 7.2) ; par conséquent, l’accélération d’entraînement a e se réduit à l’accélération d’un point quelconque de R , par exemple celle de son origine
O , et l’accélération de Coriolis est nulle :
ae = a O /R
et a C = 2V × vA/R = 0
Il en résulte :
Fie = −ma e = −ma O /R
et
F iC = −maC = 0
101
Référentiels non galiléens. Dynamique terrestre
z
z
O
O
Fie
x
x
A
A
R
y
R
x
F IG . 7.2.
Fie
y
Ω
O
y
y
R
z
H
ae
x
P
R
F IG . 7.3.
b) Rotation uniforme autour d’un axe fixe
Considérons un référentiel R de même origine que R et ayant un mouvement de rotation uniforme d’axe Oz de R (Fig. 7.3). Dans ce cas, l’accélération d’entraînement se réduit à (cf. chapitre 3) :
ae = −V 2HA
H étant la projection de A sur l’axe de rotation. Il en résulte :
F ie = −mae = mV2HA
Cette force d’inertie est dirigée suivant le vecteur HA ; on dit qu’elle est centrifuge car elle « fuit » le
centre de rotation H. Elle a été introduite par Huygens en 1673.
I . 4 . — Corpuscule immobile dans un référentiel non galiléen
Un corpuscule A est immobile dans un référentiel non galiléen R si le vecteur position O A ,
qui détermine sa position par rapport à R , est constant :
O A = Cte
d’où
vA/R = 0
et
aA/R = 0
c Dunod – Toute reproduction non autorisée est un délit
Par conséquent, la force de Coriolis étant nulle, A est immobile si :
F − ma e = 0
II . — DYNAMIQUE TERRESTRE
L’existence des forces d’inertie permet de définir expérimentalement les référentiels galiléens. En
effet, pour un corpuscule soumis à des actions déterminées, tout désaccord entre les prédictions de
la loi fondamentale de la dynamique et les résultats expérimentaux peut être attribué à la nature non
galiléenne du référentiel considéré. C’est ainsi qu’à la suite d’expériences fines, telles que le pendule de
Foucault et la déviation vers l’est d’une bille au cours d’une chute, on a pu interpréter ces expériences
en considérant que le référentiel terrestre ne constituait qu’une réalisation approchée d’un référentiel
galiléen. On admet actuellement que le référentiel de Copernic, dont l’origine est le centre de masse
du système solaire et dont les axes sont définis par trois étoiles éloignées, réalise lui une meilleure
approximation d’un référentiel galiléen.
Nous allons, dans la suite, développer ce point en appliquant la loi fondamentale de la mécanique
dans les référentiels terrestres.
102
7. Référentiels non galiléens. Dynamique terrestre
Distinguons les trois référentiels suivants : le référentiel de Copernic R 0 = C0x 0y0 z0 , le référentiel
géocentrique Rg = Tx 0y0z 0, en translation par rapport à R0 et d’origine le centre T de la Terre, et
le référentiel terrestre local R = Oxyz avec Oy dirigé vers le nord et Ox vers l’est (Fig. 7.4). On
introduit parfois le référentiel de Kepler R K = Sx 0y0z0 en translation par rapport à R0 mais d’origine
le centre S du Soleil.
z0
ΩT
z0
¸
N y
R
ΩT
H
y0
C0
x0
µ
T
¸
O
z
t
R0
x0
Rg
z
x (est)
y0
S
ΩT
A
O
x (est)
F IG . 7.4.
¸
y (nord)
R
F IG . 7.5.
II . 1 . — Définition expérimentale du poids d’un corps
Le poids d’un corps, ou force de pesanteur terrestre qui s’exerce sur lui, est défini expérimentalement comme la force opposée à celle qui le maintient en équilibre dans un référentiel terrestre R
(Fig. 7.5). Si l’on suspend une masselotte A à l’extrémité inférieure d’un ressort, son poids F p est l’opposé de la tension T du ressort à l’équilibre dans R.
II . 2 . — Relation entre pesanteur, gravitation et inertie
Pour déterminer les causes de la pesanteur, écrivons, par rapport à R non galiléen, la loi fondamentale de la dynamique. Les forces qui s’exercent sur le corpuscule A dans le référentiel terrestre
sont :
i) les forces de gravitation, qui s’écrivent m ∗ G(A), en notant m∗ la masse grave de A et G A le
champ de gravitation produit par tous les astres en A ;
ii) les forces d’inertie d’entraînement −ma e et de Coriolis −2mVT × vA/R , VT étant la vitesse
de rotation de la Terre autour de l’axe des pôles, par rapport aux référentiels R 0 ou Rg ;
iii) les forces occasionnelles telles que la tension T du ressort.
Il vient :
maA/R = m ∗ G(A) + T − mae − 2mVT × vA/R
À l’équilibre dans R, aA/R = 0, vA/R = 0 et T = −Fp. Par conséquent :
Fp = m∗ G(A) − mae
Ainsi la pesanteur Fp est la somme vectorielle de la force de gravitation et de la force d’inertie d’entraînement terrestre.
103
Référentiels non galiléens. Dynamique terrestre
II . 3 . — Expression de la loi fondamentale dans un référentiel terrestre
En introduisant le poids F p et en désignant par F oc la somme des forces supplémentaires occasionnelles, la loi fondamentale dans R s’écrit :
maA/R = F p + Foc − 2mV T × vA/R
À condition d’introduire le poids, la loi fondamentale s’écrit rigoureusement, sans adjonction de la
force d’inertie d’entraînement terrestre, mais avec la force d’inertie de Coriolis terrestre.
II . 4 . — Égalité de la masse grave et de la masse inerte
L’égalité de la masse grave et de la masse inerte d’un corps a été établie expérimentalement par
Newton, à l’aide de l’expérience dite du tube de Newton (Fig. 7.6). Dans un tube dans lequel on a fait le
vide, on constate que deux corpuscules, de masses inertes différentes, acquièrent, au cours d’une chute,
la même accélération.
g
Tube
vidé d’air
Corpuscules
Pompe à vide
F IG . 7.6.
c Dunod – Toute reproduction non autorisée est un délit
Appliquons, aux deux corpuscules A 1 et A2 , la loi fondamentale de la dynamique dans le référentiel terrestre R. On obtient :
m1 a1 = F p,1 − 2m1 VT × v1
et m2 a2 = F p,2 − 2m2 VT × v2
On constate que deux corps, abandonnés dans les mêmes conditions, acquièrent la même accélération
et la même vitesse : a 1 = a2 et v1 = v2 . Il en résulte que les poids sont proportionnels aux masses
inertes :
Fp,1
Fp,2
m∗1
m∗
soit
G(A1 ) − ae,1 = 2 G(A 2 ) − ae,2
=
m1
m2
m1
m2
Or les coprs A1 et A 2 sont proches l’un de l’autre de sorte que l’on peut confondre les valeurs des
champs de gravitation G(A1 ) ≈ G (A2 ) et les accélérations a e,1 et ae,2. Il en résulte :
m∗1
m∗
≈ 2
m1
m2
Si on adopte la même unité, le kilogramme, pour la mesure des masses grave et inerte, ce qui revient à
poser égale à 1 la constante de proportionnalité, les masses grave et inerte sont égales. Ce résultat a été
confirmé par des expériences de R. Dicke avec une précision relative de 10−11 .
104
7. Référentiels non galiléens. Dynamique terrestre
Cette égalité des masses grave et inerte est à l’origine du principe d’équivalence affirmant, dans le
cadre de la théorie de la relativité générale d’Einstein, qui date de 1915, que :
m∗ = m
Bien que connue et apparemment banale, l’égalité de la masse grave et de la masse inerte rend la force
de gravitation singulière, car c’est la seule force fondamentale qui, à la manière des forces d’inertie, est
proportionnelle à la masse inerte. Il existe donc une proximité de nature entre les forces de gravitation et
les forces d’inertie. C’est pour cette raison que la force de gravitation n’est pas considérée comme une
force véritable en relativité générale (cf. Relativité et invariance) !
II . 5 . — Champ de pesanteur terrestre
Par définition, on appelle champ de pesanteur terrestre le poids d’un corps par unité de masse :
g=
Fp
= G (A) − a e
m
Séparons dans G(A) la contribution terrestre de celle des autres astres :
G (A) = GT (A) + G a(A)
De même, distinguons dans ae, accélération du point coïncidant A lié à R, l’accélération du centre
T de la Terre et l’accélération due à sa rotation autour de son axe. Il vient, en introduisant le référentiel
géocentrique Rg, d’après la composition des accélérations de A entre R0 et R g :
ae = aA /R 0 = aT/R 0 + V2T A H = a T/R0 + V2T AH
H étant la projection de A suivant l’axe de rotation. Il en résulte que :
g = GT (A) + V2T HA + G a(A) − aT/R 0
L’application de la loi fondamentale à la Terre considérée comme un point matériel T de masse M T
donne :
MT aT/R 0 = MT G a (T )
soit
a T/R0 = Ga(T )
On en déduit l’expression suivante du champ de pesanteur :
g = G T (A) + V2T HA + Ga(A) − G a (T )
Par définition, la direction de g est la verticale et sa norme g l’intensité du champ de pesanteur, appelée
aussi accélération due à la pesanteur. Tout plan normal à g est un plan horizontal.
Remarque : Nous avons volontairement utilisé l’expression accélération due à la pesanteur plutôt que
celle d’accélération de la pesanteur qui est incorrecte mais très souvent employée.
105
Référentiels non galiléens. Dynamique terrestre
Dans l’expression de g, le premier terme G T (A) dû à la Terre est prépondérant. Le deuxième,
proportionnel au carré de la rotation de la Terre autour de l’axe des pôles, est la contribution centrifuge.
Quant à la différence des deux derniers termes, elle représente la variation du champ de gravitation en
des points de la surface de la Terre ; c’est cette différence qui permet d’expliquer les marées (cf. III).
Généralement, on la néglige ; le champ de pesanteur apparaît alors comme la somme du champ de
gravitation terrestre et d’un champ centrifuge :
g = G T(A) + V2T HA
À l’équateur où il est maximal, puisque HA est égal au rayon terrestre R T , le champ centrifuge vaut :
GT
GT
= 2
289
17
Ce résultat explique pourquoi on dit parfois qu’il y aurait impesanteur à l’équateur, c’est-à-dire g = 0,
si le solide-Terre tournait 17 fois plus vite !
Ainsi, même si la Terre était sphérique et concentriquement homogène, la direction de g ne passerait pas par le centre de la Terre, excepté évidemment aux pôles et à l’équateur (Fig. 7.7). On montre
que cette direction fait avec le rayon terrestre local un angle a dont la valeur maximale de 6 minutes
d’arc est atteinte pour une latitude voisine de 45 ◦ (cf. Exercices).
V 2T RT = 3, 4 × 10−2 ≈
y
VT
z
O
N
G
µ
T ®
−ae
g
S
F IG . 7.7.
Pour connaître les variations de g avec l’altitude et la colatitude u, on explicite ce champ suivant
la direction radiale er = TO/TO et la direction orthoradiale eu (Fig. 7.7) :
c Dunod – Toute reproduction non autorisée est un délit
g r ≈ g z = −G
MT
+ V2T r sin 2u
r2
et gu ≈ −g y = V2T r cos u sin u
ce qui s’écrit en fonction de la latitude du lieu l = p/2 − u :
gr ≈ g z = −G
MT
+ V2T r cos 2 l
r2
et gu ≈ −gy = V 2Tr sin l cos l
Lorsque les déplacements ont lieu au voisinage d’un point de la surface de la Terre, le champ de pesanteur peut être considéré comme uniforme. On écrit alors g = −g ez avec g = g.
Remarques : (1) Cette présentation, qui subordonne le champ de pesanteur au champ de gravitation et
aux forces d’inertie d’entraînement, montre que le concept de masse pesante, que l’on introduisait autrefois, est superflu. En revanche, certains auteurs distinguent la masse grave
active qui produit le champ de gravitation, de la masse grave passive qui le subit ; l’opposition des actions réciproques permet alors d’établir l’égalité de ces deux masses.
(2) En réalité, la Terre n’est pas sphérique mais légèrement renflée à l’Équateur, comme
l’avait prévu Newton, soutenu en France par P. Maupertuis, G. Marquise du Châtelet et
Voltaire, contre J. Cassini.
106
7. Référentiels non galiléens. Dynamique terrestre
III . — MARÉES OCÉANIQUES
Sur la Terre, les marées océaniques sont attribuées à la non-uniformité du champ de gravitation
produit par tous les autres astres. Elles sont donc dues à la variation, avec la position du point A, à la
surface de la Terre, de la différence des champs de gravitation : G a (A) − G a(T ).
Plaçons-nous dans le cas simple où le vecteur TK, reliant le centre de masse T de la Terre et
celui K d’un astre quelconque, est contenu dans le plan équatorial terrestre et admettons que les astres
présentent la symétrie sphérique (Fig. 7.8) : le champ de gravitation, produit en un point extérieur, est
le même que celui produit par toute la masse concentrée au centre des astres (cf. chapitre 6).
Comme la distance qui sépare les points A et T est faible devant D K = KT, la contribution
de cet astre à la différence des champs de gravitation est proportionnelle à la différentielle du champ
GK = GM K /D2K , c’est-à-dire à sa masse M K et à 1/D 3K . C’est bien ce que révèle une analyse plus fine
(cf. chapitre 6) :
G K (A) − G K(T ) ≈ G
MK
x0
AT + 3 AK
3
TK
DK
x0 étant la composante du vecteur TA selon la direction TK. Sur la figure 7.8, on a représenté le
vecteur GK (A) − G K (T ) : tout se passe comme si A était soumis à un champ de répulsion de la part du
plan méridien perpendiculaire à la direction de KT et proportionnel à la distance du point à ce plan.
y0
Terre
A
ΩT
K
x0
T
F IG . 7.8.
Ce terme prévoit donc l’existence de deux marées quotidiennes que l’astre K produit sur la Terre.
En effet, au cours d’une révolution autour de l’axe Tz 0, le point A de la surface de la Terre, représentant
par exemple un élément de liquide océanique, est soumis deux fois à une force maximale de répulsion.
C’est ce que l’on observe sensiblement sur la côte atlantique de la France. Les effets de la Lune
et du Soleil, qui sont les plus importants, dans le rapport 2,18 à l’avantage de la Lune (cf. chapitre 6),
peuvent s’ajouter ou au contraire s’opposer. Au cours d’une lunaison, ils s’ajoutent aux syzygies, lorsque
le Soleil, la Terre et la Lune sont alignés, c’est-à-dire à la pleine et à la nouvelle Lune (marées de viveeau), et s’opposent aux quadratures lors des premier et dernier quartiers (marées de morte-eau). Sur la
figure (Fig. 7.9), la configuration des astres correspond à la nouvelle Lune.
D’une journée à l’autre, en raison du mouvement orbital de la Lune autour de la Terre, on observe
un décalage des heures de marée. Pour que la Lune se retrouve dans la même position que la veille, il
faut attendre que la Terre ait effectué une rotation complète augmentée de l’angle de déplacement de la
Lune sur son orbite pendant une durée T j = 1 j :
w = 2p +
2p
Tj
TL
avec
T L = 27, 3 j
107
Référentiels non galiléens. Dynamique terrestre
23 ◦ 26
Axe
sud-nord
Soleil
Lune
Terre
5◦
Plan de l'écliptique
F IG . 7.9.
Pour effectuer cette rotation, la Terre mettra une durée égale à :
T=
2p
2p Tj
w
=
+
= Tj
VT
V T V T TL
1+
Tj
TL
= 24 h + 53 min
c Dunod – Toute reproduction non autorisée est un délit
Le décalage horaire des marées est donc de l’ordre 50 min par jour.
Au cours d’une année, l’action du Soleil varie puisque, par rapport à la Terre, cet astre évolue dans
le plan de l’écliptique qui fait avec le plan équatorial un angle de 23 ◦ 26 . Deux fois dans l’année,
au moment des équinoxes de printemps et d’automne, lorsque le Soleil traverse le plan équatorial, sa
contribution aux marées est maximale (marées d’équinoxes).
En France, on introduit, depuis le XIX e siècle, des coefficients de marées qui varient linéairement
avec le marnage, c’est-à-dire la dénivellation verticale entre la pleine mer et la basse mer. Arbitrairement,
on a affecté la valeur 20 à une marée de morte-eau exceptionnelle et la valeur 120 à une marée de
vive-eau exceptionnelle. Par exemple, lors de la marée exceptionnelle du 10 mars 1997, le coefficient
valait 119.
L’amplitude des marées peut varier beaucoup d’un point à un autre du globe. On explique cette
grande variation en faisant intervenir la résonance entre le terme significatif de la gravitation qui présente une période de l’ordre de 12 heures et les oscillations propres des masses fluides dans les fonds
marins. Dans certains sites, l’influence des dimensions, de la forme et de la profondeur des fonds marins est telle que les marées sont négligeables (c’est le cas en Méditerranée) ou que leur période diffère
sensiblement de 12 heures.
Remarque : L’effet de marée qu’exerce la Lune entre la tête et les pieds d’une personne mesurant
h = 1, 80 m étendue selon la direction de l’astre est négligeable ; en effet, on a, par kg :
GML
3h = 4, 7 × 10−13 N.kg −1
D3L
IV . — LA FORCE DE CORIOLIS TERRESTRE
La mise en évidence de la force de Coriolis terrestre repose sur l’expression vectorielle de la loi
fondamentale de la mécanique appliquée à un point matériel A dans un référentiel terrestre. Notant F oc
la somme des forces supplémentaires occasionnelles, il vient :
maA/R = mg + Foc − 2mVT × vA/R
La force de Coriolis terrestre est le plus souvent négligeable devant le poids. En effet :
g ≈ 9, 8 m . s −2 alors que
2V T × v < 1, 5 × 10−4 × v
108
7. Référentiels non galiléens. Dynamique terrestre
Le rapport de ces deux forces est donc inférieur à 1 % si la vitesse est inférieure à 700 m . s−1 . Cependant, c’est ce terme généralement négligeable qui permet d’expliquer certains phénomènes observables
et jouant parfois un rôle majeur (déviation des vents et des courants marins).
IV . 1 . — Déviation de la trajectoire d’une particule
Considérons une particule A astreinte, par une force de réaction R, à évoluer dans un plan horizontal et ayant, au point O, une vitesse v0 horizontale (Fig. 7.10a).
z0
z
¸
O
x (est)
v0
Ωh
y
ΩT
ΩT
Ωv
z
Hémisphère
nord
µ
O
Ωv
y (nord)
y
T
µ
Ωv
O
a)
z
b)
Hémisphère
sud
F IG . 7.10.
L’effet de la force de Coriolis, peut être étudié à partir de l’équation vectorielle donnée par la loi
fondamentale de la dynamique dans le référentiel terrestre R = Oxyz :
m
dv
= mg + R − 2mVT × v
dt
Comme la trajectoire est pratiquement contenue dans le plan horizontal Oxy, l’équation précédente se
réduit dans ce plan à :
m
dv
= −2mV v × v
dt
soit
dv
= 2v × Vv
dt
où V v est la contribution verticale de VT . On voit que le vecteur vitesse varie vectoriellement selon
la direction et le sens de v × V v. Dans l’hémisphère sud, la déviation change de sens, comme on peut
le vérifier sur une particule se déplaçant vers le nord (axe Oy de la figure 7.10b).
L’équation réduite du mouvement est caractéristique d’un mouvement circulaire et uniforme : en
effet, on peut la rapprocher de l’équation du mouvement d’une particule chargée dans un champ magnétique B (cf. chapitre 8) :
m
dv
= qv × B
dt
soit
dv
= v × vc
dt
avec
vc =
qB
m
L’équation précédente donne donc, dans le plan horizontal :
v 02
= 2v0 Vv = 2v 0V T| sin l|
R
d’où
R=
v0
2VT | sin l|
Remarque : La contribution horizontale Vh de V T intervient dans l’équation qui exprime que la
somme des forces verticales doit être nulle : mg + R − 2mV h × v = 0.
Sur la figure 7.10a, on a représenté le cercle décrit dans l’hémisphère nord : la particule est déviée
vers la droite d’un observateur placé selon la verticale ascendante locale ; elle repasse par le même
109
Référentiels non galiléens. Dynamique terrestre
point au bout d’une durée égale à 12 h/ | sin l| ; sa valeur est maximale aux pôles. Cette déviation de
la trajectoire des particules par la force de Coriolis, établie théoriquement par Poisson en 1837, joue un
rôle important en géophysique, car elle permet d’expliquer l’origine des alizés dans l’hémisphère nord ;
ces vents sont dus au déplacement des masses d’air venant du nord et se dirigeant vers l’équateur où elles
remplacent les masses d’air chaudes en mouvement ascensionnel. En raison de la déviation vers la droite
par la force de Coriolis, ces vents semblent provenir du nord-est (Fig. 7.11). On explique aussi, par la
force de Coriolis, la déviation vers la droite du Gulf Stream ; comme son nom l’indique, c’est un courant
marin, produit dans le golfe des Caraïbes par les vents du sud-ouest, qui se dirige vers le nord. Pendant
longtemps, on a attribué à ce courant marin chaud la différence de température constatée entre la côte
est des USA et la côte ouest européenne plus tempérée ; cette interprétation est actuellement constestée.
En météorologie, à une échelle synoptique, la force de Coriolis permet de la même façon d’interpréter la structure en spirale des masses nuageuses autour de zones de basse pression. Dans l’hémisphère nord, la spirale est décrite dans le sens inverse des aiguilles d’une montre ; dans l’hémisphère
sud, c’est le contraire.
La figure 7.11b représente une photographie, prise par satellite en 2005, du cyclone Katrina sur la
côte atlantique sud des USA. Le sens de description de la spirale nuageuse est donné par la variation
du vecteur vitesse orientée selon v × Vv et peut être obtenu en s’aidant de la figure 7.11c. En effet,
la vitesse v est globalement orientée des hautes pressions périphériques vers les basses pressions de la
zone centrale. En raison du terme 2v × Vv , les trajectoires des particules contournent la zone centrale
de faible pression du fait de la déviation vers la droite par rapport à la direction de v. Il en résulte une
orientation de la spirale dans le sens inverse des aiguilles d’une montre. La justification complète de ce
mouvement sera donnée en mécanique des fluides (cf. chapitre 30).
Pôle nord
ΩT
920 hPa
D
Haute pression
1 100 hPa
Équateur
c Dunod – Toute reproduction non autorisée est un délit
Pôle sud
Hémisphère nord
a)
b)
F IG . 7.11.
c)
Remarques : (1) Autour de zones de surpression (cas d’un anticyclone), le sens de la spirale est inversé.
(2) On donne souvent comme exemple de cette déviation celle prise par l’eau lorsqu’on
vidange un lavabo. En réalité, l’analyse montre que la précision sur l’état mécanique du
fluide devrait être très grande pour que l’expérience soit significative (cf. chapitre 30).
IV . 2 . — Pendule de Foucault
a) Expérience historique
Dans sa publication originale du 3 février 1851, à l’Académie des Sciences, Foucault fit remarquer
qu’il était possible de mettre en évidence et de mesurer la vitesse de rotation VT de la Terre autour de
l’axe des pôles, sans l’aide des étoiles, en étudiant seulement le mouvement d’un pendule simple par
rapport au référentiel terrestre R.
110
7. Référentiels non galiléens. Dynamique terrestre
Le comportement d’un tel pendule s’interprète aisément au pôle nord, sans équation ( !) comme
le fit remarquer Foucault lui-même. En effet, par rapport au référentiel géocentrique Rg , le pendule,
écarté de sa position d’équilibre et abandonné à son poids et à la tension du fil, effectue un mouvement
oscillatoire dans un plan fixe, déterminé par les conditions initiales. Aussi, dans R, qui tourne par
rapport à Rg , dans le sens ouest-est, avec la vitesse angulaire VT , ce plan semble effectuer une rotation
autour de l’axe polaire, dans le sens opposé, avec une période de révolution T de 24 heures.
L’expérience a été faite par Foucault à Paris, dans sa cave, puis refaite sous la coupole du Panthéon
avec les caractéristiques suivantes : masse m = 28 kg et longueur l = 67 m (Fig. 7.12a). Dans ce
cas, seule la composante selon la verticale ascendante Oz du vecteur rotation VT joue un rôle effectif,
précisément Vv = VT cos u ez = VT sin l ez, u étant la colatitude et l = p/2−u la latitude. Comme
l = 48◦ 51 , la période de révolution du plan du pendule de Foucault vaut :
2p
2p
2p
T=
=
=
= 31 h 52 min
Vv
V T cos u
VT sin l
Remarques : (1) Notons qu’à l’équateur (l = 0◦ ) le plan d’oscillation du pendule dans R est immobile (T = ∞) ; il tourne donc par rapport à R g .
(2) On peut simuler le comportement d’un tel pendule à l’aide d’une expérience simple
dans laquelle un pendule simple oscille, alors que son support repose sur le plan d’un
tabouret en rotation autour d’un axe vertical (Fig. 7.12b) : le référentiel terrestre simule le
référentiel géocentrique et le référentiel du tabouret celui lié à la Terre. On constate que
le plan d’oscillation du pendule n’est pas influencé par la rotation du tabouret ; dans le
référentiel lié au tabouret, ce plan semble tourner en sens inverse.
z0
z
O1
O1
z
Vv
A
VT
O
¸
y0
x
y (nord)
O
y
A
x0
V
Tabouret
x (est)
a)
b)
F IG . 7.12.
b) Développement quantitatif
Il n’est pas inutile de préciser que l’analyse quantitative, développée à partir des projections de
l’équation vectorielle du mouvement, celle qui a la faveur dans l’enseignement français de la mécanique,
ne fut pas effectuée par Foucault, probablement peu intéressé par ce développement technique, mais par
le mathématicien astronome italien Giovanni Plana, plusieurs mois après l’expérience.
L’application de la loi fondamentale de la dynamique, par rapport au référentiel terrestre R , aux
petits mouvements du pendule autour de l’origine O de R , donne, en remplaçant la force de tension
FT qu’exerce le fil par −(F T/l)SA :
FT
SA − 2mV T × vA/R
l
Le dernier terme du second membre est la force d’inertie de Coriolis terrestre qui apparaît dans R , la
force d’inertie d’entraînement étant contenue dans le poids. Il vient, en supprimant toutes les contribumaA/R = mg −
111
Référentiels non galiléens. Dynamique terrestre
tions verticales des trois forces, mg, FT = −(F T /l)SO et −2mV h × vA/R , V h étant la composante
horizontale de VT :
F
maA/R = − T OA − 2mV v × vA/R
l
Comme FT ≈ mg, on obtient, en introduisant la pulsation d’oscillation du pendule v0 = (g/l)1/2 ,
laquelle, rappelons-le, ne dépend pas de la masse en raison de l’égalité de la masse grave et de la masse
inerte :
aA/R + v 20 OA = −2V v × v A/R
Le premier membre est caractéristique d’un oscillateur horizontal bidimensionnel ; le second, dû à la
force de Coriolis, provoque une lente rotation du plan d’oscillation, à la vitesse angulaire V v , dans
le sens est-ouest. La projection de l’équation vectorielle dans la base cartésienne de R donne des
équations différentielles dont la résolution montre que, dans un référentiel R en rotation uniforme par
rapport à R , avec la vitesse angulaire V v = VT cos u , la trajectoire est une ellipse très aplatie (cf.
Exercice). La simple comparaison des termes proportionnels à OA et à 2Vv × v A/R , où la vitesse
introduit un terme de la forme v0 OA déphasé de p/2 , en raison du caractère oscillant du pendule,
permet d’en déduire le rapport des axes de l’ellipse (Fig. 7.13) :
VT cos u v0
VT cos u
b
T0 cos u
≈ 10−4
=
=
=
2
a
TJ
v0
v0
1/2
puisque TJ ≈ 86 400 s et T0 = 2p (l/g)
≈ 16, 4 s .
y (Nord)
y
x (Est)
¡(Ω T cos µ)t
Ouest
Sud
x
c Dunod – Toute reproduction non autorisée est un délit
F IG . 7.13.
Remarque : De nos jours, on mesure la vitesse de rotation de la Terre V T par des méthodes interférométriques (cf. Optique). On étudie l’évolution de la différence de phase f entre les ondes
centimétriques monochromatiques (de longueur d’onde l0 ) provenant d’une étoile et reçues par deux antennes radioélectriques distantes au sol de la base b. Si s est la position
de l’étoile comptée à partir du plan médian des antennes et D la distance de l’étoile, on a
(cf. Optique) :
f=
2p bs
l0 D
avec
s
=
D
VT d t
d’où
df
2p
b VT
=
dt
l0
Connaissant l 0, b et d f/ d t, on en déduit VT .
c) Référentiel local
On peut aussi éviter d’introduire la force supplémentaire de Coriolis en cherchant un référentiel
local adapté, précisément celui R en rotation par rapport à R , tel que le vecteur vitesse de rotation
de ce dernier par rapport à R g soit compensé par le vecteur vitesse de rotation de R par rapport à R
(Fig. 7.13). Il vient, d’après la composition des vecteurs vitesse de rotation :
VR/R g = V R /R + VR/Rg = 0
d’où
VR /R = −VR/Rg = −V T
112
7. Référentiels non galiléens. Dynamique terrestre
Il en résulte que les vecteurs de base de R coïncident avec ceux de R g : ces deux référentiels sont en
translation l’un par rapport à l’autre, mais R n’est pas galiléen, car son origine O est en mouvement
accéléré par rapport à R g .
Localement, la compensation de la rotation de R par rapport à R g ne concerne que la composante
verticale de cette rotation :
VR /R · e z = −V T cos u e z = −V T sin l ez
Bien que non galiléen, R présente localement des propriétés de simplicité, analogues à celles de R g ,
puisque la loi fondamentale de la dynamique dans ce référentiel s’écrit simplement :
m a A/R = m g + F T
La solution générale de l’évolution de l’angle a , que fait la direction du pendule SA avec la verticale descendante, est alors : a(t) = C1 cos(v0t) + C 2 sin(v 0t) , C 1 et C2 étant deux constantes
déterminées par les conditions initiales. Si x et y sont les coordonnées de A dans le plan horizontal, on a, en utilisant la notation complexe, la relation suivante, avec les coordonnées correspondantes x
et y dans R :
z = x + iy = exp(−iVT cos u t) z avec z = (x + iy )
d) Déphasage géométrique
L’analyse précédente montre que, dans le référentiel terrestre R , apparaît un terme de phase,
d’expression exp(−iVT cos u t) , qui ne s’annule pas après un tour complet de la Terre, mais vaut :
exp −iVT cos u ×
2p
VT
= exp (−i2p cos u)
Cette différence de phase est celle que l’on observerait entre deux pendules de Foucault synchronisés,
excités au même endroit et dans les mêmes conditions, mais à 24 h d’intervalle de temps.
Retenons qu’après 24 h , le pendule présente une différence de phase de nature géométrique égale
à −2p cos u . En ajoutant 2p , ce qui est légitime puisque les angles sont définis à 2p près, on trouve
2p(1 − cos u) , c’est-à-dire l’angle solide défini par le mouvement de la verticale Oz au cours d’une
rotation complète de la Terre (Fig. 7.14). Cet angle solide est le flux du champ r/r 3 , avec r = CO ,
lequel est proportionnel au champ de gravitation, à travers la calotte terrestre supposée sphérique que
découpe ce vecteur au cours du mouvement de rotation de la Terre.
ΩT
N
µ
O
r
C
Terre
S
F IG . 7.14.
113
Référentiels non galiléens. Dynamique terrestre
IV . 3 . — Déviation vers l’est lors d’une chute libre
Au cours d’une chute libre, la force occasionnelle F oc, qui apparaît dans l’expression de la loi
fondamentale, est nulle. Il vient donc :
maA/R = mg − 2mVT × vA/R
À l’aide de la figure 7.15a représentant le vecteur VT dans R, il est facile de voir, qualitativement, que
la force de Coriolis est toujours dirigée vers l’est puisque VT est porté par l’axe Tz 0 et v est dirigé
initialement suivant la verticale descendante −Oz.
z0
Ω
N
T
z
y
z
v
Déviation vers l'est (Ox)
θ
v
a)
ΩT
h
T
λ
y
Déviation vers l'est (Ox)
O
x (est)
z
y (nord)
R
b)
F IG . 7.15.
Comme v A/R ≈ −gt ez, il vient, en substituant et en simplifiant :
aA/R ≈ g + 2g Vh t ex
Pour obtenir le déplacement vers l’est, projetons cette relation vectorielle selon ex. On trouve
(Fig. 7.15b).
gt3 VT cos l
ax ≈ 2gt V T cos l d’où vx ≈ gt2V T cos l et x ≈
3
On trouve le déplacement x h en fin de chute, en remplaçant la durée de chute th par la valeur qu’en
donne l’équation approchée h ≈ gt2h/2 :
c Dunod – Toute reproduction non autorisée est un délit
xh ≈
8h3
9g
1/2
V T cos l
La première expérience sur la déviation vers l’est a été tentée sans succès par l’astronome français J.
Cassini, dans un puits de l’Observatoire de Paris. Elle a été refaite de nombreuses fois, en 1831, par
l’ingénieur allemand F. Reich, dans un puits de mine de Freiberg (l = 51◦ ), de profondeur 158 m ;
alors que la théorie prévoyait une valeur de 27, 5 mm, les valeurs expérimentales étaient comprises
entre 27, 9 mm et 28, 7 mm.
En 1903, Flammarion l’a refaite avec des billes d’acier abandonnées du haut de la coupole du Panthéon (h = 68 m, l = 48 ◦ 51 ) ; la durée approximative de chute était de 3, 72 s. Expérimentalement,
il a trouvé 7, 6 mm, alors que la valeur théorique attendue était x ≈ 8 mm.
V . — RÉFÉRENTIELS ACCÉLÉRÉS PAR RAPPORT À LA TERRE
Nous avons vu que, pour tout corps situé au voisinage de la surface de la Terre, et ayant une vitesse
inférieure à 700 m . s−1 , on pouvait considérer le référentiel terrestre comme un très bon référentiel
galiléen, pourvu que l’on remplace le champ de gravitation G par le champ de pesanteur g.
114
7. Référentiels non galiléens. Dynamique terrestre
Désormais, nous nous placerons dans cette hypothèse et nous étudierons le mouvement d’un corpuscule par rapport au référentiel R = Ox y z , en mouvement accéléré par rapport au référentiel
terrestre R = Oxyz. S’introduisent alors de nouvelles forces d’inertie d’entraînement et de Coriolis, associées au mouvement accéléré de R par rapport à R.
V . 1 . — Loi fondamentale dans le référentiel non galiléen R
Par rapport à R non galiléen, la loi fondamentale appliquée à un point matériel A, de masse m,
s’écrit :
m aA/R = m g + F oc − m ae − m aC
Foc désignant diverses forces occasionnelles, les forces d’inertie étant évidemment relatives au seul
mouvement de R par rapport à R. Il convient donc de ne pas les confondre avec la force d’inertie
d’entraînement terrestre, qui est contenue dans m g, et avec la force d’inertie de Coriolis terrestre, qui
est négligeable.
V . 2 . — Champ de pesanteur apparent
On définit le poids apparent F p,a de A dans R par la force opposée à la force occasionnelle de
tension FT qui maintient A immobile dans R . On a donc, en faisant a A/R = 0 et v A/R = 0 dans
l’équation précédente :
0 = m g + FT − m a e d’où
Fp,a = −F T = m g − m a e
En divisant par la masse, on obtient le champ de pesanteur apparent ga :
ga = g − ae
V . 3 . — Exemples
a) Accéléromètre dans un véhicule en mouvement horizontal
La masselotte A est suspendue par un fil au plafond d’un véhicule R en mouvement de translation accélérée selon l’axe horizontal Ox (Fig. 7.16a). Si ax est l’accélération de O selon l’axe du
mouvement Ox et si (FT ,x , FT ,y ) désignent les composantes de F T dans la base de R , l’équation d’équilibre FT + m ga = 0 s’explicite selon :
FT ,x − max = 0 et
F T ,y − mg = 0 d’où
F T ,x
ax
= − tan a e =
F T ,y
g
et a x = −g tan a e
a e étant l’angle d’inclinaison du fil immobile par rapport à la verticale ; dans le cas considéré sur
la figure 7.16b, a e < 0. Il est donc possible de mesurer ax par la simple détermination de l’angle
d’inclinaison ae, d’où le nom d’accéléromètre donné au pendule.
Une autre méthode de détermination de l’accélération du véhicule consiste à mesurer dans R la
période d’oscillation T du pendule, de longueur l. Le pendule oscille dans le champ de pesanteur
apparent ga , d’intensité ga = g/ cos a e (Fig. 7.16b). Par conséquent, la période a pour expression :
T = 2p
l cos ae
g
1/2
115
Référentiels non galiléens. Dynamique terrestre
y
O
y
R
ae
O
g
FT
x
−ma e
®e
A
R
O
®e
A
®e mg
x
a)
b)
F IG . 7.16.
b) Champ de pesanteur apparent dans une cabine d’ascenseur
Considérons une cabine d’ascenseur R en mouvement accéléré selon la verticale par rapport au
référentiel terrestre R (Fig. 7.17a). D’après l’expression du champ de pesanteur apparent, il vient, en
projetant sur un axe vertical ascendant :
ga · ez = g · e z − ae · ez
d’où
g a,z = −g − ae · e z
i) Si a e · ez > 0 (mouvement accéléré ascendant), alors |ga,z | > g : les corps sont plus pesants.
ii) Si a e · ez < 0 (mouvement accéléré descendant), alors |ga,z | < g : les corps sont moins pesants.
À titre d’exemple, un observateur sur une balance dans la cabine d’ascenseur constate que son
poids apparent est supérieur à son poids, dans R, lorsque la cabine a un mouvement accéléré vers le
haut. C’est le contraire pour un mouvement accéléré vers le bas.
Dans le cas particulier où la cabine est en chute libre, a e · e z = −g. Le champ de pesanteur apparent est alors nul dans la cabine. On dit qu’il y a impesanteur. Cette propriété est utilisée pour entraîner
les cosmonautes en impesanteur. Souvent, le laboratoire d’essai est un avion dont on coupe périodiquement les moteurs, une fois en vol (Fig. 7.17b). Le centre de masse de l’avion décrit des portions de paraboles caractéristiques de la chute libre avec une vitesse initiale horizontale ; les cosmonautes sont en
impesanteur pendant quelques minutes.
c Dunod – Toute reproduction non autorisée est un délit
z (km)
z
aO
z
O
x
A
10
R
g
y
Ascenseur
y
O
8
az = 1,8 g az = 0
R
0
x
20
b)
a)
F IG . 7.17.
az = -1,8 g
45
65
t (s)
116
7. Référentiels non galiléens. Dynamique terrestre
Remarque : Le mot impesanteur, construit à l’aide du préfixe privatif latin im, a été préféré à apesanteur, formé avec le privatif grec a, car il permet d’éviter la confusion phonétique entre
l’apesanteur et la pesanteur.
c) Champ de pesanteur apparent dans un référentiel tournant
Si le référentiel R tourne uniformément autour de l’axe Oz de R, avec la vitesse angulaire V,
l’accélération d’entraînement a pour expression (Fig. 7.3) : −V2 HA. Par conséquent :
g a = g + V2 HA
Ce champ de pesanteur apparent permet d’interpréter la forme incurvée que prend la surface d’un liquide dans un flacon astreint à tourner autour d’un axe vertical (Fig. 7.18). On peut montrer en effet que
la surface libre du liquide en rotation uniforme prend la forme d’un paraboloïde de révolution (cf. chapitre 28). Ce résultat a été utilisé pour construire de grands miroirs paraboliques destinés à l’observation
astronomique (cf. Optique).
z
H
A
Ω 2 HA
ga
g
V
F IG . 7.18.
VI . — RÉFÉRENTIELS INERTIELS
VI . 1 . — Définition
Un référentiel est dit inertiel si on peut y réaliser le principe de l’inertie : tout point matériel soumis
à aucune force occasionnelle conserve sa vitesse initiale.
Dans ces référentiels R i , en translation rectiligne uniforme les uns par rapport aux autres, les trois
directions de l’espace ont les mêmes propriétés ; on dit que, dans ces référentiels, l’espace est isotrope.
Notons que le référentiel terrestre R est approximativement galiléen mais non inertiel, puisqu’un
corps abandonné dans R tombe en chute libre.
Remarque : Si les forces de gravitation peuvent être négligées, par exemple pour les particules chargées dans un champ électromagnétique (cf. chapitre 8), l’anisotropie provoquée par la
présence de la Terre est négligeable et le référentiel galiléen peut être considéré comme
inertiel. C’est probablement pour cette raison que certains auteurs emploient, dans ce cas,
indifféremment les qualificatifs galiléen ou inertiel.
VI . 2 . — Loi fondamentale de la dynamique dans un référentiel tombant en chute libre
Appliquons la loi fondamentale de la dynamique à un corpuscule A, par rapport au référentiel non
galiléen R , en translation et en chute libre par rapport à un référentiel galiléen R.
117
Référentiels non galiléens. Dynamique terrestre
Dans R , d’accélération aO = g, la force d’inertie de Coriolis est nulle, puisque V R /R = 0,
et la force d’inertie d’entraînement se réduit à −maO . En désignant par Foc une force supplémentaire
occasionnelle, il vient :
d p
= mg − ma O + Foc
dt
d p
= Foc
dt
d’où
puisque la force d’inertie d’entraînement compense le poids mg. Si Foc = 0, alors p = Cte.
Ainsi, les référentiels tels que R , en translation et en chute libre par rapport à un référentiel
galiléen, sont inertiels.
VI . 3 . — Loi fondamentale de la dynamique dans un vaisseau spatial
Considérons un vaisseau spatial, en mouvement de translation accélérée par rapport à un référentiel
galiléen, sous l’action des seules forces de gravitation exercées par les différents astres : le vaisseau
évolue donc dans l’espace interplanétaire, moteurs coupés (Fig. 7.19).
z0
z0
R
0
C
y0
x0
T
x0
y0
R
c Dunod – Toute reproduction non autorisée est un délit
F IG . 7.19.
La loi fondamentale de la dynamique, appliquée à un corpuscule A, par rapport au référentiel R ,
lié au vaisseau spatial, donne, en introduisant le champ de gravitation G produit par tous les astres :
d p
= mG (A) − mae + Foc
dt
la force d’inertie de Coriolis étant nulle du fait de la translation. Or, l’application de la loi fondamentale
de la dynamique au vaisseau, assimilé à son centre de masse C, de masse M, fournit l’équation (cf.
chapitre 13) :
MaC = MG (C) soit a C = G (C)
Comme, dans un mouvement de translation, l’accélération d’entraînement est celle de n’importe quel
point du vaisseau, on a : a e = a C. Il en résulte :
d p
= m[G (A) − G (C)] + Foc
dt
Les points A et C étant très voisins, on a : G (A) ≈ G (C)
d’où
d p
≈ Foc .
dt
On obtient un résultat analogue au précédent, mais plus général : le référentiel R , associé à un
vaisseau interplanétaire, en mouvement de translation par rapport au référentiel de Copernic R0, sous
l’action des seules forces de gravitation, est un référentiel qui n’est pas galiléen mais inertiel. Dans R ,
les seules forces à prendre en compte, pour étudier le mouvement d’un point matériel, sont les forces
occasionnelles ; si ces dernières sont nulles, ce mouvement est rectiligne uniforme. C’est ce qui se passe
dans une cabine spatiale : les objets abandonnés gardent leur état de repos ou de mouvement.
118
7. Référentiels non galiléens. Dynamique terrestre
Remarques : (1) Dans de tels référentiels, où il y a impesanteur, on ne détermine la masse m d’un corps
qu’en mesurant sa masse inerte. Cette dernière s’obtient par exemple à l’aide de la période
d’oscillation T 0 d’un pendule élastique dont on connaît la raideur : on a v 20 = K /m et
T0 = 2p/v0, d’où m = KT02/(4p2 ) (cf. chapitre 10).
(2) La différence entre les champs de gravitation en A et en C, G(A) − G(C), est
un terme de marée à l’intérieur de la cabine spatiale, que l’on néglige généralement en
première approximation.
VI . 4 . — Point de vue de la relativité générale
La propriété commune à la force de gravitation et aux forces d’inertie d’être proportionnelles à la
masse a conduit Einstein, en 1915, à proposer, dans la théorie de la relativité générale, l’abandon de la
prise en compte de la gravitation en tant que force, au profit d’une description en termes de structure
géométrique de l’espace-temps (cf. Relativité et invariance) ; on dit alors que la gravitation se manifeste
par une courbure de l’espace-temps.
CONCLUSION
Rappelons les principaux résultats.
(1) La formulation de la loi fondamentale de la dynamique du corpuscule est invariante par changement de référentiel, à condition d’ajouter, aux forces produites par les corps situés à proximité, les
forces d’inertie d’entraînement et de Coriolis. Ainsi exprimée, cette loi ne privilégie plus les référentiels galiléens :
F ie = −mae
et
FiC = −ma C = −2mV × vA/R
V étant le vecteur vitesse de rotation de R non galiléen par rapport au référentiel galiléen R.
(2) Le poids terrestre d’un corps est une combinaison de la force de gravitation et de la force
d’inertie d’entraînement :
F p = m ∗G − ma e
En tenant compte de l’identité des masses grave et inerte et en explicitant, on obtient l’expression suivante du champ de pesanteur terrestre :
g = G T (A) + V2T HA + Ga(A) − G a (T )
Les deux derniers termes permettent d’expliquer l’existence de deux marées par jour sur la côte atlantique française.
(3) La nature non galiléenne du référentiel terrestre permet d’expliquer la déviation des masses de
fluide vers la droite dans l’hémisphère nord ainsi que quelques expériences précises faites au milieu du
XIXe siècle. Rigoureusement la loi fondamentale dans un référentiel terrestre a pour expression :
maA/R =
F oc + mg − 2mV T × v
C’est la force de Coriolis terrestre qui permet d’interpréter le comportement du pendule de Foucault et
la déviation vers l’est des particules lors d’une chute.
(4) Pour la plupart des besoins pratiques et techniques, on peut considérer que le référentiel terrestre
constitue une très bonne approximation d’un référentiel galiléen, pourvu que l’on introduise le concept
de poids et que les vitesses soient inférieures à 700 m . s−1 .
(5) Dans un référentiel R , en mouvement accéléré par rapport au référentiel terrestre R, la
combinaison naturelle du champ de pesanteur terrestre et de l’accélération d’entraînement de R par
rapport à R donne le champ de pesanteur apparent :
ga = g − ae
Le cas singulier où ga = 0 correspond à l’impesanteur.
119
Référentiels non galiléens. Dynamique terrestre
(6) Les référentiels inertiels sont les référentiels dans lesquels on peut réaliser le principe d’inertie :
un corpuscule abandonné garde son état de repos ou de mouvement rectiligne uniforme s’il est isolé
ou pseudo-isolé. Une cabine spatiale en mouvement, moteurs coupés, constitue un référentiel inertiel,
la force de gravitation étant compensée par la force d’inertie d’entraînement. Ce résultat souligne la
singularité de l’interaction de gravitation par rapport aux autres forces fondamentales et sa relation
étroite avec les forces d’inertie. Il est à la base de la théorie de la relativité générale.
EXERCICES ET PROBLÈMES
P7– 1. Angle entre G et g
Déterminer, en fonction de la latitude l, l’angle a que fait la verticale du lieu avec la direction
du champ de gravitation. À quelle latitude la valeur de a est-elle maximale ? Calculer l’angle a à
Toulouse (l = 43 ◦35 ).
P7– 2. Influence de la force de Coriolis sur une balle de fusil
Une balle de fusil est tirée, horizontalement, dans la direction du nord, depuis un point de la Terre,
de latitude l = 43◦ . Sa vitesse initiale est de 1 000 m . s−1.
1. Calculer la position de l’impact sur une cible située à 100 m, en ne tenant compte que de la
force de pesanteur.
2. Étudier qualitativement l’influence de la rotation de la Terre sur le mouvement du projectile.
3. Donner les équations différentielles du mouvement en négligeant la résistance de l’air mais en
tenant compte de la rotation de la Terre.
4. Trouver, en cm, la déviation vers l’est due à la rotation de la Terre autour de l’axe des pôles ?
P7– 3. Analyse quantitative du mouvement d’un pendule de Foucault
c Dunod – Toute reproduction non autorisée est un délit
On considère un pendule simple constitué d’une masselotte A (masse m = 30 kg) suspendue à
l’extrémité inférieure d’un filin, de longueur l = 67 m. L’autre extrémité est fixée en un point O1 placé
à une hauteur égale à l sur la verticale du lieu de latitude l (Fig. 7.12).
1. Expliciter l’équation du mouvement dans la base du référentiel terrestre local R = Oxyz, Oz
étant la verticale ascendante et Ox l’axe local orienté vers l’est. On exprimera la tension du fil sous la
forme FT = −F T O 1A/l.
2. En négligeant les mouvements verticaux, trouver les équations différentielles suivantes qui régissent le mouvement dans le plan horizontal :
ẍ − 2V T sin l ẏ + v 20x = 0 et
ÿ + 2V T sin l ẋ + v20 y = 0
VT étant la vitesse de rotation de la Terre autour de l’axe des pôles et v20 = g/l.
3. Résoudre le système d’équations différentielles précédent, sachant qu’initialement x = x m ,
y = 0, ẋ = 0 et ẏ = 0. On utilisera la méthode complexe en posant z = x + iy avec i2 = −1.
4. Quelle est la forme de la solution dans le système d’axes tournant autour de la verticale avec la
vitesse angulaire VT sin l dans le sens nord-est-sud-ouest ? En déduire la durée T d’un tour complet
de ce système d’axes tournants. Calculer T pour différentes latitudes : l = 90 ◦ (pôles), l = 43◦ 35
(Toulouse) et l = 0◦ (équateur).
120
7. Référentiels non galiléens. Dynamique terrestre
P7– 4. Mouvement d’une masselotte dans un véhicule accéléré
Un véhicule a un mouvement de translation uniforme de vitesse v sur une route curviligne d’équation cartésienne y = f (x). On lui associe un référentiel R1 = O 1xyz, en translation par rapport au référentiel terrestre R = Oxyz. Une masselotte A, de masse m, liée à l’origine O1 par un ressort de
raideur K, de longueur naturelle l0, évolue le long de l’axe O1 y.
1. Montrer que la composante cartésienne, suivant la verticale ascendante Oy, de l’accélération de
O1 dans R s’écrit
v 2f
y1
(1 + f 2 )2
y
A
f et f désignant les dérivées première et seconde de f par rapport à x.
2. Écrire l’équation différentielle à laquelle satisfait le mouveK
S
x1
ment de A dans R1.
O1
h
3. Calculer la tension T du ressort dans le cas où, en raison M
M2
1
O
d’une force supplémentaire de frottement visqueux, A acquiert rax
2l
pidement une position d’équilibre dans R1 . Comparer alors T au
poids, dans les cas où la route forme une bosse ou un creux. Conclure,
F IG . 7.20.
en utilisant la notion de poids apparent.
4. Le profil de la route forme une bosse assimilable à un arc de parabole, M 1SM 2, dont les caractéristiques sont données sur la figure 7.20. Pour quelle valeur de la vitesse y a-t-il impesanteur en S ?
P7– 5. Pendule de Schüler
On transporte, dans un véhicule, un pendule simple O A (longueur l) dont le point de suspension
est fixe par rapport au véhicule R . Par rapport au référentiel terrestre R, le véhicule a une trajectoire circulaire dont le centre est celui T de la Terre et dont le rayon est approximativement son rayon
RT = 6 400 km.
O
1. Écrire vectoriellement le théorème du moment cinétique pour le pendule, au point de suspension
O . Quelle doit être la vitesse de rotation angulaire V de R par rapport à R pour que la direction de
O A soit fixe dans R ?
2. Quelle est, dans R, la période de ce pendule ?
P7– 6. Influence de la force de Coriolis terrestre sur le lit d’un fleuve
On souhaite estimer l’influence de la force de Coriolis terrestre sur l’inclinaison du lit d’un fleuve,
de largeur L = 300 m , qui s’écoule vers le nord à la vitesse v 0 = 2 m.s−1 en un point de la surface de
la Terre de latitude l = 43, 5 ◦ . On désigne par R le référentiel terrestre local dans lequel Oz est la
verticale ascendante, Oy l’axe orienté vers le nord et Ox l’axe suivant l’est du lieu.
1. Écrire, sous sa forme vectorielle rigoureuse, la loi fondamentale de la dynamique appliquée à
un point A , de masse m , en mouvement horizontal par rapport à R , sous l’action notamment de
son poids et de la réaction R qu’exerce sur lui son environnement. Comment est orientée la force de
Coriolis locale ?
2. Quelles sont les trois équations du mouvement ? Que deviennent-elles pour le problème considéré ?
3. Exprimer les composantes de la réaction R . En déduire la dénivellation entre les deux rives du
fleuve.
121
Référentiels non galiléens. Dynamique terrestre
P7– 7. Chute des corps et relativité générale
On étudie la chute des corps dans un référentiel terrestre, en analysant différentes expériences
historiques, effectuées successivement par Galilée en 1602, Newton en 1687, Guglielmini en 1791 à
Bologne ( lG = 44, 5◦ ), Benzenberg en 1802 à Hambourg ( l B = 53, 5◦ ), Reich en 1831 à Freiberg
( lR = 50, 9◦ ), Hall en 1902 à Harvard ( lH = 42, 5 ◦ ) et Flammarion en 1903 à Paris ( l F = 48, 8◦ ).
Pour cela, on analyse la chute d’une bille, de masse m , abandonnée (sans vitesse initiale) d’une
hauteur H , à un instant pris comme origine. Dans les expériences précédentes, les hauteurs de chute
étaient respectivement :
HG = 78, 3 m
H B = 76, 3 m
HR = 158, 5 m
HH = 23, 0 m
HF = 68, 0 m
1. a) Rappeler l’écriture rigoureuse de la loi fondamentale par rapport au référentiel terrestre ;
b) Expliciter les quatre termes vectoriels qui composent le champ de pesanteur terrestre g , en
donnant la signification physique de chacun d’entre eux, et rappeller la définition de la verticale. Dans
la suite, on prendra g = 9, 80 m.s−2 .
c) Retrouver, en la justifiant, l’équation simplifiée de la chute libre, telle qu’elle a été analysée par
Galilée et Newton. En déduire vz (t) et z(t) . Quelle est la durée de chute la plus grande parmi les cinq
expériences précédentes ? Calculer sa valeur.
d) En comparant l’équation différentielle simplifiée précédente à celle que l’on obtiendrait en soumettant une bille, de même masse, mais de charge électrique q , à un champ électrique constant E , dites
en quoi consiste la singularité fondamentale de la force de gravitation, à l’origine de la théorie de la Relativité Générale.
2. Les expériences de Guglielmini, Benzenberg, Reich, Hall et Flammarion ont établi que la chute
des corps s’accompagnait d’une déviation par rapport à la verticale.
a) Montrer que la trajectoire de la bille s’écarte légèrement de la verticale, dans un sens que l’on
précisera, d’abord dans l’hémisphère nord, ensuite dans l’hémisphère sud. En quels endroits de la surface de la Terre cette déviation est-elle maximale ou minimale ?
b) Établir l’expression vectorielle approchée suivante de l’accélération de la bille, que l’on obtient
en négligeant les composantes de la vitesse dans un plan horizontal :
c Dunod – Toute reproduction non autorisée est un délit
a = g + 2gt VT cos l ex
ex étant un vecteur unitaire que l’on définira au lieu considéré.
c) Quelle est la composante a x , suivant l’axe Ox , de l’accélération de A ? En déduire, selon ce
même axe, la vitesse vx et la déviation x par rapport à la verticale.
d) Trouver les expressions approchées suivantes de v x et x , après une chute de hauteur H :
v x = 2HVT cos l
et
x=
8H 3
9g
1/2
VT cos l
e) Les valeurs expérimentales de x , mesurées par Gulielmini, Benzenberg, Reich, Hall et Flammarion, furent, respectivement :
xG = 1, 9 cm
xB = 0, 9 cm
xR = 2, 8 cm
xH = 0, 15 cm
x F = 0, 63 cm
Selon vous, comment concrètement la déviation a-t-elle été mesurée ? Calculer les valeurs des déviations
prédites par la théorie. Commenter l’écart entre expérience et prévision théorique.
122
7. Référentiels non galiléens. Dynamique terrestre
3. Appliquer la loi fondamentale à la bille par rapport au référentiel R , en translation, rectiligne,
mais en chute libre par rapport à R . Ce référentiel non galiléen est qualifié d’inertiel, ou de naturel par
Einstein. Pourquoi ? Que peut-on dire, dans ce référentiel R , de la déviation étudiée précédemment
dans R ?
P7– 8. Effet Eötvös
On appelle effet Eötvös, du nom du physicien hongrois Loránd Eötvös, la différence qui existe
entre le champ de pesanteur gb,e mesuré à bord d’un bateau naviguant sur l’océan, vers l’est, avec une
vitesse vb,e et le champ analogue g b,o mesuré le bateau se dirige vers l’ouest, à la même vitesse. Pour
comparer ces champs au champ de pesanteur terrestre mesuré en un point fixe de la surface de la Terre,
on accroche une masselotte, de masse m , à l’extrémité inférieure d’un ressort, l’extrémité supérieure
étant liée à un point fixe du bateau. Dans l’expérience réalisée par Eötvös, en 1908, sur la Mer noire
(latitude l = 45◦ ), m = 10 kg et v b,e = 25 m.s−1 .
1. Rappeler la définition expérimentale du poids terrestre d’un corpuscule A , ainsi que la relation
entre le champ de pesanteur g , le champ de gravitation G et l’inertie, en négligeant l’influence des
marées.
2. a) On introduit le référentiel R b = Txb ybz0 , lié au bateau B , tel que Tz0 coïncide avec l’axe de
révolution de la Terre, Txb soit défini par la position B du bateau et Tyb orienté vers l’est (Fig. 7.21).
Montrer que, dans Rb , la relation précédente devient :
g b,e = G + V2b,e KB
K étant la projection de B selon l’axe de révolution de la Terre et V b,e une vitesse angulaire que l’on
déterminera en fonction de la vitesse de rotation de la Terre autour de son axe VT , de v b,e , du rayon
terrestre RT et de la latitude l du lieu.
b) Exprimer la différence g b,e − gb,o . En déduire la projection de cette différence vectorielle selon
la verticale du lieu et calculer sa valeur. Quelle erreur relative fait-on en négligeant cet effet ?
c) Cet effet dépend-il de l’hémisphère ? Qu’obtiendrait-on si le bateau se dirigeait vers le nord ou
vers le sud ?
d) Comparer cet effet à la force de Coriolis qui s’exerce sur l’unité de masse du bateau. Commenter.
z0
ΩT
K
B
v b,c
y
b
T
¸
Rb
xb
x0
Rg
F IG . 7.21.
y0
8
Particule chargée dans un champ
électromagnétique stationnaire
L’étude du mouvement d’une particule chargée dans un champ électromagnétique présente un intérêt considérable en physique, puisque son champ d’application est celui de l’optique corpusculaire et des
grands accélérateurs de particules. Nous allons centrer notre analyse principalement sur les champs uniformes et stationnaires ; en outre, ces champs seront supposés suffisamment faibles pour que le domaine
de validité soit strictement newtonien, lequel est défini par des vitesses de particules très inférieures à
c ≈ 3 × 108 m . s−1 . Le prolongement naturel de cette étude relève de la relativité restreinte (cf. Relativité et invariance).
Le point de départ est la loi fondamentale de la mécanique newtonienne dans le référentiel galiléen
du laboratoire :
dp
= ma = F
dt
où p = mv est la quantité de mouvement de la particule et F la force exercée par le champ électromagnétique (E, B) ; en effet, on sait que la pesanteur est négligeable devant l’interaction électromagnétique, ce qui rend R inertiel avec une excellente approximation (cf. chapitre 7).
c Dunod – Toute reproduction non autorisée est un délit
Nous allons tout d’abord rappeler l’écriture de la force Lorentz qui s’exerce sur une particule
chargée.
I . — FORCE DE LORENTZ
Considérons un système de charge et de courant qui crée, en une région de l’espace, un champ
électrique et un champ magnétique, tous deux uniformes et stationnaires. Sans entrer dans le détail
d’une telle réalisation, rappelons seulement que le condensateur plan et le solénoïde long produisent,
respectivement avec une bonne approximation, de tels champs électrique et magnétique (Fig. 8.1).
B
+ + + + + + + + +
d
E
− − − − − − − − −
+
−
U
I
+
R
a)
b)
F IG . 8.1.
−
124
8. Particule chargée dans un champ électromagnétique stationnaire
Les champs obtenus s’écrivent (cf. Électromagnétisme) :
i) E = U /d, U étant la différence de potentiel entre les deux plaques du condensateur distantes
de d,
ii) B = m 0nI où m 0 = 4p × 10−7 SI, I étant l’intensité du courant et n le nombre de spires par
unité de longueur.
La force de Lorentz qui s’exerce sur une particule A, de charge q et de vitesse v par rapport à un
référentiel terrestre, a pour expression :
F = q(E + v × B)
On voit que, pour une vitesse de l’ordre de c/10, un champ magnétique de valeur 0, 01 T, ce que l’on
réalise aisément, est aussi efficace qu’un champ électrique E de valeur B × v = 3 × 10 5 V . m−1 .
Cette force est bien plus intense que le poids ; par exemple, alors que le poids d’un électron est
meg ≈ 8, 8 × 10 −30 N, une valeur typique de la force électrostatique est celle produite par un champ
E = 0, 3 MV . m−1 sur la charge élémentaire e : Fe = eE ≈ 4, 8 × 10 −14 N.
II . — PARTICULE CHARGÉE DANS UN CHAMP ÉLECTRIQUE
II . 1 . — Équations du mouvement
Considérons une particule, pénétrant avec une vitesse v 0 dans une région où règne une champ électrique E. Choisissons, pour la commodité, le plan Oxy du référentiel terrestre R tel que O coïncide
avec la position de la particule à l’instant initial (Fig. 8.2) ; et les axes soient tels que le champ électrique E et la vitesse initiale v0 s’écrivent respectivement :
E = E ex
avec
E > 0 et v0 = v0 cos a 0 ex + v0 sin a0 ey
Notons que ce choix ne restreint en rien la généralité de l’étude. L’équation fondamentale de la dynamique s’explicite comme suit dans la base (ex , e y, e z) de R :
dv
= qE
m
dt
donne
y
ẍ
E
m ÿ = q 0
0
z̈
soit
ẍ = a 1
ÿ = 0
z̈ = 0
y
E
O
v+
v−
α0
O
x
F IG . 8.2.
a1 =
E
+
v0
avec
−
x
F IG . 8.3.
Compte tenu des conditions initiales (v 0 et r 0 = 0), il vient :
ẋ = a1 t + v 0 cos a 0
ẏ = v0 sin a0
ż = 0
a1 2
t + (v0 cos a 0)t
2
y = (v 0 sin a0 ) t
x=
d’où
z = Cte = 0
qE1
m
125
Particule chargée dans un champ électromagnétique stationnaire
La trajectoire, qui est contenue dans le plan Oxy, s’obtient en éliminant le temps entre les deux premières équations :
x=
a1
y2
y
+
2 v02 sin2 a 0
tan a 0
avec
a1 =
qE
m
C’est une parabole passant pas O, puisque x = 0 pour y = 0. La figure 8.2 correspond à une particule
de charge positive.
II . 2 . — Cas où v0 est colinéaire à E
Si l’angle a 0 est nul, on trouve évidemment :
x=
a1 2
t + v0 t
2
ẋ = a1 t + v 0
y=0
et
ẏ = 0
Exemple : Un proton (charge e), initialement au repos, est accéléré par un champ de 30 kV . m −1 ,
pendant 1 ns. Il acquiert ainsi l’accélération et la vitesse suivantes (Fig. 8.3) :
a+ =
eE
eE
= 2, 87 × 1012 m . s −2 et v + =
t = 2, 87 × 103 m . s −1
mp
mp
Pour un électron (charge −e), l’accélération et la vitesse acquises sont :
eE
eE
a− = −
= −5, 27 × 1015 m . s −2 et v − = − t = −5, 27 × 10 6 m . s −1
me
me
II . 3 . — Cas où v0 est normal au champ E. Déviation électrique de la trajectoire
Si v 0 est normal à E, il vient, en faisant a 0 = p/2 (Fig. 8.4) :
c Dunod – Toute reproduction non autorisée est un délit
x=
a1 t2
2
ẋ = a1 t
y = v0 t
ẏ = v 0
Supposons que la zone d’action du champ (E non nul) soit définie par : 0 y Le. La trajectoire,
qui est rectiligne pour y < 0, est déviée de l’angle ue . Évaluons cet angle : la particule sort de la zone
à l’instant t = Le /v0 :
a L2
a Le
xs = 1 2e et ẋ s = 1
v0
2v 0
On en déduit l’angle de déviation (algébrique) ue relié aux coordonnées par l’équation :
tan u e = −
ẋs
a1L e
=− 2
v0
ẏs
d’où
tan u e = −
qEL e
mv02
Sur la figure 8.4, la charge de la particule est positive et donc l’angle ue négatif. Pour un électron, de
vitesse initiale v0 = 5, 27 × 10 6 m . s −1 et accéléré par un champ E = 3 kV . m −1 dans une région où
L e = 10−2 m, on trouve : tan u e ≈ ue = 0, 19 ≈ 10◦.
126
8. Particule chargée dans un champ électromagnétique stationnaire
y
µe
A
O
+++++++++
S
y
Zone d'action
de E
Le
E
¼=2
x
v0
E
F
A
P
v
O
Électron
F IG . 8.4.
®0
x
d
F IG . 8.5.
II . 4 . — Propriétés de focalisation du champ électrique
Considérons une source qui émet des électrons en O, autour d’une direction moyenne avec une
vitesse moyenne de v 0 (Fig. 8.5) : l’angle de (e x , v 0) s’écrit initialement a 0 + ε avec |ε| a 0 .
D’après ce qui précède, puisque a1 est négatif et a0 = p/2, on peut écrire :
x=
−eE
y2
y
+
2
2m v 20 sin a0
tan a0
Cherchons le point d’intersection F de la trajectoire avec l’axe Oy :
xF = 0 entraîne
1
−eEy F
mv 20
=
0
soit
y
sin(2a0 )
+
=
F
tan a0
eE
2mv20 sin 2 a0
On voit que yF est maximal pour a0 = p/4. Développons y F au voisinage de a 0 = p/4 :
yF = (y F)0 +
d yF
da
(a − a0 )
+
1!
d2 yF
d a2
(a − a0 )2
2!
avec
(y F)0 = yF (a 0) =
mv20
eE
Comme (d yF / d a) 0 = 0, y F = (yF )0 quel que soit ε, au second ordre près. Il y a donc focalisation
en F du faisceau issu de O. Ces propriétés sont utilisées dans les spectromètres électrostatiques pour
électrons. Dans ce cas, on a, en F pour a = p/4 :
2Ek
mv20
d
=
eE
eU
si U désigne la différence de potentiel entre les électrodes et d la distance qui les sépare. Le système
précédent peut donc servir à séparer des électrons d’énergies cinétiques initiales différentes. On définit
alors la dispersion en énergie :
2d
Dy
De = F =
DEk
eU
Remarquons que xmax doit être inférieur à d/2 pour que les électrons issus de O n’atteignent pas les
électrodes. Déterminons la position du sommet P de la parabole :
yF=
dx
dy
P
=0=−
1
mv20
yP
+
2
eE v20 sin a0 tan a0
Par conséquent :
soit
yP =
mv 20 sin(2a 0) y F
=
2
2
eE
mv02
d
entraîne Ek < eU
<
4eE
2
Ce spectromètre ne présente donc d’intérêt que pour des électrons d’énergie cinétique initiale assez
faible.
xP =
127
Particule chargée dans un champ électromagnétique stationnaire
III . — PARTICULE CHARGÉE DANS UN CHAMP MAGNÉTIQUE
III . 1 . — Équation du mouvement
Choisissons l’axe Oz du référentiel terrestre R = Oxyz suivant B et Ox dans le plan que fait B
avec la vitesse initiale de la particule chargée A : v0 = v0 cos a0 ez + v 0 sin a 0 e x , ce qui simplifie les
calculs sans restreindre la généralité du problème (Fig. 8.6). La trajectoire représentée est relative à un
électron (q = −e < 0, R < 0).
z
Électron
A
B
α0
h
y
O
v0
x
F IG . 8.6.
D’après la loi fondamentale de la dynamique appliquée à la particule, on a :
m
dv
= qv ×B
dt
dv
= vc (v × e z)
dt
soit
en posant
vc =
qB
m
La quantité vc, homogène à l’inverse d’un temps, est appelée la pulsation cyclotron. Notons qu’ainsi
définie c’est une quantité algébrique dont le signe dépend de celui de la charge. En explicitant dans la
base de R, on obtient :
ẍ
ÿ
z̈
= vc
ẋ
ẏ
ż
×
0
0
1
soit
ẍ = vc ẏ
ÿ = −vc ẋ
z̈ = 0
La troisième équation s’intègre sans difficulté, compte tenu des conditions initiales :
c Dunod – Toute reproduction non autorisée est un délit
ż = Cte = v0 cos a 0
d’où
z = (v0 cos a 0) t
Pour résoudre le système constitué par les deux premières équations différentielles, intégrons la
deuxième équation : ẏ = −vc x + Cte = −vc x , car initialement ẏ = 0 lorsque x = 0. En remplaçant ẏ dans la première, on obtient :
ẍ + v2c x = 0
La solution de cette équation est bien connue (cf. annexe 3) : x = A cos(v ct + f). En tenant compte
des conditions initiales, il vient :
(x)0 = A cos f = 0 et (ẋ)0 = −vc A sin f = v 0 sin a0
ce qui donne f = p/2, A = (−v0 sin a0 )/vc et par conséquent x = (v0 sin a0 /v c) sin(vc t). On en
déduit : ẏ = −(v 0 sin a0) sin(vc t). Il en résulte, en intégrant :
y=
v0 sin a 0
cos(vc t) + Cte
vc
soit
y=−
v 0 sin a0
[1 − cos(vc t)]
vc
128
8. Particule chargée dans un champ électromagnétique stationnaire
puisqu’à t = 0, y = 0. Ainsi, les équations paramétriques de la trajectoire sont :
x=
v 0 sin a0
sin(vc t)
vc
y=−
v 0 sin a0
[1 − cos(v c t)]
vc
z = (v0 cos a0 ) t
Les deux premières équations s’écrivent aussi :
x = R sin(vc t)
et y = −R[1 − cos(vc t)]
en posant
R=
mv 0 sin a0
p⊥
v0 sin a 0
=
=
qB
qB
vc
Notons que la norme de la vitesse reste constante au cours du mouvement, ce que l’on établit rapidement
à partir du théorème de l’énergie cinétique, puisque la force magnétique ne travaille pas.
Remarque : Il existe une autre méthode d’intégration du système différentiel formé par les deux premières équations différentielles. Elle consiste à poser x = x + j y ( j 2 = −1) et à effectuer la somme des deux premières équations une fois la deuxième multipliée par j. On
obtient alors : ẍ = −jv c ẋ, ce qui donne, compte tenu des conditions initiales :
ẋ = (v0 sin a0 ) exp(−jv c t)
et x =
jv 0 sin a0
[exp(−jvc t) − 1]
vc
En séparant les parties réelle et imaginaire, on retrouve les résultats précédents.
III . 2 . — Trajectoire
Si on élimine t entre x et y, on obtient :
x2 + (y + R) 2 = R
2
C’est l’équation d’un cercle de rayon R = |R| dont le centre C a pour coordonnées (0, −R). Ainsi, le
mouvement d’une particule dans un champ magnétique est la composition d’un mouvement circulaire
uniforme dans le plan normal à B et d’un mouvement rectiligne uniforme suivant B. C’est donc un
mouvement hélicoïdal de pas :
h=
p
2pv0 cos a0
= 2p
vc
qB
p étant la quantité de mouvement suivant la direction de B.
La quantité B R = (mv0 sin a0)/q = p⊥ /q est appelée la rigidité magnétique. Elle est égale à la
quantité de mouvement de la particule dans le plan perpendiculaire à B par unité de charge.
Exemple : Calculons v c pour un électron dans un champ magnétique de 10 mT :
vc ≈ −
1, 6 × 10 −19 × 10−2
≈ −1, 76 × 10 9 rad . s−1
0, 91 × 10−30
Si cet électron a une vitesse de 107 m . s−1 , perpendiculaire au champ, la rigidité magnétique est :
BR ≈
0, 9 × 10−30 × 10 7
≈ 5, 6 × 10 −5 T . m = 5, 6 mT . cm
1, 6 × 10−19
Ainsi, avec un champ de 1 mT, la valeur de R est 5, 6 cm.
129
Particule chargée dans un champ électromagnétique stationnaire
III . 3 . — Déviation magnétique de la trajectoire d’une particule chargée
Il s’agit d’évaluer l’efficacité d’un champ magnétique pour courber la trajectoire d’une particule
chargée. Dans le cas d’une particule, de charge positive, de vitesse initiale v0 portée par Ox et perpendiculaire à B, la trajectoire est une portion de cercle OS limitée par la zone d’action de B (Fig. 8.7).
Au-delà de S, la trajectoire est une droite. Notant L m la longueur de l’arc OS, il vient : u m = OS/R
avec R = |mv0 /qB| et OS = L m. Par conséquent :
um =
qBL m
mv0
Notons que um augmente comme 1/v 0, en raison de la proportionnalité de la force magnétique et de
la vitesse, alors que ue varie comme 1/v20 .
y
Zone d'action
de B
θm
z
A
v0
B
Lm
O
α0
θm
B
y
S
O
v0
x
x
F IG . 8.7.
F IG . 8.8.
III . 4 . — Focalisation magnétique
a) Focalisation axiale (suivant B)
c Dunod – Toute reproduction non autorisée est un délit
Considérons un faisceau de particules, légèrement ouvert, issues d’un point source O et se dirigeant en moyenne suivant la direction z du champ magnétique B : l’angle maximal que font les
trajectoires issues de O avec la direction de B est très petit : a 0 1 (Fig. 8.8). D’après son expression, le pas de l’hélice varie peu avec a 0 ; en effet :
2pmv0
2pmv 0 2
Dh = −
sin a 0 Da 0 ≈ −
a0 d’où Dh ≈ 0
qB
qB
au deuxième ordre près en a 20. Un pinceau de particules est donc focalisé par un champ magnétique
parallèle à sa direction moyenne.
b) Focalisation radiale (normale à B)
Si le faisceau de particules entre dans une région où règne un champ magnétique B, avec une
vitesse normale à B, il suffit d’imposer a 0 = p/2 dans les solutions précédentes. Le mouvement est
alors circulaire. Sur la figure 8.9, les particules sont des électrons. En réalité, toutes les particules n’ont
pas leur vitesse initiale suivant Ox ; seule la direction moyenne du faisceau coïncide avec Ox.
y
O
εF
B
2R
v0
O
F IG . 8.9.
ε
x
130
8. Particule chargée dans un champ électromagnétique stationnaire
Considérons le point F, intersection avec l’axe Oy de la trajectoire circulaire d’une particule dont
la vitesse initiale fait l’angle ε, avec l’axe Ox. Comme ε est petit, yF = 2R cos ε = 2R(1 − ε2 /2).
La distance qui sépare F de Fm, défini par ε = 0, est donc :
DyF = yF,m − yF ≈ Rε 2
d’où
Dy F ≈ 0
au second ordre près en ε. Ainsi, yF ne change pratiquement pas lorsque ε varie, ce qui prouve que
le système a des propriétés de focalisation. On définit alors la dispersion en énergie d’un tel système,
utilisé en spectromètre magnétique, par (cf. Optique) :
De =
2m 1
DyF
Dy F Dv 0
R
=
=
=
DEk
Dv0 DEk
|q|B mv0
Ek
puisque
yF ≈ 2R = 2
mv 0
|q|B
et Ek =
1 2
mv
2 0
IV . — CHAMPS ÉLECTRIQUE ET MAGNÉTIQUE SIMULTANÉS
Une particule (masse m, charge q) pénètre en I, avec une vitesse v 0 , dans une région où règnent
un champ électrique E et un champ magnétique B, normaux à v 0 (Fig. 8.10).
IV . 1 . — Champs électrique et magnétique parallèles
Si les champs E et B sont parallèles, les angles de déviation électrostatique (dans le
plan Izx) et magnétique (dans le plan Iyz) ont pour expressions respectives :
qEL e
qBL m
ue =
et um =
2
mv 0
mv0
En éliminant v0, on trouve l’expression suivante de la charge massique de la particule :
q
E Le u2
= 2 2 m
m
B L m ue
Pour déterminer q/m, il suffit donc de recevoir les particules sur un écran luminescent OXY parallèle
au plan Ixy. Les coordonnées X et Y du point d’impact permettent de déterminer respectivement u m
et ue et par conséquent le rapport q/m. Historiquement, cette méthode a contribué à dégager le concept
d’électron.
Zone d'action de E et B
x
I
y
v0
Y
X
E
A
S
E
x
X
B
S
O
z
y
v0
z
F
Fente
A
B
F IG . 8.10.
Y
F IG . 8.11.
IV . 2 . — Champs électrique et magnétique perpendiculaires
Une source S envoie des particules chargées avec une vitesse v 0 = v 0 ex , dans une région où
règnent un champ électrique E = E ex et un champ magnétique B = B e y perpendiculaires entre eux
131
Particule chargée dans un champ électromagnétique stationnaire
(Fig. 8.11). La loi fondamentale appliquée à une particule, de masse m et de charge q, donne :
ma = q(E + v × B)
d’où : a = a1 e x + vc v × e y avec a1 = qE/m et vc = qB/m.
a) Solution générale
Il vient, en explicitant dans une base associée au référentiel du laboratoire R :
ẍ
ÿ
z̈
= a1
1
0 + vc
0
ẋ
ẏ ×
ż
0
1
0
soit
ẍ = a1 − v c ż
ÿ = 0
z̈ = v c ẋ
La deuxième équation s’intègre sans difficulté, compte tenu des conditions initiales :
ẏ = Cte = 0 d’où y = Cte = 0
Pour résoudre le système constitué par les deux autres équations différentielles, intégrons la troisième
équation : ż = vc x + Cte = v cx + v 0 , car initialement ż = v 0 lorsque x = 0. En remplaçant ż dans
la première, on obtient :
ẍ + v 2c x = a1 − v cv 0
La solution de cette équation est bien connue (cf. annexe 4) : x = A cos(vc t + f) + (a 1 − v cv 0)/v2c .
Avec les conditions initiales, il vient :
(x) 0 = A cos f +
a 1 − vc v0
= 0 et (ẋ)0 = −vcA sin f = 0
v 2c
ce qui donne f = 0, A = −(a1 − v cv 0)/v 2c . Ainsi :
x=
a 1 − vc v 0
v2c
[1 − cos(v ct)]
On en déduit :
ż =
a1 − v c v0
vc
[1 − cos(v ct)] + v0 =
a1
a1 − v cv0
−
cos(v c t)
vc
vc
c Dunod – Toute reproduction non autorisée est un délit
et donc z en intégrant, sachant qu’à t = 0, z = 0 :
z=
a1
v2c
v ct −
a 1 − v c v0
v2c
sin(v ct)
Ainsi, les équations paramétriques de la trajectoire, contenue dans le plan Ozx sont :
z=
a1
v2c
vc t −
a1 − vc v 0
v2c
sin(vc t)
et x =
a1 − vc v0
v2c
[1 − cos(vc t)]
Les courbes correspondantes sont des trochoïdes (cf. Exercices).
b) Trajectoires cycloïdales
Les courbes précédentes deviennent des cycloïdes si les coefficients qui affectent v ct et sin(vc t)
sont égaux en valeur absolue :
a1 = |a1 − v cv 0 |
ce qui est réalisé pour v0 = 0 ou v 0 = 2a1 /vc = 2E/B.
132
8. Particule chargée dans un champ électromagnétique stationnaire
i) Vitesse initiale v 0 nulle
Les équations paramétriques se réduisent à :
z=
E
[v ct − sin(v c t)]
Bv c
et x =
E
Bv c
[1 − cos(vc t)]
Cette courbe a déjà été étudiée (cf. chapitre 2) ; c’est une cycloïde. Elle est représentée en trait plein sur
la figure 8.12.
x
2E
Bv c
0
pE /Bvc
3pE /B vc
z
− 2E
Bv c
F IG . 8.12.
ii) Vitesse initiale v0 égale à 2E/B
Les équations paramétriques se simplifient selon :
z=
E
Bvc
[vc t + sin(vc t)]
et x = −
E
Bv c
[1 − cos(vct)]
La trajectoire est semblable à la précédente (courbe en pointillés sur la figure 8.12). C’est aussi une
cycloïde.
Remarque : Les deux trajectoires se déduisent l’une de l’autre à l’aide d’une simple translation.
V . — APPLICATIONS
V . 1 . — Mesure de la quantité de mouvement d’une particule
L’équation donnant le rayon de courbure de la trajectoire circulaire d’une particule chargée, dans
un champ magnétique perpendiculaire à sa vitesse initiale, permet de comparer les quantités de mouvements de particules de même charge électrique. En effet, on a :
p1
p2
= qB
=
R1
R2
Cette propriété est utilisée dans l’étude des collisions de particules rapides (cf. Relativité et invariance).
V . 2 . — Confinement magnétique
Si le champ magnétique n’est pas uniforme, les particules chargées ont des trajectoires hélicoïdales
dont le rayon et le pas varient d’une région à l’autre. Une analyse détaillée montre que, sous certaines
conditions, une particule peut décrire une hélice dont le pas diminue autour de la direction moyenne du
champ et rebrousser chemin (Fig. 8.13). Ces résultats sont utilisés pour confiner des plasmas à très haute
température.
133
Particule chargée dans un champ électromagnétique stationnaire
+−
Cathode
V
Anode
x
Objet
Ao
Lentille
magnétique
z
z = z0
F IG . 8.13.
Ai
Image
F IG . 8.14.
V . 3 . — Optique corpusculaire
En raison des propriétés de focalisation des champs électrique et magnétique, l’optique corpusculaire constitue, à elle seule, un vaste champ d’application de la dynamique des particules chargées dans
un champ électromagnétique non uniforme.
c Dunod – Toute reproduction non autorisée est un délit
Dans un microscope électronique, les électrons sont émis par une cathode, avec une vitesse initiale
négligeable, par effet thermoélectronique ou à l’aide d’un champ électrique extracteur. Ils sont alors
accélérés vers une anode trouée, portée à un potentiel positif par rapport à la cathode (Fig. 8.14). Lorsque
ce potentiel accélérateur est de 100 kV, ils émergent du canon du microscope avec une vitesse qui est
de l’ordre de 0, 558 c, c étant la vitesse de la lumière dans le vide.
À la sortie du canon les électrons sont soumis à l’action d’électro-aimants qui modifient leurs trajectoires, comme le font les lentilles de verre avec les rayons lumineux. Dans ces lentilles magnétiques,
le champ magnétique n’est pas uniforme mais présente la symétrie de révolution ; il a principalement une
composante axiale suivant l’axe optique et une composante radiale bien plus faible. Comme ce champ
a des propriétés focalisatrices, on obtient une image Ai stigmatique d’un point objet Ao comme en optique. On établit alors une correspondance entre les positions de l’objet et de l’image semblable à celle
donnée par les formules de Descartes (cf. Optique). Signalons aussi que la composante du champ magnétique suivant l’axe optique fait tourner le plan de l’image avec une vitesse angulaire égale à la pulsation de Larmor vL = v c/2 (cf. Exercices).
Enfin, lorsqu’on souhaite analyser l’énergie du faisceau d’électrons dans le plan image, on utilise
un spectromètre magnétique que l’on place à la sortie du microscope ; ce spectromètre est souvent un
prisme magnétique avec des propriétés dispersives analogues à celles d’un prisme en verre (cf. Optique).
V . 4 . — Filtre de Wien
Le filtre de Wien est un instrument qui, grâce à l’action combinée de deux champs perpendiculaires, l’un électrique et l’autre magnétique, permet de filtrer des particules chargées de vitesse et donc
d’énergie déterminées (Fig. 8.11).
On peut choisir E et B de telle sorte que la force de Lorentz, qui s’exerce sur les particules dont
la vitesse est v 0 = v 0 e z, soit nulle :
F = −e(E + v 0 × B) = 0
134
8. Particule chargée dans un champ électromagnétique stationnaire
Il en résulte que seules les particules issues de S avec la vitesse v0 ont une trajectoire rectiligne. En
interposant une fente dans le plan FXY, on filtre les particules qui ont l’énergie mv 20 /2.
Ces filtres d’énergie équipent certains microscopes électroniques, ce qui permet d’obtenir des
images filtrées, c’est-à-dire formées par des électrons qui ont subi une interaction déterminée avec
l’objet observé. On peut alors en déduire des informations sur la constitution physico-chimique de
l’objet.
V . 5 . — Action du champ magnétique terrestre
Le rayonnement cosmique reçu par la Terre est en partie constitué de particules chargées positives.
Celles-ci sont soumises à l’action du champ magnétique terrestre, lequel ressemble à celui produit par
un dipôle magnétique, situé au centre de la Terre (cf. Électromagnétisme).
a) Les ceintures de van Allen
Le champ magnétique terrestre retient dans l’espace un grand nombre de particules chargées provenant du Soleil. Les particules piégées par ce champ forment deux anneaux appelées les ceintures de
van Allen, l’une interne à une altitude d’environ 10 000 km, l’autre externe à une altitude de 60 000 km
(Fig. 8.15). Elles ont été décelées en 1958, par le physicien américain J. van Allen, à l’aide d’instruments placés à bord de satellites artificiels.
Axe
géomagnétique
Ceinture intérieure
Ceinture extérieure
10
20 30
Distance à partir
40 du centre de la Terre (´106 m)
F IG . 8.15.
b) Les aurores polaires
Les particules arrivant suivant l’axe géomagnétique de la Terre, qui fait un angle d’environ 11 ◦
avec l’axe de rotation terrestre, ne sont pratiquement pas déviées ; en revanche, les autres, dont la vitesse fait avec l’axe géomagnétique un angle non négligeable, sont très déviées, au point que seules les
particules de forte énergie peuvent atteindre la surface du sol. Une analyse détaillée montre que les particules venant de l’espace atteignent le sol en s’accumulant dans deux calottes sphériques entourant
les pôles géomagnétiques. Elles produisent alors, par ionisation de l’air, des effets lumineux caractéristiques des aurores polaires. L’étude expérimentale a permis d’établir que ces phénomènes dépendaient
fortement de l’activité solaire, ce qui prouve que les particules chargées tombant du ciel proviennent
principalement du Soleil (vent solaire).
CONCLUSION
Rappelons les principaux résultats.
(1) Dans un champ électrique uniforme, le mouvement d’une particule chargée est parabolique.
(2) Alors que le champ électrique peut modifier la norme de la vitesse, le champ magnétique ne
fait que changer sa direction. Dans un champ magnétique uniforme, le mouvement est la somme d’un
135
Particule chargée dans un champ électromagnétique stationnaire
mouvement rectiligne uniforme suivant la direction du champ et d’un mouvement circulaire uniforme
dans un plan perpendiculaire au champ. Le rayon algébrique de la trajectoire a pour expression :
v 0 sin a 0
p⊥
qB
=
avec v c =
R=
vc
qB
m
(3) Les applications sont très nombreuses (confinement magnétique, microscopie corpusculaire,
accélérateurs de particules, magnétosphère des planètes, etc.).
Notons que la vitesse acquise par une particule, soumise à un champ électrique, est très vite grande
au point que certaines expériences ont été considérées comme des tests de limite de validité de la mécanique newtonienne. Si la vitesse des particules n’est plus négligeable devant la vitesse de la lumière dans
le vide, la loi fondamentale de la dynamique a même forme, mais la quantité de mouvement a une expression plus complexe (cf. Relativité).
EXERCICES ET PROBLÈMES
P8– 1. Réfraction et réflexion en optique corpusculaire
Une cathode K, dont le potentiel est pris égal à 0, émet des électrons avec une vitesse négligeable,
vers deux grilles métalliques G1 et G2 , à mailles fines, planes, parallèles et situées à une distance
d = 0, 07 m l’une de l’autre (Fig. 8.16). Elles sont respectivement portées aux potentiels V 1 = 1 600 V
et V 2 = 900 V. L’électron provenant de K, traverse G1 dans le plan Oxy du référentiel du laboratoire
Oxyz. Sa vitesse v1 est alors contenue dans le plan Ozx et fait l’angle i 1 avec l’axe Oz. On se
propose d’étudier le mouvement d’un électron entre G 1 et G2 où règne un champ électrique uniforme
et stationnaire E orienté suivant Oz.
1. On désigne par i l’angle que fait p avec l’axe des z. Trouver la relation liant i, i 1 , V et V1 .
Quelle analogie optique vous suggère-t-elle ?
2. Étudier le cas où V 2 = V1 sin2 i 1. Que se passe-t-il si V2 < V1 sin 2 i1 ? Analogie optique ?
y
x
c Dunod – Toute reproduction non autorisée est un délit
K
v1
O
i1
G1
+
V1
−
ε
G2
V2
z
O
+
S
x
−
F IG . 8.16.
F IG . 8.17.
P8– 2. Focalisation électrique dans un condensateur cylindrique
Une source ponctuelle S émet des électrons à l’intérieur d’un condensateur cylindrique (Fig. 8.17).
Pour une vitesse d’émission v0 appropriée, un électron décrit une trajectoire circulaire, de rayon r0 ,
concentrique avec les armatures et située à mi-distance entre elles. On se propose d’étudier le mouvement d’un électron émis avec une vitesse voisine de v0 et faisant un angle ε petit avec v0 .
1. Écrire, en coordonnées polaires (r, w), les équations différentielles du mouvement dans un plan
de section du condensateur. On précisera d’abord comment varie le champ électrique E avec r. À
136
8. Particule chargée dans un champ électromagnétique stationnaire
quelle condition sur r0 , w0 et E0 , valeur du champ électrique correspondant, la trajectoire est-elle
circulaire ?
2. On pose Dr = r − r 0. Établir, à l’ordre un, que ẇ = ẇ 0 (1 − Dr/r 0) , w˙ 0 étant la valeur de ẇ,
lorsque la trajectoire est circulaire.
3. Quelle est l’équation différentielle à laquelle satisfait Dr ? Montrer que les trajectoires se recoupent après avoir décrit un certain angle que l’on déterminera.
P8– 3. Canon de microscope électronique
Un canon de microscope électronique est constitué d’une cathode chauffée qui émet des électrons
avec une vitesse négligeable. Ces particules sont soumises, dans un vide poussé, à un champ accélérateur
entre la cathode portée au potentiel −Va avec V a > 0 et une anode trouée portée au potentiel 0.
1. Établir, dans le cadre newtonien, l’expression de la vitesse des électrons, en fonction de V a ,
lorsqu’ils passent au centre de l’anode.
2. Calculer la valeur théorique de la vitesse pour V a = 80 kV et pour Va = 120 kV. Comparer
cette vitesse à celle de la lumière dans le vide. Conclure.
P8– 4. Filtre de Wien
Une particule A de charge positive se trouve initialement à l’origine d’un référentiel Oxyz. Elle
est soumise à l’action d’un champ électrique E et d’un champ magnétique B uniformes, stationnaires,
et perpendiculaires entre eux. On choisit Ox parallèle à B et de même sens, et Oz parallèle à E et de
même sens.
1. La vitesse initiale de A est nulle. Trouver x, y et z en fonction du temps.
2. La particule est lancée avec une vitesse initiale v 0 perpendiculaire à E et B, dans le sens des
y positifs. Pour quelle valeur particulière vc de v0 , la particule décrit-elle une trajectoire rectiligne
confondue avec Oy ? Expliquer comment ce dispositif peut servir de filtre d’énergie ?
P8– 5. Précession de Larmor
Une particule A (masse m, charge électrique q) est soumise à l’action d’un champ magnétique B
uniforme et stationnaire dirigé suivant l’axe Oz du référentiel du laboratoire. À l’instant choisi comme
origine, la particule est en O. On se propose d’étudier le mouvement de A dans le référentiel R
tournant autour de B de telle sorte que la projection P de A dans le plan Oxy soit fixe dans R
(Fig. 8.18).
z
H
A
B
x
O
ϕ
R
y
ρ
P
R
F IG . 8.18.
1. Écrire dans R la loi fondamentale de la dynamique appliquée à A.
2. En déduire trois équations scalaires en projetant la relation précédente dans la base de R .
3. Montrer que la coordonnée radiale r oscille avec une pulsation v L que l’on exprimera en
fonction de la pulsation cyclotron vc = qB/m.
137
Particule chargée dans un champ électromagnétique stationnaire
P8– 6. Trajectoires trochoïdales d’électrons
Un électron A (masse me , charge électrique −e) est soumis à l’action d’un champ électrique et
d’un champ magnétique orthogonaux :
E = E ex
avec
E = 10 3 V . m−1 et B = B e y
avec
B = 20 mT
Sa vitesse initiale v0 est perpendiculaire à ces deux champs.
1. Calculer les grandeurs suivantes, en précisant leurs unités SI, a 1 = −eE/me , vc = −eB/me
et E/B.
2. On introduit la variable temporelle t = |v c|t. Quelles sont les équations paramétriques du
mouvement, z(t) et x(t), lorsque v0 = 4 × 104 m . s−1 ? Représenter la trajectoire de l’électron.
c Dunod – Toute reproduction non autorisée est un délit
3. Même question pour v 0 = 8 × 104 m . s −1 et pour v0 = 12 × 10 4 m . s −1.
9
Mouvement d’un corpuscule guidé
Le mouvement d’un solide, en contact avec un autre solide, peut souvent être étudié, en première
analyse, en considérant que ce solide se réduit à un corpuscule astreint à se déplacer sur une courbe ou
sur une surface. Ainsi, le mouvement d’un chariot sur un rail est celui de son centre de masse (cf. chapitre 13) sur une courbe parallèle au rail (Fig. 9.1a). De même, le mouvement d’une sphère, en contact
avec un plan horizontal, est d’abord celui de son centre de masse (cf. chapitre 13) se déplaçant dans un
plan parallèle (Fig. 9.1b).
Nous nous proposons d’étudier en détail de tels mouvements dont le nombre de degrés de liberté
est inférieur à trois en raison des liaisons, mais dont l’analyse est rendue délicate par la méconnaissance
partielle des actions de contact.
C
C
a)
b)
F IG . 9.1.
I . — CORPUSCULE GUIDÉ SUR UNE COURBE
Considérons un corpuscule A, de masse m, évoluant sur une courbe quelconque indéformable C
(Fig. 9.2). Il est soumis à la réaction R de contact qu’exerce sur lui le guide qui l’astreint à décrire
cette courbe et à une force donnée F, par exemple son poids mg. La trajectoire C étant connue, il est
naturel et commode d’adopter le système de coordonnées intrinsèques, ou de Frenet, formé localement
par les vecteurs unitaires et , tangent à C , e n porté par la normale principale orientée vers le centre de
courbure et eb défini par e b = et × en (cf. chapitre 2).
R
C
en
A
eb
F IG . 9.2.
et
139
Mouvement d’un corpuscule guidé
I . 1 . — Étude générale du mouvement
La loi fondamentale de la dynamique appliquée à A, par rapport à un référentiel terrestre R dans
lequel C est fixe, s’écrit en supposant R galiléen (cf. chapitre 7) :
m a = F + R avec
R = R t + Rn + R b
R t , R n et Rb étant respectivement les contributions tangentielle, normale et binormale de la réaction.
En projetant, dans la base de Frenet, on obtient :
v2
dv
0 = Fb + R b
m
= Ft + Rt
m = F n + Rn
dt
r
où Ft , Fn et Fb sont les composantes de F et Rt , Rn et Rb celles de R ; r désigne le rayon de
courbure et v la mesure algébrique de la vitesse suivant et .
Les composantes R t , Rn et R b sont des inconnues supplémentaires, ce qui, avec le paramètre
fixant la position du point sur la courbe, porte à quatre le nombre total d’inconnues, alors que la loi
fondamentale projetée ne fournit que trois équations. Il est donc nécessaire de préciser les conditions du
contact ; c’est ce que permettent les lois expérimentales du frottement solide, établies par C. Coulomb
(cf. chapitre 19). À ce stade, nous nous limitons aux résultats expérimentaux simples suivants :
(1) Si v = 0, Rt a même direction que v mais un sens opposé ; en outre : R t = m(R 2n+R2b )1/2 .
m étant un nombre sans dimension, appelé facteur de frottement ou adhérence, qui dépend de la nature
des corps en contact.
(2) Si v = 0, R t ms(R 2n + R2b)1/2 , m s étant le facteur de frottement statique. L’expérience
montre que ms est le plus souvent légèrement plus grand que m. On assimile parfois m s à m.
Si le mouvement a lieu sans frottement, R t = 0. La première équation permet alors de trouver le
mouvement ; avec les deux autres, on détermine R.
Remarques : (1) Si le référentiel dans lequel la courbe C est fixe n’est pas galiléen, il faut ajouter aux
forces précédentes les forces d’inertie d’entraînement et de Coriolis (cf. chapitre 7).
(2) Si la courbe C est plane et si F est dans ce plan, la réaction y est aussi puisqu’alors
F b = 0 et donc R b = 0.
(3) Si R t = 0 et si F dérive d’une énergie potentielle, l’utilisation de la conservation de
l’énergie facilite grandement la discussion du mouvement.
c Dunod – Toute reproduction non autorisée est un délit
I . 2 . — Mouvement d’une masselotte guidée sur une tige mobile
Une masselotte glisse sans frottement sur une tige qui est astreinte à tourner uniformément, autour
d’un axe vertical, en faisant un angle constant u0 avec cet axe. La masselotte est soumise aussi à
l’action d’un ressort de raideur K (Fig. 9.3). Étudions le mouvement de A par rapport au référentiel
non galiléen R, lié à la tige et tournant avec la vitesse angulaire V = V e z .
H
z
r
µ0
A
g
Ω
y
O
x
R
'
P
x
µ0
µ
F IG . 9.3.
R
y
140
9. Mouvement d’un corpuscule guidé
Aux forces mg, T = −K (r − l 0) e r et R, il faut ajouter, puisque R n’est pas galiléen, la force
d’inertie centrifuge et la force d’inertie de Coriolis, soit respectivement : mV2HA et −2mV × v . Dans
le référentiel R , l’énergie mécanique de A se conserve car la réaction R qu’exerce la tige sur A ne
travaille pas :
1
Ek + Ep = Cte avec Ek = mṙ2 et Ep = E pp + Epe + Epc
2
En effet, l’énergie potentielle est la somme de trois énergies potentielles : l’énergie potentielle de pesanteur Epp , l’énergie potentielle élastique Epe et l’énergie potentielle centrifuge Epc . À une constante
additive près sans intérêt, on a :
K (r − l0)2
mV 2 HA2
−mV 2r 2 sin2 u0
Epp = mgz = mgr cos u0
Epe =
Epc = −
=
2
2
2
On en déduit l’équation du mouvement :
1 2
K (r − l0 )2 mV 2r 2 sin2 u 0
= Cte
mṙ + mgr cos u0 +
−
2
2
2
En dérivant par rapport au temps et en simplifiant par ṙ, on trouve :
Em =
mr̈ + mg cos u0 + K (r − l0 ) − mV2 r sin2 u0 = 0
La position d’équilibre re sur la tige s’obtient aisément en faisant r̈ = 0 :
K (re − l0 ) − mV2r e sin2 u 0 = −mg cos u 0
d’où
re =
v20l 0 − g cos u0
v 20 − V2 sin 2 u 0
si on introduit le carré de la pulsation propre de l’oscillateur élastique v 20 = K /m. Il vient donc, en
posant r = r − re :
r̈ + (v20 − V2 sin 2 u0 )r = 0
La discussion ne présente aucune difficulté.
(1) Si V2 sin2 u0 < v20 , la masselotte oscille, avec la pulsation (v 20 − V 2 sin 2 u0 )1/2 , autour de sa
position d’équilibre.
(2) Si V 2 sin2 u0 v 20, l’amplitude du mouvement de la masselotte sur la tige amplifie jusqu’à
modifier le comportement du ressort et même provoquer sa rupture.
On peut obtenir l’équation différentielle du mouvement, d’une manière plus laborieuse, à partir de
la loi fondamentale de la dynamique, projetée dans la base e r, e u, e y . En effet :
donne :
m a A/R = m g + K (r − l 0) er + mV 2HA − 2m V × vA/R
m r̈ er = −mg e z + K (r − l 0) er + mV2 r sin u0 ey − 2mVṙ ez × e r
d’où, en explicitant :
mr̈ = −mg cos u0 − K (r − l0) + mV 2r sin 2 u0
0 = mg sin u0 + mV2r cos u 0 sin u0 + Rn
0 = −2mṙV sin u 0 + R b
Les deux dernières équations permettent de déterminer les composantes de la réaction en fonction de la
coordonnée r :
Rn = −m sin u0(g + V 2r cos u0 ) et Rb = 2mṙV sin u 0
Remarque : Notons que, dans le référentiel terrestre R, l’énergie de la masselotte ne se conserve pas
car le travail de la réaction R n’y est pas nul. Physiquement, cette non conservation est
due à l’énergie nécessaire pour astreindre la tige à un mouvement de rotation.
141
Mouvement d’un corpuscule guidé
II . — PENDULE CIRCULAIRE
Un pendule circulaire est le système simple constitué par une masselotte A qui se déplace sans
frottement sur un guide circulaire vertical (Fig. 9.4a). On peut réaliser aisément un tel pendule en accrochant la masselotte à l’extrémité d’un fil tendu de longueur l.
E p Énergies
H
g
mgl
O
µ
G
y
l
∆¼ ∆¼=2
R
B
∆µ1 0
Em
µ1
¼=2
¼ µ
Em
A
∆mgl
x
a)
b)
F IG . 9.4.
II . 1 . — Étude générale
c Dunod – Toute reproduction non autorisée est un délit
Les équations du mouvement issues de la projection dans la base de Frenet de la loi fondamentale
sont les suivantes :
v2
dv
m
= −mg sin u et m
= −mg cos u + Rn avec v = l u̇
l
dt
Il en résulte que :
g
ü + sin u = 0
l
La solution de cette équation différentielle du deuxième degré n’est simple que dans le cas des petits
angles. Aussi est-il préférable, puisque R ne travaille pas, d’exprimer la conservation de l’énergie
mécanique afin de faciliter l’analyse qualitative du mouvement.
La seule force qui travaille est le poids dont l’énergie potentielle s’écrit : E p = −mgx = −mgl cos u,
si l’axe des x est vertical descendant et l’origine des énergies potentielles prise en O. Quant à l’énergie cinétique par rapport à R, elle vaut Ek = mv2A/2 = ml2 u̇2/2. Il en résulte :
Em =
1 2 2
ml u̇ − mgl cos u = Cte
2
Suivant la nature de la liaison, l’analyse diffère comme nous allons le voir.
II . 2 . — La liaison est bilatérale
Si la liaison est bilatérale, la masselotte A reste en contact avec le guide, quelle que soit la valeur
de Rn .
Par exemple une perle enfilée sur un guide matériel filiforme est soumise à une liaison bilatérale ; cette dernière se traduit par l’équation de contrainte suivante sur les coordonnées de position :
x2 + y2 = l 2 = Cte
a) Discussion à l’aide du graphe de l’énergie potentielle
La discussion du mouvement est très simple à partir du graphe E p(u) (cf. chapitre 5) : les mouvements possibles sont ceux pour lesquels Em Ep (Fig. 9.4b).
142
9. Mouvement d’un corpuscule guidé
i) −mgl < E m < mgl. Le point oscille entre les valeurs symétriques −u 1 et u 1 définies par :
Em
cos u1 = −
mgl
avec Em = mv02/2 − mgl cos u 0 , v0 et u0 étant les valeurs initiales de la vitesse et de l’angle que fait
le fil avec la verticale descendante. Le mouvement est oscillatoire autour du point le plus bas B.
Dans le cas particulier où E m ≈ −mgl, u 1 p/2 : A oscille dans le voisinage de B où
l’énergie potentielle est minimale. En remplaçant sin u par u, on obtient l’équation caractéristique des
petits mouvements d’oscillation (cf. chapitre 10) :
g 1/2
ü + v20 u = 0 avec v0 =
l
Ordre de grandeur : Pour l = 50 cm, v 0 = 4, 43 rad . s−1 , d’où la période propre :
T 0 = 2p/v0 = 1, 42 s On vérifie expérimentalement ce résultat en mesurant la durée de dix oscillations de faible amplitude (u1 < 10◦ ).
Remarque : Lorsque l’approximation précédente n’est plus satisfaite, l’analyse qualitative s’impose
car l’équation différentielle n’est plus linéaire. L’effet de cette non-linéarité sera étudié
ultérieurement (cf. chapitre 10).
ii) E m mgl. La masselotte atteint le point le plus haut H. Son mouvement est révolutif et
périodique. Notons que, dans les deux cas, le mouvement réel diffère des prévisions précédentes en
raison des forces de frottement qui n’ont pas été prises en compte. Dans le premier, l’oscillation s’amortit
jusqu’à l’immobilité en B ; dans le second, le mouvement révolutif est freiné jusqu’à devenir oscillatoire
et s’arrêter en B.
b) Discussion dans l’espace des phases
La discussion précédente a montré une différence de nature entre deux types de mouvements :
l’un est oscillatoire, l’autre est révolutif. Ce changement qualitatif important apparaît nettement dans
l’espace des phases, ou espace des états en mécanique introduit par J. Maxwell en 1879. On définit un
tel espace en considérant, pour un système à un degré de liberté, le plan cartésien (u, L u ), Lu = ml2 u̇
étant le moment cinétique de A en O (Fig. 9.5).
Lθ
Em > mgl
Em = mg l
-π
O
π
θ
Em < mgl
F IG . 9.5.
Un point de cet espace représente l’état du système, puisque dans ce diagramme, u et u̇ à la
fois sont accessibles. La trajectoire du point représentatif du système est alors donnée par l’équation
exprimant Lu en fonction de u :
1
Lu = ml2 u̇ avec Em = ml 2 u̇2 − mgl cos u soit Lu = ±l [2m(E m + mgl cos u)]1/2
2
143
Mouvement d’un corpuscule guidé
Sur la figure on distingue aisément deux zones séparées par la courbe séparatrice correspondant à
E m = mgl :
i) l’une (en trait pointillé) pour laquelle le mouvement est oscillatoire (E m < mgl) ,
ii) l’autre (en trait plein) pour laquelle le mouvement est révolutif (E m > mgl) .
On voit que les conditions initiales permettent de déterminer sans ambiguïté le type de mouvement
du pendule dans l’espace des phases : mouvement oscillatoire ou mouvement révolutif.
c) Cas où le guide tourne uniformément autour de son diamètre vertical
Supposons que le guide soit astreint à tourner uniformément autour de son diamètre vertical BT, à
la vitesse angulaire V = −V ex (V > 0) (Fig. 9.6a). Il faut tenir compte en plus de l’énergie potentielle
centrifuge −mV 2HA 2/2, H étant la projection de A selon l’axe de rotation. L’énergie potentielle dans
le référentiel tournant R = Oxy z lié au guide est :
m
Ep = −mgl cos u − V 2l 2 sin 2 u
2
Dans R = Oxy z non galiléen, l’équation différentielle du mouvement est fournie par la conservation de l’énergie, laquelle est satisfaite car la puissance de la réaction y est nulle, et que la puissance de
la force de Coriolis est toujours nulle. Comme l’énergie cinétique par rapport à R vaut E k = ml2u˙2 /2 :
E k + Ep = Em = Cte
soit
1 2 2
m
ml u̇ − mgl cos u − V2l2 sin 2 u = Em
2
2
Ep
T
mgl
g
Epg
Ω
G
O
y
µ l
H
A
eu
−¼
−¼/2
E pc
¼
µ
-mgl
B
x
a)
c Dunod – Toute reproduction non autorisée est un délit
¼/2
O
b)
F IG . 9.6.
Sur la figure 9.6b, on a représenté le graphe E p (u) pour une vitesse angulaire V suffisamment
grande. On trouve une position d’équilibre stable pour une valeur de u comprise entre 0 et p/2, ce
qui était qualitativement prévisible. En effet, pour V = 0, on doit restituer l’analyse précédente dans
laquelle seule la pesanteur intervenait. En revanche, pour V très grand, la pesanteur est négligeable
devant la force centrifuge qui maintient la masselotte à la distance maximale l de l’axe de rotation.
Le calcul des positions d’équilibre par dérivation de E p par rapport à u permet de préciser ces
prévisions :
d Ep
= ml sin u(g − V2l cos u) = 0
du
pour
u = 0 et u e = ± arccos
g
V 2l
Si ces positions correspondent à des minima, c’est-à-dire si (d2 Ep / d u2 ) e > 0, les équilibres sont
stables. Comme :
d2 Ep
= ml sin u(V 2l sin u) + (g − V2 l cos u)ml cos u
d u2
144
9. Mouvement d’un corpuscule guidé
on trouve :
d2 Ep
d u2
0
= (g − V 2l)ml > 0
si
V<
g
l
1/2
La position d’équilibre ue = 0 est donc stable pour V < v0 . En revanche, si V > v0 ,
d2 Ep
d u2
= ml2V 2 sin 2 ue > 0
ue
d’où la stabilité de cette position. Dans le cas où l = 50 cm, la valeur critique V c de la vitesse angulaire
V vaut :
V c = v 0 = 4, 43 rad . s −1 soit Vc = 42, 3 tr . min−1
Ce changement qualitatif de position d’équilibre, sous l’action du paramètre V , est une bifurcation.
Remarque : Les deux positions d’équilibre u e = 0 pour V < v 0 et ue = ± arccos(v20 /V2) diffèrent fondamentalement ; la première respecte la symétrie du système par rapport à l’axe
vertical, la seconde non. On dit qu’il y a brisure de symétrie.
II . 3 . — La liaison est unilatérale
Revenons à l’étude initiale du pendule circulaire, en considérant le cas où la liaison est unilatérale ;
la contrainte sur les coordonnées de position se traduit alors par une inégalité. Concrètement, c’est ce
qui se passe lorsque, pour une raison quelconque, le fil n’est plus tendu (Fig. 9.7a). On a alors :
x 2 + y 2 l2
C’est aussi le cas d’une bille qui évolue dans une gouttière à section semi-circulaire.
3 mg l /2
mgl
Ep
H
g
O
l
θ
B
∆θ 2
∆θ1 O
∆π ∆π/2
y
R
θ1
θ2
π/ 2 π
θ
Em
A
∆mg l
x
a)
3 E p/2
b)
F IG . 9.7.
L’analyse est plus délicate que précédemment car, à l’équation fournie par la conservation de l’énergie, on doit ajouter la condition pour que le fil exerce une tension non nulle. On doit donc prendre en
compte l’inégalité suivante sur la réaction normale : Rn > 0. Il importe donc d’exprimer R n en fonction de l’angle u :
Rn = mlu̇ 2 + mg cos u =
2Em
+ 3mg cos u
l
d’où
2Em
+ 3mg cos u > 0
l
Afin de faciliter la discussion qualitative du mouvement, il est commode de traduire cette inégalité
145
Mouvement d’un corpuscule guidé
en termes d’énergie et d’utiliser un même graphe. La condition précédente s’écrit aussi :
3
3
E m > − mgl cos u soit Em > E p puisque E p = −mgl cos u
2
2
Ainsi, si la liaison est unilatérale, la masselotte quitte le guide circulaire pour une valeur u2 de u telle
que :
3
3
E m = Ep (u2 ) = − mgl cos u2
2
2
Sur le graphe de la figure 9.7b, on a représenté la courbe E p(u) et la courbe 3Ep(u)/2. Trois possibilités
doivent être envisagées :
i) −mgl E m 0
La valeur de u 2 n’est jamais atteinte puisque u 1 < u2 ; la masselotte demeure sur son guide en
oscillant autour de sa position la plus basse. Les petits mouvements sont identiques à ceux qui existent
lorsque la liaison est bilatérale.
ii) 0 < E m < 3mgl/2
La réaction s’annule pour la valeur u 2 < u 1. Le mouvement comporte une seconde phase au cours
de laquelle le point évolue sous la seule action de son poids. La trajectoire correspondante est la parabole
osculatrice au guide circulaire.
iii) E m 3mgl/2
Le mouvement est révolutif avec contact permanent de A sur le guide.
III . — CORPUSCULE GUIDÉ SUR UNE SURFACE
La position d’un corpuscule A sur une surface S indéformable quelconque ne dépend que de
deux paramètres. Ce corps, de masse m, est soumis à la réaction R qu’exerce le système qui maintient
A sur S et à une force donnée F, par exemple son poids m g (Fig. 9.8).
III . 1 . — Étude générale du mouvement
c Dunod – Toute reproduction non autorisée est un délit
Si la surface S est fixe dans un référentiel galiléen R, la loi fondamentale de la dynamique
s’écrit :
m a = F + R où R = Rt + Rn
R t et R n étant les contributions tangentielle et normale, dirigées respectivement suivant la tangente à
la trajectoire et suivant la normale à la surface S. Dans ce cas, les lois de Coulomb sont les suivantes :
i) Si v = 0, R t a même direction que v mais un sens opposé ; en outre,
Rt = mR n,
m étant le facteur de frottement.
ii) Si v = 0, R t ms Rn , ms étant le facteur de frottement statique.
Dans ce type de problème, où l’on a des informations sur la trajectoire, il est naturel d’expliciter
l’équation vectorielle du mouvement dans la base locale de Frenet.
En l’absence de frottement (R t = 0), l’équation du mouvement se réduit à :
m a = F + Rn
La projection de cette équation sur la normale à S donne l’expression de R n ; les deux autres équations
fournissent alors les équations différentielles du mouvement.
En outre, comme c’est souvent le cas, si la force donnée F dérive d’une énergie potentielle, on a
intérêt à substituer l’équation de conservation de l’énergie à l’une des équations précédentes.
146
9. Mouvement d’un corpuscule guidé
Remarque : Il n’est pas inutile de rappeler comment l’on obtient le vecteur en normal à une surface
d’équation f (x, y, z) = 0. Le vecteur grad f , de composantes ∂f /∂x, ∂f /∂ y, ∂f /∂ z,
est normal à cette surface, car :
d f = 0 et
df =
∂f
∂f
∂f
d z = grad f · d r
dx +
dy +
∂x
∂y
∂z
grad f · d r = 0
donnent
On en déduit en en divisant ces composantes par la norme de grad f . Par exemple, si la
surface est un paraboloïde de révolution d’équation : x 2 + y 2 − lz = 0, il vient :
∂f
= 2x
∂x
∂f
= 2y
∂y
∂f
= −l
∂z
On en déduit les composantes de e n :
2x
2y
2
2
2
1
/
2
2
[4(x + y ) + l ]
[4(x + y 2 ) + l2]1/2
[4(x2
−l
+ y 2) + l 2]1/2
z
z
R
Rn
A
Rt
R
O
H
S
A
Trajectoire
g
O
θ
R
g
mg
y
ϕ
y
P
x
x
F IG . 9.8.
F IG . 9.9.
III . 2 . — Pendule sphérique
Le pendule sphérique est constitué d’une masselotte qui évolue sans frottement sur une surface
sphérique (Fig. 9.9). On peux le réaliser en accrochant la masselotte à l’extrémité d’un fil inextensible,
auquel cas la liaison est unilatérale. Pour simplifier, nous limitons notre étude à la liaison bilatérale.
a) Équations du mouvement
Le mouvement ayant deux degrés de liberté, u et w, les deux équations du mouvement peuvent
être obtenues à partir de la conservation de l’énergie et de celle de la projection du moment cinétique,
en O, suivant la verticale ascendante Oz. En effet, comme le poids dérive de l’énergie potentielle
E p = mgz = mgl cos u et que la réaction R ne travaille pas, on a :
Em = Ek + Ep = Cte
soit
1
m(l 2u̇ 2 + l 2 ẇ2 sin 2 u) + mgl cos u = E m
2
En outre, le théorème du moment cinétique, appliqué en O, fournit l’équation suivante, le moment
en O de R étant nul :
d LO
= OA × mg
dt
avec :
L O = OA × mvA = le r × m(lu̇ eu + lw˙ sin u e w ) = ml2 (u̇ ew − ẇ sin u eu)
147
Mouvement d’un corpuscule guidé
En projetant sur l’axe vertical l’équation vectorielle fournie par ce théorème, on trouve, puisque le
moment du poids est un vecteur horizontal :
d LO
d(LO · e z)
d Lz
=
=
= 0 d’où Lz = Cte
dt
dt
dt
Or L z = LO · e z = ml2 ( u̇ ew − ẇ sin u e u) · ez = ml2(−w˙ sin u)(eu · ez ). Par conséquent :
ez ·
Lz = ml2 (−w˙ sin u) cos(u +
p
)
2
Lz = ml 2 ẇ sin2 u = Cte
soit
b) Nature du mouvement
Si on élimine ẇ entre les deux équations, on se ramène à un problème unidimensionnel ; l’équation
de conservation de l’énergie peut alors se mettre sous la forme :
1 2 2
ml u̇ + E p,ef = Em
2
où l’énergie potentielle E p,ef est l’énergie potentielle effective de ce problème à une dimension :
L 2z
ml 2 2 2
ẇ sin u = mgl cos u +
2
2ml2 sin 2 u
Les seuls mouvements possibles sont ceux pour lesquels E m Ep,ef . Traçons donc le graphe Ep,ef (u)
(Fig. 9.10a) : Ep,ef prend des valeurs infinies, pour u = 0 et u = p, et passe par une valeur minimale E0 . Comme :
d Ep,ef
L2 cos u
= −mgl sin u − z2
du
ml sin 3 u
les variations de Ep,ef (u) sont celles qui sont données dans le tableau 9.1 ; le minimum se produit donc
pour p/2 < u < p. Pour une valeur suffisante de l’énergie (Em > E0 ), les mouvements possibles sont
ceux pour lesquels u est compris entre deux valeurs extrêmes u1 et u 2 : u oscille donc entre deux
parallèles (Fig. 9.10b).
Ep,ef = mgl cos u +
0
u
d Ep,ef
du
−∞
Ep
∞
p/2
−
−mgl
L2
2ml2
u0
−
p
0
+
E0
∞
∞
c Dunod – Toute reproduction non autorisée est un délit
TAB . 9.1.
Remarque : La fonction Ep,ef (u) a une allure dissymétrique ; notons que la demi-somme des deux
valeurs extrêmes est supérieure à p/2.
E p,ef
z
L2z
2ml2 sin 2 θ
Em
E0
O
O
θ
y
ϕ
A
θ1 π /2 θ0 θ2
mgl cos θ
a)
π
θ
x
b)
F IG . 9.10.
148
9. Mouvement d’un corpuscule guidé
c) Mouvements stationnaires
Le mouvement en u est stationnaire (u = u 0 = 0) si les valeurs initiales satisfont, à la fois, aux
deux conditions suivantes :
d Ep,ef
L2z cos u 0
et
= 0 d’où
= −g
( u̇) 0 = 0 d’où Ep,ef 0 = Em
du 0
m 2l 3 sin 4 u0
Un tel mouvement est uniforme, puisque ẇ = Lz/(ml 2 sin 2 u0) = Cte, et n’est possible que sur un plan
parallèle situé en dessous du plan horizontal car u0 > p/2 (Fig. 9.10b).
Remarque : Pour Lz = 0, le mouvement en w est stationnaire puisque w˙ = 0. Le pendule décrit
alors un méridien et se comporte comme un pendule circulaire.
d) Calcul de la réaction
On obtient l’expression de la réaction R en appliquant la loi fondamentale de la dynamique à la
masselotte :
ma = R+ mg
Comme la composante radiale de l’accélération est −lẇ 2sin 2 u − lu̇2 (cf. chapitre 3), il vient :
−ml(ẇ2 sin2 u + u̇ 2) = −R − mg cos u
d’où
R = −mg cos u + ml(ẇ 2 sin2 u + u̇2 )
Par conséquent, pour u > p/2, R > 0 : la réaction est dirigée vers l’intérieur de la sphère lorsque A
évolue au-dessous du plan horizontal passant par O (Fig. 9.10b).
CONCLUSION
Retenons que l’étude du mouvement d’un corpuscule guidé est nettement moins simple que celle
d’un corpuscule soumis uniquement à des forces fondamentales telles que le poids, car les forces de
contact ne sont que partiellement connues.
(1) Il importe de prendre en compte les lois de Coulomb, notamment la relation supplémentaire
entre les composantes tangentielle et normale de la réaction, lorsqu’il y a glissement sur une surface :
Rt = mR n , m étant le facteur de frottement. En l’absence de glissement, cette équation est remplacée par l’inégalité, Rt ms Rn , ms étant le facteur de frottement statique.
(2) En l’absence de frottement, la réaction est normale à la trajectoire. Le mouvement est alors
facilement étudié à l’aide de la conservation de l’énergie ; laquelle fournit une intégrale première qui se
prête bien à une discussion qualitative du mouvement.
(3) Lorsqu’une seconde équation du mouvement est nécessaire, comme dans le cas du pendule
sphérique, qui a deux degrés de liberté, il est naturel d’appliquer en outre le théorème du moment
cinétique au point O par lequel passe la réaction inconnue afin d’éliminer cette dernière.
(4) Deux types de liaison du point matériel avec le guide doivent être considérés :
i) la liaison bilatérale ; le contact est permanent, ce qui se traduit par une équation de contrainte sur
les coordonnées,
ii) la liaison unilatérale ; le contact peut cesser, ce qui rend l’analyse plus complexe puisqu’une
inéquation sur la réaction normale doit être prise en compte. Il peut être commode d’exprimer cette
inégalité sous une forme faisant apparaître l’énergie potentielle : la discussion qualitative peut alors être
grandement facilitée.
Si le référentiel R n’est pas galiléen, l’analyse énergétique doit prendre en compte l’influence de
la force d’inertie d’entraînement, le travail de la force d’inertie de Coriolis étant, lui, toujours nul.
149
Mouvement d’un corpuscule guidé
EXERCICES ET PROBLÈMES
P9– 1. Mouvement d’une masselotte guidée par une courbe circulaire
Une masselotte A, de masse m, se déplace sur un rail situé dans un plan vertical. Le rail comporte
une partie circulaire, de diamètre BC = 2l, que le mobile parcourt à l’intérieur du cercle (Fig. 9.11). La
masselotte est abandonnée (sans vitesse initiale) en H à la hauteur h au-dessus de B, point le plus bas
du cercle. On prend comme origine de l’énergie potentielle de pesanteur Ep sa valeur en B. La liaison
est unilatérale et on néglige tous les frottements.
1. Exprimer, à tout instant, la vitesse v de A en fonction de l’angle u = (OB, OA).
2. Donner l’expression de la réaction R exercée par le guide circulaire en fonction de u.
3. Discuter les différents mouvements possibles suivant la valeur de h. On utilisera le graphe
E p(u).
4. Si h = 3l, l = 10 m et m = 350 kg, calculer les vitesses de passage en B et T, point le plus
haut du cercle, ainsi que les réactions du rail lors des passages en ces points.
z
g
H
y
g
H
A
T
h
O
µ
x
O
A
x
B
F IG . 9.11.
B
y
µ
F IG . 9.12.
P9– 2. Mouvement d’un corpuscule sur une courbe hélicoïdale
c Dunod – Toute reproduction non autorisée est un délit
On considère un cylindre circulaire, droit, de rayon R et de hauteur 2pR, auquel est lié un repère
orthonormé direct Oxyz : Oz est l’axe vertical du cylindre et Oxy est la base inférieure horizontale
(Fig. 9.12). La face latérale porte un tube mince de forme hélicoïdale HB dans lequel se déplace un
corpuscule A , de masse m. La définition paramétrique de la trajectoire de A est :
x = R cos u
y = R sin u
z = R(2p − u)
avec
0 u 2p
Le point H correspond à u = 0 et le point B à u = 2p.
1. Le cylindre est maintenu fixe et A glisse sans frottement sous l’action de son poids m g. Il est
abandonné sans vitesse initiale en H.
a) Déterminer la loi horaire du mouvement, c’est-à-dire l’abscisse curviligne s(t) de A sur sa
trajectoire en fonction du temps t.
b) Calculer la durée mise par A pour atteindre le point B, ainsi que la vitesse en ce point.
2. On suppose que le glissement de A se fait avec frottement, conformément aux lois de Coulomb,
le facteur de frottement étant constant et égal à m.
a) Calculer, en fonction de u(t) et de ses dérivées , l’accélération de A. En donner les projections
dans la base de Frenet.
b) Exprimer, dans cette base, les projections de la force de pesanteur et celles de la réaction d’appui.
c) Écrire les équations du mouvement et déduire de la loi de Coulomb l’équation différentielle
relative à s(t).
d) Montrer que u croît et tend vers une limite. Quelle est la vitesse limite de A ?
150
9. Mouvement d’un corpuscule guidé
P9– 3. Écart maximal d’un pendule sphérique avec la verticale
Une bille A, de masse m, est suspendue à l’extrémité d’un fil inextensible, de longueur l, attaché
à l’origine O d’un référentiel terrestre R = Oxyz. On l’écarte de l’axe vertical descendant Oz d’un
angle u0 dans le plan Ozx et on lui communique une vitesse v0 dirigée suivant l’axe Oy. À tout instant, on caractérise la position de A sur la sphère, de centre O et de rayon l, par l’angle u = (Oz, OA)
et w = (Ox, OH), angle que fait avec Ox la projection H de A dans le plan horizontal (Fig. 9.13).
1. Montrer que l’énergie mécanique de la bille se conserve.
2. a) Établir que la composante L z du moment cinétique en O suivant l’axe z se conserve.
b) Exprimer, dans la base sphérique (e r , eu, e w), le vecteur OA, ainsi que la vitesse de A par
rapport à R.
c) Montrer que, dans cette base, la vitesse se réduit à une seule composante, à l’instant initial
(u = u0) et à l’instant où u est maximal (u = u m ).
d) Traduire la conservation de L z entre l’état initial, caractérisé par u0 et v0 , et l’état final caractérisé par um et vm .
3. Pour quelle vitesse v, en fonction de u 0 , la valeur de u m est-elle égale à p/2 ?
g
O
ϕ
H
y
g
A
F IG . 9.13.
z0
x
x0
θ
z
Ω
y
O
S
x
y0
A
F IG . 9.14.
P9– 4. Masselotte en contact sans frottement avec une demi-sphère en rotation uniforme
Une masselotte A, de masse m, se déplace, sans frottement, sur la surface intérieure d’une demisphère creuse S. Cette surface est astreinte à tourner uniformément, à la vitesse angulaire V, autour de son axe de révolution vertical. Sur la figure 9.14, on a représenté le référentiel terrestre, noté
R 0 = Ox0y0z 0 , Oz0 étant la verticale ascendante, et R = Oxyz0 un référentiel invariablement lié
à S.
On se propose d’étudier le mouvement de A par rapport à R. Pour cela, on utilise la base de R
et on introduit v0 = (g/r0) 1/2, g étant l’intensité du champ de pesanteur terrestre et r 0 le rayon de la
demi-sphère S.
1. Exprimer, en fonction des coordonnées x, y, z de A dans R, de leurs dérivées par rapport
au temps x,˙ ẏ, ż et de V, la vitesse d’entraînement de A, son accélération d’entraînement et son
accélération de Coriolis.
2. Écrire vectoriellement la loi fondamentale de la mécanique pour A dans son mouvement par
rapport à R. En déduire les équations différentielles auxquelles satisfont x, y et z ; on mettra la
réaction R qu’exerce S sur A sous la forme suivante que l’on justifiera : R = −R r/r 0 où r = OA.
3. a) Quelle est, en fonction de z, l’énergie potentielle de pesanteur de A ? On prendra l’origine
de l’énergie potentielle à z = 0.
b) Montrer que la force d’inertie d’entraînement dérive aussi de l’énergie potentielle mV 2z 2/2,
lorsque l’on prend l’origine à z = 0.
c) En déduire l’énergie potentielle totale E p de A.
151
Mouvement d’un corpuscule guidé
4. a) Tracer le graphe de la fonction f (u) = u 2 + 2v 20u/V 2 pour v20 /V2 = 0, 4. Montrer que
E p = mV2r 20 f (z/r 0 )/2.
b) Discuter qualitativement la nature des différents mouvements en z , suivant la valeur de l’énergie
mécanique totale Em de A dans R (on prendra v 20 /V2 = 0, 4).
c) Pour quelle valeur Em de l’énergie, le point A évolue-t-il en contact avec S dans un plan
horizontal ? Quelle est la cote zm correspondante en fonction de r0 ?
5. Écrire l’équation vectorielle traduisant l’équilibre de A par rapport à R. Interpréter cette condition en introduisant le champ de pesanteur apparent ga = g + V2HA, H étant la projection de A sur
l’axe de rotation Oz0. En déduire la cote, à l’équilibre , en fonction de r 0. Comparer cette cote à z m et
conclure.
P9– 5. Mouvement sans frottement d’une masselotte sur une tige en mouvement
Une masselotte A (masse m) se déplace sans frottement le long d’une tige T qui est astreinte à
tourner uniformément autour de l’axe horizontal Oz dans le plan vertical Oxy du référentiel terrestre
R supposé galiléen (Fig. 9.15). La liaison de A le long de T est bilatérale. On désigne par V la
vitesse de rotation de la tige par rapport à R.
1. Appliquer la loi fondamentale de la dynamique par rapport à R. En déduire l’équation différentielle du mouvement à laquelle satisfait la coordonnée radiale r. Quelle est, en fonction de r ou de
ses dérivées par rapport au temps, l’expression de la réaction R qu’exerce la tige sur A.
2. Montrer que l’énergie mécanique E m de A par rapport à R ne se conserve pas.
3. L’énergie mécanique E m par rapport au référentiel tournant R lié à la tige se conserve, elle.
Pourquoi ? En déduire l’équation du mouvement en r.
y
A (m)
g
T
Ωt
Oz
c Dunod – Toute reproduction non autorisée est un délit
F IG . 9.15.
R
x
10
Oscillateurs harmoniques.
Oscillateurs amortis
L’expérience courante montre que tout système physique, en équilibre stable, soumis à une légère
perturbation revient généralement vers sa position d’équilibre après une suite d’oscillations dont l’amplitude finit par s’annuler. Ce comportement de tout système perturbé justifie l’importance de l’étude
des oscillateurs harmoniques et amortis.
I . — OSCILLATEURS HARMONIQUES
I . 1 . — Définition
On appelle oscillateur harmonique tout système dont le degré de liberté x(t) évolue suivant une
loi sinusoïdale :
x(t) = x m cos(v0 t + f) = x m cos(2pf0 t + f)
Dans ces expressions, xm , v0 , f0 = v0/(2p), T0 = 1/f0 et f sont des constantes appelées respectivement l’amplitude, la pulsation, la fréquence, la période et la phase à l’origine des temps (Fig. 10.1).
L’importance des oscillateurs harmoniques est liée à la possibilité de représenter un oscillateur quelconque par un groupe d’oscillateurs harmoniques de pulsations différentes (cf. annexe 2 dans Optique).
x
xm
f=0
T0
0
F IG . 10.1.
t
153
Oscillateurs harmoniques. Oscillateurs amortis
I . 2 . — Équations différentielles caractéristiques
L’application des lois de la physique à un oscillateur harmonique fournit généralement l’un des
deux types d’équations différentielles suivants :
ẍ + v20 x = 0
v 2x2
ẋ2
+ 0 = Cte
2
2
ou bien
On passe de la première équation à la seconde en multipliant les deux membres par ẋ et en intégrant ;
réciproquement, on passe de la seconde à la première en dérivant et en simplifiant par ẋ = 0. La
première de ces équations est clairement linéaire, puisque toute combinaison linéaire de solutions est
aussi une solution.
I . 3 . — Petites oscillations autour d’une position moyenne
Considérons un corpuscule A, de masse m, soumis à l’action d’une force qui dérive de l’énergie
potentielle E p(x), x étant l’abscisse donnant la position de A par rapport au repère unidimensionnel
R, d’origine O et de base ex . L’énergie mécanique E m de A est constante (cf. chapitre 5) :
1
Em = E k + Ep = m ẋ2 + E p(x) = Cte
2
Supposons, comme cela arrive très souvent, que l’énergie potentielle Ep (x) passe par un minimum de
valeur E0 pour x = x 0 (Fig. 10.2). Il est alors naturel d’exprimer E p(x) à l’aide d’un développement
de Taylor autour de la valeur minimale E0 ; on obtient :
1
x − x0
Em = m ẋ 2 + E0 +
2
1!
d Ep
dx
0
(x − x0) 2
+
2!
d2 E p
d x2
0
+ ···
c Dunod – Toute reproduction non autorisée est un délit
Comme (d Ep / d x)0 = 0, le premier terme non nul est le terme quadratique ; ce dernier est positif
puisque Ep passe par un minimum. Dans ces conditions, après perturbation du système, les seuls mouvements possibles sont ceux pour lesquels x1 x x 2 : x oscille entre x1 et x2 , ce qui traduit
la stabilité de l’équilibre. Cette stabilité doit donc être associée au minimum de l’énergie potentielle à
l’équilibre.
Ep
F ( x)
E
E0
0
0
x1 x0
x2
x0
x
F IG . 10.2.
x
F IG . 10.3.
Si la perturbation apportée au système est suffisamment faible, on peut négliger les termes d’ordre
supérieur à deux dans le développement précédent :
1
Ep ≈ E 0 + K (x − x 0)2
2
avec
K=
d 2 Ep
dx2
>0
0
154
10. Oscillateurs harmoniques. Oscillateurs amortis
Donc :
1 2
1
m ẋ + K (x − x0 )2 = Em − E 0
2
2
ce qui donne, en dérivant et en rejetant la solution parasite ẋ = 0 :
ẍ + v 20(x − x0 ) = 0
en posant
v 20 =
K
m
Désignant par X = x − x0, la position comptée à partir de la position d’équilibre, on obtient l’équation
différentielle du deuxième ordre linéaire caractéristique de l’oscillateur harmonique :
Ẍ + v20 X = 0
dont la solution est
X = X m cos(v0t + f)
où Xm et f, amplitude et phase à l’origine, sont déterminées par les conditions initiales. Notons que
la pulsation propre v0 et donc la période T 0 = 2p/v 0 dépendent des caractéristiques propres de
l’oscillateur (K , m) et non de la perturbation extérieure.
La force qui s’exerce sur l’oscillateur se déduit aisément de l’approximation quadratique de l’éner(2)
gie potentielle. En effet, comme E p = E0 + K (x − x0) 2/2 il vient :
F=−
d Ep
ex = −K (x − x0 ) ex
dx
Cette force est donc proportionnelle à l’écart du paramètre x par rapport à la position d’équilibre x0
(Fig. 10.3). En raison du signe moins, elle est positive si x < x 0 et négative si x > x0 . Aussi dit-on que
c’est une force de rappel.
Remarque : Le simple résultat v0 = (K /m) 1/2 confirme le fait bien connu que les objets lourds
vibrent en général avec une fréquence f 0 = v0 /(2p) plus faible que les objets légers.
I . 4 . — Énergie mécanique d’un oscillateur harmonique
À une constante additive près, sans intérêt en mécanique newtonienne, l’énergie mécanique s’écrit :
Em =
mẋ 2
K (x − x0)2
mv20X 2m
KXm2
KX 2m
mv20X 2m
+
=
=
sin 2(v0 t + f) +
cos2 (v0 t + f) =
2
2
2
2
2
2
L’énergie d’un oscillateur harmonique est donc une constante qui est proportionnelle au carré v 20 de la
pulsation et au carré X2m de l’amplitude. Le graphe de la figure 10.4 montre bien qu’au cours du temps,
il y a transformation d’énergie cinétique en énergie potentielle et vice-versa.
Énergies
Em
Ep
0
T0
2T 0
F IG . 10.4.
Ek
t
155
Oscillateurs harmoniques. Oscillateurs amortis
I . 5 . — Exemples
a) Pendule élastique
i) Mouvement horizontal
Considérons une masselotte A, de masse m, soumise à la force horizontale de rappel exercée par
un ressort : −K (x − l0 ) ex , l0 étant sa longueur à vide (Fig. 10.5a).
O
g
l0
l1
K
X
X
O
K
A
A
x
x
a)
b)
F IG . 10.5.
Projetée suivant l’axe horizontal Ox, la loi fondamentale appliquée à A donne :
m ẍ = −K (x − l0 )
soit
Ẍ + v20 X = 0
en divisant par m, en posant v 20 = K /m et en changeant de variable : X = x − l 0 . Par conséquent :
X = X m cos(v 0t + f) et Ẋ = −Xm v0 sin(v0t + f)
Supposons qu’initialement on écarte A de sa position d’équilibre de la distance d m et qu’on l’abandonne. Il vient :
X(0) = dm = Xm cos f et Ẋ(0) = 0 = −X mv0 sin f
d’où f = 0, Xm = dm et X = dm cos(v0 t).
Remarque : Nous avons évité, ici aussi (cf. chapitre 4) d’écrire d’emblée la force élastique sous la
forme −m v20 (x − l0 )e x , car cette force n’est pas proportionnelle à la masse (v20 = K /m)
contrairement à ce qu’elle pourrait laisser penser à un lecteur débutant. Seule la force de
gravitation présente cette singularité majeure (cf. chapitre 7).
c Dunod – Toute reproduction non autorisée est un délit
ii) Mouvement vertical
Dans ce cas, l’équation différentielle suivant la verticale descendante s’écrit (Fig. 10.5b) :
m ẍ = −K(x − l0 ) + mg
En introduisant la nouvelle position d’équilibre le = l0 + mg/K et la variable X = x − le , on obtient
la même équation différentielle que précédemment : Ẍ + v20 X = 0.
Ainsi, le rôle du poids, et plus généralement de toute force constante, est uniquement de modifier
la position d’équilibre. On pourra, par conséquent, déterminer préalablement la position d’équilibre et
écrire la force exercée par le ressort sous la forme −KX, X étant l’allongement compté à partir de cette
position d’équilibre.
Ordre de grandeur : Calculons la raideur K d’un ressort qui forme, avec une masse m = 0, 1 kg,
un oscillateur harmonique de période T0 = 2p/v0 = 1 s : K = mv20 = 4p2 m/T02 ≈ 4 N . m−1 .
b) Pendule simple
Considérons un pendule simple constitué par une masselotte A, de masse m, astreinte par une
liaison bilatérale à se déplacer sans frottement sur un guide circulaire C fixe, de rayon l (cf. chapitre 9).
156
10. Oscillateurs harmoniques. Oscillateurs amortis
En appliquant le théorème de l’énergie mécanique, on obtient, avec les notations habituelles (Fig. 10.6) :
g
ü + sin u = 0
l
Si sin u ≈ u, l’oscillateur est harmonique puisque l’équation différentielle devient :
ü + v20 u = 0
v20 =
en posant
g
l
Ce résultat fournit une méthode pour mesurer g à partir de la période T 0 = 2p/v 0 :
g = lv20 = 4p2 l/T02. Notons que la longueur l d’un pendule simple qui bat la seconde, c’est-à-dire de
période T0 = 2 s , est :
g
gT 20
l= 2 =
≈1m
4p 2
v0
Oz
y
y
g
l
g
2r
C θ
θ
x
0
−πr
A(m)
F IG . 10.6.
θ/2
A
πr
x
F IG . 10.7.
c) Pendule cycloïdal
Ce pendule, appelé aussi pendule d’Huygens, est un pendule simple dont la trajectoire non circulaire est telle qu’il présente la propriété d’isochronisme des oscillations, quelle que soit la valeur de
l’amplitude, contrairement au pendule simple circulaire. Il est constitué par une masselotte A assujettie à glisser sans frottement sur une courbe cycloïdale, d’équations paramétriques (cf. chapitre 2) :
x = r(u + sin u)
et y = r(1 − cos u)
u étant le paramètre angulaire (−Cy, CA) représenté sur la figure 10.7. La tangente à la courbe fait
l’angle u/2 avec l’axe Ox ; en effet :
dx
= r(1 + cos u)
du
et
dy
= r sin u
du
dy
=
dx
d’où
dy
du
du
dx
=
sin u
1 + cos u
ce qui s’écrit aussi :
dy
2 cos(u/2) sin(u/2)
u
= tan
=
2
dx
2 cos (u/2)
2
L’axe Oy étant la verticale ascendante, l’équation du mouvement de A, de masse m, en projection
suivant la tangente à la trajectoire, orientée dans le sens des abscisses curvilignes croissantes s, s’écrit :
d2s
m 2 = −mg sin
dt
u
2
Exprimons s en fonction de u, sachant que s = 0 pour u = 0. Il vient :
s=
ds =
2
2 1/2
(d x + d y )
u
2
2
(1 + cos a) + sin a
=r
0
puisque 2(1 + cos a) = 4 cos2(a/2). Ainsi : s = 4r sin(u/2).
1/2
u
d a = 2r
cos
0
a
2
da
157
Oscillateurs harmoniques. Oscillateurs amortis
L’équation différentielle est donc :
s̈ + v20 s = 0
avec
g
4r
v0 =
1/2
Le pendule d’Huygens est donc un oscillateur harmonique, quelle que soit l’amplitude des oscillations ;
sa période s’écrit simplement en fonction du rayon de courbure R = 4r de la cycloïde en O :
T0 =
2p
4r
= 2p
v0
g
1/2
= 2p
R
g
1/2
On peut retrouver l’équation du mouvement à l’aide de l’énergie :
Em = Ek + Ep = Cte
et
avec
Ek =
1 2
mṡ2
=
mv
2 A
2
u
s2
Ks 2
mg
= 2mgr
avec K =
=
2
2
16r
2
4r
On obtient bien une énergie potentielle quadratique et l’équation caractéristique suivante :
E p = mgy A = mgr(1 − cos u) = 2mgr sin2
Em =
m ṡ2
Ks2
= Cte
+
2
2
d) Oscillateur harmonique bidimensionnel
On appelle ainsi un oscillateur à deux degrés de liberté, dont les deux équations du mouvement
sont celles d’oscillateurs harmoniques isochrones, c’est-à-dire de même fréquence.
Un corpuscule A, dont les positions suivant les axes Ox et Oy d’un référentiel R satisfont aux
équations différentielles :
ẍ + v20 x = 0
et
ÿ + v20 y = 0
est un oscillateur harmonique bidimensionnel. On en déduit :
x = A1 cos(v0 t + fx )
et y = A 2 cos(v0 t + fy )
ce qui s’écrit, en posant f = fx − f y :
c Dunod – Toute reproduction non autorisée est un délit
x = A1 cos(v0 t + f x )
et y = A2 cos(v 0t + fx − f) = A 2[cos(v 0t + f x ) cos f + sin(v0t + f x ) sin f]
En éliminant (v0 t + f x), on obtient l’équation cartésienne de la trajectoire :
y
x
x2
cos f + 1 − 2
=
A2
A1
A1
1/2
sin f
soit
2xy
x2
y2
cos f = sin 2 f
+
2
2 − A A
A1 A2
1 2
La projection de la trajectoire de A dans le plan Oxy est une ellipse (Fig. 10.8). Concrètement, un
tel mouvement est celui de la projection de l’extrémité d’un pendule simple qui n’est pas astreint à se
déplacer dans un plan vertical. C’est aussi le mouvement de la trace de l’impact électronique sur un écran
d’oscillographe cathodique, lorsque les tensions analysées suivant les axes de déviations horizontale et
verticale varient sinusoïdalement à la même fréquence : l’ellipse est une courbe de Lissajous . Enfin,
c’est le mouvement de l’extrémité du vecteur champ électrique d’une onde électromagnétique polarisée
elliptiquement (cf. Électromagnétisme et Optique).
Remarque : Lorsqu’il y a propagation d’onde (électromagnétisme ou optique), la phase telle que f x
ou fy est conventionnellement définie par l’argument vt − fx et non vt + f x.
158
10. Oscillateurs harmoniques. Oscillateurs amortis
y
A
0
x
F IG . 10.8.
II . — OSCILLATEURS AMORTIS PAR FROTTEMENT VISQUEUX
Au cours du mouvement de l’oscillateur, on observe généralement que l’amplitude des oscillations
n’est pas constante, mais décroît constamment. On rend compte de cette décroissance en introduisant
une force supplémentaire de frottement proportionnelle à la vitesse, −av (a > 0), appelée force de
frottement visqueux de Stokes (cf. chapitre 31). Sans restreindre sa généralité, nous allons rendre l’étude
concrète en considérant l’exemple du ressort élastique.
II . 1 . — Équation différentielle du mouvement
Désignons désormais par x la position de la masselotte, à partir de sa position d’équilibre. L’équation différentielle s’écrit :
a
K
m ẍ = −Kx − a ẋ soit ẍ + ẋ + x = 0
m
m
Le rapport a/m étant homogène à l’inverse d’une durée, posons a/m = 1/te . La signification de la
durée te apparaîtra clairement une fois l’équation différentielle résolue. On a donc l’équation canonique
suivante :
ẋ
K
m
+ v20 x = 0
avec
v20 =
et te =
ẍ +
te
a
m
Le terme d’amortissement étant proportionnel à ẋ, cette équation différentielle est linéaire : toute combinaison linéaire de solutions est aussi solution.
II . 2 . — Nature du mouvement
En cherchant des solutions de l’équation différentielle en exp(rt), on trouve l’équation caractéristique du deuxième degré :
r
r2+
+ v20 = 0
te
dont les solutions sont :
r1 = −
1
+ v0
2te
1
−1
4v20 t2e
1/2
et r 2 = −
1
− v0
2te
1
−1
4v20t 2e
1/2
La solution x(t) la plus générale se met donc sous la forme d’une combinaison linéaire des deux solutions exp(r1t) et exp(r2 t) (cf. annexe 3) :
x = C 1 exp(r 1t) + C2 exp(r2 t)
Suivant les valeurs du produit sans dimension :
Q = v0 te
appelé facteur de qualité, on distingue trois types de mouvement.
159
Oscillateurs harmoniques. Oscillateurs amortis
a) Oscillateur faiblement amorti (Q > 1/2)
Si Q > 1/2, ce qui est le cas le plus fréquent, on a, en introduisant j 2 = −1 :
r=−
1
± jva
2te
avec
va = v0
1−
1/2
1
4Q2
On en déduit :
x(t) = C exp −
t
2te
cos(va t + fa )
Sur la figure 10.9, on a représenté l’évolution de x. L’allure de la courbe est celle d’un mouvement
oscillatoire amorti, d’où le nom de pseudo-pulsation donné à va et de pseudo-période donnée à la
quantité :
Ta =
2p
1
= T0 1 −
4Q2
va
x
−1/2
Q >1/2
v0
t
exp −
2¿e
!a
0
2¼=!a
t
−
v0
t
exp −
2¿e
!a
c Dunod – Toute reproduction non autorisée est un délit
F IG . 10.9.
On détermine les constantes C et f a à l’aide des conditions initiales sur la position et sur la
vitesse. Supposons qu’à l’instant t = 0 on ait x = 0 et ẋ = v0 ; il vient :
1
x(0) = 0 = C cos f a et ẋ(0) = v0 = C −va sin f a −
cos fa
2te
car ẋ = C exp [−t/(2te)] [−v a sin(v at + fa ) − 1/(2t e ) cos(vat + f a)] . Il en résulte :
v0
t
exp −
sin(v at)
fa = p/2, C = −v 0 /v a d’où x(t) =
2te
va
La pseudo-sinusoïde est en contact avec les courbes (v0/va) exp[−t/(2t e)] et −(v 0/v a) exp[−t/(2te )]
aux instants tc définis par :
sin(v at)
t
v0
exp −
ẋ(t) =
−
+ va cos(va t) = 0
2t e
2t e
va
Par conséquent :
1
nTa
tan(va tc ) = 2vate d’où tc =
arctan(2v ate ) +
2
va
Ta = 2p/va étant la pseudo-période du mouvement et n un entier. Ainsi, te est la durée au bout de
laquelle l’amplitude est divisée par e1/2 ≈ 1, 5. Comme l’amplitude est nulle après quelques valeurs
de te, on dit que t e caractérise la durée de vie de ces oscillations amorties et on l’appelle la durée de
relaxation en énergie (Fig. 10.9).
160
10. Oscillateurs harmoniques. Oscillateurs amortis
Remarques : (1) On introduit souvent une durée de relaxation t a relative à l’amplitude qui vaut le
double de celle définie ici : t a = 2te . Le choix de te , qui revient à privilégier le concept
d’énergie d’un oscillateur par rapport à celui d’amplitude, est fortement suggéré par les
définitions adoptées en physique moderne.
(2) Le facteur de qualité d’un oscillateur harmonique est infini.
Dans le cas important où Q 1/2, on obtient les formules approchées suivantes :
va ≈ v0
1−
1
8Q2
Ta ≈ T0 1 +
1
8Q2
Ta
T
+n a
4
2
et t c ≈
i) Décrément logarithmique
On caractérise aussi la décroissance de l’amplitude d’un oscillateur amorti par le décrément logarithmique L :
1
x(t)
L = ln
n
x(t + nT a)
x(t) et x(t + nT a) étant les élongations à des instants séparés par un nombre entier de périodes. On a :
L=
1
C exp(−t/2te ) cos(va t + fa )
ln
n
C exp[−(t + nT a)/2t e] cos(v a t + fa )
d’où
L=
Ta
p
=
2te
vat e
Ainsi, L est le rapport de la durée de la pseudo-période du mouvement sur la durée de relaxation en
amplitude.
Exemple : La durée de relaxation t e d’un oscillateur mécanique, de pseudo-période T a = 1 s, dont
le mouvement a une amplitude qui est divisée par quatre au bout de dix oscillations, est obtenue selon :
te =
Ta
2L
avec
L=
1
ln 4 = 0, 14
10
d’où
t e ≈ 3, 6 s
ii) Facteur de qualité et perte d’énergie relative
On caractérise souvent l’amortissement d’un oscillateur par le facteur de qualité Q. Montrons que
Q est relié à la perte d’énergie relative d’un oscillateur très peu amorti. Il vient, si Q 1/2 et donc
va ≈ v 0 :
Em =
1 2 1 2
1
mẋ + Kx = m
2
2
2
v 20
v2a
exp −
t
te
va cos(v at) −
sin(vat)
2te
2
+ v20 sin 2(va t)
Or le terme entre accolades vaut pratiquement v2a . Par conséquent :
Em ≈
1
m
2
v 20
v2a
exp −
t
te
v2a = Em (0) exp −
t
te
On en déduit la perte d’énergie relative par unité de temps :
1 d Em
1
≈
te
Em d t
ce qui donne, pendant une durée égale à la pseudo-période T a :
−
2p
2p
−DEm
Ta
≈
≈
=
et
Em
te
vat e
Q
Q≈
Em
p
≈ 2p
L
−DE m
Ainsi, le facteur de qualité d’un oscillateur faiblement amorti par frottement visqueux est une mesure
de l’inverse de sa perte d’énergie relative pendant une durée égale à une pseudo-période.
161
Oscillateurs harmoniques. Oscillateurs amortis
Ordre de grandeur : Le facteur de qualité d’un oscillateur mécanique, dont le décrément logarithmique est L = 0, 14, vaut Q ≈ p/L = 22, 4. Dans le cas d’oscillateurs mécaniques tels que ceux que
l’on utilise en sismographie (cf. chapitre 11), le facteur de qualité dépasse facilement la valeur 1 000.
Certains oscillateurs mécaniques tels que les quartz ont des facteurs de qualité qui atteignent 10 6 .
b) Oscillateur très amorti (Q < 1/2)
Dans le cas où Q < 1/2, la solution de l’équation caractéristique du deuxième degré est :
r=−
1
±b
2te
avec
1
−1
4Q2
b = v0
1/2
L’élongation s’écrit donc :
x(t) = exp −
t
2te
[C 1 exp(bt) + C 2 exp(−bt)]
Avec les mêmes conditions initiales que précédemment, on trouve (Fig. 10.10) :
x(t) =
t
v0
exp −
2te
b
x
sinh(bt)
x
Q > 1/2
Q =1/2
Cas critique
0
0
t
t
F IG . 10.10.
F IG . 10.11.
c Dunod – Toute reproduction non autorisée est un délit
c) Amortissement critique (Q = 1/2)
Si Q = 1/2, l’équation caractéristique du deuxième degré admet une racine double
r = −1/(2te ). Par conséquent C 1 exp[−t/(2t e)] est une première solution de l’équation différentielle.
Or x(t) = C2 t exp[−t/(2t e )] est aussi une solution (cf. annexe 4) ; en effet, en injectant cette solution
dans l’équation différentielle canonique ẍ + ẋ/te + v 20x = 0 , on trouve bien, en utilisant v20 te = 1/2 :
C2 exp −
t
2te
−
1
t
+ 1−
2t e
2te
−
1
2te
+
1
t
+ v 20 t = 0
1−
2te
te
Il en résulte que x(t), qui est une combinaison linéaire des deux solutions, s’écrit :
x(t) = exp −
t
2te
(C 1 + C 2t)
Dans les mêmes conditions initiales que précédemment, on trouve (Fig. 10.11) :
x(t) = v0 t exp −
t
2te
Ce cas est qualifié de critique. Dans la pratique, on règle souvent l’amortissement près de sa valeur
critique ; on évite ainsi une trop longue attente de la position d’équilibre.
162
10. Oscillateurs harmoniques. Oscillateurs amortis
III . — ANALOGIE ÉLECTRIQUE
III . 1 . — Circuit RLC
Considérons un circuit électrique fermé constitué d’un condensateur de capacité C, d’une bobine
d’inductance L et d’une résistance R placés en série (Fig. 10.12a). Si le condensateur est initialement
chargé, on constate qu’il se décharge dans le reste du circuit, de façon oscillante : la charge q du
condensateur évolue suivant une loi sinusoïdale amortie. On met en évidence une telle évolution en
visualisant sur un oscilloscope la tension uC = q/C aux bornes du condensateur (cf. Électronique).
On rend possible cette visualisation en utilisant un générateur de signaux carrés qui reproduit, avec une
fréquence suffisante, l’excitation initiale du condensateur.
L
i
q
R
A
++ ++
q
C
R
L
i
+
−
A
++ ++
C
R
N
a)
Syst ème actif
R1
M
R1
b)
F IG . 10.12.
La loi des mailles, appliquée à un tel circuit, en régime quasi stationnaire, donne (cf. Électromagnétisme) :
di
q
= −L − Ri
dt
C
soit
L
di
dq
q
= 0 avec i =
+ Ri +
dt
dt
C
où q est la charge de l’armature A du condensateur vers laquelle est orienté le courant. Il en résulte
l’équation différentielle canonique :
q̈ +
q̇
+ v 20 q = 0
te
avec
v0 =
1
LC
1/2
et te =
L
R
Ce système électrique est donc dynamiquement équivalent à l’oscillateur amorti : la correspondance
entre les différentes grandeurs est donnée dans le tableau 10.1. Le rôle de la masse m est tenu par
l’inductance L, celui de la raideur K par l’inverse 1/C de la capacité, enfin celui de l’amortissement
a par la résistance R. Ce dernier résultat n’est guère surprenant lorsqu’on sait que tout résistor dissipe
de l’énergie électrique (cf. Électromagnétisme). L’expression du facteur de qualité de ce circuit s’en
déduit aisément :
Lv 0
Q = v 0 te =
R
Mécanique
x
v
a
m
K
Électricité
q
i
R
L
C −1
TAB . 10.1.
Ordre de grandeur : Dans un circuit électrique typique, où L = 0, 1 H, C = 10 mF, R = 14 V,
on trouve : v0 = 103 rad . s−1, f 0 = 159, 15 Hz, T0 = 6, 28 ms, te = 7, 1 ms, Q ≈ 7, 1 et
163
Oscillateurs harmoniques. Oscillateurs amortis
fa ≈ 158, 75 Hz pour la fréquence de la vibration amortie, laquelle est dans ce cas pratiquement égale
à la fréquence de la vibration harmonique.
III . 2 . — Adjonction d’une résistance négative
Du seul point de vue de l’équation différentielle à laquelle satisfait la charge du condensateur, il
suffirait d’ajouter une résistance « négative » égale à −R dans le circuit pour compenser le terme dissipatif. Évidemment, un tel résistor n’existe pas. Cependant certains systèmes, que l’on qualifie d’actifs
parce qu’ils contiennent une source auxiliaire d’énergie, se comportent comme des résistances négatives
(cf. Électronique et exercice). La figure 10.12b représente un tel système incluant un amplificateur opérationnel qui joue précisément le rôle d’une résistance négative égale à −R ; conformément à l’usage,
la source auxiliaire d’énergie n’a pas été représentée sur le schéma. On obtient ainsi un oscillateur harmonique électrique dont on peut vérifier l’expression de la période T 0 = 2p/v0 = 2p(LC)1/2 .
IV . — OSCILLATEUR AMORTI PAR FROTTEMENT SOLIDE
Si l’oscillateur est amorti par frottement solide, la force de frottement est opposée à la vitesse et sa
norme est proportionnelle à celle de la réaction (cf. chapitre 9).
IV . 1 . — Équation différentielle du mouvement
Considérons une masselotte A, de masse m, accrochée à un ressort, qui peut glisser sur une
tige horizontale (Fig. 10.13a). L’équation vectorielle du mouvement de A, par rapport au référentiel
terrestre, s’écrit :
m a = R + m g − K (x − l 0) e x
Elle s’explicite suivant l’axe du mouvement Ox et un axe perpendiculaire Oy comme suit :
c Dunod – Toute reproduction non autorisée est un délit
m ẍ = Rx − K (x − l0)
0 = R y − mg
D’autre part, on sait que |Rx | = m|Ry |. Par conséquent, en introduisant v20 = K /m et X = x − l 0, on
obtient :
Ẍ + v20 X = εmg
où ε = +1 si Ẋ < 0 et ε = −1 si Ẋ > 0.
X
D0
D0 4D1 (t/ T0)
y
g
O
K
A(m)
D1
0
− D1
x
− D0
a)
F IG . 10.13.
t1
t2
D0 4D 1 (t/ T0)
b)
t
164
10. Oscillateurs harmoniques. Oscillateurs amortis
IV . 2 . — Nature du mouvement
La solution de l’équation différentielle précédente est la somme de la solution générale de l’équation sans second membre et d’une solution particulière de l’équation globale. Elle s’écrit donc :
mg
X(t) = C cos(v0 t + fx ) + ε 2 d’où Ẋ = −Cv0 sin(v0t + f x )
v0
On doit distinguer deux cas selon que la vitesse Ẋ est négative ou positive.
i) La vitesse Ẋ est négative (ε = 1) ; on a :
X(t) = C cos(v0t + f x ) + D 1
avec
D1 =
mg
v20
Si les conditions initiales sont X = D0 et Ẋ = 0, il vient : D0 = C cos f x + D 1 et 0 = −C sin fx .
On en déduit fx = 0 et C = D0 − D1. Par conséquent :
X(t) = (D 0 − D1) cos(v0 t) + D1
et
Ẋ(t) = −v0(D0 − D1) sin(v 0t)
Le graphe X(t) est une demi-alternance, de pente négative, d’une sinusoïde, de période T0 = 2p/v0
et centrée sur l’axe X = D1 . Cette phase s’achève à l’instant t1 tel que :
Ẋ(t 1) = −v0 (D0 − D 1) sin(v0 t1) = 0
soit pour
t1 =
T0
p
=
2
v0
et X(t1) = −(D 0 − 2D1 )
ii) La vitesse Ẋ est positive (ε = −1) ; dans cette phase, qui débute à t 1 = T 0/2, il vient :
X(t) = C cos(v0t + f x ) − D 1
Comme les conditions à t1 = T0/2 sont X (t1 ) = −(D0 − 2D1) et Ẋ = 0, il vient :
−(D0 − 2D1 ) = C cos(p + fx) − D1
et 0 = −v0 C sin(p + fx )
Par conséquent, f x = 0 et C = D0 − 3D1 . Il en résulte :
X(t) = (D 0 − 3D 1) cos(v 0t) − D1
et
Ẋ = −v0(D 0 − 3D 1) sin(v 0t)
Le graphe X (t) est une demi-alternance, de pente positive, d’une sinusoïde, de période T0 = 2p/v0 ,
centrée sur l’axe X = −D1 . Cette phase s’achève à l’instant t2 pour lequel :
Ẋ(t2) = −v 0(D0 − 3D1) sin(v0 t2 ) = 0
soit pour
t2 =
2p
= T0
v0
et X(t 2) = D0 − 4D 1
IV . 3 . — Mouvement général
Pour obtenir le mouvement général, il suffit de répéter, sur toute période T 0, la même analyse
en distinguant la première demi-période à pente négative et la seconde demi-période à pente positive.
Le graphe X (t) est donc constitué d’une succession de demi-alternances de sinusoïdes, de période
T 0 = 2p/v0 centrées autour de la valeur εD 1 : pour Ẋ < 0 (ε = 1), l’arche descendante est centrée
sur la position D1 , alors que pour Ẋ > 0 (ε = −1), l’arche montante est centrée sur la position
symétrique −D1 (Fig. 10.13b).
On en tire deux résultats essentiels qui permettent de distinguer l’amortissement solide de l’amortissement visqueux :
i) la pulsation des oscillations amorties est la même qu’en l’absence de frottement v a = v0,
165
Oscillateurs harmoniques. Oscillateurs amortis
ii) les élongations maximales varient selon une progression arithmétique : D 0, D0 −4D1 , D0 −8D1
etc. Les courbes reliant les maxima et les minima d’oscillation sont deux droites d’équations :
t
X(t) = ± D0 − 4D1
T0
Ordre de grandeur : Pour un pendule élastique, de raideur K = 4 N . m −1, de masse m = 0, 1 kg,
dont le facteur de frottement est 0, 1, on trouve :
mg
mmg
0, 1 × 0, 1 × 9, 80
D1 = 2 =
=
= 24, 5 mm
K
4
v0
IV . 4 . — Arrêt du mouvement
Dès qu’un extrémum de X (t), qui se caractérise par une vitesse nulle, tombe dans la bande délimitée par les deux valeurs opposées D1 et −D 1, la masselotte s’immobilise. En effet, dans cette bande,
la force de rappel du ressort étant, en valeur absolue, inférieure à la force de frottement, si la masselotte a une vitesse nulle, elle la garde définitivement.
Cette zone, définie par −D1 X D1 , correspond à une incertitude sur la position de la masselotte égale à 2D1. Expérimentalement, on doit la prendre en compte, après avoir tenté de la réduire en
diminuant le facteur de frottement m par un choix convenable des matériaux en contact.
Remarque : Cette analyse se transpose à n’importe quel oscillateur soumis à un frottement solide, tel
qu’un pendule simple constitué d’une perle enfilée dans un guide circulaire matériel.
V . — REPRÉSENTATION DANS L’ESPACE DES PHASES
Pour un oscillateur, à un degré de liberté linéique, l’espace des phases ou l’espace des états est le
plan cartésien (x, px ) avec p x = m ẋ (cf. chapitre 24). Nous nous proposons de représenter, dans un tel
espace, l’oscillateur harmonique et l’oscillateur amorti par frottement visqueux.
V . 1 . — Oscillateur harmonique dans l’espace des phases
c Dunod – Toute reproduction non autorisée est un délit
Dans l’espace des phases bidimensionnel, le point représentatif de l’oscillateur harmonique décrit
une trajectoire elliptique, puisque, d’après l’équation de conservation de l’énergie, on a (Fig. 10.14) :
p 2x
Kx2
+
= Em = Cte
2m
2
soit
x2
p2x
+
= 1 avec a =
a2
b2
! 02
px
a
x
0
F IG . 10.14.
1/2
et b = (2mE m) 1/2
Amortissement
faible
Amortissement
critique (parabole)
b
0
2Em
K
Amortissement
fort
1=¿ e
F IG . 10.15.
166
10. Oscillateurs harmoniques. Oscillateurs amortis
V . 2 . — Oscillateur amorti par frottement visqueux dans l’espace des phases
Pour l’oscillateur amorti par frottement visqueux, la résolution de l’équation caractéristique du
deuxième degré a donné les solutions suivantes :
r=−
1
2te
±
1
− v 20
2
4te
1/2
On répertorie parfois les différents cas à l’aide du plan cartésien ( 1/te , v20 ) (Fig. 10.15). Comme
1/te et v 20 sont positifs, seul le premier quadrant convient ; dans ce plan, la courbe donnant v 20 en
fonction de 1/te , à l’amortissement critique, est une parabole puisque : v 20 = (1/t e) 2 /4. Sur l’axe
des ordonnées, pour lequel l’amortissement est nul, on retrouve le cas harmonique : r = ±jv0 .
Les points situés entre l’axe des ordonnées et la parabole correspondent à des oscillateurs faiblement
amortis. Ceux qui sont situés au-dessous de la parabole représentent les oscillateurs fortement amortis.
Il est instructif de représenter la courbe des points figuratifs dans l’espace des phases. C’est une
spirale convergente si l’amortissement est faible (Fig. 10.16a) et un nœud lorsque l’amortissement est
fort (Fig. 10.16b) ; le nœud est naturellement critique pour Q = v 0t e = 1/2.
px
0
px
x
0
a)
x
b)
F IG . 10.16.
VI . — OSCILLATEURS PARAMÉTRIQUES
VI . 1 . — Définition
Un oscillateur paramétrique est un oscillateur décrit par l’équation différentielle :
ẋ
ẍ + + v2 (t) x = 0
te
2
dans laquelle le paramètre v (t) dépend du temps. Ainsi défini, l’oscillateur paramétrique est linéaire,
puisque toute combinaison linéaire de solutions est aussi une solution.
Si l’on peut négliger l’amortissement t e , l’équation différentielle se réduit à :
ẍ + v 2(t) x = 0
Fréquemment, on rencontre en physique une telle équation avec :
v 2(t) = v20[1 − h cos(Vt)]
V étant une pulsation d’excitation. Cette équation différentielle est appelée équation de Mathieu.
167
Oscillateurs harmoniques. Oscillateurs amortis
VI . 2 . — Exemples mécaniques
a) Pendule simple excité par déplacement de son extrémité
L’extrémité supérieure S d’un pendule simple est soumise à un mouvement oscillatoire vertical
(Fig. 10.17). Son équation différentielle s’obtient en appliquant le théorème du moment cinétique au
point S fixe dans le référentiel non galiléen R = Sx y z , en translation par rapport au référentiel
terrestre R le long de son axe vertical descendant Oz :
d LS
= SA × (mg − mae − a u̇ eu )
dt
la force de Coriolis étant nulle car VR /R = 0. On obtient, en explicitant :
ml2 ü = −ml(g − z̈) sin u − la u̇
Comme OS = dm cos(Vt + fs), il vient, en posant v 20 = g/l et a/(ml) = 1/te :
V2d m
g
u̇
ü +
+ v 20 1 +
te
cos(Vt + f s) sin u = 0
L’équation canonique d’un tel oscillateur peut donc s’écrire, dans l’approximation linéaire (sin u ≈ u),
pour dm suffisament faible (V 2 dm /g 1) et en choisissant fs = p :
ẍ +
ẋ
+ v 20 [1 − h cos(Vt)]x = 0
te
L
i
R
uRL
i
x
S
O
l
C
uC
Multiplieur
x
c Dunod – Toute reproduction non autorisée est un délit
z
u s= Ku Cu e
ue
µ
S
A(m)
F IG . 10.17.
F IG . 10.18.
VI . 3 . — Exemple électrique
L’exemple électrique d’oscillateur paramétrique est fourni par le circuit circuit RLC dans lequel
le paramètre C qu’est la capacité du condensateur évolue selon :
C(t) =
C0
1 − h cos(v e t)
L’équation différentielle à laquelle satisfait la charge de l’armature considérée du condensateur s’écrit :
1
1 − h cos(v e t)
q̇
=
= v20 [1 − h cos(ve t)]
q̈ + + v 2 (t)q = 0 avec v 2(t) =
te
LC(t)
LC 0
Cette variation de C(t) était autrefois obtenue en faisant varier la distance entre les armatures du
condensateur. Actuellement, on préfère utiliser un montage multiplieur tel que celui représenté sur la fi-
168
10. Oscillateurs harmoniques. Oscillateurs amortis
gure 10.18, dans lequel on reconnaît aisément les composants électriques L , C , R caractéristiques de
l’oscillateur amorti. Avec les notations indiquées sur la figure, on obtient l’équation différentielle :
q̈ +
q̇
+ v 20(1 − Kue )q = 0 avec
te
v 20 =
1
LC
et te =
L
R
ue étant la tension aux bornes du générateur à l’entrée du multiplieur et K un coefficient du multiplieur
(cf. Électronique).
a) Botafumeiro et balançoire
Considérons un pendule simple dont on peut faire varier la longueur périodiquement, par exemple
en tirant brusquement sur le fil qui passe par le point de suspension O (Fig. 10.19a). Comme les forces
de tension qui s’exercent sur la masselotte A passent par le point de suspension, leurs moments sont
nuls. Le mouvement s’effectuant dans un plan vertical Oxy , le théorème du moment cinétique donne :
dL
= −mgl(t) sin u e z avec
dt
L = ml(t) 2 u̇ e z
Pendant la très faible durée t , pendant laquelle on tire ou on lâche le fil, le moment cinétique ne change
pas, puisque, entre les instants tc et tc + t , on a :
tc +t
tc
dL
dt = −
dt
tc +t
tc
mgl(t) sin u d t e z
d’où
(DL)ttcc t = −mg
t c +t
tc
l(t) sin u d t e z
Or le second membre est négligeable si u ≈ 0 (passage à la verticale, puisque, pendant la durée t ,
l(t) sin u ≈ 0 . Le moment cinétique ne varie donc pas, pendant cette durée :
(DL)ttcc+t ≈ 0
d’où
ml2(t c) u̇(tc ) = ml2 (t c + t) u̇(tc + t)
Entre les instants tc et t c + t , où la verticale est atteinte, la variation d’énergie cinétique a pour expression :
Ek(t c + t) − Ek (tc) =
On en déduit :
u̇2(tc + t)
1 2
1
ml (tc + t) u̇ 2(tc + t) − ml 2(t c)u̇2(t c) = Ek (t c)
−1
2
2
u̇2(tc )
Ek (tc + t)
u̇2(tc + t)
=
E k(t c)
u̇2 (tc)
Cette variation d’énergie cinétique est due au travail de la force nécessaire pour modifier la longueur du
fil. Ce travail est positif lorsqu’on raccourcit le fil et négatif quand on l’allonge.
On voit que l’on augmente efficacement l’énergie cinétique, en diminuant la longueur du fil, si
cette dernière est maximale, c’est-à-dire lorsque le pendule passe par la verticale. En revanche, aux
extrémités, où le pendule a une vitesse nulle, on restitue la longueur initiale.
Un exemple célèbre de ce type d’oscillateur est l’encensoir géant de la cathédrale de Saint-Jacques
de Compostelle, appelé « botafumeiro » : « botar » signifie lancer en castillan et « fumeiro » fumée en
galicien (Fig. 10.19a). La masse de ce récipient, rempli de braises et d’encens, est de 50 kg et sa
longueur vaut l1 = 20, 6 m ; cette dernière diminue de 3 m lorsque le pendule passe par la verticale.
Sur la figure, on voit, en appliquant la conservation de l’énergie mécanique au pendule de longueur
OA0 = l0 , entre l’instant initial t = 0 (u = u0 ) et l’instant t c du premier passage par la verticale
(u = 0) :
Ek(B0) = mgl0 (1 − cos u0)
169
Oscillateurs harmoniques. Oscillateurs amortis
O
g
g
C
C
A0
B1
B0
C
C
a)
b)
F IG . 10.19.
La corde étant alors rapidement raccourcie jusqu’à la longueur OB1 = l 1 , lors de ce passage, l’application de la conservation de l’énergie, entre cet instant t c + t et l’instant t 1 où le pendule fait l’angle u1
avec la verticale, donne :
Ek(B1) = mgl1 (1 − cos u1)
Il en résulte :
ml2 u̇2(tc + t)/2
u̇(tc + t)
l2
Ek (B1 )
= 1 2 2
=
= 02
Ek (B0 )
l1
ml0u̇ (t c)/2
u̇(tc )
puisque ml 21u̇(t c + t) = ml20u̇(t c). Ainsi :
l1(1 − cos u1 )
l2
Ek (B1)
=
= 02
l0(1 − cos u0 )
Ek (B0)
l1
d’où l’on déduit :
l 30
l31
sin2 (u1/2)
1
=
=
avec
K
=
<1
K
l 31
l30
sin2 (u0/2)
c Dunod – Toute reproduction non autorisée est un délit
on peut atteindre des amplitudes de u proche de p/2 , ce qui permet d’encenser (remplir d’encens) la
cathédrale, si l’on répète n fois cette même opération. On a alors :
sin2(u n/2)
sin 2(un /2)
sin2 (u1 /2)
sin2(u n/2)
1
·
·
·
=
=
=
sin2(u 0/2)
sin 2(un−1 /2)
sin2 (u0 /2)
sin2(u 0/2) K (n+1)
Si l1 /l0 ≈ 0,9 alots 1/K ≈ 1,37 ce qui permet de passer de u0 ≈ 0,1 rad à un ≈ p/2 en 18
opérations, puisque :
lg 400
n+1 =
≈ 19
lg 1,37
L’amplitude des oscillations augmentant, on dit qu’il y a amplification paramétrique. La condition
pour qu’une telle amplification se produise est que la période de l’excitation soit égale à une demipériode propre de l’oscillateur :
2v 0
T0
d’où V =
T=n
2
n
C’est bien ce que l’on peut constater expérimentalement. Si la condition sin u ≈ u n’est plus réalisée,
ce qui est souvent le cas, compte tenu de la vocation du pendule, l’oscillateur paramétrique n’est plus
linéaire.
170
10. Oscillateurs harmoniques. Oscillateurs amortis
Remarque : Un enfant sur une balançoire réalise aussi un oscillateur paramétrique (Fig. 10.19b) ; en
se redressant au passage par la verticale et en s’accroupissant pour les valeurs extrêmes
de l’angle d’inclinaison u , il fait varier la longueur du pendule simple équivalent et ainsi
amplifie l’amplitude des oscillations.
VII . — EFFETS DE TERMES NON LINÉAIRES
Les termes non linéaires dans l’équation différentielle d’un oscillateur jouent un rôle important
pour des raisons à la fois théoriques et techniques. D’une part, ils induisent des comportements parfois
surprenants voire chaotiques, en tout cas non prédictifs. D’autre part, certains de ces oscillateurs sont
capables de s’auto-entretenir, c’est-à-dire de puiser, dans une source extérieure, l’énergie qui est perdue
par frottement ; on les appelle oscillateurs de relaxation.
VII . 1 . — Pendule simple non linéaire
Si l’amplitude d’un pendule simple n’est pas assez faible pour justifier l’approximation sin u = u,
l’équation différentielle du mouvement s’écrit :
ü + v20 sin u = 0
On sait que le mouvement d’un tel pendule est oscillatoire ou révolutif suivant la valeur de son énergie initiale et que l’oscillation n’est sinusoïdale qu’au voisinage du minimum de l’énergie potentielle
(cf. chapitre 9). En remplaçant sin u par un développement à l’ordre trois, on obtient l’équation différentielle suivante :
u3
v20 3
2
2
u =0
u
−
u
−
ü + v0
= 0 soit ü + v0
3!
6
Injectons la solution approchée u = um sin(vt) que l’on connaît lorsque initialement u = 0 et u̇ = 0.
Il vient :
v2
(−v2 + v20 ) um sin(vt) − 0 u3m sin 3 (vt) = 0
6
soit, puisque 4 sin3 (vt) = 3 sin(vt) − sin(3vt) :
−v 2 + v20 +
v20 2
v2
u m um sin(vt) − 0 u 3m sin(3vt) = 0
8
24
Comme cette équation doit être vraie à tout instant, il en résulte, en annulant le coefficient de sin(vt),
le terme en sin(3vt) étant négligeable :
−v 2 + v 20 −
v20 2
u =0
8 m
Finalement, la non-linéarité modifie la pulsation et la période selon :
v = v0
u2
1− m
8
1/2
et T ≈ T 0
u2
1+ m
8
1/2
≈ T0 1 +
u2m
16
Ainsi, la période de cet oscillateur non linéaire dépend aussi de son amplitude initiale ; sa valeur minimale est la période propre T 0.
171
Oscillateurs harmoniques. Oscillateurs amortis
VII . 2 . — Vibrations anharmoniques des molécules
L’observation, grâce à des méthodes spectroscopiques, du comportement vibrationnel des molécules formées par une liaison covalente, par exemple celui du diazote, a conduit le chimiste P. Morse
à adopter comme énergie potentielle effective, caractérisant l’interaction entre les atomes distants de r
(cf. chapitre 13), la fonction radiale suivante :
2
E p,ef = E 0 {1 − exp [−a(r − r0 )]}
soit
E p,ef = E0 {exp[−2a(r − r0 )] − 2 exp[−a(r − r0 )]}
à une constante additive près E0 sans intérêt. Dans cette expression, dont le graphe est représenté sur la
figure 10.20, l’énergie E0 est l’opposée de la valeur minimale de Ep,ef , obtenue pour r = r0, et a une
constante positive homogène à l’inverse d’une longueur. Le développement de Taylor de cette fonction
autour de r = r0 donne :
Ep,ef (r) ≈ E p,ef (r0) +
d2 E p,ef
d r2
(r − r0)2
2!
+
0
d3 Ep,ef
d r3
(r − r0)3
3!
0
soit, en posant E p,ef (r0 ) = −E0 :
Ep,ef (r) ≈ −E0 + K
(r − r 0) 2
(r − r0) 3
+A
2
6
avec
d2 Ep,ef
d r2
K=
et A =
0
d3 E p,ef
d r3
0
Près de r0, l’approximation harmonique ou linéaire (terme quadratique dans l’énergie potentielle et
linéaire dans la force), est suffisante. Loin de r0 , seule la prise en compte de l’anharmonicité, due à des
termes non linéaires (terme à la puissance trois dans l’énergie potentielle et quadratique dans la force),
permet d’expliquer correctement les fréquences de vibration observées.
Ep,ef
c Dunod – Toute reproduction non autorisée est un délit
0
r0
r
−E 0
F IG . 10.20.
VII . 3 . — Effets non linéaires sur un pendule simple paramétrique
Les effets non linéaires apparaissent rapidement dans un pendule simple paramétrique en raison de
l’amplification des oscillations. L’équation caractéristique n’est plus alors linéaire :
ü +
u̇
+ v 20[1 − h cos(Vt)] sin u = 0
te
Par exemple, l’amplitude angulaire maximale du botafumeiro atteint 82 ◦ (Fig. 10.19a). De même pour
l’enfant sur une balançoire (Fig. 10.19b) : en se levant à chaque passage par la verticale et en s’accroupissant aux extrémités, l’enfant peut amplifier les oscillations jusqu’à rendre le mouvement révolutif !
172
10. Oscillateurs harmoniques. Oscillateurs amortis
VII . 4 . — Oscillateurs de relaxation
a) Définition
Les oscillateurs de relaxation sont des systèmes qui évoluent périodiquement entre deux états de
fonctionnement d’énergies différentes, grâce à une source extérieure d’énergie. On les appelle ainsi en
raison du retour périodique du système vers un état de plus faible énergie.
b) Vase de Tantale
L’exemple mécanique d’oscillateur de relaxation est la fontaine intermittente. On la représente par
un vase que l’on remplit d’eau, avec un débit-volume qv constant, jusqu’à ce que le niveau atteigne le
sommet H1 d’un siphon (Fig. 10.21a). On distingue deux phases cinématiques.
i) Phase 1 : le vase se remplit
L’équation à laquelle satisfait la cote z du niveau de l’eau est fournie par le bilan de masse du fluide
supposé incompressible (cf. chapitre 30). Il vient, en désignant par S la section du vase de remplissage
et en comptant la cote à partir de l’extrémité basse du siphon :
S d z = qv d t
d z qv
= Cte
=
dt
S
soit
ii) Phase 2 : le vase se vide
Le bilan de masse donne, s étant est la section à l’extrémité du siphon et v la vitesse d’écoulement
en ce point :
S d z = qv d t − sv d t
soit
dz
qv
s
− (2gz)1/2 car v = (2gz) 1/2
=
dt
S
S
d’après le théorème de Torricelli (cf. chapitre 30). Cette phase cesse lorsque le siphon se désarmorce,
puis le cycle recommence. Sur la figure 10.21b, on a représenté le graphe de la fonction z(t) qui reproduit périodiquement une partie rectiligne (phase 1) et une partie parabolique (phase 2).
Remarque : Le nom Tantale est celui d’un roi de Lydie qui, selon l’Odyssée, aurait été contraint par
les dieux au supplice de l’eau. Cet instrument de torture consiste en des oscillations de
relaxation du niveau de l’eau du fleuve au milieu duquel Tantale fut attaché : le niveau du
fleuve descendait dès qu’il se penchait pour boire et remontait lorsqu’il se redressait.
z
z
h1
H1
Siphon
h1
h2
h2
H2
O
a)
t
b)
F IG . 10.21.
c) Analogie électrique
En électricité, les oscillateurs de relaxation jouent un rôle majeur ; l’exemple typique est le multivibrateur qui est constitué essentiellement de séquences de charge et de décharge d’un condensateur
dans un conducteur ohmique. Un autre exemple plus simple est fourni par la tension aux bornes d’une
lampe au néon.
173
Oscillateurs harmoniques. Oscillateurs amortis
d) Équation de van der Pol
L’analyse montre que les oscillateurs de relaxation sont décrits par l’équation différentielle d’un oscillateur amorti, dans laquelle figure des termes supplémentaires non linéaires (cf. Électronique). L’importance de la non-linéarité doit être attribuée à la capacité de ces termes à permettre un entretien des
oscillations. On a vu qu’une façon d’éviter l’amortissement en électricité était d’introduire dans le circuit une résistance négative, ce que l’on sait réaliser à l’aide d’une source auxiliaire et d’un amplificateur
opérationnel. L’équation canonique s’écrit :
1
1
ẍ +
− ẋ + v 20 x = 0
te t e
L’exacte compensation est impossible à réaliser de façon stable ; aussi remplace-t-on le coefficient de x˙
par une fonction parabolique de x, ce qui rend non linéaire l’équation de l’oscillateur :
ẍ + r(x) ẋ + v 20 x = 0
avec
r=
1 2 2
(b x − 1)
te
Cette équation a été introduite pour la première fois, en 1896, par J. Rayleigh, puis, longuement étudiée
par B. Van der Pol en 1927, dans le cas des circuits électriques ; aussi l’appelle-t-on l’équation de Van
der Pol.
Le graphe r(x) est une parabole qui passe par un minimum égal à −1/t e pour x = 0. On voit
que, pour x faible, tel que b2 x2 1, l’équation est celle d’un oscillateur dont l’amplitude augmente
puisque r(x) est négatif. Cette amplification cesse dès que |x| atteint la valeur 1/b.
Si l’amortissement est faible (te fort), on obtient une amplification du signal puis des oscillations
sinusoïdales entretenues (Fig. 10.22a).
Si l’amortissement est fort (t e faible), les oscillations diffèrent notablement d’oscillations sinusoïdales ; ce sont des oscillations de relaxation (Fig. 10.22b).
x(t)
x(t)
c Dunod – Toute reproduction non autorisée est un délit
O
t
a)
O
F IG . 10.22.
t
b)
CONCLUSION
Soulignons toute l’importance de l’étude liée au comportement en oscillateur linéaire de tout système matériel, légèrement perturbé à partir de sa position de repos.
(1) Les oscillations harmoniques autour d’une position d’équilibre se font avec une pulsation qui
ne dépend que des paramètres de l’oscillateur, ce qui permet de les déterminer. On comprend ainsi tout
l’intérêt de provoquer ce type d’oscillations. De tels oscillateurs sont caractérisés par des équations de
la forme :
v 2ẋ 2
ẋ2
ẍ + v20 x = 0 ou
+ 0 = Cte
2
2
(2) Les forces de frottement visqueux de type Stokes modifient l’équation de l’oscillateur harmonique selon :
ẋ
+ v 20 x = 0
ẍ +
te
174
10. Oscillateurs harmoniques. Oscillateurs amortis
L’équation est encore linéaire mais l’amplitude subit un amortissement exponentiel que l’on caractérise
soit par la durée de relaxation en énergie te , soit par le facteur de qualité Q, soit par le décrément
logarithmique L :
1
Ta
K
avec va = v 0 1 −
=
2te
4Q 2
vate
(3) Dans le cas de l’oscillateur élastique amorti m, a, 1/K , on a :
Q = v 0te
et L =
1/2
K 1/2
m
mv0
et Q = v0te =
te =
m
a
a
Pour l’oscillateur électrique amorti RLC, ces quantités valent :
v0 =
L
Lv 0
1 1/2
et Q = v0 te =
te =
LC
R
R
(4) Du fait de la linéarité, l’oscillateur amorti par frottement visqueux de Stokes a des mouvements prévisibles. Il constitue un modèle très utile pour décrire, dans d’autres domaines de la physique,
l’amortissement d’un oscillateur (cf. Électromagnétisme et Optique). Ajoutons qu’en faisant varier l’un
des paramètres de cet oscillateur, on réalise un oscillateur paramétrique, dont l’amplitude peut être amplifiée.
(5) En mécanique, l’oscillateur élastique soumis à un frottement solide satisfait à une équation non
linéaire, dont la résolution est plus laborieuse que dans le cas d’un frottement visqueux de Stokes.
(6) Les termes non linéaires permettent de décrire une catégorie importante d’oscillateurs, largement utilisés en électronique : les oscillateurs de relaxation. Dans certains cas, ces termes sont à l’origine
de comportements singuliers, voire chaotiques.
v0 =
EXERCICES ET PROBLÈMES
P10– 1. Composition des raideurs de ressorts
On considère deux ressorts de même longueur l et de raideurs différentes K 1 et K 2.
1. Les ressorts sont placés verticalement en parallèle. L’extrémité supérieure est fixe et l’autre porte
une masselotte A, de masse m (Fig. 10.23a). Trouver l’expression de la pulsation de l’oscillateur ainsi
formé. Conclure.
2. Même question lorsque les ressorts sont placés en série (Fig. 10.23b). Conclure.
K1
K1
K2
O
I
A
K2
g
θ
K
A
a)
b)
F IG . 10.23.
l
K
A
F IG . 10.24.
175
Oscillateurs harmoniques. Oscillateurs amortis
P10– 2. Pendule simple et élastique
La masselotte d’un pendule simple est soumise aussi à l’action de deux ressorts identiques qui
exercent des forces de rappel horizontales (Fig. 10.24).
1. Sachant que ces forces sont nulles lorsque le pendule est vertical, établir l’équation différentielle
des petits mouvements du pendule simple. En déduire l’expression de la période du mouvement.
2. Une force de frottement visqueux provoque un amortissement dont le coefficient a est égal au
dixième du coefficient critique. Calculer le facteur de qualité du pendule.
P10– 3. Oscillations d’un pendule élastique
Un pendule élastique A (masse m = 0, 1 kg, raideur K = mv 20 = 20 N . m−1 ) oscille, sans frottement solide, le long d’une tige qui fait l’angle u0 constant avec la verticale descendante (Fig. 10.25).
1. a) Établir l’équation différentielle du mouvement de A le long de la tige fixe. Trouver la position
autour de laquelle s’effectuent les oscillations et calculer la période du mouvement.
b) On constate que les oscillations s’amortissent selon une loi exponentielle. À quel type de force
faut-il attribuer cet amortissement ? Au bout de 50 oscillations, l’amplitude est divisée par trois. Calculer le décrément logarithmique L et le facteur de qualité Q de l’oscillateur.
2. On fait tourner la tige uniformément autour de la verticale avec la vitesse angulaire V.
a) Exprimer, dans le référentiel tournant, l’énergie cinétique du pendule, son énergie potentielle de
pesanteur, son énergie potentielle élastique et son énergie potentielle centrifuge.
b) Établir, en l’absence de frottement, l’équation différentielle du mouvement. En déduire la position d’équilibre et la période des oscillations sachant que V sin u 0 = 0, 9 v0 .
Ω
O
g
K
A( m )
c Dunod – Toute reproduction non autorisée est un délit
θ0
F IG . 10.25.
P10– 4. Accéléromètre à pendule élastique
On embarque dans un véhicule, en translation accélérée par rapport au référentiel terrestre, un
oscillateur élastique horizontal dont l’amortissement a été réglé de telle sorte que l’oscillateur n’effectue
pratiquement qu’une oscillation avant de s’immobiliser.
1. Établir l’équation différentielle du mouvement dans le référentiel du véhicule d’accélération
constante ae.
2. Quelle est la solution de cette équation au bout d’une période ? En déduire l’intérêt d’un tel
système.
176
10. Oscillateurs harmoniques. Oscillateurs amortis
P10– 5. Influence de l’amplitude sur la période des oscillations d’un pendule simple
On considère un pendule simple de longueur l que l’on écarte de l’angle u 0 par rapport à la
verticale descendante. On néglige les frottements.
1. Établir l’équation différentielle du mouvement issue de l’application du théorème de l’énergie
mécanique. En déduire la période T0 des petites oscillations.
2. Montrer que, dans le cas général, la période des oscillations a pour expression :
T 0(u 0) = T 0 J
avec
J=
1
p
u0
0
du
2
[sin (u0 /2) − sin2 (u/2] 1/2
3. En posant g = sin(u 0/2) et sin(u/2) = g sin f, trouver, jusqu’à l’ordre 2 en u 0 , l’expression
de T0 (u0 ).
P10– 6. Pendule élastique à deux positions d’équilibre stable
Une masselotte A, de masse m, coulisse sans frottement sur une tige horizontale ; elle est soumise
à l’action d’un ressort, de raideur K et de longueur à vide l0 , dont l’extrémité fixe F est située à une
distance h de la tige (Fig. 10.26). On désigne par x l’abscisse de A sur la tige, comptée à partir de la
projection O de F.
1. Montrer que l’énergie potentielle de A a pour expression, si l’origine est choisie en x = 0 :
Ep = K
x2
− l0 (x2 + h 2) 1/2 + l0 h
2
2. Que devient Ep lorsque h = 0 ? L’oscillateur est alors harmonique. Pourquoi ? Calculer la
fréquence propre f0 de cet oscillateur sachant que m = 0, 1 kg et K = 400 N . m−1.
3. Tracer le graphe E p(x) dans les trois cas suivants : l0 < h, l0 = h et l0 > h. Déterminer les
positions d’équilibre stable.
4. Calculer la valeur de la fréquence d’oscillation dans le cas où h = 10 cm et l 0 = 15 cm.
y
S2
A
F
h
S3
K
O
F IG . 10.26.
A(m)
x
O
S4
F IG . 10.27.
S1
x
Oscillateurs harmoniques. Oscillateurs amortis
177
P10– 7. Pendule élastique bidimensionnel à quatre ressorts
Une masselotte A, de masse m, est accrochée à quatre ressorts identiques, de raideur K 0 et de
longueur à vide l0 (Fig. 10.27). Au repos la masselotte est au centre du carré horizontal formé par les
autres extrémités des ressorts. Le poids de A est compensé par une force de réaction opposée.
1. Montrer, à l’aide d’un raisonnement simple, que l’énergie potentielle élastique a pour expression
quadratique : Ep = K (x2 + y2 )/2, K étant un coefficient que l’on exprimera en fonction de la raideur
K0 d’un ressort.
2. En déduire la fréquence d’oscillation autour de la position d’équilibre.
3. Quelles sont les différentes trajectoires de A ?
P10– 8. Pulsation d’un plasma. Plasmon
Un métal peut être considéré comme un ensemble d’ions positifs, fixes, régulièrement espacés et
d’un ensemble d’électrons libres.
1. Montrer que le déplacement de l’ensemble des électrons, suivant une direction, d’une valeur x
autour de la position d’équilibre, produit un champ électrique. Préciser le sens et la valeur de ce champ,
en fonction de x et du nombre d’électrons par unité de volume ne .
2. Exprimer, en fonction de n e , la pulsation vp d’oscillation du plasma. On posera q 2e = e2/(4pε0 )
avec e ≈ 1, 6 × 10−19 C.
3. Calculer la quantité v p en eV pour l’aluminium, de masse molaire 27 g . mol −1 et de masse
volumique r ≈ 2, 7 g . cm −3. On rappelle que ≈ 1, 05 × 10 −34 J . s.
P10– 9. Potentiel de Morse
La fonction énergie potentielle de Morse, en un point de coordonnée radiale r par rapport à un
centre de force O, a pour expression :
Ep,ef (r) = E 0 {exp[−2a(r − r 0)] − 2 exp[−a(r − r0 )]}
c Dunod – Toute reproduction non autorisée est un délit
avec E0 ≈ 7,37 eV et r 0 = 109 pm pour la molécule de diazote.
1. Montrer que cette fonction passe par un minimum que l’on calculera. En déduire la signification
de r 0, E 0 et 2a2 .
2. Effectuer le développement de la fonction E p,ef (r) jusqu’à l’ordre trois inclus. Sachant que
a ≈ 3,14 × 1010 m −1 calculer les coefficients K et A directement reliés aux dérivées d’ordre 2 et 3.
P10– 10. Période du botafumeiro
La longueur du pendule du botafumeiro vaut 20, 6 m lorsque le pendule atteint son amplitude
maximale ; elle vaut 3 m de moins lorsqu’il passe par sa position d’équilibre.
On a mesuré la période de ce pendule lorsque son amplitude angulaire u m était de 13 ◦ puis 82◦ ;
on a trouvé respectivement : T1 = 9, 1 s et T2 = 10, 5 s. Comparer ces valeurs à celles obtenues à
l’aide de la formule approchée donnant la période T en fonction de l et u m.
11
Oscillations forcées.
Résonance
Nous savons qu’un oscillateur sinusoïdal excité, soit par un déplacement par rapport à sa position
d’équilibre, soit par une vitesse initiale non nulle, oscille et s’amortit du fait de la présence des forces
de frottement qui dissipent son énergie.
La question à laquelle nous nous proposons de répondre dans ce chapitre est la suivante : comment
se comporte un tel oscillateur lorsqu’on lui applique une force excitatrice sinusoïdale ? Cette question
est essentielle car, à l’aide de l’analyse de Fourier, on peut ramener le cas d’une excitation quelconque
à celui d’une somme d’excitations sinusoïdales (cf. Optique).
Avant tout, donnons quelques exemples simples de systèmes physiques soumis à de forces excitatrices sinusoïdales.
I . — EXEMPLES PHYSIQUES D’OSCILLATIONS FORCÉES
I . 1 . — Pendule élastique
On peut provoquer des oscillations forcées d’un pendule élastique en lui imposant un déplacement
sinusoïdal. Ce cas fréquent dans la pratique peut être illustré par l’exemple qui suit.
L’oscillateur est constitué par un pendule élastique vertical A (masse m, raideur K) dont l’extrémité supérieure S a un mouvement oscillatoire harmonique, de pulsation v, imposé par un moteur
(Fig. 11.1). On détecte le mouvement, de A, par rapport au référentiel du laboratoire R, supposé galiléen, en mesurant la variation de la tension entre une borne de référence et l’extrémité d’une tige
conductrice liée à la masselotte en mouvement dans l’électrolyte.
Écrivons l’équation différentielle du mouvement du pendule, en introduisant une force de frottement de Stokes F S = −av, proportionnelle à la vitesse v (cf. chapitre 31). L’axe Ox étant orienté
suivant la verticale descendante, il vient :
m a = m g − K(x − x S − l0) ex − av
où xS = OS désigne la coordonnée de l’extrémité supérieure du ressort. Comme x S = d m cos(vt + fe ),
on a :
mẍ = −K(x − l 0 ) − aẋ + mg + Kdm cos(vt + f e )
soit, en introduisant le = l 0 + mg/K et en procédant au changement de variable X = x − l 1 :
mẌ + a Ẋ + KX = Kd m cos(vt + fe )
179
Oscillations forcées. Résonance
En divisant par la masse, on fait apparaître la pulsation propre v 0 = (K /m)1/2 et la durée de relaxation
en énergie te = m/a. L’équation précédente prend alors la forme canonique suivante :
Ẍ +
Ẋ
+ v 20X = e m cos(vt + fe)
te
avec
em =
Kd m
Fm
=
m
m
en posant Fm = Kdm
O
O
S
ω
Moteur
g
K
R
L
A
Ai
++++++++
u(t)
q
C
x
F IG . 11.1.
F IG . 11.2.
I . 2 . — Source de tension sinusoïdale aux bornes du dipôle électronique RLC
c Dunod – Toute reproduction non autorisée est un délit
On réalise facilement un problème électriquement équivalent au précédent en maintenant, aux
bornes d’un dipôle électronique RLC, une tension sinusoïdale u(t) = um cos(vt + fe) (Fig. 11.2).
La loi des mailles appliquée au circuit donne, si q(t) désigne la charge de l’armature A du condensateur (cf. Électronique) :
q
di
dq
u(t) = L + Ri +
avec i =
C
dt
dt
Il en résulte que :
d2 q
dq
q
L 2 +R
+ = u m cos(vt + fe )
dt
dt C
2
soit, en introduisant v0 = 1/(LC) et t e = L/R :
q̈ +
q̇
+ v20 q = em cos(vt + fe)
te
avec
em =
um
L
I . 3 . — Modèle de l’électron élastiquement lié
Lorsqu’on étudie, d’un point de vue classique (non quantique), le comportement de la matière soumise à l’action d’un champ électromagnétique (E, B), on constate qu’un modèle efficace d’interprétation et de prédiction consiste à admettre que les électrons atomiques sont élastiquement liés à leur
position moyenne (cf. Électromagnétisme) : tout se passe comme si les électrons étaient soumis à une
force de rappel −Kr, r étant l’écart par rapport à une position moyenne. On tient compte du rayonnement émis par ces électrons accélérés en introduisant une force supplémentaire équivalente à une force
de frottement visqueux −av. Enfin, le champ électromagnétique exerce sur ces particules, de charge
−e, la force sinusoïdale suivante :
−eE = Fm cos(vt + fe ) e r
180
11. Oscillations forcées. Résonance
L’équation différentielle du mouvement est donc :
Fm
ṙ
cos(vt + fe ) e r
+ v20 r =
te
m
En projection sur l’axe de la coordonnée radiale r, cette équation s’écrit :
r̈ +
r̈ +
ṙ
+ v 20 r = em cos(vt + fe)
te
avec
em =
Fm
m
I . 4 . — Sismographe
Comme son nom l’indique, le sismographe est un instrument chargé d’enregistrer les mouvements
vibratoires de l’écorce terrestre par rapport à un référentiel galiléen R. Il peut être représenté par un
pendule élastique dont l’extrémité supérieure S est fixée au boîtier de l’instrument qui repose sur le sol
(Fig. 11.3).
Le mouvement de A par rapport à R , non galiléen, s’obtient en ajoutant aux forces habituelles
(poids m g, tension du ressort −K (x − l0 ) ex , force de frottement visqueux a ẋ ex ), la force d’inertie
d’entraînement −m aS, la force d’inertie de Coriolis étant nulle du fait de la translation. On a donc :
m aA/R = m g − K (x − l0 ) ex − a ẋ ex − m aS
soit
ẍ = g − v20(x − l0) −
ẋ
− ẍS
te
En introduisant, ici aussi, le = l 0+ mg/K et X = x − l e , on obtient, puisque xS = OO = dm cos(vt +
fe ) et donc ẍS = −v 2 dm cos(vt + fe ) :
Ẍ +
Ẋ
+ v 20 X = e m(v) cos(vt + fe)
te
em(v) = d mv2
y
O
O
avec
S
y
K
g
x
A
Enregistreur
Entrée
R
F IG . 11.3.
Système
Sortie
F IG . 11.4.
I . 5 . — Réponse linéaire et résonance
Les équations différentielles précédentes se présentent toutes sous la forme canonique suivante :
ẍ +
ẋ
+ v 20 x = em (v) cos(vt + fe )
te
l’amplitude em (v) du terme d’excitation étant parfois fonction de la pulsation. C’est le cas dans un
sismographe et plus généralement si l’excitation est une fonction e(t) quelconque du temps ; en effet,
l’amplitude des différentes composantes sinusoïdales de e(t) dépend de v (cf. Optique).
181
Oscillations forcées. Résonance
En théorie des systèmes, on considère l’oscillateur non excité comme un système qui fait correspondre une réponse ou « sortie » à une excitation ou « entrée » (Fig. 11.4). La question posée en introduction est alors exprimée autrement sous la forme suivante : quelle est la réponse du système si on le
soumet à une excitation sinusoïdale ?
Pour y répondre, on teste d’abord la linéarité du système soumis à l’excitation. On sait que l’oscillateur amorti par frottement de Stokes est linéaire ; si on le soumet à une combinaison linéaire de deux
excitations ou entrées e1(t) et e2 (t), de sorties respectives s1(t) et s2 (t), le système admet comme
sortie la même combinaison linéaire des réponses :
l1 e1(t) + l 2e 2 (t)
→
l1s 1(t) + l 2 s2(t)
Dans ce cas, l’intérêt de l’analyse ne se réduit pas à la seule détermination du mouvement de
l’oscillateur sous l’action d’une excitation sinusoïdale. L’étude concerne toute la théorie de la réponse
linéaire d’un circuit électrique ou d’un matériau si on les soumet à une excitation quelconque. Cette
dernière est décomposée en signaux sinusoïdaux dont on étudie les réponses qu’en donne le système.
En recomposant linéairement ces sorties élémentaires, on obtient la réponse à l’excitation initiale.
Le système se comporte différemment selon la valeur de la pulsation v de la vibration excitatrice. Le phénomène d’exaltation de certaines grandeurs que l’on observe lorsque v = v0 est appelé
résonance. On le retrouve dans la plupart des domaines de la physique, notamment en physique moderne où on le décrit naturellement à l’aide du concept d’énergie.
II . — OSCILLATIONS FORCÉES. RÉSONANCE
II . 1 . — Régime transitoire et régime forcé
La solution de l’équation différentielle précédente :
ẋ
+ v20 x = em cos(vt + fe )
ẍ +
te
est la somme de deux termes :
c Dunod – Toute reproduction non autorisée est un délit
i) la solution générale de l’équation sans second membre (cf. chapitre 10) :
t
x(t) = A exp −
cos(va t + fa)
2te
ii) la solution particulière de l’équation totale : B cos(vt + f x ).
Entre l’instant initial et une certaine durée, qui dépend de te , au-delà de laquelle le premier terme est
négligeable devant le second, le régime est transitoire :
t
x(t) = A exp −
cos(va t + fa ) + B cos(vt + fx )
2te
Une fois le régime transitoire achevé, on observe le régime forcée ou établi de la forme :
x(t) = x m cos(vt + f x )
Dans la suite, nous étudierons uniquement ce régime forcé.
II . 2 . — Élongation de l’oscillateur
Afin de déterminer la solution particulière de l’équation différentielle canonique, nous allons utiliser la méthode complexe qui consiste à associer, à l’équation différentielle précédente, l’équation diffé-
182
11. Oscillations forcées. Résonance
rentielle suivante à laquelle satisfait la grandeur complexe x = x + jy avec j2 = −1 :
ẋ
ẍ + + v20x = e m exp[j(vt + fe )]
te
La solution réelle x(t) s’obtient en prenant la partie réelle de x(t). Cherchons une solution de la forme :
x(t) = xm exp(jvt)
où
x m = xm exp(jfx)
est l’amplitude complexe de l’élongation. Comme ẍ = −v2x et ẋ = jv x, on a :
v
−v2 + j + v20 xm = a m exp[j(vt + fe)] = em exp(jvt)
te
em = em exp(jfe ) étant l’amplitude complexe de l’excitation. On en déduit :
xm =
em
2
(−v + v 20) + jv/te
soit
xm =
Qem/v20
u[Q(1/u − u) + j]
en introduisant le rapport des pulsations u = v/v 0. Il en résulte que x(t) = x m cos(vt + fx ) avec :
xm =
em
(v20 − v 2) 2 + v2 /t2e
1/2
=
Qem /v20
u [1 + Q 2(u − 1/u)2 ]
1/2
=
em/v20
[(a 2 − 1)2 + u2 /Q2 ]1/2
et
tan(fx − fe ) =
v/te
1
=
2
Q(u − 1/u)
v2 − v0
II . 3 . — Vitesse de l’oscillateur
Comme la vitesse de l’oscillateur est donnée par ẋ, écrivons ẋ sous la forme :
dx
= v m exp(jvt) = v m exp[j(vt + f v)]
ẋ =
dt
v m étant l’amplitude complexe de la vitesse, vm son amplitude et f v sa phase à l’origine. Or, d’après
ce qui précède :
Qe m /v20
exp(jvt)
ẋ = jvxm exp(jvt) = jv
u[Q(1/u − u) + j]
En identifiant, on obtient :
vm =
em te
1 + jQ(u − 1/u)
On en déduit :
vm = vxm =
emte
[1
+ Q2 (u
1/2
− 1/u)2]
et
tan(fv − fe ) = −Q u −
La vitesse ẋ est ainsi en avance de phase de p/2 par rapport à l’élongation x :
p
p
soit fv − f e = fx − f e +
fv = fx +
2
2
1
u
183
Oscillations forcées. Résonance
II . 4 . — Admittance généralisée. Résonance
a) Admittance généralisée
Par définition, on appelle admittance généralisée Y g le rapport de l’amplitude complexe de la
« sortie-vitesse » sur celle de « l’entrée-excitation » :
Yg =
vm
em
soit
Yg =
te
1 + jQ(u − 1/u)
Ainsi définie, Yg a la dimension d’une durée. On en déduit le module et sa phase :
te
Yg = |Yg| exp(jfy) avec |Y g| =
et f y = fv − fe
1/2
1 + Q 2 (u − 1/u) 2
Conventionnellement, on introduit la différence de phase, notée w, entre la phase de l’excitation f e et
celle de la vitesse fv :
avec
w = −f y = fe − f v
tan w = Q u −
1
u
b) Résonance
Sur la figure 11.5, on a représenté |Y g| et w en fonction de u et Q. On voit que, pour u = 1,
c’est-à-dire pour une pulsation de l’excitation égale à la pulsation propre du système, le module de l’admittance généralisée passe par un maximum, qui vaut te ; en outre, la vitesse est en phase avec l’excitation. Notons que l’admittance prend une valeur infinie dans le cas limite où il n’y a pas d’amortissement.
Yg
Yg
p
2
max
w = fe -fv
0
c Dunod – Toute reproduction non autorisée est un délit
0
v
u=v
1
a)
v
u=v
1
0
-p
2
0
b)
F IG . 11.5.
On appelle résonance le phénomène d’exaltation de l’admittance généralisée d’un système qui fait
correspondre un signal de sortie à un signal d’entrée, que l’on observe pour :
v = v0
On estime l’importance de la résonance par la finesse du pic représentant le graphe |Yg |(u). Pour cela,
√
on calcule les valeurs de u pour lesquelles, conventionnellement, |Y g| = |Y g|max/ 2. On a donc :
Q2 u −
1
u
2
=1
soit
u−
1
ε
=
u
Q
avec
ε = ±1
On obtient donc l’équation u2 − εu/Q − 1 = 0, dont les racines positives sont :
u1 = −
1
1
+
1 + 4Q2
2Q 2Q
1/2
et u 2 =
1
1
+
1 + 4Q2
2Q 2Q
1/2
184
11. Oscillations forcées. Résonance
Ainsi, u2 − u1 = 1/Q. En posant Dv1/2 = v 2 − v 1 = (u2 − u 1) v 0, il vient :
Q=
v0
Dv1/2
ou
Q=
f0
Df 1/2
en fonction de la fréquence. Le facteur de qualité Q s’identifie donc au rapport de la pulsation propre
v0 sur la largeur totale à mi-hauteur Dv1/2 du pic de l’admittance généralisée à la résonance.
i) Si Q est grand, c’est-à-dire Dv 1/2 faible pour une valeur de v0 donnée, la résonance est dite
aiguë. Dans certains oscillateurs mécaniques utilisés en sismographie, le facteur Q peut atteindre des
valeurs de l’ordre de 1 000. Dans des systèmes oscillants électromagnétiques comportant un quartz
piézoélectrique, Q atteint des valeurs encore plus élevées, de l’ordre de 106 .
ii) Dans le cas contraire où Q est faible, la résonance est dite floue.
III . — EXCITATION MAXIMALE INDÉPENDANTE DE LA PULSATION
Dans cette section, on admet que l’amplitude de l’excitation est indépendante de la pulsation v,
ce qui est fréquemment réalisé. C’est en effet le cas de l’expérience du pendule élastique, du modèle
de l’électron élastiquement lié ; c’est aussi celui d’un dipôle électronique si l’amplitude de la tension
sinusoïdale u(t) à ses bornes est indépendante de v. On a alors :
em =
Fm
m
ou
em =
um
L
III . 1 . — Impédance mécanique et impédance électrique
a) Impédance mécanique
On appelle impédance mécanique de l’oscillateur le rapport entre l’amplitude complexe F m de la
force excitatrice et celle vm de la vitesse :
Zm =
1
Fm
m
=
= a 1 + jQ u −
vm
Yg
u
Il vient, en explicitant dans le cas mécanique (Q = mv0 /a, u = v/v0 et mv20 = K ) :
Z m = a + j mv −
K
v
On en déduit le module et la phase :
Z m = |Zm| exp(jw)
avec
|Z m | = a2 + mv −
K
v
et
w = f e − fv
tel que
tan w =
mv − K /v
a
2 1/2
185
Oscillations forcées. Résonance
b) Impédance électrique du dipôle RLC
On appelle impédance électrique du dipôle RLC le rapport entre l’amplitude complexe u m de la
tension excitatrice et celle im de l’intensité du courant :
Ze =
1
um
L
= R 1 + jQ u −
=
im
Yg
u
Il vient, en explicitant dans le cas électrique (Q = Lv0 /R, u = v/v0 et Lv20 = 1/C) :
Ze = R + j Lv −
1
Cv
On en déduit le module et la phase :
Ze = |Ze| exp(jw)
1
|Z e | = R + Lv −
Cv
2
avec
2 1/2
et
w = fe − fi tel que
tan w =
Lv − 1/(Cv)
R
Évidemment |Z m | ou |Ze | passent par un minimum pour v = v0, quel que soit l’amortissement.
À la résonance, l’impédance que présente l’oscillateur au milieu excitateur est minimale.
Sur la figure 11.6, on a représenté Z m et Ze dans le plan complexe ; cette dernière construction est
traditionnellement appelée la représentation de Fresnel de l’impédance électrique.
Remarque : Une convention internationale recommande de désigner par la lettre w la différence de
phase f u − fi entre la phase de la tension et celle de l’intensité.
c Dunod – Toute reproduction non autorisée est un délit
K=!
1=C!
m!
|Z m|
'
®
L!
|Ze|
'
R
a)
b)
F IG . 11.6.
III . 2 . — Vitesse ou intensité au voisinage de la résonance
L’amplitude de la vitesse s’écrit, en fonction de u et Q :
vm =
Fm/a
1 + Q 2 (u − 1/u)2
1/2
Pour u = 1, vm est maximal et vaut Fm/a (Fig. 11.7a). Ainsi, comme l’admittance généralisée, l’amplitude de la vitesse passe par un maximum pour v = v0 , quel que soit l’amortissement et donc Q.
Il en résulte qu’un moyen d’analyser le phénomène de résonance est d’étudier la variation de la vitesse du système considéré en fonction de la pulsation v : on dit qu’il y a résonance de vitesse.
186
11. Oscillations forcées. Résonance
Fm
®1
vm
Áv − Áe = −'
¼
2
Q1
Fm
®2
0
Q2 < Q1
1
0
u=
−
!
!0
1
u=
¼
2
!
!0
b)
a)
F IG . 11.7.
Cette variation de la vitesse en fonction de la fréquence peut être mise en évidence dans l’expérience initiale faite avec le pendule élastique. Il suffit d’utiliser un circuit dérivateur qui permet d’avoir
la dérivée par rapport au temps du signal électrique proportionnel à l’élongation. On constate bien que
l’amplitude de la vitesse est maximale pour v = v0 , quel que soit l’amortissement.
Quant à la différence entre la phase de la vitesse et celle de la force excitatrice, on l’obtient directement à partir de w puisque :
fv − fe = −w
Il en résulte que la vitesse et la force excitatrice sont en phase à la résonance. Lorsque u varie de 0
jusqu’à l’infini, la différence de phase passe de p/2 à −p/2 (Fig. 11.7b). Si l’amortissement est nul,
l’amplitude de la vitesse est infinie ; la phase, elle, vaut p/2 pour v < v0 et −p/2 pour v > v0 .
Ces résultats sur la vitesse se transposent directement à l’intensité dans le circuit série RLC excité
par un générateur de tension sinusoïdale. On obtient alors la résonance d’intensité.
Remarque : Du point de vue de la théorie du filtrage fréquentiel d’une excitation par un système, on
peut dire que l’oscillateur apparaît comme un filtre passe bande, puisqu’il transmet avec
une efficacité maximale l’excitation, si celle-ci a une pulsation égale à sa pulsation propre.
III . 3 . — Élongation au voisinage de la résonance
L’amplitude réelle x m de l’élongation s’écrit, en fonction de u et Q :
xm =
Qem /v20
u [1
+ Q 2(u
− 1/u) 2] 1/2
=
QFm /K
[u 2
+ Q2(u 2 − 1)2]1/2
Pour étudier la variation de xm, étudions la fonction suivante ayant la signification d’un facteur de
transmission |H(u)| :
1
Kxm
|H(u)| =
= 2
2
QF m
[u + Q (u2 − 1)2]1/2
Il vient, en dérivant :
1 1/2
2Q 2
√
Ainsi, l’amplitude réelle xm vaut Fm /K si u = 0 et s’annule à l’infini ; si Q > 1/ 2, ce qui
est souvent le cas, xm passe par un maximum pour u = um, On dit parfois qu’il y a résonance en
d |H (u)|
1 + 2Q 2(u 2 − 1)
=0
= −u 2
du
[u + Q2 (u2 − 1)2 ]3/2
pour
u = 0 et u = um = 1 −
187
Oscillations forcées. Résonance
élongation, mais notons que ce maximum est obtenu pour une pulsation v m inférieure à la pulsation
amortie va et à la pulsation propre v 0 :
vm < va < v0
avec
vm = v 0 1 −
1
2Q 2
1/2
et va = v0 1 −
1/2
1
4Q2
Cependant um ≈ 1 si Q 1 (Fig. 11.8a). L’amplitude de l’élongation vaut alors x m ≈ QF m /K .
On met en évidence expérimentalement ce maximum à l’aide du montage de la figure 11.1 : en faisant
varier la vitesse de rotation du moteur, on observe aisément, pour un amortissement faible, la forte
augmentation de xm .
Remarque : Évidemment, dans le cas limite où il n’y a pas d’amortissement, l’amplitude xm de l’élongation devient infinie pour v = v0 .
xm
QFm
K
Á x − Áe = −' −
Q 1 = 100
0
Q2 = 5
Fm
K
−
Q3 = 0;2
0
1
u=
¼
2
u=
1
!
!0
¼
2
−¼
!
!0
a)
b)
F IG . 11.8.
En ce qui concerne la différence de phase f x − f e, on l’obtient immédiatement en retranchant
p/2 à la différence de phase f v − f e :
c Dunod – Toute reproduction non autorisée est un délit
fx − fe = f v − fe −
p
p
= −w −
2
2
Elle varie donc entre 0 et −p lorsque u passe de 0 à l’infini. Ainsi, l’élongation de l’oscillateur est
toujours en retard sur l’excitateur et ce retard vaut p/2 à la résonance (Fig. 11.8b). Si l’amortissement
est nul, le maximum est infini et se produit pour v = v0 ; la phase vaut alors 0 si v < v 0 et p si
v > v0 .
Les résultats relatifs à l’élongation se transposent aisément à la tension aux bornes du condensateur
dans le circuit série RLC.
Remarque : (1) Notons que, contrairement à l’admittance et à l’amplitude de√la vitesse, l’amplitude
de l’élongation x m ne passe par un maximum que si Q > 1/ 2 et, qu’en outre, ce
maximum, lorsqu’il existe, ne se produit pas rigoureusement pour v = v 0 .
(2) Ici aussi, du point de vue de la théorie du filtrage fréquentiel d’une excitation par un
système, l’oscillateur apparaît comme un filtre passe bande. Cependant, dans le cas de
l’élongation, le filtrage
√ peut être moins efficace si l’amortissement est trop important ; par
exemple, si Q < 1/ 2, il n’y a pas de maximum dans le voisinage de la pulsation propre.
188
11. Oscillations forcées. Résonance
III . 4 . — Étude énergétique
a) Puissance mécanique fournie par l’excitateur à l’oscillateur
La puissance fournie par l’excitateur à l’oscillateur, par l’intermédiaire du terme F m cos(vt + f e),
a pour expression :
P = F · v = F m cos(vt + fe ) vm cos(vt + f v) =
F2m
[cos(2vt + fe + f v) + cos w]
2|Zm |
puisque vm = F m/|Zm |. La puissance évolue donc sinusoïdalement autour de la valeur moyenne P
suivante :
v2
F2
F2
P = m cos w soit P = a m 2 = a m
2|Zm |
2|Zm |
2
d’après la relation cos w = a/|Zm | , que l’on établit aisément à l’aide de la représentation de Fresnel de
l’impédance. En remplaçant vm par son expression, on trouve :
P=
F2m
1
a
v2F 2m
=
2
2
2
2
2
2
2
2m (v0 − v ) + v /te
2a 1 + Q (u − 1/u)2
Cette puissance moyenne fournie par l’excitateur sert à compenser la puissance perdue par frottement ;
en effet, calculons la moyenne de la puissance de la force de frottement :
v2m
2
Ce résultat rappelle le rôle dissipatif bien connu joué par un résistor dans un circuit électrique :
P f = −av · v = −a ẋ2 = −a vm2 cos 2(vt + fv )
Pf = −R
d’où
Pf = −a
i2m
= −R I 2
2
√
en introduisant l’intensité efficace I = im/ 2. Le signe moins exprime que cette puissance est perdue
par le système.
b) Variation de la puissance mécanique fournie par l’excitateur en fonction de la pulsation
Étudions, en fonction de u = v/v 0 , l’expression de la puissance moyenne P transférée par la
force excitatrice à l’oscillateur. Cette puissance s’annule pour les valeurs extrêmes de u et passe par un
maximum pour u = 1 (Fig. 11.9a) :
P=
P max
1 + Q2 (u − 1/u)
2
avec
P max =
F 2m
2a
Si l’on représente cette puissance moyenne en fonction, non de u, mais de U = ln u, on obtient une
courbe symétrique (Fig. 11.9b) d’équation :
P=
P max
2
1 + Q2 [exp U − exp(−U)]
=
Pmax
1 + 4Q 2 sinh 2 U
On voit que le transfert maximal de la puissance moyenne de l’excitateur vers l’oscillateur est
maximal à la résonance. C’est la raison pour laquelle, en physique moderne, où l’aspect énergétique
s’exprime plus simplement, on définit souvent la résonance par le transfert maximal d’énergie moyenne
entre l’excitateur et l’oscillateur.
189
Oscillations forcées. Résonance
P
Pm
P
Pm
Q2 > Q1
Q1
0
1
u=
a)
!
!0
0
U = ln
!
!0
b)
F IG . 11.9.
Remarque : Pour observer, dans le montage initial (Fig. 11.1), le pic de puissance transférée en
moyenne à l’oscillateur, une méthode consiste à dériver, à l’aide d’un dérivateur électronique, le signal électrique détecté qui est proportionnel à l’élongation, ensuite à le multiplier par cette dérivée à l’aide d’un multiplieur, et enfin à filtrer le produit en ne laissant
passer que la composante continue.
III . 5 . — Effets de non-linéarités sur la résonance
On obtient une équation différentielle typique d’un oscillateur non linéaire en régime forcé en
ajoutant un terme d’excitation sinusoïdale à une équation différentielle non linéaire, par exemple :
ẋ
ẍ + + v20 x(1 − bx2) = e m cos(vt + fe)
te
b étant un coefficient positif. L’amplitude X m varie, comme le montre la figure 11.10, en fonction du
rapport u = v/v 0. Pour te suffisamment faible (a fort), la courbe x m(u) ressemble aux courbes
correspondantes dans le cas linéaire (Fig. 11.10). En revanche, si t e est fort (a faible), la courbe se
déforme au point que trois valeurs de l’amplitude peuvent correspondre à une valeur déterminée de la
pulsation. Une telle équation différentielle permet d’expliquer l’instabilité d’oscillations moléculaires
anharmoniques.
c Dunod – Toute reproduction non autorisée est un délit
xm
te fort
te faible
0
u =
!
!0
F IG . 11.10.
IV . — APPLICATIONS
Les applications pratiques de la résonance sont nombreuses en mécanique et en électricité : soit
on souhaite amplifier la réponse que donne un oscillateur à une excitation extérieure et on se place à la
résonance ou dans son voisinage, soit, au contraire, on veut étouffer cette réponse et on s’en éloigne. En
mécanique, on l’utilise surtout dans le second cas, alors qu’en électricité l’application principale relève
du premier : on sélectionne un signal électrique parmi d’autres à l’aide d’un circuit résonnant de grand
facteur de qualité.
190
11. Oscillations forcées. Résonance
IV . 1 . — Réponse des sismographes
Supposons pour simplifier que le facteur de qualité d’un sismographe soit suffisamment grand, ce
qui est généralement le cas. L’équation différentielle établie en section I peut être réduite à :
Ẍ + v20 X = d mv 2 cos(vt + fe )
La recherche d’une solution de la forme X = Xm cos(vt + fx ) donne :
(−v 2 + v20 )Xm cos(vt + f x) = d mv2 cos(vt + fe )
Il en résulte, en introduisant u = v/v0 :
u2
= dm
1 − u2
avec fx − fe = 0 pour u < 1 et fx − fe = p pour u > 1.
Sur la figure 11.11a, on a représenté le graphe X m(u) : il part de la valeur 0, passe par un maximum et tend vers une valeur asymptotique égale à l’amplitude de l’excitation. La valeur infinie de ce
maximum est due au modèle simplifié choisi, pour lequel on a négligé la force de frottement visqueux.
Ainsi, pour u 1, X m ≈ dm : l’amplitude Xm est égale à celle de l’excitation. Le système
restitue donc les vibrations excitatrices, ce qui est précieux en sismographie. Il en résulte que v 0 v
soit T0 T. On est alors limité par la réalisation de pendules de périodes propres longues.
X m
Xm
Véhicule
dm
0
1
O
!
u=
!0
Route
O Axe galiléen
b)
a)
F IG . 11.11.
IV . 2 . — Amortissement des vibrations excitatrices. Accéléromètre
Dans l’étude précédente, l’autre cas extrême u 1 présente aussi un intérêt, car l’amplitude X m
est alors beaucoup plus faible que l’amplitude de l’excitation :
X m ≈ d m u2 d m
Le système amortit donc les vibrations excitatrices. Ce résultat est utilisé dans les véhicules destinés à
transporter des passagers. Ces véhicules peuvent être assimilés à des oscillateurs élastiques dont l’extrémité basse, en contact avec la route ou le rail, est soumise à un déplacement fonction du temps
(Fig. 11.11b). Comme on souhaite éviter que les passagers, situés sur l’extrémité haute, soient incommodés par les oscillations verticales imposées par la route, on se place dans la situation où u 1.
Notons que X m est proportionnelle à l’accélération de translation du repère R = O xyz par
rapport à R :
v2
aS
Xm ≈ dm 2 = 2
v0
v0
191
Oscillations forcées. Résonance
aS étant la norme de l’accélération de R en translation par rapport à R. Ainsi, lorsque u 1,
l’oscillateur peut être utilisé comme un accéléromètre, puisque la mesure de Xm permet d’accéder à
l’accélération de R .
IV . 3 . — Diffusion
La diffusion d’un rayonnement incident par un électron atomique constitue un exemple physique
important d’application des oscillations forcées d’un oscillateur par une excitation.
a) Modèle
Une telle diffusion est interprétée classiquement à l’aide du modèle de l’électron élastiquement
lié . On montre que la puissance moyenne diffusée est proportionnelle au carré de l’accélération de la
particule et donc à la quantité :
4
v x2m = u4
Q 2Fm2 /m2
e2E2m
u4
=
u2 + Q 2(u2 − 1)2
m 2 (u2 − 1)2 + u2 /Q2
b) Différents types de diffusion
Représentons le graphe de la fonction D(u) caractérisant la diffusion (Fig. 11.12a) :
D(u) =
D(u)
Diffusion résonnante
u4
(u 2 − 1)2 + u2/Q 2
Lentille de projection
Soufre colloïdal
Condenseur
Diffusion Thomson
1
Source
de lumière
blanche
Diffusion Rayleigh
Diaphragmeobjet
Rayonnement
bleuté
u
1
a)
Rayonnement
rougi
b)
c Dunod – Toute reproduction non autorisée est un délit
F IG . 11.12.
Trois domaines sont généralement considérés :
i) Diffusion Rayleigh (u 1) . Lorsque u 1 :
D(u) ≈ u4 =
v
v0
4
=
Cte
l4
où l désigne la longueur d’onde du rayonnement excitateur. Ainsi, dans ce cas, la puissance diffusée varie comme 1/l4 . C’est cette diffusion, étudiée par le physicien anglais J. Rayleigh, qui permet
d’interpréter la couleur bleue du ciel.
On peut mettre en évidence la diffusion Rayleigh à l’aide du montage représenté sur la figure
11.12b. On interpose sur le trajet de lumière blanche, entre un diaphragme circulaire et son image dans
un plan d’observation, une cuve contenant une solution de thiosulfate de sodium (2Na +, S 2 O 2−
3 ).
En ajoutant de l’acide chlorhydrique (HCl) à la solution, on provoque la formation de soufre colloïdal,
ce qui augmente l’intensité de la diffusion et donc le rayonnement bleuté observé dans une direction
perpendiculaire à la direction moyenne du faisceau lumineux. En même temps, le faisceau transmis
devient rouge sur l’écran. On réalise la même expérience en versant du lait dans de l’eau.
192
11. Oscillations forcées. Résonance
ii) Diffusion de Rayleigh résonnante (u ≈ 1) . Comme dans ce cas u 2 − 1 ≈ 2(u − 1), D(u)
s’écrit :
1
D(u) ≈
4(u − 1) 2 + 1/Q2
iii) Diffusion Thomson (u 1) . Lorsque u 1, la fonction de diffusion est indépendante de
u : D(u) ≈ 1. C’est ce que l’on observe avec des rayons X durs, pour lesquels u 1 : la puissance
diffusée est indépendante de la fréquence.
IV . 4 . — Cas d’une excitation quelconque. Filtrage mécanique
Si l’excitation (déplacement ou force) n’est pas une fonction sinusoïdale du temps mais une fonction quelconque, l’analyse est menée en remplaçant cette dernière fonction par son développement de
Fourier (cf. Optique). Comme le système est linéaire, on cherche la réponse que donne l’oscillateur aux
différents termes du développement, puis on recompose les différentes réponses obtenues avec leurs
coefficients respectifs.
Notons que l’amplitude de chaque composante de Fourier dépend alors de la pulsation. Par
exemple, dans le cas d’une force d’excitation, d’expression complexe :
t
exp(jv0 t) ex
F = F0 exp −
t
l’analyse de Fourier montre que F est la somme de termes sinusoïdaux d’expression :
t0
Fm (v) exp(jvt) ex avec Fm (v) = F0
1 + j(v − v0)t
Les résultats établis dans la section III devront être totalement reconsidérés en raison de l’influence de
la pulsation dans l’amplitude complexe de la force.
CONCLUSION
Retenons les points essentiels.
(1) Lorsqu’une excitation sinusoïdale agit sur un oscillateur, l’équation canonique caractéristique
est la suivante :
ẋ
ẍ +
+ v20x = e m (v) cos(vt + fe )
te
(2) L’excitation impose sa fréquence v en raison des forces de frottement. Pour déterminer l’amplitude et la phase de l’oscillateur, il suffit de chercher une solution particulière de cette équation, sinusoïdale et de même pulsation que celle de l’excitation.
(3) Si la pulsation de l’excitateur est égale à celle de l’oscillateur, on constate que le module de
l’admittance complexe généralisée du système, définie comme le rapport de l’amplitude complexe de la
réponse en vitesse sur celle de l’excitation, est maximal :
te
te
d’où |Y g| =
Yg =
2
1 + jQ(u − 1/u)
[1 + Q (u − 1/u) 2]1/2
C’est la résonance.
(4) La différence de phase entre la réponse en vitesse x˙ de l’oscillateur et l’excitation est :
1
fv − fe = −w avec tan w = Q u −
u
À la résonance, vitesse et excitation sont en phase.
La différence de phase entre la réponse en élongation x de l’oscillateur et l’excitation s’en déduit :
p
p
fx − fe = f v − fe − = −w −
2
2
À la résonance, l’élongation est en retard de p/2 sur l’excitation.
193
Oscillations forcées. Résonance
(5) Dans le cas où l’amplitude de l’excitation est indépendante de la pulsation, on observe à la
résonance :
i) une amplitude de la vitesse maximale,
ii) une puissance moyenne transférée de l’excitateur vers l’oscillateur qui est maximale,
iii) une amplitude de l’élongation√proche de sa valeur maximale, laquelle n’existe que pour des
systèmes peu amortis (Q > 1/ 2 ).
L’analogie entre les systèmes mécaniques et les circuits électriques est évidente : on définit, en
régime sinusoïdal forcé, une impédance complexe analogue à l’impédance d’un circuit RLC :
Zm = a + j mv −
K
v
et Ze = R + j Lv −
1
Cv
(6) Les oscillations forcées sont souvent utilisées, en mécanique dans la construction des sismographes, des amortisseurs et des accéléromètres, en électricité dans la réalisation de filtres passe-bande.
(7) En électromagnétisme, les oscillations forcées permettent d’expliquer classiquement la diffusion de la lumière par les électrons atomiques, selon le modèle de l’électron élastiquement lié.
(8) La résonance peut être soit un inconvénient (on peut provoquer la rupture d’un appareil), soit un
avantage lorsqu’on veut augmenter la sensibilité du système ; c’est le cas dans la réception des signaux
hertziens (cf. Électronique).
Par extension, le mot résonance est souvent employé lorsqu’un système excité admet une grandeur
en sortie qui passe par un maximum pour une valeur déterminée d’un paramètre dont dépend l’excitation.
EXERCICES ET PROBLÈMES
P11– 1. Pendule élastique horizontal soumis à l’action d’une force sinusoïdale
c Dunod – Toute reproduction non autorisée est un délit
Un pendule élastique est constitué d’une masselotte de masse 100 g, reliée à un ressort de raideur
16 N . m−1. La masselotte coulisse sans frottement solide sur une tige horizontale fixe dans le référentiel du laboratoire R. L’expérience montre que le mouvement est amorti par frottement visqueux : le
décrément logarithmique L vaut 0, 05. On impose à l’autre extrémité S du ressort un mouvement
sinusoïdal dont la fréquence est variable.
1. Établir l’équation différentielle du mouvement de la masselotte.
2. Calculer la durée de relaxation en énergie te et le facteur de qualité Q.
3. Pour quelle valeur de la fréquence excitatrice l’amplitude de la vitesse est-elle maximale ?
Calculer alors l’impédance de l’oscillateur.
P11– 2. Oscillations forcées d’une particule chargée dans un champ électrique sinusoïdal
Une particule de charge électrique q, de masse m, liée élastiquement à un point fixe O, oscille
harmoniquement sur un axe Ox, avec la pulsation v 0. Elle est soumise à l’action d’un champ électrique
sinusoïdal E dirigé suivant Ox et d’expression E = E0 cos(vt) e x.
1. Écrire l’équation différentielle du mouvement de la charge.
2. Trouver la solution de cette équation sachant qu’à l’instant t = 0, x = 0 et ẋ = 0.
3. Quelle est la nature du mouvement lorsque v est voisin de v 0 ? Donner alors l’expression de
l’énergie E de l’oscillateur.
194
11. Oscillations forcées. Résonance
P11– 3. Pendule élastique sur une tige en mouvement horizontal
Une masselotte A, de masse m, ayant la forme d’un anneau, coulisse le long d’une tige horizontale Tx avec un frottement solide négligeable. Un ressort de raideur K placé autour de la tige est fixé
aux extrémités en T et A. On donne à la tige un mouvement sinusoïdal rectiligne, de pulsation v et
d’amplitude d m (Fig. 11.13). On admet qu’une force supplémentaire de frottement visqueux, proportionnelle à la vitesse de la masselotte par rapport à la tige et caractérisée par une durée de relaxation en
énergie te , s’exerce sur A. En outre, on se place dans le cas où Q = v0t e 1/2.
1. Établir l’équation différentielle du mouvement de l’anneau par rapport à la tige.
2. Trouver l’amplitude du mouvement forcé de l’anneau par rapport à la tige.
3. On définit la bande passante de ce système par Dv = v 2 − v 1 , v1 et v 2 étant les pulsations pour lesquelles l’amplitude
des oscillations de la masselotte par rapport à la tige est l’amplitude
√
maximale divisée par 2. Calculer le produit Dvt e .
K
O T
A
x
F IG . 11.13.
P11– 4. Isolement de vibration
On se propose d’étudier les vibrations que transmet une machine tournante au support horizontal
sur lequel elle repose. On peut représenter cette machine par une masse M placée sur un ressort, de
raideur K, muni d’un amortisseur et soumise à une force sinusoïdale F = mv2r cos(Vt) ex , r étant une
longueur constante et m une quantité homogène à une masse. On désigne par x et xS respectivement
les coordonnées de la masse M et du support suivant la verticale dans le référentiel du laboratoire ; les
origines de x et x S sont prises en leurs positions de repos.
1. Établir l’équation différentielle du mouvement à laquelle satisfait x.
2. On s’intéresse au mouvement forcé mais on néglige, dans les calculs, l’influence de l’amortissement. Sachant que l’amplitude de mouvement du support est négligeable devant celle de la masse
M, trouver le facteur d’amplification de la force transmise au support par rapport à la force sinusoïdale. À quelle condition ce rapport est-il égal à 0, 001 ?
P11– 5. Force sinusoïdale sur un oscillateur harmonique de pulsation différente
Étudier le mouvement d’un pendule élastique (masse m = 2 kg, fréquence propre f 0 = 4 Hz),
lorsqu’on exerce sur lui une force sinusoïdale, d’amplitude 80 N et de fréquence f = 6 Hz. Initialement, le degré de liberté de l’oscillateur ainsi que sa dérivée par rappport au temps sont nuls ; en outre,
la force a sa valeur maximale.
P11– 6. Force sinusoïdale sur un oscillateur harmonique de même pulsation
On suspend à l’extrémité inférieure d’un ressort vertical (raideur 48 N . m −1 ) une masselotte A,
de masse 3 kg, et on lui applique une force sinusoïdale d’expression, en newton : 36 cos(4t).
1. Sachant que les termes d’amortissement sont négligeables, établir l’équation différentielle du
mouvement.
2. Chercher une solution du mouvement de la forme : x = t [A cos(4t) + B sin(4t)]
3. En déduire la nature du mouvement sachant qu’initialement x = 0 et ẋ = 0. Tracer le
graphe x(t).
195
Oscillations forcées. Résonance
P11– 7. Diffusion de la lumière
Les électrons (masse m e , charge −e) des couches périphériques des différents atomes qui composent l’air peuvent être considérés comme des oscillateurs harmoniques dont la pulsation propre correspond à une radiation ultraviolette du spectre électromagnétique. On excite de tels oscillateurs en envoyant une onde lumineuse caractérisée par le champ électrique de la forme E 0 cos(vt).
1. Écrire l’équation du mouvement de ces oscillateurs. On posera K = m e v20 et t e = me /a, a
étant le coefficient de frottement proportionnel à la vitesse.
2. Trouver l’expression du module du facteur d’amplification H = Kx m/(eE0) en fonction de
u = v/v0 et du facteur de qualité Q.
3. Sachant que Q = 10 et que u varie dans le voisinage de 0, 2, montrer que H est sensiblement
indépendante de la pulsation v.
4. La puissance émise par ces oscillateurs excités est proportionnelle au carré de l’amplitude de
l’accélération des électrons. Comment varie-t-elle avec v ? En déduire une interprétation de la couleur
bleue du ciel.
P11– 8. Capteur de vibration
Un ensemble comprend un support rigide et une masselotte A reliés par un ressort vertical et un
amortisseur visqueux en parallèle. On l’utilise pour capter les vibrations d’une machine sur laquelle il
repose (Fig. 11.14). La masselotte a une masse m = 0, 2 kg et le ressort une raideur K = 20 N . m −1 ;
en outre, le coefficient d’amortissement de Stokes est égal à la moitié de sa valeur critique.
O
y
O
Support
K
x
A
c Dunod – Toute reproduction non autorisée est un délit
Machine
F IG . 11.14.
1. Trouver les caractéristiques v 0 et t e de cet oscillateur. En déduire le facteur de qualité Q.
2. La machine, avec laquelle le capteur est en contact a un mouvement sinusoïdal vertical de pulsation v et d’amplitude dm. Établir l’équation différentielle à laquelle satisfait le mouvement de la
masselotte A par rapport au capteur. On désignera par X la coordonnée de position de A par rapport à sa position d’équilibre dans le référentiel R lié au support du capteur.
3. Trouver l’expression de l’amplitude complexe de l’élongation X en fonction de u = v/v0 et
de Q. En déduire l’amplitude réelle Xm et sa phase f x par rapport à la phase du déplacement de la
machine. Représenter le graphe Xm(u). Quelle est la valeur du rapport X m/d m pour u = 10 ?
4. Comment varient, en fonction de u, l’amplitude réelle de la vitesse Ẋ et sa phase f v ?
196
11. Oscillations forcées. Résonance
P11– 9. Pendule simple excité par des oscillations horizontales
Un pendule simple est constitué d’une masselotte A qui glisse, sans frottement, le long d’un guide
circulaire de rayon l = 40 cm . Ce dernier, de centre I , est astreint à un mouvement sinusoïdal, d’amplitude hm et de pulsation v , suivant la direction horizontale Oy : y I = hm sin(vt) (Fig. 11.15). On
désigne par u l’angle que fait le vecteur IA avec la verticale descendante Ox ; on prendra pour valeur du champ de pesanteur terrestre g = 9, 80 m.s−2 .
1. En appliquant le théorème du moment cinétique au point I , mobile dans le référentiel R
d’étude, montrer que l’équation différentielle du mouvement en u s’écrit :
ẏI
ÿI
ü − 2 u̇ sin u + cos u = −v 20 sin u
l
l
dans laquelle v0 est une grandeur dont on donnera la signification physique et que l’on calculera.
2. Que devient l’équation précédente pour de petits mouvements ? L’équation obtenue rappelle
celle caractéristique d’un phénomène physique important. Lequel ?
3. Sachant qu’initialement le pendule est au repos (u = 0 et u̇ = 0) , trouver la solution u(t) .
Quelle est la nature générale du mouvement ?
4. Analyser et commenter les deux cas suivants.
a) v/v0 1 . Calculer le facteur d’amplification en amplitude pour la fréquence f = 0, 01 Hz .
b) v/v 0 1 . Calculer le facteur d’amplification en amplitude pour la fréquence f = 100 Hz .
g
O
I
y
l
R
µ
x
F IG . 11.15.
A
12
Corps ponctuel soumis à une
force centrale conservative
Le mouvement d’un corps ponctuel A soumis à une force centrale est celui pour lequel la force
passe constamment par un centre O fixe dans le référentiel R considéré. Si cette force F dérive d’une
énergie potentielle Ep , cette dernière ne dépend que de la norme r du vecteur r = OA ; en effet, e r
étant le vecteur unitaire r/r :
dE
F = − grad E p(r) = − p er
dr
L’intérêt de l’étude de ce mouvement est lié au problème à deux corps (cf. chapitre 13), lequel est
d’une importance considérable puisque l’étude concerne toutes les interactions fondamentales gravitationnelle, électromagnétique, forte, faible.
c Dunod – Toute reproduction non autorisée est un délit
Avant d’étudier le cas particulier du problème de Kepler, où E p = K /r avec K < 0, nous devons
rappeler les principaux résultats des mouvements à force centrale conservative (cf. chapitres 4 et 5).
I . — MOUVEMENTS À FORCE CENTRALE CONSERVATIVE
I . 1 . — Conservation du moment cinétique
La force étant centrale, son moment au centre O est nul. Le moment cinétique en O du corpuscule
A, de masse m, par rapport au référentiel galiléen R, est donc un vecteur constant L :
LO = OA × mv A = Cte = L
Comme OA et vA doivent être constamment perpendiculaires à L, la trajectoire de A est contenue
dans le plan perpendiculaire à L passant par O :
OA · L = 0
vA · L = 0
Ainsi, le mouvement d’un corps ponctuel soumis à une force centrale est plan.
198
12. Corps ponctuel soumis à une force centrale conservative
Dans la suite, nous choisirons l’axe Oz du référentiel R suivant L et nous appellerons Oxy le
plan dans lequel s’effectue le mouvement. En coordonnées polaires, L s’écrit :
L = re r × m( ṙ er + rw˙ ew ) = mr2 ẇ ez
Donc :
L = Lz ez = Cte
Lz = mr2 ẇ = Cte
avec
Remarquons que ẇ a le signe de Lz et le garde constamment. En outre : L2z = L2.
Pour des raisons historiques, on exprime parfois la conservation du moment cinétique à l’aide de
la constante des aires C = r2ẇ, qui n’est autre que le moment cinétique par unité de masse, ou à l’aide
de la vitesse aréolaire a = d A/ d t , qui est la vitesse avec laquelle le rayon vecteur balaie l’aire du
plan Oxy (Fig. 12.1a) :
C = r 2ẇ =
Lz
m
et
a
=
dA
1
=
dt
dt
r ×rdw
Lz
C
=
=
2
2m
2
Sur la figure 12.1b, on a représenté les aires égales balayées pendant des durées égales ; on voit que la
vitesse au point B est plus faible qu’en A qui est plus proche du centre attractif O.
z
y
L
A
y
O
dw
w
A
A
a)
B
x
Oz
A
x
B
b)
F IG . 12.1.
I . 2 . — Conservation de l’énergie
Exprimons, en coordonnées polaires, la conservation de l’énergie mécanique de ce corps ponctuel
soumis à une force qui dérive de l’énergie potentielle Ep (r) :
Em = Ek + Ep(r) = Cte
donne
1
m(ṙ 2 + r 2 ẇ2 ) + Ep (r) = Em
2
soit, en introduisant le carré de la norme du moment cinétique L2 = m2r 4ẇ 2 et l’énergie potentielle
effective :
L2
1 2
m ṙ + Ep,ef (r) = E m avec E p,ef (r) = Ep(r) +
2
2mr 2
199
Corps ponctuel soumis à une force centrale conservative
I . 3 . — Équation de la trajectoire
D’après ce qui précède, on peut déduire, au moins en principe, la relation entre w et r. En effet :
dw
Lz
ẇ
= =
ṙ
dr
r2 [2m(E m − Ep,ef )]1/2
La trajectoire peut donc être obtenue en calculant l’intégrale :
w=
Lz d r
+ w0
r 2[2m(Em − E p,ef )]1/2
dans laquelle on a remplacé E p,ef par son expression.
La trajectoire n’est pas nécessairement fermée ; on montre qu’elle peut l’être uniquement dans les
deux cas importants suivants :
i) L’énergie potentielle est de la forme E p = K /r ; c’est le problème de Kepler si K < 0 que nous
étudierons de façon détaillée dans la suite.
ii) L’énergie potentielle est quadratique Ep = Kr2/2 ; c’est l’oscillateur bidimensionnel si K > 0
(cf. Exercices).
Aussi est-il intéressant, avant d’effectuer le calcul, de discuter qualitativement le mouvement à
partir du graphe donnant l’énergie potentielle effective Ep,ef en fonction de r. On peut alors en déduire
la nature de l’état, lié ou libre, du corps ponctuel, selon les valeurs de son énergie.
II . — PROBLÈME DE KEPLER
On désigne par problème de Kepler (du nom de l’astronome allemand J. Kepler) le cas où la force
centrale est newtonienne (ou coulombienne), c’est-à-dire de la forme K /r 2, K étant positif ou négatif
suivant qu’elle est répulsive ou attractive.
II . 1 . — Expression de l’énergie potentielle
La force s’écrivant : F = (K /r 2 ) er , on trouve l’expression de l’énergie potentielle associée à F
en exprimant le travail élémentaire dW :
c Dunod – Toute reproduction non autorisée est un délit
dW = F · d r =
K
K
K
e
·
d
r
=
d
r
=
−
d
r
r2
r2
r
= − d E p avec
Ep =
K
r
si l’on adopte comme origine de l’énergie potentielle celle pour r infini. Dans la suite, on écrira :
K = ε|K | avec ε = sgn(K ) = 1 dans le cas répulsif et ε = sgn(K ) = −1 dans le cas attractif, la
fonction sgn(x) représentant le signe de x.
II . 2 . — Discussion qualitative du mouvement
L’énergie potentielle effective a pour expression :
E p,ef (r) =
K
L2
+
2mr2
r
Sur la figure 12.2, on a représenté le graphe Ep,ef (r) dans le cas répulsif (K > 0) et dans le cas attractif
(K < 0). On voit que, si la force est répulsive (a), les états possibles sont tous libres, alors que, si la
force est attractive (b), les états peuvent être libres ou liés suivant que l’énergie mécanique est positive
ou négative.
200
12. Corps ponctuel soumis à une force centrale conservative
Énergies
Énergies
Em
L2
2mr 2
Cas répulsif (K > 0 )
E p,ef
Em
K=r
Cas attractif (K < 0 )
E p,ef
0
Em
L2
2mr 2
0
r
K=r
r
a)
b)
F IG . 12.2.
II . 3 . — Loi de conservation caractéristique du problème de Kepler
Il existe une troisième loi de conservation, de nature vectorielle, caractéristique du problème de
Kepler.
a) Troisième loi de conservation
D’après la loi fondamentale, on sait que :
m
dv
K
= 2er
dt
r
ce qui s’écrit aussi
dv
K d ew
K d ew
=− 2
=− 2
dt
mr d w
mr ẇ d t
puisque er = − d ew / d w. En introduisant le moment cinétique en O, L = L ze z, on obtient :
dv
K d ew
=−
dt
Lz d t
d’où en intégrant
v=−
K
ew + w
Lz
w étant un vecteur constant homogène à une vitesse. Ainsi :
w=v+
K
ew = Cte
Lz
homogène à une vitesse, est une constante vectorielle du mouvement.
b) Vecteur de Runge-Lenz
Le vecteur de Runge-Lenz, du nom des physiciens allemands Runge et Lenz, en raison de son
intérêt dans les problèmes de diffusion de particules, où l’interaction de type keplérien joue un rôle
essentiel, est le vecteur constant R , défini à partir du vecteur constant w et du moment cinétique L
en O, lui aussi constant :
R = w ×L
soit
R = v × L + Ker
car ew × L = Lz er . On voit qu’il est homogène à la constante d’interaction K .
Remarque : On introduit parfois le vecteur suivant j défini selon :
Lz
Lz
w=
v + ew
K
K
que l’on appelle vecteur excentricité car sa norme est égale à l’excentricité e d’une conique, comme nous le verrons un peu plus loin.
j=
201
Corps ponctuel soumis à une force centrale conservative
II . 4 . — Formules de Binet
Les formules établies par J. Binet donnent les expressions de la vitesse v A et de l’accélération a A
du point A en fonction des variables u = 1/r et w. En coordonnées polaires, ces vecteurs s’explicitent
respectivement selon :
r̈ − r ẇ2
ṙ
et
1 d 2
rẇ
(r ẇ) = 0
r dt
Comme :
ṙ =
dr
du
Lz d u
ẇ d u
du
ẇ = − 2
=−
u dw
m dw
dw
rẇ 2 =
L 2z u3
1 L2z u4
=
u m2
m2
L2u 2 d2 u
d dr
d
dr
d
L du
− z
= ẇ
= ẇ
=− z2
dt dt
dw dt
dw
m dw
m d w2
il vient, pour vA et a A, respectivement, puisque L 2z = L2 :
et r̈ =
du
Lz − d w
m
u
L2
− 2
m
et
d2 u
+ u u2
d w2
0
II . 5 . — Équation de la trajectoire
Il existe plusieurs méthodes pour établir l’équation de la trajectoire. Évidemment, toutes s’appuient
sur la loi fondamentale de la dynamique ou ses conséquences. La plus efficace est celle qui s’appuie sur
les équation de conservation du moment cinétique et de l’énergie mécanique.
a) Méthode par l’énergie mécanique
Comme l’énergie mécanique se conserve, il vient :
1 L2
Em = Ek + Ep = m 2
2 m
du
dw
2
+ u 2 + Ku soit
Em =
L2
2m
du
dw
2
+ u2 + Ku
c Dunod – Toute reproduction non autorisée est un délit
En dérivant par rapport à w, et en simplifiant par ẇ et d u/ d w , on trouve :
L2
0=
m
d2 u
+u +K
d w2
d’où
ε
d2 u
+u=−
2
dw
p
en introduisant ε = sgn(K ) et le paramètre suivant p, homogène à une longueur :
L2
p=
m|K |
La résolution de cette équation ne présente pas de difficulté ; la solution est la somme de la solution
générale de l’équation sans second membre et d’une solution particulière :
u = A cos(w − w0 ) −
ε
p
ce qui s’écrit aussi u =
e cos(w − w 0 ) − ε
p
202
12. Corps ponctuel soumis à une force centrale conservative
en posant e = Ap. Par conséquent :
r=
p
−ε + e cos(w − w0 )
Cette équation représente, en coordonnées polaires, une conique dont le centre O est l’un des foyers ;
p est le paramètre de la conique et e l’excentricité (cf. annexe 2).
Pour connaître la relation entre l’excentricité e et l’énergie E m , il suffit de remplacer, dans l’expression de l’énergie, u et (d u/ d w) par leurs expressions. Puisque d u/ d w = −e sin(w − w 0 )/p,
il vient :
Em =
L2
2m
du
dw
2
+ u 2 + Ku =
1
2eε
e cos(w − w 0) − ε
L 2 e2
+ 2 −
cos(w − w0 ) + K
2
2m p
p
p
p
d’où, en simplifiant :
Em = −
|K |
(1 − e 2)
2p
avec
e = 1+
1/2
2pE m
|K |
b) Méthode à partir de la loi fondamentale
L’application de la loi fondamentale de la dynamique donne, en utilisant les formules de Binet
relatives à l’accélération :
−
L2
m
d2 u
+ u u2 = Ku2
d w2
mK
εm|K |
ε
d2 u
+u=− 2 =− 2 =−
2
L
L
p
dw
d’où
On retrouve bien l’équation différentielle précédente.
c) Méthode par l’énergie potentielle effective
L’intégrale donnant w à partir de la coordonnée radiale r peut être aisément effectuée en procédant
au changement de variable suivant :
a2 =
m 2K2
+ 2mE m
L2
et
b=
mK
Lz
+
Lz
r
En effet, comme :
2m Em −
il vient :
w=
Il en résulte :
K
L2
−
r
2mr2
= a2 − b 2
Lz
1/2
r 2 {2m [Em − K /r − L 2/(2mr 2 )]}
w = arccos
ce qui s’écrit aussi :
cos(w − w 0) =
mK Lz
+
Lz
r
m2K 2
+ 2mE m
L2
1/2
=
et
db = −
dr =
−
(a2
Lz d r
r2
db
+ w0
− b2)1/2
b
+ w0
a
K
L2
+
|K |
m|K |r
2L 2E m
1+
mK 2
1/2
p
r
2pEm
1+
|K |
ε+
=
1/2
203
Corps ponctuel soumis à une force centrale conservative
en introduisant le paramètre p. On obtient donc :
p
ε + = e cos(w − w0) soit
r
r=
p
−ε + e cos(w − w0 )
Remarque : On peut retrouver l’équation de la trajectoire à l’aide du vecteur excentricité j . En effet,
en multipliant scalairement les deux membres de son équation de définition par le vecteur
unitaire ew perpendiculaire à er , on obtient :
j · ew =
Lz
v + e w · e w d’où
K
j · ew =
Lz
K
v w + 1 et vw = (ew · j − 1)
K
Lz
Comme vw = rw˙ est aussi égal à L z/(mr), on en déduit :
Lz
K
= (e w · j − 1)
mr
Lz
1
1
mK
m|K |
= 2 (ew · j − 1) = 2 (−ε + ε ew ·j) = (ε ew · j − ε)
r
L
L
p
d’où
puisque L2z = L 2. On retrouve ainsi l’expression de r :
r=
p
p
=
−ε + e w · ε j
−ε + e cos(w − w0)
où
e = |ε j|
et où (w − w0) est l’angle que fait ew avec le vecteur constant εj .
II . 6 . — Nature de la trajectoire
a) Cas répulsif (K > 0)
L’équation de la trajectoire s’écrit, puisque ε = 1 :
r=
p
−1 + e cos(w − w 0)
avec e > 1 car Em = mv2/2 + |K |/r > 0. Le dénominateur peut s’annuler ; r peut donc atteindre une
valeur infinie : la trajectoire de A est une hyperbole de foyer O (Fig. 12.3).
Hyperbole
c Dunod – Toute reproduction non autorisée est un délit
y
A
r
O
w
w0
x
F IG . 12.3.
b) Cas attractif (K < 0)
Si ε = −1, l’équation de la trajectoire en coordonnées polaires est :
r=
p
1 + e cos(w − w 0)
Comme prévu, lors de la discussion qualitative, on distingue les états libres des états liés suivant la
valeur de l’énergie.
204
12. Corps ponctuel soumis à une force centrale conservative
i) États libres pour lesquels E m 0 (e 1) ; la conique est une hyperbole (Fig. 12.4a) si Em > 0
( e > 1 ) ; c’est une parabole dans le cas limite où Em = 0 (e = 1).
ii) États liés pour lesquels E m < 0 ( e < 1) ; la conique est une ellipse (Fig. 12.4b). Dans le cas
particulier où l’énergie mécanique Em prend la valeur minimale E 0 de l’énergie potentielle effective, il
n’y a pas de mouvement radial : l’excentricité atteint sa valeur minimale e = 0 ; la trajectoire est alors
un cercle.
y
Y
y
A
Hyperbole
A
p
b
X
w0
x
c O
¡
w
O
w
Am
a
w0
x
AM
a)
b)
F IG . 12.4.
II . 7 . — Étude particulière de l’état lié
Rappelons les conditions d’un mouvement elliptique : la force doit être attractive (K < 0) et
l’énergie mécanique E m négative mais supérieure à une valeur minimale E 0 de l’énergie potentielle
effective :
1
|K |
<0
E m = mv20 −
2
r0
v0 et r0 étant respectivement la vitesse et la position initiales.
a) Caractéristiques de la trajectoire elliptique
L’équation de la trajectoire
r=
p
1 + e cos(w − w 0)
montre, sur l’ellipse de grand axe AmAM = 2a (Fig. 12.4b), que :
OAm =
p
1+e
OAM =
p
1−e
et
A mA M = 2a = OAm + OA M =
2p
1 − e2
donc
a=
p
1 − e2
La distance c = GO du centre G de l’ellipse au centre de force O, appelée distance focale, vaut :
c = a − OAm =
p
p
pe
−
=
2
1−e
1+e
1 − e2
d’où
c
=e
a
Dans le système d’axes OXY, tel que l’axe OX fait avec Ox l’angle (e x, eX ) = w0, l’équation de
l’ellipse s’écrit, X et Y étant les coordonnées cartésiennes du point A :
p = r + er cos(w − w 0) = (X2 + Y2 )1/2 + eX
puisque
X = r cos(w − w 0)
205
Corps ponctuel soumis à une force centrale conservative
On obtient, en développant :
(p − eX) 2 = X 2 + Y 2
soit
X2 +
a=
p
1 − e2
ce qui donne, puisque p = a(1 − e2) :
(X − ae)2
Y2
=1
+
a2
b2
avec
2ep
Y2
p2
X
+
=
(1 − e 2)
1 − e2
1 − e2
et
b=
p
= a(1 − e 2) 1/2
(1 − e 2 )1/2
Cette équation représente une ellipse centrée au point G, de coordonnées (c = ea, 0), dont les axes
ont pour longueurs 2a et 2b.
b) Relation entre a et Em
Comme a = p/(1 − e 2 ), il vient :
Em = −
|K |
|K |
(1 − e2 ) = −
2p
2a
Ainsi l’énergie mécanique dans les états liés ne dépend que du grand axe de l’ellipse décrite.
c) Période de révolution
La vitesse aréolaire
l’ellipse est une constante :
T=
= r2ẇ/2 étant constante, la durée mise par le point A pour parcourir
a
S
D’où :
a
=
2pabm
2pa2(1 − e 2)1/2 m
2pa3/2 m1/2
=
=
L
p1/2m 1/2|K |1/2
|K |1/2
T 2 = 4p2
m 3
a
|K |
T2
4p 2 m
=
a3
|K |
et
Le carré de la période est donc proportionnel au cube du demi-grand axe de l’ellipse.
c Dunod – Toute reproduction non autorisée est un délit
d) Variation de la vitesse sur l’ellipse
L’équation définissant l’énergie mécanique :
1
|K |
|K |
Em = mv2 −
=−
2
2a
r
donne
v2 =
|K |
m
2 1
−
r a
Donc, la vitesse est maximale au point Am le plus proche et minimale au point A M le plus éloigné.
e) Cas particulier du cercle
Si e = 0, l’ellipse se réduit à un cercle de centre O et de rayon r 0 correspondant au minimum
de l’énergie potentielle effective :
Em = −
|K |
2r0
alors que
Ep = −
|K |
r0
d’où
E m = −Ek =
Ep
2
On trouve ainsi une relation entre Em , Ep et Ek caractéristique du mouvement circulaire dans le problème de Kepler.
206
12. Corps ponctuel soumis à une force centrale conservative
Les conditions initiales jouent un rôle déterminant lorsqu’on veut mettre sur une orbite circulaire
des satellites artificiels de la Terre. Elles s’écrivent :
v0 · r0 = 0 et
mv02 |K |
= 2
r0
r0
soit
v20 =
|K |
mr0
Ainsi le vecteur vitesse initiale doit être normal au vecteur position initiale et de norme déterminée. En
revanche, ces conditions initiales n’ont pas de sens dans le mouvement des planètes autour du Soleil,
le processus de formation des planètes étant complexe. De même, elles n’ont pas de sens en physique
quantique lors de la formation d’un atome d’hydrogène à partir d’un électron placé dans le voisinage
d’un proton (cf. Quantique).
III . — LOIS DE KEPLER. VITESSE D’ÉVASION
La force attractive de gravitation qui s’exerce sur un corpuscule A , de masse m , de la part d’un
centre attractif O de masse M , a pour expression :
F=
K
Mm
e r = −G 2 er
2
r
r
avec
r = r
r = OA et er =
r
OA
=
r
r
G ≈ 6, 67 × 10−11 SI étant la constante de Newton. Ainsi K = −GMm est négatif. Suivant la valeur
de l’énergie mécanique, les états sont libres ou liés.
III . 1 . — Lois de Kepler
Ces lois, relatives au mouvement des planètes autour du Soleil, furent établies puis publiées par
Kepler, en 1609 pour les deux premières et en 1619 pour la troisième, à partir d’une série d’observations
minutieuses faites par l’astronome danois Tycho Brahé.
a) Énoncé
1 re loi : Les centres des planètes décrivent des ellipses dont l’un des foyers est occupé par le Soleil.
2e loi : Les rayons vecteurs balaient des aires égales en des durées égales.
3e loi : Les rapports des carrés des périodes de révolution sur les cubes des demi-grands axes sont
indépendants de la planète.
b) Interprétation
On assimile, au moins en première approximation, les planètes à des points matériels de masse M p ,
soumis de la part du Soleil, de masse M S et fixe dans le référentiel de Copernic, à la force de gravitation.
Ces points décrivent des ellipses dont l’un des foyers est occupé par le Soleil. C’est la première loi ; le
point Am le plus proche est le périhélie, le point A M le plus éloigné est l’aphélie.
Le moment cinétique étant constant au cours du mouvement, la vitesse aréolaire est constante, ce
que traduit la deuxième loi.
Quant à la troisième loi, elle découle directement de l’expression de la période :
4p2
T2
2 Mp
=
=
4p
a3
|K |
GMS
puisque
|K | = GM pM S
Corps ponctuel soumis à une force centrale conservative
207
Exemple : La période de révolution de Jupiter étant de 12 ans, on en déduit sa distance au Soleil
comparée à celle de la Terre :
TJ 2
aJ 3
=
d’où aJ = aT 12 2/3 ≈ 5, 2 aT
TT
aT
Ainsi, les lois de Kepler furent complètement interprétées par la loi de la gravitation universelle énoncée
par Newton.
Depuis 2006, on répertorie huit planètes dans le système solaire, qui sont, classées par valeurs
croissantes de la distance au Soleil (cf. Constantes en introduction) :
Mercure, Vénus, Terre, Mars, Jupiter, Saturne, Uranus, Neptune
Leur distance rn au Soleil, en unité astronomique (distance Terre-Soleil ST ≈ 149, 6 × 10 9 m), suit
approximativement la loi de Titus-Bode énoncée en 1772 :
rn = 0, 4 + 0, 3 × 2 n
où n = −∞ donne la distance de Mercure au Soleil, n = 0 celle de Vénus, n = 1 celle de la Terre,
etc. (Fig. 12.5).
Trajectoire
de Hale-Bopp
Uranus
Neptune
Saturne
Jupiter
S
Trajectoire
de Halley
Halley
Trajectoire
de la Terre
c Dunod – Toute reproduction non autorisée est un délit
F IG . 12.5.
Certains écarts entre les prévisions théoriques et les observations n’ont pas entamé le succès de la
théorie de Newton. Les astronomes français U. Le Verrier et britannique J. Adams attribuèrent séparément les écarts constatés sur la trajectoire de la planète Uranus à la présence perturbante d’une planète
extérieure, et ainsi « inventèrent » la planète Neptune. En 1846, Le Verrier prédit sa position, ce qui permit à l’astronome berlinois J. Galle de la découvrir dans la nuit du 23 septembre 1846 !
Au XXe siècle, on observa une avance inexpliquée du périhélie de la planète Mercure ; on tenta
d’interpréter ce désaccord par la présence d’une planète hypothétique, Vulcain, située entre le Soleil et
Mercure. Mais aucune observation ne confirma cette hypothèse ; aussi Vulcain fut-il abandonné lorsque
Einstein donna une interprétation de l’avance du périhélie de Mercure par la théorie de la relativité
générale (cf. Relativité et invariance).
c) Les comètes
Les résultats précédents concernent aussi les comètes périodiques telles que la comète de Halley, de
période 64 années, revue en 1986. Plus récemment, la comète Hale-Bopp, découverte en juillet 1995,
a été vue en mars 1997, dans la région stellaire située entre Cassiopée et Le Cygne ; sa trajectoire est
une ellipse très allongée (e = 0, 995), située dans un plan qui fait l’angle de 89, 43 ◦ avec le plan de
l’écliptique, et sa durée de révolution est 2 400 ans (Fig. 12.5).
208
12. Corps ponctuel soumis à une force centrale conservative
III . 2 . — Vitesse d’évasion, étoile noire et trou noir
a) Vitesse d’évasion
La vitesse d’évasion ou vitesse de libération est la vitesse minimale v l pour laquelle l’état de la
planète est libre ; l’orbite est alors parabolique et l’énergie mécanique nulle :
Em =
1
|K |
= 0 d’où
Mp v2l −
2
r
vl =
2GMS
r
1/2
puisque |K | = GM sM p . Notons que cette vitesse dépend de r. Ainsi la vitesse d’évasion de la Terre
sur son orbite est :
2GMS 1/2
vl ≈
= 42, 3 km . s−1
ST
qu’il convient de comparer à la vitesse de translation de la Terre sur son orbite qui vaut 30 km . s−1 .
b) Étoile noire et trou noir
Si la distribution sphérique de matière de l’étoile, de masse M , est telle que la vitesse d’évasion
d’un corps dans son voisinage soit supérieure à la vitesse de la lumière, même la lumière ne peut être
émise par ce corps ; l’étoile est noire. Il en résulte :
2GM
r
1/2
c
d’où
r r S avec
rS =
2GM
c2
Par exemple, le Soleil serait une étoile noire si sa masse MS ≈ 2 × 10 30 kg était concentrée dans une
sphère de rayon r inférieur à rS = 3 km, alors que son rayon est R S ≈ 696 000 km.
Ce résultat fut établi dès le XVIIIe siècle par l’astronome amateur anglais J. Michell, puis repris par
le mathématicien français P. Laplace, sous le vocable de trou noir, lequel n’a pas la même signification
aujourd’hui en astrophysique. En effet, en astrophysique, un trou noir est une région de l’espace-temps
dont la courbure est telle que même la lumière ne peut s’en échapper (cf. Relativité et invariance.
Cette définition fut proposée en 1967 par l’astrophysicien américain J. Wheeler. La confusion entre
étoile noire et trou noir vient de la coïncidence entre la valeur de rS , calculée précédemment à partir
de la mécanique newtonienne, et le rayon de Schwarzschild, introduit par l’astrophysicien allemand
K. Schwarzschild, dans l’hypothèse d’un espace-temps courbe à symétrie sphérique.
Remarque : La Terre se comporterait comme un astre noir si toute sa masse était concentrée dans une
sphère de rayon r T = 2GMT /c2 = 9 mm !
IV . — SATELLITES DE LA TERRE
La Terre possède un satellite naturel, la Lune, dont les caractéristiques ont été rassemblées en introduction de l’ouvrage. Rappelons que son mouvement de révolution autour de la Terre a une période
sidérale de 27, 3 jours (par rapport au référentiel géocentrique) et une période synodique de 29, 5
jours (par rapport au référentiel terrestre). Cette période de révolution coïncide avec la période de rotation propre (autour de son axe de révolution) ; il en résulte que la Lune présente en moyenne la même
face à la Terre.
Depuis 1958, de nombreux satellites artificiels ont été envoyés autour de la Terre. Leurs mouvements satisfont à des lois du type « lois de Kepler ». Le point P1 le plus proche de la Terre est le périgée,
le point P2 le plus éloigné est l’apogée.
209
Corps ponctuel soumis à une force centrale conservative
IV . 1 . — Mouvement circulaire d’un satellite de la Terre
a) Vitesse de satellisation
La vitesse de satellisation d’un satellite est la vitesse v s pour laquelle son mouvement est circulaire
et donc uniforme, à une distance r0 du centre de la Terre. On l’obtient rapidement en appliquant la loi
fondamentale de la dynamique au satellite (masse m) :
mvs2
GmM T
=
r0
r20
d’où
vs =
GMT
r0
1/2
et la durée de révolution :
3/2
Ts =
2pr0
2pr 0
=
(GMT )1/2
vs
telle que
4p 2
Ts2
=
r30
GMT
Exemples :
Pour la Lune, on trouverait, si sa trajectoire était un cercle de rayon r 0 = (6400 + 383 400) km :
6, 67 × 10 −11 × 6 × 10 24
vs =
(6 400 + 383 400) × 103
1/2
≈ 1 km.s−1 et T s =
2pr0
≈ 28, 3 jours
v0
Cette durée est en réalité 27,3 jours .
Depuis octobre 1957, date du premier satellite terrestre « Spoutnik » (compagnon en russe) de
nombreux satellites artificiels ont été mis sur orbite circulaire autour de la Terre. Pour les satellites SPOT
(Satellite sPécialisé dans l’Observation de la Terre) et ISS (International Space Station) qui sont situés
aux altitudes respectives hs = 832 km et h i = 400 km, les vitesses de satellisation sont très proches
puisque ces distances sont faibles devant le rayon terrestre R T = 6 400 km. On trouve respectivement
7 432 m.s−1 et 7 671 m.s−1 , et pour les durées de révolution 1, 69 h et 1, 55 h .
c Dunod – Toute reproduction non autorisée est un délit
b) Influence d’une force de frottement sur un satellite
À partir de l’analyse précédente, on peut lever le paradoxe suivant : un satellite, soumis
à la force de frottement due aux couches d’air raréfié de l’atmosphère, a sa vitesse qui augmente !
En effet, la force de frottement étant opposée à la vitesse, la puissance P f de cette force non
conservative est négative. Il en résulte que l’énergie mécanique du satellite diminue :
d Em
= Pf < 0
dt
Comme le mouvement circulaire est peu perturbé, on peut admettre qu’on a toujours les relations établies
en II.7 entre les différentes énergies : Em = −E k = Ep/2 ; l’énergie cinétique E k doit donc augmenter.
Ce résultat doit être attribué au rôle joué par l’énergie potentielle et à notre référence inconsciente à
des mouvements avec force de frottement dans lesquels l’énergie potentielle ne joue aucun rôle. Ici
l’augmentation de Ek sert à compenser la trop forte diminution de E p . Le graphe de la figure 12.6
permet de visualiser ces résultats et de constater que r0 diminue sous l’action d’une force de frottement.
210
12. Corps ponctuel soumis à une force centrale conservative
Énergies
z0 z
Ek
S
Ω
O
r0
y
R
T
Ep
x
x0
Em
y0
Rg
F IG . 12.6.
F IG . 12.7.
c) Satellite géostationnaire
On dit qu’un satellite est géostationnaire s’il est fixe par rapport au référentiel terrestre R = Txyz.
Établissons les propriétés de son mouvement par rapport au référentiel géocentrique R g = Tx0 y 0z0
(Fig. 12.7). Notant S le corps ponctuel représentant le satellite, il vient, d’après la composition des
vitesses entre Rg et R :
vS/Rg = v S/R + V T × TS = VT × TS
puisque
v S/R = 0
Donc vS/Rg doit être orthogonal à VT qui est porté par Tz o. Comme le plan de la trajectoire doit
contenir le centre de force T, ce plan est le plan équatorial. D’autre part, le mouvement est circulaire
car la norme de TS est aussi constante dans ce référentiel.
Enfin, appliquons la troisième loi de Kepler à ce mouvement, en imposant T = 2p/V T , V T étant
la vitesse de rotation de la Terre autour de son axe :
T2
4p2
4p 2
≈
=
GMT
V 2T r30
r03
soit
r0 =
GMT
V2T
1/3
Ordre de grandeur : Compte tenu des valeurs de V T ≈ 7, 3 × 10−5 rad . s −1 et MT ≈ 6 × 1024 kg,
on obtient r0 ≈ 42 000 km et donc une altitude h0 ≈ 35 400 km. Par exemple, le satellite Télécom 2B,
mis sur orbite géostationnaire en avril 1992, est situé à une altitude de 35 587 km.
d) Énergie de satellisation
L’énergie mécanique d’un satellite de masse m, en mouvement circulaire uniforme autour de la
Terre est appelée l’énergie de satellisation. On obtient aisément son expression selon :
E m = Ek + E p
avec
Ep = −
|K |
r0
et Ek =
On a donc :
Em =
−GmMT
Ep
= −Ek =
2r0
2
mv2s
|K |
=
2
2r0
211
Corps ponctuel soumis à une force centrale conservative
Remarque : Cette dernière relation avait déjà été établie dans le cadre de l’analyse générale du problème de Kepler, en faisant e = 0 (trajectoire circulaire).
Exprimons l’énergie qu’il faut communiquer à un engin spatial pour le satelliser autour de la Terre
à la distance r 0 de son centre. L’énergie cinétique initiale étant due uniquement au mouvement de
rotation de la Terre, l’énergie mécanique initiale est :
1
GmM T
Em,i = Ek + E p = mV2T R2T cos 2 l −
RT
2
en désignant par RT le rayon de la Terre, l la latitude du lieu et V T la vitesse de rotation de la Terre
autour de l’axe des pôles. Comme l’énergie mécanique finale est −GmM T /(2r 0), on en déduit l’apport
d’énergie nécessaire à la satellisation :
1
1
mV2T R 2T cos 2 l
−
−
2r0
2
RT
Numériquement, cet apport par kilogramme de masse satellisée vaut :
DEm = Em,f − E m,i = −GmM T
1
1
DEm
V 2 R2 cos2 l
= GM T
−
− T T
m
RT
2r0
2
Pour un corps lancé depuis Kourou (r0 = RT et cos l ≈ 1), on trouve :
DEm
= (31, 25 − 0, 11) × 106 = 31, 14 MJ . kg−1
m
IV . 2 . — Vitesse d’évasion des satellites terrestres
a) Expression et ordre de grandeur
Dans le cas des satellites terrestres, la vitesse d’évasion a pour expression :
vl =
2|K |
mr
1/2
=
2GMT
r
1/2
=
√
2 v s ≈ 1, 414 v s
c Dunod – Toute reproduction non autorisée est un délit
Comme R T ≈ 6, 4 × 10 6 m et MT ≈ 6 × 1024 kg , la vitesse d’évasion au sol d’un engin spatial est,
vl ≈ 11, 2 km . s−1 . Si la vitesse communiquée au sol ou près du sol est inférieure à la vitesse d’évasion,
la trajectoire du satellite est une ellipse qui passe par le point de lancement.
Remarque : Il est instructif de comparer la vitesse d’évasion précédente à la vitesse quadratique
moyenne des molécules de gaz atmosphériques, telles que l’oxygène, à la température
T = 300 K. Le calcul donne (cf. Thermodynamique) v q,O = 484 m . s−1, alors que dans
le cas des molécules d’hydrogène, on trouve v q,H = 1 934 m . s −1. On explique ainsi que
l’oxygène gazeux soit plus abondant sur Terre que l’hydrogène gazeux.
b) Mise en orbite terrestre d’un satellite
Pour mettre sur une orbite terrestre un satellite, on doit procéder en deux temps (Fig. 12.8).
i) Dans une première phase, dite balistique, l’engin s’éloigne de la Terre sur une ellipse de foyer T
jusqu’au point choisi de la trajectoire, par exemple l’apogée.
ii) Dans une seconde phase, la satellisation, on communique au satellite un accroissement de vitesse qui lui permet d’avoir une trajectoire circulaire autour de la Terre.
212
12. Corps ponctuel soumis à une force centrale conservative
Lune
Phase de satellisation
autour de la Terre
S
Phase balistique
Phase de transfert
L
Phase de satellisation
autour de la Lune
T
Terre
F IG . 12.8.
Dans la mission lunaire Apollo XI (juillet 1969), on a satellisé autour de la Terre, sur une trajectoire
circulaire, la cabine spatiale ainsi que le troisième étage de la fusée Saturne V. L’allumage de cet étage
a permis à la cabine spatiale, avec son module lunaire, d’atteindre une vitesse voisine de la vitesse
d’évasion terrestre et donc d’aborder le voyage Terre-Lune. La satellisation autour de la Lune exige un
ralentissement de la cabine spatiale, car la vitesse de satellisation correspondante est environ six fois
plus faible.
Remarque : Ce freinage indispensable, que l’on effectue à l’aide de rétrofusées, est une opération
délicate, car il est effectué au moment où les communications hertziennes sont gênées par
la présence de la Lune entre la cabine spatiale et la Terre.
CONCLUSION
Rappelons les points essentiels.
(1) Le mouvement d’un corpuscule, de masse m, soumis à une force centrale conservative, s’obtient par simple application des lois de conservation du moment cinétique L et de l’énergie mécanique
E m.
ṙ2
L2
L = mr 2ẇ ez = Cte et m + Ep,ef (r) = Em = Cte avec Ep,ef (r) = E p (r) +
2
2mr 2
(2) L’exemple choisi du problème de Kepler, pour lequel l’énergie potentielle s’écrit E p = K /r,
souligne toute l’importance du sujet. Le mouvement des deux points en interaction est, dans le référentiel
du centre de masse, celui d’une particule fictive de masse m qui satisfait aux équations précédentes. En
outre, il existe, dans ce cas, une troisième constante de mouvement :
R = v × L + K e r = Cte
(3) La résolution de l’équation différentielle du mouvement donne une trajectoire conique :
r=
p
−ε + e cos(w − w0 )
avec
p=
L2
m|K |
e étant excentricité. Si K > 0, la conique est toujours une hyperbole. Si K < 0 la conique est, soit
une hyperbole, soit une ellipse suivant que l’état est libre ou lié ; à la frontière de ces deux mouvements,
il y a l’état libre singulier correspondant à une trajectoire parabolique.
Corps ponctuel soumis à une force centrale conservative
213
(4) En ce qui concerne le mouvement des planètes et des satellites, retenons les trois lois de Kepler
ainsi que les expressions de la vitesse d’évasion et de la vitesse de satellisation d’un satellite artificiel
de la Terre :
2GM T 1/2 √
GMT 1/2
et v l =
vs =
= 2 vs
r
r
Cette étude concerne aussi le cas d’une force répulsive pour lequel les états possibles sont toujours
libres. Nous étudierons ultérieurement ces états (cf. chapitre 15).
EXERCICES ET PROBLÈMES
P12– 1. Oscillateur bidimensionnel
Une particule (masse m = 0, 1 kg) est soumise à une seule force dont l’énergie potentielle est de
la forme : E p = Kr2 /2, K étant une constante d’interaction qui vaut 40 N . m−1 .
1. Trouver l’expression de la force correspondante. En déduire que le mouvement est plan.
2. Écrire les lois de conservation du mouvement de la particule, en fonction des coordonnées
polaires (r, w). Calculer la valeur du moment cinétique, sachant qu’à l’instant pris comme origine
r = r0 = 1, 2 m, v0 = 10 m . s−1 et que l’angle a0 = (r0 , v0) vaut p/6.
3. Quelle est l’énergie potentielle effective en fonction de r ? Représenter avec soin son graphe.
Trouver la valeur de r correspondant à un équilibre stable.
4. Calculer les valeurs minimale et maximale de r correspondant à une énergie mécanique de
100 J.
P12– 2. Périodes des planètes du système solaire
Calculer, en année terrestre, les périodes de révolution des planètes : Mercure, Vénus, Mars, Jupiter,
Saturne et Uranus. On utilisera les caractéristiques du système solaire rassemblées dans l’annexe 1.
P12– 3. Vitesses d’évasion
c Dunod – Toute reproduction non autorisée est un délit
Calculer les vitesses d’évasion à la surface de la Lune, Vénus, Mars et Jupiter. Les rayons et les
masses de ces astres, comparés à ceux de la Terre, sont donnés dans l’annexe 1.
P12– 4. Satellite Arabsat, Spot et satellite d’observation à haute résolution
On étudie le mouvement de divers satellites artificiels de la Terre par rapport au référentiel géocentrique Rg = Tx0y 0z 0. On ne prend en compte que l’interaction entre le satellite et la Terre et on
suppose que cette dernière a la symétrie sphérique.
1. Un satellite artificiel S, de masse m, décrit autour de la Terre une orbite circulaire de rayon r.
a) Expliquer pourquoi le mouvement est uniforme.
b) Déterminer, en fonction de r, la vitesse du satellite ainsi que sa période de révolution.
c) Trouver, en fonction de r, l’énergie cinétique Ek , l’énergie potentielle Ep et l’énergie mécanique Em du satellite ; on adoptera comme origine de Ep sa valeur lorsque r est infini. Tracer les
graphes Ek (r), Ep (r) et Em (r).
d) Quelle est l’énergie potentielle de S au sol ? Quelle est son énergie cinétique lorsqu’il repose
sans vitesse en un point du sol de latitude l ?
214
12. Corps ponctuel soumis à une force centrale conservative
2. Le 8 février 1985, le lanceur européen Ariane III a mis sur une orbite géostationnaire le satellite
Arabsat F1 de masse m. Ce satellite est fixe par rapport à un référentiel terrestre d’origine T.
a) Montrer qu’un tel satellite doit être contenu dans le plan équatorial terrestre et trouver la valeur
rs du rayon de l’orbite. En déduire sa vitesse.
b) Donner, en fonction de r et l, l’expression de l’énergie à fournir pour placer ce satellite sur
une telle orbite.
3. Le 22 février 1986, Ariane III plaçait SPOT (Satellite sPécialisé dans l’Observation de la Terre)
sur orbite circulaire à une altitude de 832 km.
a) Calculer la quantité (GM T /RT ) 1/2. En déduire la vitesse orbitale et la période de SPOT.
b) L’image d’un carré, donnée par un système optique embarqué sur SPOT, dont chaque côté est
vu sur la Terre sous un angle de 4 ◦, est constituée de 9 × 10 6 taches élémentaires appelées pixels
(cf. Optique). Quelle est la distance sur la Terre qui correspond à l’écart entre deux pixels ?
4. Un satellite d’observation a une orbite circulaire très basse, ce qui permet de discerner les détails
d’environ 1 m sur la Terre.
a) Calculer la vitesse orbitale et la période d’un tel satellite pour la valeur h = 180 km.
b) Par suite des collisions avec les molécules d’air des couches supérieures de l’atmosphère, le
satellite est soumis à une force de frottement opposée à la vitesse v et de norme bv 2 /h, h étant
l’altitude et b/m une constante égale à 10−8 SI. Comment varie l’énergie mécanique du satellite ?
Montrer que la vitesse du satellite, ainsi freiné, augmente.
c) En déduire, en fonction de h, l’expression approchée de la variation d’altitude Dh du satellite,
après une révolution. Calculer Dh.
P12– 5. Orbites de transfert d’Hohmann
On réalise le transfert d’un satellite d’une orbite circulaire basse vers une orbite géostationnaire, en
empruntant une orbite elliptique ayant son périgée Sp sur l’orbite basse et son apogée S a sur l’orbite
géostationnaire. Pour cela, on communique une variation brusque de vitesse au satellite en éjectant du
combustible pendant une durée très courte.
1. Dans quel plan doit être située l’orbite basse pour que les trois orbites soient coplanaires ?
2. Trouver l’énergie, par unité de masse, du satellite sur l’orbite de transfert ainsi que la durée du
séjour sur cette orbite.
P12– 6. Excentricité d’une trajectoire de satellite
Un satellite artificiel de la Terre a été lancé d’un point A 0 , avec une vitesse v 0 perpendiculaire
au rayon vecteur r0. Quelle est l’excentricité e de la trajectoire en fonction de v 0 et de la vitesse de
satellisation vs ? Calculer e pour v0 = v s, v0 = 0, 5v s et v0 = 2vs .
P12– 7. Mouvement hyperbolique d’un satellite artificiel
Un satellite artificiel S, de masse m = 2 000 kg, est placé sur une orbite circulaire d’attente, de
rayon r0 = R + h autour de la Terre (h = 180 km). En un point de sa trajectoire, on lui communique
un excédent de vitesse. La nouvelle vitesse v1 est tangente à l’orbite circulaire et vaut 14 km . s −1.
1. Exprimer, en fonction de r 0, la valeur v0 de la vitesse lorsque le satellite est sur son orbite
d’attente. Calculer numériquement v 0 ainsi que son énergie mécanique. On prendra comme origine de
l’énergie potentielle celle correspondant à S infiniment éloigné de la Terre et pour le rayon de la Terre
RT = 6 400 km.
Corps ponctuel soumis à une force centrale conservative
215
2. a) Montrer que la nouvelle trajectoire est contenue dans un plan que l’on déterminera et calculer
la nouvelle valeur de l’énergie.
b) Établir que l’équation de la trajectoire s’écrit dans ce plan r = p/(1 + e cos w), e et p étant
deux constantes dont on donnera la signification, r la coordonnée radiale et w l’angle que fait le rayon
vecteur avec le rayon vecteur initial.
c) Exprimer p en fonction du moment cinétique et calculer sa valeur. En déduire e.
P12– 8. Trajectoire de Télécom 2A
Le satellite Télécom 2A a été placé, en décembre 1991, sur une trajectoire géostationnaire. Pour
cela, on a utilisé une trajectoire de transfert entre une orbite circulaire basse, à une altitude de 300 km et
une orbite circulaire haute à une altitude de 35 980 km. La trajectoire de transfert est une demi-ellipse
dont l’un des foyers est occupé par la Terre ; son périgée Sp est situé sur l’orbite basse et son apogée Sa
sur l’orbite géostationnaire. On a réalisé ce transfert en communiquant des variations brutales de vitesse
en Sp et en S a par éjection convenable de masse.
1. Calculer les vitesses de satellisation v p et va , respectivement pour hp = 300 km et
h a = 35 980 km.
2. Dans quel plan particulier est située la trajectoire géostationnaire ? Dans quel plan doit être
contenue l’orbite de transfert ? Représenter les trois orbites sur un schéma.
3. Transfert d’Hohmann
a) Quelle est, en fonction de v p, rp et r a, la variation de vitesse Dvp du satellite au périgée Sp ,
entre l’orbite initiale et l’orbite de transfert ? Application numérique. On prendra R T = 6 400 km pour
rayon terrestre.
b) Même question en S a, entre l’orbite de transfert et l’orbite finale ? Application numérique.
P12– 9. Satellite COBE (COsmic Background Explorer)
Le satellite COBE, lancé en novembre 1989 pour étudier le rayonnement millimétrique émis par le
fond du ciel, a été placé à une altitude de 900 km. Calculer, en heure et minute, sa période de révolution
autour de la Terre ?
c Dunod – Toute reproduction non autorisée est un délit
P12– 10. Masse volumique de Jupiter
Montrer qu’en comparant la période de révolution d’un satellite de Jupiter à celle de la Lune autour
de la Terre, on peut déduire le rapport des masses volumiques de ces deux planètes, si l’on connaît le
rayon des orbites supposées circulaires des satellites.
Application : La période de révolution de Ganymède, situé à une distance du centre de Jupiter égale
à 15 fois le rayon de Jupiter, est 7 j 3 h 40 min ; la période de révolution de la Lune, située à une distance
égale à 60 fois le rayon de la Terre, est 27 j 7 h 40 min. En déduire la masse volumique de Jupiter sachant
que celle de la Terre est 5, 52 g . cm−3 .
P12– 11. Durée de passage d’une comète dans l’environnement terrestre
Une comète du Soleil a une trajectoire parabolique dans le plan de l’écliptique ; on rappelle que le
centre de la Terre a, dans ce plan, un mouvement pratiquement circulaire autour du Soleil.
1. Écrire, en coordonnées polaires (r, w), les deux équations relatives à la comète et à la Terre. On
prendra l’origine de l’angle w au périhélie de la comète.
216
12. Corps ponctuel soumis à une force centrale conservative
2. Montrer que les trajectoires de la Terre et de la comète se coupent pour les valeurs w 0 et −w0
que l’on exprimera en fonction du rapport des paramètres des deux trajectoires.
3. En intégrant l’équation de conservation du moment cinétique relative à la comète, trouver, en
fonction de w0 , l’expression de la durée de passage de la comète à l’intérieur de la trajectoire terrestre.
P12– 12. Mise sur orbite elliptique d’un satellite
Un satellite artificiel de la Terre S, de masse m, est placé sur une orbite elliptique définie par les
conditions initiales suivantes : le vecteur position est r 0 = TS et le vecteur vitesse v0, de valeur égale
à la vitesse de satellisation relative à r0 , fait l’angle a0 avec la normale à r 0 . On repère la position de
S par les coordonnées polaires (r, w), w étant compté à partir de la position du périgée P.
1. Rappeler l’équation du mouvement, en coordonnées polaires, en précisant l’expression du paramètre p de la conique en fonction du carré L2 du moment cinétique. De même, exprimer l’excentricité
e en fonction de p et de l’énergie mécanique E m.
2. Établir, en fonction de r 0 et a0, les expressions de p, e, r min, r max et du demi-grand axe a
de l’ellipse.
P12– 13. Comète Hale-Bopp
La comète Hale-Bopp a, dans le référentiel de Copernic, une trajectoire conique, autour du centre
S du Soleil, d’excentricité e = 0, 995 et de période de révolution T = 2 400 années.
Pour analyser simplement un tel mouvement, on suppose que la comète est assimilée à un point
matériel H, de masse mHB , soumis à la seule action du Soleil que l’on réduit à son centre S, de
masse MS.
1. Quelle est l’expression vectorielle de la force qu’exerce le Soleil sur la comète en fonction du
vecteur r = SH ? En déduire que le mouvement de H autour de S est plan.
2. Établir l’expression de l’énergie potentielle de la comète dans le champ gravitationnel du Soleil
en fonction de r. On prendra comme origine des énergies potentielles la valeur pour r infini.
3. L’équation de la trajectoire de la comète en coordonnées polaires (r, w) s’écrit :
p
r=
1 + e cos w
a) Donner l’allure de la trajectoire en précisant la position de S, celle de l’aphélie A (point le plus
éloigné de S) et celle du périhélie P (point le plus proche de S).
b) Établir la relation entre p, e et le demi grand axe a de l’ellipse.
4. a) À l’aide de la troisième loi de Kepler, appliquée au mouvement de la comète et à celui de la
Terre autour du Soleil, calculer le demi grand axe de l’ellipse. En déduire p.
b) Calculer, la distance r max de S à l’aphélie et la distance rmin de S au périhélie. Quelle est la
distance qui sépare la Terre de la comète au périhélie de sa trajectoire ?
5. a) Que peut-on dire de la composante radiale de la vitesse de H au périhélie et à l’aphélie ?
Justifier.
b) Calculer la vitesse minimale v min de la comète sachant que sa vitesse maximale a la valeur
vmax = 200 000 km . h −1.
6. Quelle est l’énergie mécanique de la comète dans son mouvement autour du Soleil ? Calculer sa
valeur en joule, sachant que m HB = 2 × 1012 kg. Commenter le signe de l’énergie.
13
c Dunod – Toute reproduction non autorisée est un délit
Système de corps ponctuels en interaction.
Problème à deux corps
En principe, l’étude d’un système de N corps ponctuels en interaction se pose de la même façon
que pour un seul corps.
Cependant, dans le cas d’un seul corps ponctuel, l’analyse était simple car les forces ne faisaient
apparaître que les variables du point considéré : la loi fondamentale fournissait alors trois équations
scalaires comportant, lorsque les forces sont connues, trois inconnues qui sont les trois degrés de liberté
du corps dans l’espace.
En revanche, dans le cas d’un système de N corps, l’analyse est très complexe car, outre le grand
nombre de corps, les équations du mouvement de chaque corps font apparaître les coordonnées de tous
les autres. Le système d’équations à résoudre est alors inextricable. Aussi, pour N très grand, comme
c’est le cas en thermodynamique où N est de l’ordre du nombre d’Avogadro NA ≈ 6, 02 × 10 23 mol−1 ,
utilise-t-on des méthodes statistiques (cf. Thermodynamique).
Si le nombre de corps ponctuels n’est pas très grand, comme dans le cas du système Soleil-planètes,
on s’appuie sur la dissymétrie du problème : en raison de sa très grosse masse, le Soleil a un rôle
particulier ; on ramène alors le problème initial à N − 1 problèmes à deux corps « Soleil-planète » en
considérant que l’influence des autres planètes ne constitue qu’une perturbation. On comprend dès lors
tout l’intérêt que présente l’étude du problème à deux corps.
En vue d’exprimer les lois auxquelles satisfait un système de N corps ponctuels, il est nécessaire
en premier lieu de définir les éléments cinétiques qui permettent de décrire son mouvement.
I . — ÉLÉMENTS CINÉTIQUES D’UN SYSTÈME DE CORPUSCULES
I . 1 . — Schématisation du système
Considérons un système déformable S d de N corpuscules, en mouvement par rapport à un référentiel R , sous l’action de leurs forces d’interaction et des forces qu’exerce le milieu extérieur sur lui
(Fig. 13.1a). Le nombre d’inconnues dont dépend a priori le système est 3N puisque chaque corpuscule a trois degrés de liberté.
On caractérise à chaque instant l’état mécanique de S d par l’ensemble des N vecteurs positions
ri et des N vecteurs vitesses v i ; par conséquent 6N variables doivent être données pour connaître
l’état de S d. En fait, comme nous le verrons ultérieurement (cf. chapitre 24), on préfère caractériser cet
état par l’ensemble des N vecteurs positions r i et des N vecteurs quantités de mouvement pi , ces
dernières grandeurs étant des concepts plus riches que les vitesses.
218
13. Système de corps ponctuels en interaction. Problème à deux corps
z
z
A2
An C
A1
O
x
x
R∗
A1 (m )
y
C
Sd
A2 (m )
y
T mG (A2 )
mG(A 1)
R
a)
b)
F IG . 13.1.
I . 2 . — Quantité de mouvement du système
Considérons, par rapport à R, l’ensemble des vecteurs quantités de mouvement p i = m ivi associés aux points {Ai } d’un système matériel Sd de N corps ponctuels. La quantité de mouvement du
système est la somme vectorielle des quantités de mouvement (cf. section III) :
P=
pi =
i
m i vi
i
Comme vi = (d OA i/ d t) R, P s’écrit aussi, en permutant les opérateurs sommation et dérivation :
P=
d
dt
mi OAi
i
Introduisons le centre de masse C, c’est-à-dire le barycentre des corps ponctuels A i affectés des
masses mi . Comme :
1
m iOA i où M =
mi
OC =
M i
i
désigne la masse totale de S d, il vient :
P=M
d OC
= MvC
dt
La quantité de mouvement d’un système matériel est celle de son centre de masse affecté de la
masse totale.
Remarque : Le centre de masse C est souvent appelé centre de gravité G, car, en raison de l’égalité des masses inerte et grave, et de l’hypothèse raisonnable d’un champ de gravitation
uniforme sur l’étendue du système, ces deux points sont pratiquement confondus. En le
désignant par C, on a voulu souligner que le barycentre des masses inertes est défini indépendamment de la force de gravitation. On peut préciser cette distinction en considérant
deux points matériels A1 et A2, de même masse m, à la surface de la Terre (Fig. 13.1b).
Si ces points sont suffisamment éloignés, le centre de masse C se trouve au milieu de la
corde A1 A2 , alors que les deux forces de gravitation, supposées concourantes au centre
T de la Terre, sont équivalentes à une seule force dont le support passe par T (cf. chapitre 1). Notons que si les deux forces n’étaient pas concourantes, comme c’est le cas en
général, on ne pourrait pas les remplacer par une force unique. Ajoutons que, dans une cabine spatiale, le système A1A2 n’a pas de centre de gravité G , alors qu’il a toujours un
centre de masse C .
219
Système de corps ponctuels en interaction. Problème à deux corps
I . 3 . — Référentiel du centre de masse
On appelle référentiel du centre de masse R ∗ , associé à R, le référentiel en translation par rapport
à R et tel que P∗ = 0. Comme P∗ = Mv∗C , on en déduit que v ∗C = 0. Par conséquent, le centre de
masse est fixe dans R∗ ; aussi choisit-on généralement le centre de masse comme origine de R∗ .
Cette définition est celle que l’on adopte en relativité où le centre de masse d’un ensemble de
particules ne peut être défini géométriquement (cf. Relativité et invariance). Aussi l’avons-nous préférée
à la suivante donnée en mécanique newtonienne : R∗ est le référentiel en translation par rapport à R et
d’origine le centre de masse C. Évidemment, dans l’approximation non relativiste, les deux définitions
coïncident.
I . 4 . — Moment cinétique du système
a) Définition et propriétés
Le moment cinétique d’un système de N corps ponctuels en un point O, par rapport au référentiel R, est la somme vectorielle des moments cinétiques en O de chaque élément (cf. section III) :
LO =
i
OA i × mi vi
Explicitement, on écrira L O/R et v i/R. Si O désigne un autre point, on a :
LO =
i
O Ai ×mi vi =
(O O+OA i )×mi vi =
i
i
OA i ×mi vi +OO×
i
mi v i = L O+O O × P
On retiendra donc :
LO = LO + OO × P
ou
Il en résulte que, dans R∗ où P∗ = 0, on a :
LO = L C + OC × P
L∗O = L∗O = L∗C
c Dunod – Toute reproduction non autorisée est un délit
Ainsi, dans R∗ , le moment cinétique est indépendant du point où on le calcule. On pourra donc écrire,
dans R∗ , sans autre précision :
L∗ =
CAi × mi v∗i
i
b) Théorème de Kœnig relatif au moment cinétique
Ce théorème, établi par le mécanicien allemand J. Kœnig, permet de relier le moment cinétique L O
relatif à R au moment cinétique L∗ :
LO =
i
OAi × mi vi
et
L∗ =
i
CAi × mi v ∗i
Comme OA i = OC + CA i et vi = v∗i + v C , d’après la composition des vitesses entre les deux
référentiels R et R∗ en translation, il vient :
LO =
i
(OC + CAi ) × mi (v∗i + vC ) = OC ×
i
m iv∗i + OC ×
mi
i
vC + L∗ +
i
CA i × mi vC
220
Or
13. Système de corps ponctuels en interaction. Problème à deux corps
i mi
∗
i m iv i
= M,
= 0 et
i m i CA i =
0. Par conséquent :
LO = OC × Mv C + L ∗ = OC × P + L ∗
Le moment cinétique d’un système matériel, par rapport à R, est la somme du moment cinétique de
son centre de masse affecté de la masse totale et de son moment cinétique par rapport à R ∗.
En comparant le théorème de Kœnig à la relation L O = LC + OC × P, on obtient :
LO = LC + OC × P = OC × P + L ∗
d’où
LC = L∗
Le moment cinétique par rapport à R∗ est égal au moment cinétique en C par rapport à R.
c) Exemples
1) Moment cinétique de la Terre par rapport au centre du Soleil
Le moment cinétique de la Terre par rapport au centre du Soleil s’écrit, L S = ST × MT vT + L∗T , où
le vecteur ST × MT vT , qui est porté par un axe perpendiculaire au plan de l’écliptique, a pour valeur :
ST MT vT ≈ 6 × 1024 × 1, 49 × 1011 × 3 × 10 4 ≈ 2, 68 × 1040 J . s
Quant au moment cinétique de la Terre par rapport à R ∗ = R g , il est porté par l’axe sud-nord, qui fait
l’angle 23 ◦26 avec l’axe précédent et vaut (cf. chapitre 17) : (2/5)MT R2 V = 7, 18 × 10 31 J . s .
On voit que le moment cinétique de la Terre est principalement dû au mouvement de son centre de
masse.
2) Moment cinétique de l’électron dans l’atome d’hydrogène
Dans l’atome d’hydrogène, l’électron ne peut pas être assimilé à un simple corps ponctuel, car son
moment cinétique au point où se trouve le noyau est la somme de deux termes : le moment cinétique
orbital OA × me vC , et un moment cinétique interne R∗ qui n’est pas nul, appelé moment cinétique
de spin, du verbe anglais « to spin » qui signifie tourner (cf. Quantique). Ces deux contributions sont du
même ordre de grandeur ∼ 10−34 J . s.
I . 5 . — Énergie cinétique du système
a) Définition
L’énergie cinétique d’un système est la somme des énergies cinétiques des N points matériels qui
le constituent (cf. section III) :
Ek =
i
1
mi v2i
2
b) Théorème de Kœnig relatif à l’énergie cinétique
Ce théorème relie l’énergie cinétique d’un système matériel S d , par rapport à un référentiel quelconque R, à l’énergie cinétique de ce même système par rapport au référentiel du centre de masse R ∗
associé à R. Comme vi = v∗i + vC , d’après la composition des vitesses entre R et R∗ , il vient :
Ek =
i
1
m i (v ∗i + vC )2 =
2
i
1
m i v∗i 2 + (
2
i
m i v∗i ) · vC +
1
(
2
m i )v 2C
i
Système de corps ponctuels en interaction. Problème à deux corps
soit, puisque
∗
i m iv i
221
=0 :
Ek =
1 2
P2
MvC + Ek∗ =
+ E k∗
2
2M
L’énergie cinétique d’un système matériel, dans R, est la somme de l’énergie cinétique de son centre
de masse affecté de la masse totale et de son énergie cinétique dans R∗ . On appelle souvent le premier
terme, Mv2C /2, l’énergie cinétique de translation.
c) Exemples
(1) Énergie cinétique de la Lune dans le référentiel géocentrique R g
Cette énergie cinétique est la somme de deux termes : E k = M Lv 2L/2 + Ek∗ . Comme le centre de
masse de la Lune se déplace à une vitesse d’environ 1 km . s−1 , le premier vaut :
1
× 73, 5 × 1021 × 10 6 ≈ 36, 5 × 10 27 J
2
Quant au second, on peut montrer (cf. chapitre 17) qu’il a pour expression, si VL est le vecteur vitesse
de rotation autour de son axe de rotation :
1 2
1
× MLR 2L V2L = × 73, 5 × 10 21 × (1, 76 × 106) 2 × (2, 66 × 10−3 )2 ≈ 3, 22 × 1029 J
2 5
5
(2) Énergie cinétique d’une molécule d’un gaz
L’énergie cinétique d’une molécule d’un gaz est la somme de celle de son centre de masse et de
celle dans le référentiel du centre de masse de la molécule. Dans ce cas, on montre que ces énergies
sont du même ordre de grandeur (cf. Thermodynamique). À la température T = 300 K, on a, pour la
molécule diatomique de gaz chlorhydrique HCl :
1
3
MvC2 = k BT ≈ 37, 5 meV et E∗k = kBT ≈ 25 meV
2
2
kB ≈ 1, 38 × 10−23 J . K−1 étant la constante de Boltzmann.
c Dunod – Toute reproduction non autorisée est un délit
II . — PROBLÈME À DEUX CORPS
Soient deux corps ponctuels A 1 et A2, de masses respectives m 1 et m2 , en mouvement dans le
référentiel galiléen R , sous l’action de leur seule force d’interaction (Fig. 13.2). Le système est donc
isolé.
z
v1
r2
O
A2
r
A1
r1
y
v2
x
F IG . 13.2.
222
13. Système de corps ponctuels en interaction. Problème à deux corps
II . 1 . — Éléments cinétiques du système
a) Quantité de mouvement
Par rapport à R, la quantité de mouvement de ce système est :
P = p 1 + p 2 = m1 v1 + m2 v2 = (m1 + m2 )vC = MvC
Dans le référentiel du centre de masse R∗ , on a :
P ∗ = p∗1 + p∗2 = (m1 + m2)v∗C = 0
Il en résulte que, dans R∗, les quantités de mouvement de A 1 et A2 sont opposées. Évaluons p ∗1 et
p ∗2. D’après la composition des vitesses, on a :
p∗1 = m 1 v∗1 = m1 (v1 − vC ) = m 1 v1 −
d’où :
p∗1 = −p ∗2 =
m 1v1 + m2v 2
m1 + m2
m1 m 2
(v1 − v2 )
m1 + m 2
Cette dernière relation s’écrit aussi :
p∗ = p∗1 = −p∗2 = mv
en posant m =
m1 m2
m1 + m2
et v = v 1 − v2
Ainsi, dans R∗ , la norme de la quantité de mouvement de chacune des particules est égale à celle d’une
particule fictive A, de masse m et de vitesse v. La masse m est appelée la masse réduite du système
des deux corps. Remarquons qu’elle est inférieure ou égale à la plus petite des deux masses.
b) Moment cinétique
D’après le théorème de Kœnig, on a, pour le système des deux corps ponctuels :
LO = OC × (p 1 + p2) + L ∗
avec :
L∗ = CA 1 × p∗1 + CA 2 × p∗2 = (CA1 − CA 2) × p ∗1 = A2 A 1 × p ∗1 = r × mv
Ainsi, par rapport au référentiel du centre de masse R∗ , le moment cinétique du système des deux
corps ponctuels est égal au moment cinétique de la particule fictive A dont la position dans R ∗ est
définie par CA = r :
L∗ = CA × mv = r × p∗
c) Énergie cinétique
D’après le théorème de Kœnig, relatif à l’énergie cinétique, on a :
Ek/R =
1
(m1 + m2)v C2 + Ek∗
2
avec
E ∗k =
p∗2
p∗2
p∗2
1
+ 2 =
2m1
2m2
2
1
1
+
m 1 m2
=
p∗2
2m
Ainsi, l’énergie cinétique Ek∗ est celle d’une particule fictive A, de masse m et de vitesse v = v1 −v2 :
E ∗k =
1
p∗2
= mv 2
2m
2
Système de corps ponctuels en interaction. Problème à deux corps
223
II . 2 . — Système isolé de deux corps ponctuels
Pour un système isolé, les seules forces qui apparaissent sont les forces d’interaction mutuelle
lesquelles sont opposées selon la troisième loi de Newton (cf. chapitre 4). La quantité de mouvement du
système est alors constante puisque :
dP
d p 1 d p2
= F2→1 + F1→2 = 0
=
+
dt
dt
dt
Il en résulte, dans ce cas :
P = M vC = Cte
Le mouvement du centre de masse est donc rectiligne et uniforme.
Si, en outre, ces forces d’interaction dérivent d’une énergie potentielle, ce qui est généralement le
cas, il vient :
dW = dW1 + dW2 = F 2→1 · d r1 + F1→2 · d r 2 = − d Ep
L’application du théorème de l’énergie cinétique au système donne donc :
d’où :
d Ek,1 = F2→1 · d OA 1
et
d Ek,2 = F 1→2 · d OA2
d E k = d Ek,1 + d E k,2 = F2→1 · d OA 1 + F 1→2 · d OA 2 = − d Ep
Il en résulte pour l’énergie mécanique Em = Ek + E p :
d(Ek + E p)
d Em
=
= 0 soit
dt
dt
Em = Ek + E p = Cte
II . 3 . — Équations du mouvement dans le référentiel du centre de masse
c Dunod – Toute reproduction non autorisée est un délit
Le système des deux corps ponctuels étant isolé, le mouvement de translation de R ∗ , par rapport à R galiléen, est rectiligne et uniforme. Par conséquent, R ∗ est aussi galiléen. D’après la loi
fondamentale appliquée à A1, il vient :
d p ∗1
= F 2→1
dt
soit
m
dv
= F 2→1
dt
Cette dernière équation peut être considérée comme la loi fondamentale de la dynamique appliquée à
la particule A, de masse m, de vitesse v = v1 − v2 et soumise à la force F2→1 qui est centrale
puisqu’elle passe par C situé sur le vecteur A2 A1 . On a en effet :
m 1CA1 + m2CA2 = 0
et :
CA 1 =
soit
CA1
CA2
A 2A 1
CA
=−
=
=
m2
m1
m 1 + m2
m1 + m2
m2
CA
m1 + m2
et
CA2 =
−m1
CA
m 1 + m2
Les trajectoires de A1 et A 2 sont donc homothétiques de la trajectoire de A ; le centre d’homothétie
est C et ses rapports sont m 2/(m 1 + m 2) et −m 1 /(m1 + m 2) respectivement. Notons que, si l’une des
particules a une masse beaucoup plus faible que l’autre, elle peut être assimilée à la particule fictive A,
la position de la seconde coïncidant avec le centre de masse C.
224
13. Système de corps ponctuels en interaction. Problème à deux corps
II . 4 . — Conséquences de la conservation du moment cinétique
La force d’interaction qui s’exerce sur la particule fictive A étant centrale, car passant par le centre
de masse C, le mouvement est plan (cf. chapitre 12). Si on explicite la conservation du moment cinétique dans R∗ en coordonnées polaires (r, w) dans le plan du mouvement Cxy (Fig. 13.3), on obtient :
L∗ = L ∗z ez = r × mvA = rer × m(ṙ er + rw˙ ew ) = mr 2ẇ ez = Cte
Retenons donc :
L∗z = mr 2 ẇ = mC = 2m
a
en introduisant la constante des aires C et la vitesse aréolaire
= Cte
a
(cf. chapitre 12) :
z
L∗
R∗
x
y
C
A2
w
B
dw
A1
B
A
A
F IG . 13.3.
II . 5 . — Conséquences de la conservation de l’énergie
D’après la conservation de l’énergie mécanique dans R ∗, on a :
1
Em∗ = Ek∗ + E p = m( ṙ 2 + r 2 ẇ2) + Ep = Cte
2
Cette équation de conservation, combinée à la précédente, fournit l’équation du mouvement radial. En
effet, introduisant le carré du moment cinétique L 2 = m 2r 4 ẇ2, on obtient :
1 2
L2
mṙ +
+ E p (r) = E ∗m
2
2mr2
soit :
1 2
L2
mṙ + E p,ef = E ∗m avec E p,ef = Ep (r) +
2
2mr2
Ainsi, tout se passe comme si la particule A était soumise à une énergie potentielle effective E p,ef dans
le mouvement unidimensionnel radial.
II . 6 . — Analyse qualitative du problème à deux corps
On considère généralement deux types particuliers d’énergie potentielle effective : le puits et la
barrière d’énergie potentielle.
225
Système de corps ponctuels en interaction. Problème à deux corps
a) Puits d’énergie potentielle
Un cas fréquent est celui où l’énergie potentielle effective passe par un minimum puis tend vers 0
lorsque r devient très grand (Fig. 13.4). Il correspond par exemple à l’interaction gravitationnelle si le
moment cinétique n’est pas nul ou à l’interaction entre deux atomes dans la formation d’une molécule.
Comme m ṙ2 /2 = E ∗m − Ep,ef 0, on doit distinguer deux types de mouvement suivant les valeurs
de l’énergie mécanique Em∗ :
i) Si E m∗ 0, l’état est libre car r r min peut prendre une valeur infinie.
ii) Si E m∗ < 0, l’état est lié car r oscille entre deux valeurs extrêmes appelées distances apsidales.
Il faut noter qu’en dehors de cas simples, tels que le problème de Kepler où l’on sait que la trajectoire
est une ellipse, l’oscillation de r n’implique pas que la trajectoire soit fermée.
Lorsque Em∗ est égal à la valeur minimale E0 de l’énergie potentielle, la trajectoire est circulaire
pour L∗ = 0, puisqu’alors r = r0 et ẇ = 0 ; L ∗ = 0 correspond à une position d’équilibre (dans
R ∗). Un développement de Taylor de l’énergie potentielle autour de E0 montre que l’équilibre est
stable puisque les mouvements dans le voisinage de r = r 0 sont sinusoïdaux (cf. chapitre 5).
Ep,ef
∗
Em
0
∗
Em
E0
r0
r
∗
Em
∗
Em
∗
Em
0
E0
∗
Em
F IG . 13.4.
Ep,ef
r0
r max
rmin
r
F IG . 13.5.
b) Barrière d’énergie potentielle
c Dunod – Toute reproduction non autorisée est un délit
Si l’énergie potentielle effective passe par un maximum puis tend vers 0 lorsque r devient très
grand, plusieurs cas se présentent (Fig. 13.5) :
i) E ∗m 0 : r oscille entre 0 et rmax .
ii) 0 < Em∗ < E 0 : là, deux solutions exclusives peuvent convenir, 0 r rmax et rmin r < ∞.
À la première correspond un état lié, à la seconde un état libre.
iii) Em∗ E 0 : la coordonnée radiale r peut prendre toutes les valeurs comprises entre 0 et ∞.
L’état est libre. L’égalité Em∗ = E0 correspond à une position d’équilibre instable car un développement de Taylor de l’énergie potentielle autour de E0 montrerait que tout écart à la position d’équilibre
augmente (cf. chapitre 5).
Remarque : En quantique, les deux solutions du cas ii) ne sont pas exclusives. L’objet physique ponctuel, d’énergie déterminée comprise entre 0 et E0 , peut alors « passer » d’un état lié à un
état libre de même énergie. C’est l’effet tunnel dont le nom imagé traduit le franchissement d’une « montagne » d’énergie potentielle (cf. Quantique).
Ainsi, dans les deux cas, puits et barrière d’énergie potentielle, peuvent exister des états libres et
des états liés.
226
13. Système de corps ponctuels en interaction. Problème à deux corps
II . 7 . — Retour sur le problème de Kepler
On simplifie considérablement l’analyse du mouvement de N corps en interaction, le Soleil et
les N − 1 planètes, en le ramenant à celui de N − 1 problèmes indépendants à deux corps dont l’un
est le Soleil ; l’influence des autres planètes se traite alors comme une simple perturbation. Rappelons
l’expression de la force attractive de gravitation exercée par A 2 sur A1 :
F1 =
K
er
r2
avec
er =
r
A 2A1
=
r
r
la constante d’interaction étant négative en gravitation, K= −Gm1m 2, et positive ou négative en électrostatique, K = q1q2/(4pε 0).
a) Interprétation des lois de Kepler
On interprète aisément les trois lois de Kepler en assimilant, en première approximation, une planète à un corps ponctuel, de masse Mp, soumis à la force de gravitation solaire dans le référentiel de
Copernic.
i) Le centre de la planète décrit une ellipse dont l’un des foyers est occupé par le centre de masse.
En raison du faible rapport M p MS des masses planétaire et solaire (même Jupiter n’a qu’une masse
égale à 0, 001 de la masse du Soleil), la masse réduite est, avec une excellente approximation, égale à
la masse de la planète :
Mp MS
Mp
≈ Mp
m=
=
1 + Mp /MS
M p + MS
Le centre du Soleil coïncide pratiquement avec le centre de masse et le centre de la planète avec le point
fictif A :
−Mp
MS
CA 1 =
CA ≈ CA et CA 2 =
CA ≈ 0
M p + MS
Mp + MS
ii) La deuxième loi n’est que l’expression de la conservation du moment cinétique :
mr 2ẇ = Cte
soit
r 2ẇ = Cte
iii) Quant à la troisième loi, elle découle directement de l’expression de la période (cf. chapitre 12) :
4p2m
4p2
T2
=
=
a3
|K |
(M p + MS )G
soit
4p2
T2
≈
a3
GMS
b) Vitesse d’évasion et vitesse de satellisation d’une planète
Pour obtenir l’expression rigoureuse de la vitesse de libération ou d’évasion, il suffit de remplacer
la masse Mp de la planète par la masse réduite m = M p MS /(Mp + M S) dans l’expression de l’énergie
mécanique de la particule A (cf. chapitre 12). On trouve :
1
|K |
=0
Em = mv 2l −
2
r
d’où
2G(MS + Mp )
vl =
r
1/2
≈
2GM S
r
Calculons la vitesse d’évasion de la Terre sur son orbite :
r = 1, 49 × 1011 m
Ms = 2 × 1030 kg
d’où
v l ≈ 42 km . s −1
1/2
227
Système de corps ponctuels en interaction. Problème à deux corps
De même, la vitesse de satellisation s’obtient en appliquant la loi fondamentale de la dynamique à la
particule de masse m. On trouve aisément (cf. chapitre 12) :
G(MS + Mp)
vs =
r
1/2
1/2
GMS
r
≈
La vitesse de satellisation de la Terre sur son orbite est donc : v s ≈ v l/1, 414 ≈ 30 km . s −1.
III . — DYNAMIQUE DES SYSTÈMES DE CORPS PONCTUELS
III . 1 . — Forces extérieures et forces intérieures à un système
Considérons un système déformable S d de N corps ponctuels, en mouvement par rapport à un
référentiel R galiléen (Fig. 13.1). L’un de ces points A i est soumis à la force Fi exercée par l’ensemble
des autres corps de Sd et par des corps extérieurs à Sd . Si le référentiel considéré n’est pas galiléen,
on doit ajouter les forces d’inertie d’entraînement et de Coriolis (cf. chapitre 7).
La force F i qui agit sur le corps ponctuel A i est la somme de deux contributions :
i) l’une F ex→i due à tout corps étranger à S d ; c’est une force extérieure ;
ii) l’autre
j
Fj→i due à tout corps de Sd distinct de Ai ; c’est une force intérieure.
III . 2 . — Théorème de la quantité de mouvement
Appliquons, par rapport à un référentiel galiléen, la loi fondamentale à chaque corps ponctuel A i :
d pi
= F ex→i +
Fj→i
dt
j=i
En sommant sur tous les points i de Sd , il vient :
c Dunod – Toute reproduction non autorisée est un délit
où :
i
d pi
=
dt
P=
pi
Fex→i +
i
F j→i soit
i
Sex =
i
j=i
Fex→i
dP
= Sex + Sin
dt
et Sin =
i
F j→i
i
j=i
désignent respectivement la quantité de mouvement totale du système, la somme des forces extérieures
et la somme des forces intérieures. Notons que la quantité de mouvement d’un système est une grandeur
vectorielle additive : elle est égale à la somme des quantités de mouvement de ses parties, même en
présence d’interaction.
a) Propriété fondamentale de la somme des forces intérieures
En raison de la troisième loi de Newton (cf. chapitre 4), on a :
F i→j + Fj→i = 0
d’où
S in =
F j→i = 0
i
j=i
228
13. Système de corps ponctuels en interaction. Problème à deux corps
b) Énoncé du théorème
La somme des forces intérieures étant nulle, la quantité de mouvement d’un système matériel,
soumis aussi à des forces extérieures, satisfait au théorème de la quantité de mouvement :
dP
= S ex
dt
Par rapport à un référentiel galiléen, la dérivée par rapport au temps de la quantité de mouvement est
égale à la somme des forces extérieures.
Ce théorème, de portée générale, est connu sous d’autres noms, car la quantité de mouvement
est aussi appelée moment linéaire en mécanique analytique, impulsion et même somme cinétique dans
certains exposés formels.
On le désigne souvent par théorème du centre de masse, en mécanique de Newton, car l’équation vectorielle fait apparaître explicitement le centre de masse C . En effet, puisque P = Mv C :
MaC = S ex
Précisons que, si les composantes du vecteur P sont relatives à une base non galiléenne, il sera nécessaire de procéder à une composition des dérivations de Bour (cf. chapitre 3).
Ajoutons que la variation d P de la quantité de mouvement, entre les instants t et t +d t , concerne
les mêmes corps appartenant à un système fermé, c’est-à-dire qui n’échange pas de matière avec le milieu
extérieur (cf. chapitre 22).
Remarque : Le centre de masse C n’est pas nécessairement matériel ; par exemple, celui associé à
deux points A 1 et A2 , de même masse, se trouve à chaque instant au milieu du segment
qui les joint. Son mouvement est celui d’un point géométrique, doté de la masse totale et
soumis à une force égale à la somme des forces.
c) Caractère conservatif de la quantité de mouvement
Le théorème de la quantité de mouvement d’un système matériel fermé peut être exprimé en termes
de bilan de la quantité de mouvement, comme on le fait couramment en thermodynamique pour des
grandeurs extensives, c’est-à-dire des grandeurs qui dépendent de la taille des systèmes (cf. Thermodynamique). La variation d P de la quantité de mouvement du système, entre les instants voisins t et
t + d t , est a priori la somme de deux contributions : la première, celle liée à l’échange avec le milieu extérieur, ou quantité de mouvement élémentaire reçue (algébriquement) dP(r) , la seconde liée à
une éventuelle création ou production dP (c) .
On a donc, entre deux instants infiniment voisins t et t + d t :
d P = dP (r) + dP(c)
avec
dP r = Sex d t
et
dP(c) = 0
car la comparaison avec le théorème de la quantité de mouvement permet d’identifier l’échange à
S ex d t ; le terme de création de la quantité de mouvement est toujours nul : on dit que la quantité
de mouvement est une grandeur conservative.
d) Condition de conservation de la quantité de mouvement
En intégrant l’équation-bilan précédente entre deux instants quelconques t i et t f , on obtient :
tf
DP = P (r) =
ti
S ex d t
229
Système de corps ponctuels en interaction. Problème à deux corps
La quantité de mouvement P d’un système matériel se conserve si la somme des forces extérieures est
nulle, c’est-à-dire :
i) si le système est isolé (pas de forces extérieures),
ii) ou si le système est pseudo-isolé (forces extérieures dont la somme vectorielle est nulle).
e) Exemples
(1) Problème à deux corps
Dans le problème à deux corps, les deux éléments, qui forment un système isolé, ont des quantités
de mouvement opposées dans le référentiel du centre de masse R∗ . Dans le référentiel du laboratoire
R , la somme des quantités de mouvement est un vecteur constant.
(2) Collisions
L’étude des collisions de particules, élastiques et inélastiques suivant que le nombre et la nature des
particules sont inchangés ou non, fournit un autre exemple important de système pouvant être considéré
comme isolé (cf. chapitre 14).
III . 3 . — Théorème du moment cinétique
a) Propriété fondamentale du moment des forces intérieures
Appliquons, par rapport à un référentiel galiléen, en un point fixe O , le théorème du moment
cinétique à chaque corps ponctuel Ai :
d LO,i
= OAi × Fex→i + OAi ×
dt
Fj→i
j=i
En sommant sur tous les points i , il vient :
d LO,i
=
dt
i
i
OAi × F ex→i +
i
OAi ×
F j→i
soit
j=i
d LO
= MO,ex + MO,in
dt
c Dunod – Toute reproduction non autorisée est un délit
où :
LO =
LO,i
MO,ex =
i
i
OAi × Fex→i
et M O,in =
i
OA i ×
Fj→i
j=i
désignent respectivement le moment cinétique total du système, la somme des moments des forces extérieures et la somme des moments des forces intérieures. Notons que, comme la quantité de mouvement,
le moment cinétique est une grandeur vectorielle additive.
En raison de l’opposition des actions réciproques (troisième loi de Newton), il vient :
MO,in =
ij
OAi × F j→i =
couple(ij)
OA i × F j→i + OAj × Fi→j =
(OAi − OAj ) × F j→i
couple(ij)
puisque Fi→j = −Fj→i . Comme la force d’interaction est portée par le vecteur A jA i = OAi − OAj ,
les différents produits vectoriels de la somme sont nuls. Il en résulte que :
M O,in = 0
230
13. Système de corps ponctuels en interaction. Problème à deux corps
b) Énoncé du théorème
Le moment des forces intérieures étant nul, le mouvement d’un système matériel, soumis à des
forces extérieures, satisfait au théorème du moment cinétique :
d LO
= MO,ex
dt
Par rapport à un référentiel galiléen, la dérivée par rapport au temps du moment cinétique, en un point
fixe O , est égale au moment en ce point des forces extérieures.
Comme pour la quantité de mouvement, si le référentiel n’est pas galiléen, il faut ajouter les moments des forces d’inertie d’entraînement et de Coriolis :
MO,ie =
i
OAi × (−m iae,i)
et M O,iC =
i
OAi × (−mi a C,i)
En outre, il faudra dériver le vecteur LO par rapport au temps, relativement au référentiel considéré. Si
les composantes de ce vecteur sont relatives à une autre base, on utilisera la composition des dérivations
de Bour (cf. chapitre 3). Enfin, comme le théorème de la quantité de mouvement, le théorème du moment
cinétique suppose que les systèmes considérés soient fermés (cf. chapitre 22).
c) Caractère conservatif du moment cinétique
Comme le théorème de la quantité de mouvement, le théorème du moment cinétique d’un système
matériel fermé peut être récrit en termes de bilan de moment cinétique. La variation d L O du moment
cinétique du système, entre les instants voisins t et t +d t , est a priori la somme de deux contributions :
(r)
la première liée à l’échange avec le milieu extérieur, ou moment cinétique reçu (algébriquement) dL O ,
(c)
la seconde liée à une éventuelle création dL O :
d L O = dL (Or) + dL(Oc) avec
dL (Or) =
M0,ex d t
et
dL(Oc) = 0
car la comparaison avec le théorème du moment cinétique permet d’identifier l’échange à M O,ex d t et
d’affirmer que le moment cinétique est une grandeur conservative.
d) Condition de conservation du moment cinétique
Si l’on intègre l’équation-bilan précédente du moment cinétique entre deux instants quelconques
ti et tf , on obtient :
DLO = L(Or) =
tf
ti
M O,ex d t
Le moment cinétique LO d’un système matériel se conserve si la somme des moments des forces
extérieures est nulle, c’est-à-dire :
i) si le système est isolé (pas de moments de forces extérieures),
ii) si le système est pseudo-isolé (somme vectorielle des moments des forces extérieures nulle).
e) Exemples
(1) Problème à deux corps
Le système formé par l’ensemble des deux corps ponctuels est isolé. Par rapport au référentiel du
centre de masse, qui est galiléen, son moment cinétique est donc une constante vectorielle (Fig. 13.6a).
231
Système de corps ponctuels en interaction. Problème à deux corps
..
..
A
y
A
A1
Ωf > Ωi
w
C
A
.
Ωi
ri Ai
...
A2
A1
x
Plan du mouvement
LC
2
a)
b)
F IG . 13.6.
(2) Effondrement gravitationnel d’une étoile
On peut assimiler une étoile à une distribution sphérique de matière formant un système isolé en
rotation autour d’un axe ; par exemple le Soleil est une distribution de masse sphérique qui effectue une
rotation complète autour de l’un de ses axes en 25 jours environ. Au fur et à mesure que l’étoile se
contracte du fait de l’attraction gravitationnelle, la conservation du moment cinétique en son centre O
provoque une augmentation de la vitesse de rotation V autour d’un axe (Fig. 13.6b). En effet :
LO =
i
OA i × m iv i =
i
ri er,i × mi (ṙi er,i + r iV ew,i ) =
mi r2i V e z
i
2
r i étant la distance du point A i à l’axe de rotation. Comme la quantité
i mi ri diminue au cours de
l’effondrement, la rotation augmente. L’effondrement radial peut provoquer une très forte augmentation
de la vitesse de rotation. C’est ce qui a été observé sur les pulsars, objets célestes caractérisés par un
rayonnement électromagnétique, intense et fortement pulsé.
IV . — ÉNERGÉTIQUE DES SYSTÈMES DE N CORPS PONCTUELS
c Dunod – Toute reproduction non autorisée est un délit
IV . 1 . — Théorème de l’énergie cinétique
Appliquons le théorème de l’énergie cinétique à chaque corpuscule A i :
d E k,i
= Pex→i +
dt
Pj→i
j=i
P ex→i étant la puissance des forces extérieures au système qui s’exercent sur le Ai et
puissance des forces intérieures au système qui s’exercent sur ce corps.
j=i P j→i
la
En sommant sur tous les corps i , on obtient :
i
d Ek,i
d i Ek,i
d Ek
=
=
=
dt
dt
dt
i
Pex→i +
i
j=i
P j→i
où
Ek =
i
Ek,i
est l’énergie cinétique du système. Ainsi définie, l’énergie cinétique d’un système est une grandeur
additive.
232
13. Système de corps ponctuels en interaction. Problème à deux corps
Désignons par Pex et Pin la puissance totale des forces extérieures et la puissance totale des forces
intérieures, respectivement :
Ek =
i
Ek,i
P ex =
i
P ex→i et P in =
i
j=i
P j→i
Cette puissance des forces intérieures s’explicite selon :
Pin =
i,j
Fj→i · vi =
couple(ij)
Fj→i · vi + F i→j · v j =
couple(ij)
Fj→i · (v i − v j )
en tenant compte de l’opposition des actions réciproques. On en déduit le travail élémentaires des forces
intérieures :
dWin = P in d t =
Fj→i · d(ri − rj ) =
Fj→i · d rij
couple(ij)
couple(ij)
en posant ri − r j = r ij . Or la force Fj→i est portée par le vecteur r ij . Par conséquent :
Fj→i
dWin =
couple(ij)
r ij
· d rij
r ij
soit
Fj→i d rij
dWin =
couple(ij)
puisque rij d rij = r ij d r ij . Ainsi, le travail élémentaire et donc la puissance des forces intérieures sont
en général non nuls à moins que les distances entre les différents points matériels demeurent constantes.
a) Énoncé du théorème
On déduit de ce qui précède :
d Ek
= Pex + P in
dt
Par rapport à un référentiel galiléen, la dérivée par rapport au temps de l’énergie cinétique d’un système
est égale à la somme des puissances de toutes les forces, extérieures et intérieures.
En introduisant les travaux élémentaires des forces extérieures et intérieures, dW ex = Pex d t et
dWin = P in d t , l’équation précédente s’écrit aussi :
d Ek = dW ex + dWin
ce qui donne, en intégrant entre deux dates quelconques :
DEk = W ex + W in
La variation d’énergie cinétique est égale à la somme des travaux des forces extérieures et des forces
intérieures.
Si le référentiel n’est pas galiléen, il faut ajouter la contribution des forces d’inertie d’entraînement,
−m
i ae,i · vi , celle de la force de Coriolis étant nulle. En outre, ce théorème suppose que les systèmes
i
considérés sont fermés.
Système de corps ponctuels en interaction. Problème à deux corps
233
b) Caractère non conservatif de l’énergie cinétique
Comme les deux précédents théorèmes de dynamique, le théorème de l’énergie cinétique d’un
système matériel fermé peut être interprété en termes de bilan d’énergie cinétique. La variation d E k de
l’énergie cinétique du système, entre les instants voisins t et t+d t , est la somme de deux contributions :
(r)
la première liée à l’échange avec le milieu extérieur, ou énergie cinétique reçue (algébriquement) dE k ,
(c)
la seconde liée à la création ou production dEk :
(r)
(c)
d Ek = dE k + dE k
La comparaison avec le théorème de l’énergie cinétique permet d’identifier l’échange à l’influence des
forces extérieures par dWex , et la création à celle des forces intérieures par dW in . On peut ainsi affirmer
que l’énergie cinétique n’est pas une grandeur conservative :
dE (kc) = dW in
(r)
(c)
A priori, dW in = 0 . En intégrant entre deux dates quelconques t i et t f , on obtient : DEk = Ek +Ek .
c) Cas d’un système isolé
Dans le cas où le système est isolé, le théorème précédent se réduit, puisque dW ex = 0 , à :
d E k = dWin
soit
DEk = Win
en intégrant. Ainsi, contrairement à la quantité de mouvement et au moment cinétique, l’énergie cinétique d’un système isolé ne se conserve pas. Elle ne se conserve que si le travail des forces intérieures
est nul.
IV . 2 . — Théorème de l’énergie mécanique
c Dunod – Toute reproduction non autorisée est un délit
a) Énergie potentielle
Certaines forces extérieures et intérieures sont telles que leurs travaux ne dépendent pas du chemin
suivi par les points d’application. Ces travaux élémentaires peuvent alors s’écrire sous la forme de
différentielles de fonctions appelées énergies potentielles (cf. chapitre 5) :
dWex = − d Ep,ex et dWin = − d E p,in
b) Énergie mécanique
Par définition, on appelle énergie mécanique d’un système S d la somme de son énergie cinétique
et de son énergie potentielle des forces extérieures et intérieures :
Em = Ek + Ep
avec
Ep = Ep,ex + Ep,in
Notons que, contrairement à l’énergie cinétique, l’énergie mécanique n’est pas une grandeur additive,
en raison de l’énergie potentielle d’interaction.
234
13. Système de corps ponctuels en interaction. Problème à deux corps
c) Théorème de l’énergie mécanique
Distinguons, parmi les forces qui s’exercent sur un système, celles qui dérivent d’une énergie potentielle des autres. Les travaux élémentaires des forces extérieures et intérieures peuvent se mettre sous
la forme :
dW ex = − d Ep,ex + dW (exnc) et dWin = − d E p,in + dWin(nc)
(nc)
(nc)
où dWex , dWin désignent les travaux élémentaires des forces qui ne dérivent pas d’une énergie
potentielle. En remplaçant dans l’expression du théorème de l’énergie cinétique, il vient :
d Ek
d Ep,ex
d E p,in
=−
+ P (exnc) −
+ Pin(nc) soit
dt
dt
dt
On obtient ainsi le théorème de l’énergie mécanique :
d Em
= P(exnc) + P(innc)
dt
ou
d
(nc)
(E k + Ep,ex + Ep,in) = P ex
+ P (innc)
dt
d Em = dW (exnc) + dWin(nc)
en introduisant les travaux élémentaires correspondants. En intégrant entre deux dates quelconques, on
trouve évidemment :
DEm = W (exnc) + Win(nc)
La variation d’énergie mécanique est égale à la somme des travaux des forces extérieures et intérieures
qui ne dérivent pas d’une énergie potentielle.
d) Caractère non conservatif de l’énergie mécanique
Interprétons le théorème de l’énergie mécanique en terme de bilan. On a, comme pour l’énergie
cinétique :
d Em = dE (mr) + dE m(c) soit DEm = Em(r) + Em(c)
(nc)
en intégrant. On identifie l’échange d’énergie mécanique au travail dW ex des forces extérieures non
(nc)
conservatives, et la création ou la production au travail dWin des forces intérieures non conservatives.
Comme l’énergie cinétique, l’énergie mécanique n’est pas une grandeur conservative :
dEm(c) = dWin(nc)
C’est précisément la recherche d’une grandeur énergétique conservative qui a conduit à postuler le
premier principe de la thermodynamique (cf. Thermodynamique).
e) Cas d’un système isolé
L’énergie mécanique d’un système isolé ne se conserve pas en général, puisque l’on a :
DEm = W nc
in = 0
f) Exemples
i) Problème à deux corps
Dans le problème à deux corps, l’énergie mécanique dans le référentiel du centre de masse se
conserve, précisément parce que les forces d’interaction sont conservatives.
ii) Système isolé avec forces intérieures de frottement
Pour un système soumis à des forces intérieures de frottement, l’énergie mécanique diminue car le
travail des forces de frottement est toujours négatif.
Système de corps ponctuels en interaction. Problème à deux corps
235
IV . 3 . — Théorème du viriel
Ce théorème a été établi par le physicien allemand R. Clausius en 1870 (cf. Thermodynamique). Il
fournit une expression de la valeur moyenne dans le temps de l’énergie cinétique d’un système déformable Sd de N particules.
a) Définition du viriel
Écrivons l’énergie cinétique de S d sous la forme suivante :
Ek =
1
2
miv2i =
i
soit :
Ek = −
1
2
1
2
1
d ri
=
dt
2
i
pi ·
i
Fi · r i +
d(pi · r i )
d pi
− ri ·
dt
dt
i
1 d
2 dt
i
pi · r i
La valeur moyenne dans le temps de l’énergie cinétique, E k , fait apparaître deux termes :
i) le premier appelé le viriel (de même origine que virilité qui signifie force)
=−
1
2
i
Fi · ri
ii) le second
1 d
2 dt
p i · ri
i
Montrons que ce second terme est nul. Pour une durée T tendant vers l’infini, la moyenne de la fonction :
dG
pi · r i
avec G =
g=
dt
i
a pour expression :
g = lim
c Dunod – Toute reproduction non autorisée est un délit
T→∞
1
T
T
0
g d t = lim
T→∞
1
T
T
0
dG
1
d t = lim [G(T ) − G(0)]
T→∞ T
dt
Comme les valeurs de {r i} et {pi } sont finies, les premières parce que le système est localisé, les
secondes parce que les vitesses sont inférieures à la vitesse de la lumière, la différence G(T ) − G(0)
est bornée. Il en résulte :
d
p i · ri = 0
dt
i
b) Énoncé du théorème
Finalement, on a :
Ek =
avec
=−
1
2
i
Fi · ri
La valeur moyenne dans le temps de l’énergie cinétique d’un système de particules est égale au viriel
de toutes les forces
236
13. Système de corps ponctuels en interaction. Problème à deux corps
Si on distingue les forces extérieures au système des forces intérieures, on obtient évidemment :
Ek =
ex
ex
+
in
avec
ex
=−
1
2
étant le viriel des forces extérieures et
Fex→i · r i
i
in
et
in
=−
1
2
i
j=i
Fj→i · r i
le viriel des forces intérieures.
Remarque : Il existe une autre définition du viriel, largement répandue, dans laquelle ne figure pas le
facteur (−1/2) . Nous avons préféré adopter celle proposée par Clausius lui-même.
c) Exemples
(1) Gaz parfait
Dans le cas d’un gaz parfait, que l’on définit comme un ensemble de particules dont on peut négliger les interactions, en dehors des chocs (cf. Thermodynamique), le viriel se réduit à celui des forces
extérieures, c’est-à-dire à celui des forces de pression :
in
=0
ex
=−
1
2
i
Fex→i · ri
d’où
Ek =
ex
On montre que ex s’exprime simplement en fonction de la pression et du volume pour un gaz parfait
(cf. Thermodynamique) :
ex
=
3pV
2
d’où
pV =
2Ek
3
Pour un gaz réel, caractérisé par des forces d’interaction entre particules, il faut ajouter au viriel des
forces extérieures un viriel non nul des forces intérieures.
(2) Système de deux particules en interaction harmonique
Pour deux particules en interaction harmonique, on a : F 2→1 = −Kr avec r = r 1 − r2 et
F1→2 = Kr. D’après l’opposition des actions réciproques, F in = F2→1 + F 1→2 = 0 , il vient :
Ek = −
F2→1 · r1 + F 1→2 · r2
F 2→1 · r Kr 2
=−
=
2
2
2
La quantité Kr2/2 représente l’énergie potentielle associée à ces forces d’interaction, puisque :
dW = F2→1 · d r 1 + F1→2 · d r 2 = F 2→1 · d r = −Kr · d r = −Kr d r = − d E p
avec
si on adopte la convention E p = 0 pour r = 0 . Il en résulte que :
Ek = Ep
(3) Système de deux particules en interaction newtonienne
Dans ce cas, F 2→1 = (K /r 2 ) er avec K < 0 , r = r1 − r 2 et er = r/r . Donc :
Ek = −
1 K
K
F2→1 · r
=− 2r=−
2
2 r
2r
Ep =
Kr 2
2
237
Système de corps ponctuels en interaction. Problème à deux corps
La quantité K /r représente l’énergie potentielle d’interaction puisque :
dW = F2→1 · d r1 + F 1→2 · d r 2 = F 2→1 · d r =
K
K
er · d r = 2 d r = − d Ep
2
r
r
avec E p =
K
r
si on adopte la convention E p = 0 pour r infini. Il en résulte que :
2Ek + Ep = 0
d’où
Em = Ek + Ep =
1
Ep = −E k
2
Ce résultat se généralise au cas de N particules en interaction newtonienne.
V . — INTERACTION GRAVITATIONNELLE À N CORPS
Le problème de Kepler à N corps, précisément à N corps ponctuels, a fait l’objet de très nombreuses publications depuis 1750, dont plusieurs signées par de très grands mathématiciens.
V . 1 . — Équations du mouvement
Pour un tel système déformable S d, supposé isolé, la quantité de mouvement P et le moment cinétique au centre de masse LC sont des constantes vectorielles ; en outre, comme les forces de gravitation
sont conservatives, l’énergie mécanique Em est aussi une constante :
P = Cte
LC = Cte
et
Em = E k + Ep = Cte
c Dunod – Toute reproduction non autorisée est un délit
En explicitant, on obtient sept équations scalaires, trois par équation vectorielle et une par équation
scalaire.
Dans le cas de deux corps, le nombre de degrés de liberté est six ; aussi les équations précédentes permettent-elles de déterminer le mouvement, comme on l’a vu précédemment. En revanche,
si le nombre de points est supérieur à deux, il n’y a pas de solution générale. On se ramène, lorsqu’on le
peut, à un problème à deux corps perturbé par un troisième ; c’est ce que fit Le Verrier avec le mouvement d’Uranus perturbé par Neptune. Cependant, le problème à trois corps ponctuels, qui a neuf degrés
de liberté, ne peut être résolu que s’il existe des équations supplémentaires traduisant des conditions particulières. C’est le cas si les trois corps sont alignés ou s’ils forment un triangle équilatéral. C’est ce dernier cas qui est le plus intéressant.
V . 2 . — Points de Lagrange
Considérons un système de trois corps ponctuels, A 1, A2 et A3 , de masses respectives m1 , m 2 et
m3, formant un triangle rigide S , qui tourne à vitesse angulaire constante V , autour d’une direction
normale au plan du triangle, par rapport au référentiel galiléen lié aux étoiles (Fig. 13.7a).
Dans le référentiel du centre de masse R ∗ , galiléen aussi puisque le système est isolé, le mouvement de A 1 satisfait à la loi fondamentale. On a donc :
m1a 1 = G
m1 m 2
m 1 m3
r12 + G 3 r13
3
r12
r13
238
13. Système de corps ponctuels en interaction. Problème à deux corps
L 4 Achille
y
A3
A1
ro
C
A3
π/3
x
Soleil
A2
S
Jupiter
A1
ro
ro
A2
A 3
L 5 Patrocle
b)
a)
F IG . 13.7.
avec r12 = r 1 − r2, r 13 = r 1 − r3 et a 1 = −V 2 r1, puisque le triangle rigide a un mouvement de
rotation uniforme par rapport à R∗ . Comme m 1 r1 + m2 r2 + m3 r3 = 0, d’après la définition du centre
de masse, l’équation du mouvement donne, en éliminant le vecteur r 3 :
m2
1
r 312
−
1
r313
r2 =
m1
m2
m3 V 2
−
+
+
3
G
r313
r312
r13
r1
Les vecteurs r1 et r 3 n’étant pas colinéaires, l’égalité n’est possible que si les deux membres de
l’équation sont nuls, ce qui implique r12 = r 13. En procédant de la même façon avec A 2, on obtiendrait
aussi r21 = r23 . Il en résulte que :
r 12 = r 13 = r23 = r0 et V 2 =
GM
r 30
avec
M = m1 + m2 + m3
Les deux positions L4 et L5 du corps A3 , de part et d’autre de la droite A 1A 2 et à la même distance
de A1 et A 2, sont appelées depuis 1772, date de leur prévision par J. Lagrange, les points de Lagrange
(Fig. 13.7b). On montre que ces points correspondent à des positions d’équilibre. Aussi a-t-on envisagé
de les utiliser dans le système Terre-Lune pour y placer des stations orbitales. Dans le cas du système
Soleil-Jupiter, on sait depuis 1906 que l’un des points de Lagrange est occupé par l’astéroïde Achille
et l’autre par l’astéroïde Patrocle ; en réalité, de nombreux astéroïdes, appelées planètes troyennes, se
partagent ces positions de Lagrange.
CONCLUSION
Retenons les points importants.
(1) Dans le référentiel du centre de masse R ∗ , l’étude du système à deux corps ponctuels se réduit
à celle du mouvement d’une seule particule fictive A, de masse m = m1 m2/(m 1 + m2). Cette particule
est soumise de la part du centre de masse du système à la force d’interaction F 2→1 .
(2) Il est avantageux d’exploiter les conservations occasionnelles du moment cinétique et de l’énergie mécanique, non seulement pour établir l’équation différentielle du mouvement, mais aussi pour discuter qualitativement de la nature du mouvement. Cette discussion, indispensable si l’information sur
l’interaction n’est que partielle, est physiquement enrichissante, même dans les problèmes connus tels
que celui de Kepler (cf. chapitre 12).
239
Système de corps ponctuels en interaction. Problème à deux corps
(3) Le mouvement d’un système matériel déformable Sd satisfait aux trois théorèmes généraux de
la mécanique suivants :
dP
= Sex
dt
d LO
= M O,ex
dt
d Ek
= P ex + P in
dt
et
Notons que les deux premiers ne font intervenir que les actions extérieures, contrairement au troisième. Il
est préférable, à la fois sur les plans conceptuel et technique, d’écrire ce dernier théorème sous une forme
différentielle, en faisant apparaître l’énergie mécanique Em et le travail des forces non conservatives :
d Em = dW (exnc) + dWin(nc)
avec
Em = E k + E p,ex + E p,in
(4) Alors que la quantité de mouvement et le moment cinétique de tout système sont des grandeurs
conservatives, c’est-à-dire telles que le terme de création est toujours nul, les grandeurs énergétiques de
la mécanique que sont l’énergie cinétique et l’énergie mécanique ne sont pas conservatives.
(5) Si le système S d est isolé, on a :
P = Cte
LO = Cte
DEm = W(innc) = 0
mais
La thermodynamique étendra le concept d’énergie mécanique, en postulant l’existence d’une grandeur
énergétique conservative. C’est le premier principe de la thermodynamique (cf. Thermodynamique).
(6) Enfin, rappelons le théorème du viriel donnant la valeur moyenne dans le temps de l’énergie
cinétique d’un système Sd de particules :
Ek =
avec
=−
1
2
i
Fi · ri
Ce théorème est surtout utile en thermodynamique et en astrophysique.
EXERCICES ET PROBLÈMES
c Dunod – Toute reproduction non autorisée est un délit
P13– 1. Système de trois particules
On considère un système constitué de trois particules A1 , A2 et A3 , de masses respectives en
kilogramme 0, 2, 0, 3 et 0, 5 kg. Les positions en mètre de ces points par rapport à l’origine O d’un
référentiel galiléen sont les suivantes :
r1 = 2t ex − 3 e y + t2 ez
r2 = (t + 1) ex + 3t ey − 4 ez
et r3 = t 2 ex − te y + (2t − 1)ez
t désignant la durée en seconde.
1. Trouver la quantité de mouvement du système. Comment varie le centre de masse au cours du
temps ? Le système est-il isolé ? Calculer la somme des forces extérieures qui s’exercent éventuellement
sur un tel système.
2. Quel est, en fonction du temps, le moment cinétique du système en O ? En déduire le moment
des forces extérieures en O.
3. Donner la variation de l’énergie cinétique du système au cours du temps. En déduire la puissance
de toutes les forces qui s’exercent sur le système, ainsi que le travail total entre les dates 0 et 1 s.
240
13. Système de corps ponctuels en interaction. Problème à deux corps
P13– 2. Conservation de l’énergie et invariance temporelle
On considère le système isolé constitué de deux particules A 1 et A 2. L’énergie potentielle d’interaction est une fonction Ep des positions de A1 et A2 et ne dépend pas explicitement du temps.
1. Exprimer, en fonction de E p, les forces F1 et F 2 qui s’exercent sur A1 et A 2 respectivement.
2. En déduire les expressions correspondantes des variations élémentaires d E k et d P de l’énergie
cinétique totale et de la quantité de mouvement totale, pendant la durée infinitésimale d t.
3. La condition E p stationnaire se traduit par ∂E p /∂t = 0. Montrer que cette invariance de Ep ,
par changement de l’origine des temps, entraîne une conséquence physique importante pour la grandeur
E m = Ek + Ep.
P13– 3. Atome de positronium
Le positronium est un atome constitué d’un électron A 1 (masse me , charge −e) en interaction
avec un positron A 2, antiparticule de l’électron, dont la masse est m e et la charge e. Il a été découvert
en 1949 par le physicien allemand M. Deutsch (cf. Quantique). On désigne par R le référentiel du
laboratoire par rapport auquel on étudie le mouvement d’un tel système que l’on peut considérer comme
isolé.
1. Définir le référentiel du centre de masse R ∗ associé au système. Ce référentiel est-il galiléen ?
Justifier.
2. a) Montrer que l’énergie potentielle d’interaction électrostatique entre A 1 et A 2 a pour expression : Ep = K , r, où K est une constante que l’on exprimera en fonction des constantes physiques
du système. On précisera la convention adoptée pour l’origine de l’énergie potentielle et on commenter le signe de K.
b) Calculer, eV, l’énergie potentielle, pour r = 106 pm.
c) Même question pour l’énergie potentielle d’interaction gravitationnelle entre les deux particules ? Conclure.
3. Dans R∗ , le mouvement de l’électron et du positron s’obtiennent à partir de celui d’une seule
particule fictive A soumise à la force d’interaction.
a) Quelle est la masse de A ? Pourquoi le mouvement de A est-il plan ?
b) Comment déduit-on les mouvements de A 1 et A2 dans R∗ de celui de A dans le même
référentiel ?
4. a) À l’aide de la loi fondamentale de la dynamique appliquée à la particule A, en mouvement
circulaire autour du centre de masse, établir l’expression, en fonction de r, de l’énergie cinétique E k∗
du système dans R∗.
b) Comparer cette énergie cinétique à l’énergie potentielle et à l’énergie totale du positronium dans
R ∗. En déduire les valeurs de Ek∗ et E ∗m pour r = 106 pm.
c) Sachant que toute particule chargée accélérée rayonne de l’énergie sous forme électromagnétique, comment varient Em∗ , E p(r) et E k∗ (r) ? La variation de Ek∗ surprend. Pourquoi ? Celle de E m∗ a
conduit à l’abandon de la physique newtonienne à l’échelle microscopique. Pourquoi ?
241
Système de corps ponctuels en interaction. Problème à deux corps
P13– 4. Vibrations de la molécule HCL
On étudie les mouvements relatifs des atomes d’hydrogène et de chlore de la molécule de HCl
dans le référentiel du centre de masse R∗ de cette molécule. On admet que les forces d’interaction
dépendent de la seule énergie potentielle E p(r), r étant la distance entre les atomes H et Cl.
1. Établir l’équation du mouvement radial de cette molécule, c’est-à-dire suivant r la distance
r entre les atomes H et Cl, à partir de deux intégrales premières. On introduira l’énergie potentielle
effective Ep,ef = Ep (r) + L2 /(2mr2 ), L étant la norme du moment cinétique et m la masse réduite
des deux atomes.
2. Sachant que Ep,ef passe par un minimum pour r = r0 = 0, 126 nm (Fig. 13.8), quelle est, au
voisinage de la position d’équilibre, l’expression de la force d’interaction entre H et Cl ? En déduire la
nature du mouvement.
3. Les mesures spectroscopiques permettent de déterminer la fréquence de vibration de la molécule
de HCl : f0 = 0, 857×10 14 Hz. Sachant que les masses de H et Cl sont respectivement 1, 67 × 10 −27 kg
et 59, 4 × 10−27 kg, calculer la constante K caractéristique de cette vibration.
Ep,ef
O
Ep,ef
r0
r
O
r
E0
F IG . 13.8.
F IG . 13.9.
c Dunod – Toute reproduction non autorisée est un délit
P13– 5. Interaction nucléaire entre neutron et proton
Dans la théorie des forces nucléaires proposée par Yukawa en 1935, l’interaction attractive entre le
neutron et le proton dans le deutéron (noyau de deutérium, isotope de l’hydrogène) est caractérisée par
l’énergie potentielle suivante, fonction de la distance r qui sépare les deux particules :
K
r
E p(r) = exp −
r
a
a étant une distance caractéristique de quelques fm (1 fm = 10−15 m) et K = −100 MeV . fm la
constante d’interaction.
1. Justifier le signe de K . Trouver l’expression littérale de la force correspondante.
2. Quelle est l’expression de l’énergie potentielle effective E p,ef en fonction de la masse réduite m
du système et de son moment cinétique L∗ dans le référentiel du centre de masse ? Le graphe E p,ef (r)
a l’allure représentée sur la figure 13.9. Trouver l’équation à laquelle satisfont les valeurs r1 et r2
de r pour lesquelles E p,ef (r) = 0. Même question pour les valeurs finies rm et r M pour lesquelles
d Ep,ef / d r = 0.
3. Discuter les différents mouvements possibles suivant la valeur de l’énergie E .
4. On se place dans le cas où r = r m . Sachant que rm = 1 fm et a = 5 fm, calculer, en MeV,
E ∗, E k∗ et Ep. En déduire la valeur du moment cinétique L∗ . On rappelle que m p ≈ mn ≈ 1, 67 ×
10−27 kg.
P13– 6. Interaction harmonique entre deux corps
L’énergie potentielle d’interaction de deux corps est harmonique : E p = Kr 2/2, r étant la distance
qui sépare les deux points matériels et K une constante positive d’interaction.
1. Donner l’expression de la force d’interaction.
242
13. Système de corps ponctuels en interaction. Problème à deux corps
2. Discuter qualitativement la nature du mouvement suivant la valeur du moment cinétique.
3. Calculer l’énergie et le moment cinétique si la trajectoire est un cercle de rayon r 0.
P13– 7. Effondrement gravitationnel du Soleil
On admet que le Soleil est une distribution sphérique uniforme de masse, de rayon R ≈ 0, 7 × 10 9 m,
de masse M ≈ 2× 1030 kg et de diamètre apparent u ≈ 32 d’arc. Il rayonne de l’énergie dans tout l’espace de telle sorte que la puissance reçue par une surface de 1 m 2 sur la Terre est 1 kW.
1. En attribuant l’énergie rayonnée à un effondrement gravitationnel, calculer, en watt, le taux de
variation de l’énergie potentielle de gravitation.
2. Si la puissance rayonnée par le Soleil était constante, quelle serait la durée de vie du Soleil ?
Comparer ce résultat à la durée estimée de 5 Gan ( 1 Gan = 10 9 années).
P13– 8. Effet de marée dans un satellite
Un satellite terrestre peut être schématisé par deux corpuscules A 1 et A2 , de même masse m, à
une distance constante l l’un de l’autre. Ces points sont soumis uniquement à l’action gravitationnelle
de la Terre (Fig. 13.10). On désigne par u l’angle que fait A 1A 2 avec la direction TC définie par le
centre T de la Terre et le centre de masse C du satellite.
1. Exprimer 1/r1 = 1/TA1 en fonction de r0 = TC, l et u. Même question pour 1/r 2 = 1/TA2 .
En déduire une expression approchée de l’énergie potentielle d’interaction gravitationnelle du satellite
avec la Terre sachant que l r 0 .
2. Trouver les positions angulaires d’équilibre stable et instable du satellite.
3. Calculer la période d’oscillation autour des positions d’équilibre stable.
A2
C
r0
A1
T
θ
l
F IG . 13.10.
P13– 9. Masse volumique de l’Univers
On considère un ensemble de points matériels répartis uniformément dans un volume sphérique,
de centre O et de rayon R. La vitesse v de chaque point de la distribution est radiale, orientée vers
l’extérieur du volume et proportionnelle à sa distance r à O (loi d’Hubble) :
v = Hr
avec
H−1 = 13,7 Gan
H étant la constante d’Hubble (1 Gan = 1 milliard d’années).
1. On rappelle l’expression de l’énergie potentielle électrostatique d’une distribution analogue de
charges électriques :
ε0 E 2
1
3 Q2
Ep =
d =
4pε0 5 R
espace 2
Système de corps ponctuels en interaction. Problème à deux corps
243
E désignant le champ électrostatique, Q la charge totale et
le volume. Trouver, par analogie,
l’énergie potentielle de gravitation de la distribution de masse considérée, en fonction de la masse totale
M et de R. Commenter le signe de cette énergie.
2. Montrer que l’énergie cinétique de la distribution s’écrit : E k = aMH 2R 2, a étant un facteur
numérique à déterminer.
3. Les observations les plus récentes en astrophysique montrent que l’énergie de l’ensemble de la
distribution est nulle. Quelle est donc l’expression de la masse volumique r en fonction de H et G ?
Calculer numériquement sa valeur en unité SI. À quel nombre de nucléons par unité de volume cette
valeur correspond-elle ?
P13– 10. Galaxie spirale
Une galaxie spirale peut être schématisée par un disque et un noyau sphérique de masse M n contenant pratiquement toute la masse de la galaxie (99 %). Dans le disque, chaque constituant A (étoile,
nuage d’hydrogène, etc.), de masse m, situé à la distance r du centre O, est animé d’un mouvement
circulaire uniforme de vitesse v. On mesure cette vitesse par effet Doppler-Fizeau (cf. chapitre 32).
1. En appliquant la loi fondamentale de la dynamique au point A, montrer que l’on peut déduire
la masse Mn de la mesure de v.
2. Calculer le rapport M n /MS de la masse de la galaxie sur la masse du Soleil, sachant que
v = 325 km . s−1 à r = 4 kpc, kpc étant le kiloparsec et le parsec la distance à laquelle le diamètre de l’orbite terreste autour du Soleil est vu sous un angle de 1 seconde d’arc (cf. constante physiques).
3. Expérimentalement, on constate que, pour r < 4 kpc, la vitesse augmente avec r, ce qui est
en contradiction évidente avec le modèle simplifié considéré ? Quelle l’hypothèse faut-il remettre en
cause ?
c Dunod – Toute reproduction non autorisée est un délit
P13– 11. Ordre de grandeur de la température du Soleil
On admet que le Soleil est constitué d’un ensemble de particules identiques dont la masse est celle
du proton (mp c2 ≈ 938 MeV). L’énergie cinétique moyenne des protons est 3kBT /2, si T est la
température du Soleil et kB = 1, 38 × 10 −23 J . K−1 la constante de Boltzmann.
1. Établir la relation suivante : E k = −Ep /2.
2. Sachant que la masse du Soleil est 2 × 10 30 kg et que son rayon R = 0, 7 × 109 m, trouver un
ordre de grandeur de sa température à l’aide du théorème du viriel.
P13– 12. Viriel associé à une énergie potentielle en Ep = Kr n
On considère une particule d’énergie potentielle E p = Kr n , r étant la distance de la particule à
une origine O et n un entier positif ou négatif.
Calculer la valeur moyenne E de l’énergie totale en fonction de celle de l’énergie cinétique et de
celle de l’énergie potentielle. Étudier successivement les cas où n = 2 , n = −1 et n = −6 .
244
13. Système de corps ponctuels en interaction. Problème à deux corps
P13– 13. Système de deux corpuscules liés par un fil inextensible
Deux corps ponctuels A1 et A2, de masses respectives m 1 et m 2, sont reliés par un fil inextensible
de longueur l. Le premier se déplace sans frottement dans un plan horizontal, le second est suspendu
verticalement à une extrémité du fil. Ce dernier relie les deux corps en passant par un trou O effectué
dans le plan horizontal.
1. Pourquoi le moment cinétique de ce système en projection selon l’axe vertical ascendant Oz
est-il constant ?
2. Montrer que le travail des forces de tension exercées par le fil sur A 1 et A2 est nul. En déduire
que l’énergie mécanique du système se conserve. À quelle équation différentielle radiale le système
satisfait-il ?
3. Initialement r = l/2, ṙ = 0 et rȧ = v0. Quelle doit être la vitesse orthoradiale v 0 pour que
A2 ne traverse pas le trou ? Application numérique : m 1 = 0, 2 kg, m 2 = 0, 4 kg et l = 1 m.
P13– 14. Système de deux masselottes en interaction élastique et en chute libre
Deux masselottes A 1 et A2 de même masse m = 0, 2 kg , reliées par un ressort (raideur
K = 400 N.m−1 , longueur à vide l0 = 10 cm ), sont astreintes à se déplacer sans frottement, le
long d’un axe vertical descendant Ox . L’ensemble étant maintenu au repos par un fil, on coupe ce dernier à l’instant initial (Fig. 13.11).
1. a) Appliquer le théorème du centre de masse au système. Trouver la nature du mouvement du
centre de masse C , ainsi que la relation entre les accélérations des deux masselottes.
b) L’énergie mécanique du système se conserve-t-elle ? En déduire une seconde équation du mouvement.
2. a) Appliquer la loi fondamentale de la dynamique à chacune des masselottes par rapport au
référentiel du laboratoire R . En déduire l’équation différentielle à laquelle satisfait r = r1 − r2 .
b) Quel est le mouvement des masselottes par rapport au référentiel du centre de masse, sachant
que, dans ce dernier, on comprime initialement le ressort de 1 cm sans vitesse ? Calculer la fréquence
d’oscillation.
c) Trouver le mouvement des masselottes par rapport à R .
3. Quelles sont les accélérations des masselottes à l’instant initial ?
A1
g
A2
x
F IG . 13.11.
14
Collision de deux particules
Si la loi d’interaction entre deux particules n’est pas parfaitement connue, il est intéressant de
considérer cette interaction comme une collision : c’est là une attitude qui consiste à comparer les états
initial et final et à ignorer les états intermédiaires. L’efficacité et le succès de cette attitude ont été tels
qu’à l’heure actuelle on l’élargit à tous les domaines de la physique. L’analyse systématique en termes
de bilan et de loi de conservation, telle qu’on les rencontre en chimie notamment, relève de cette même
attitude.
En outre, les collisions sont en physique un moyen d’investigation considérable. Pour connaître la
structure d’édifices atomiques ou nucléaires, on lance sur ces derniers des projectiles de caractéristiques
connues, tels que des électrons ou des protons, et on analyse les produits de collisions.
Nous limiterons ici notre analyse au seul cadre newtonien, en laissant de côté volontairement la
très importante extension relativiste (cf. Relativité et invariance).
I . — DÉFINITION ET PROPRIÉTÉS DES COLLISIONS DE PARTICULES
c Dunod – Toute reproduction non autorisée est un délit
I . 1 . — Définition
Dans le langage habituel, on dit que deux systèmes matériels entrent en collision ou subissent un
choc à un instant, lorsque les surfaces qui les délimitent sont en contact à cet instant sans l’être dans les
instants voisins, antérieur et postérieur parfois.
L’expérience courante permet d’établir aisément que le choc :
i) dure très peu de temps,
ii) est localisé dans l’espace,
iii) implique une variation brutale de la vitesse des points qui constituent les deux systèmes matériels. Cette variation brutale de la vitesse est attribuée à une interaction de courte portée, dite de contact.
Sa complexité est si grande que l’on préfère renoncer à étudier ce qui se passe au cours du choc et ne
faire que le bilan des modifications de la quantité de mouvement et de l’énergie cinétique du système total.
Nous n’étudions ici que la collision entre deux particules réservant à une étude ultérieure le choc
entre deux solides (cf. chapitre 21).
Dans le cas de deux particules, la définition précédente du choc macroscopique par le contact de
surfaces doit être abandonnée. On doit la remplacer par la notion plus générale d’interaction.
246
14. Collision de deux particules
Considérons deux particules A 1 et A 2, de masses respectives m 1 et m2. Leur interaction de
courte portée est définie par l’énergie potentielle Ep(r), fonction de la distance r qui les sépare. Si ces
points sont à une distance suffisante l’un de l’autre, Ep (r) est pratiquement nul.
Supposons ces particules initialement à une distance telle que E p(r) = 0 et se dirigeant l’une
vers l’autre avec des vitesses v 1 et v2 dans le référentiel du laboratoire R (Fig. 14.1). Lorsqu’elles
parviennent au voisinage l’une de l’autre, E p(r) = 0 et les vitesses varient jusqu’à ce que la distance
atteigne à nouveau une valeur suffisante pour que Ep (r) soit à nouveau nul. Les vitesses acquises v1
et v2 sont alors appelées vitesses finales de la collision. On définit ainsi un domaine en dehors duquel
l’interaction est négligée.
v1
A1
v1
A1
v 2
v2 A 2
A2
Domaine d'interaction
F IG . 14.1.
I . 2 . — Lois générales
Ces lois particulières s’inscrivent dans le cadre de la mécanique des systèmes matériels mais s’appuient sur les hypothèses de localisation et de brièveté des collisions. Elles méritent le qualificatif de
générales, d’une part parce qu’elles concernent tous les systèmes dont le mouvement satisfait aux hypothèses précédentes, d’autre part en raison de l’influence négligeable de la nature précise de l’interaction.
a) Conservation de la quantité de mouvement totale
Le système des deux particules étant isolé, la quantité de mouvement de l’ensemble, par rapport au
référentiel du laboratoire R, est une constante vectorielle du mouvement (cf. chapitre 13). Les quantités
de mouvement avant et après la collision sont donc égales : P av = Pap . Il en résulte, avec des notations
explicites, l’indice i désignant les particules initiales de la collision et l’indice f les particules finales :
pi =
i
pf
f
Notons que, dans le cas de systèmes non isolés, soumis à des forces extérieures finies telles que
la pesanteur, la conservation de la quantité de mouvement est encore satisfaite. En effet, une analyse
attentive (cf. chapitre 21) montre que la variation de la quantité de mouvement totale fait apparaître les
forces extérieures uniquement par leurs percussions :
t1 +t
t1
Fex→i d t
t étant la durée de la collision. En effet :
dP
= S ex =
dt
Fex→i
i
entraîne
dP =
Fex→i d t
i
d’où
t 1 +t
r
DP = P =
i
t1
Fex→i d t
247
Collision de deux particules
Comme t est très faible devant toute durée caractéristique de l’expérience, les forces finies ont des
percussions négligeables :
t1 +t
t1
F ex→i d t tF m ≈ 0
Fex→i F m
si
C’est là une simplification de taille qui explique l’intérêt de l’analyse en termes de collision.
b) Conservation de l’énergie totale
Si on suppose que les forces d’interaction intérieures au système des deux particules dérivent d’une
énergie potentielle, l’énergie mécanique, somme de l’énergie cinétique et de l’énergie potentielle, est
aussi une constante.
Au cours d’une collision, les particules A 1 et A2 peuvent se scinder en deux : leur état peut donc
fondamentalement être modifié. Afin de tenir compte d’une telle modification, nous devons étendre la
conservation de l’énergie mécanique à celle de l’énergie totale E, somme des énergies cinétiques, de
l’énergie potentielle extérieure Ep,ex , et d’une énergie interne U du système, laquelle est constituée de
l’énergie potentielle d’interaction et des énergies internes Ui de chacune des particules. On a donc :
avec
E av = Eap
et U = E p,in +
E = Ek + E p,ex + U
Ui
i
Comme la variation de position du système est négligeable au cours de la collision, E p,ex et Ep,in ne
varient pas. Il en résulte en explicitant :
i
Ek,i + Ui =
f
Ek,f + Uf
c) Collision élastique
i) Définition
Une collision est dite élastique si le nombre ou la nature des particules en interaction sont inchangés. On en déduit que, dans une telle collision, l’énergie cinétique totale se conserve :
Ui =
c Dunod – Toute reproduction non autorisée est un délit
i
Uf
d’où
i
f
Ek,i =
f
Ek,f
Si, après l’interaction, le nombre ou la nature des deux particules sont modifiés, la collision est inélastique. En physique, les exemples sont nombreux : citons l’interaction chimique de deux molécules, la fusion de deux particules, l’excitation d’une transition atomique à la suite d’une collision électron-atome.
Ainsi, au cours d’une collision élastique entre deux particules, ce que l’on représente par :
on a :
A1 + A 2 −→ A1 + A2
p1 + p 2 = p 1 + p2
et
p21
p2
p2
p2
+ 2 = 1 + 2
2m 1 2m2
2m 1
2m2
La loi de conservation de la quantité de mouvement d’un système de deux particules, au cours
d’une collision élastique, fournit une méthode de comparaison des masses de deux particules. En effet,
en primant les grandeurs après la collision, on a :
m1v 1 + m2 v2 = m 1 v1 + m2v2
d’où
m2
v − v 1
= 1
m1
v2 − v 2
248
14. Collision de deux particules
ii) Propriété remarquable d’une collision élastique dans le référentiel du centre de masse
Dans le référentiel R ∗ , qui a les mêmes propriétés que R, puisqu’il a un mouvement de translation et que le système est isolé, les relations de conservation précédentes s’écrivent, si la collision est
élastique :
p∗2
p∗2
p∗2
p∗2
∗
1
2
1
2
+
=
+
p∗1 + p∗2 = p∗
+
p
=
0
et
1
2
2m1
2m2
2m 1
2m2
Les équations de conservation précédentes donnent :
p∗2
1
2
1
1
+
m1
m2
=
p∗2
1
2
1
1
+
m1
m2
d’où
∗
∗
p ∗1 = p∗
1 = p2 = p2
Au cours d’une collision élastique, chacune des particules conserve la norme de sa quantité de mouvement et donc son énergie dans le référentiel du centre de masse R ∗ .
Ce résultat est important, car il permet de déduire le caractère élastique ou non d’une collision de
la seule observation de la conservation de la norme de la quantité de mouvement de l’une des deux
particules. Par exemple, en microscopie électronique, où l’électron incident pénètre dans l’échantillon
avec lequel il interagit, on peut aisément tirer de la conservation de l’énergie de l’électron incident le
caractère élastique ou non de la collision. En effet, dans ce cas, en raison du rapport élevé des masses
des particules en interaction (électron et atome), le référentiel du centre de masse est confondu avec le
référentiel du laboratoire.
Sur la figure 14.2a, on a représenté les vecteurs quantités de mouvement de chaque particule dans
R ∗, avant et après la collision élastique.
R∗
p∗
1
p∗2
R
p∗1
p2
p ∗
2
p 1
p1
a)
b)
F IG . 14.2.
iii) Cas particulier important
Si le projectile et la cible immobile ont même masse (Fig. 14.2b), l’angle que font entre eux les
vecteurs quantités de mouvement après la collision élastique est droit, car les relations :
p1 + 0 = p 1 + p2
et p 21 = p 21 + p22
impliquent que le triangle formé par p1 , p1 et p2 est rectangle. En effet, on reconnaît dans la deuxième
équation la relation de Pythagore.
d) Collision inélastique
Si, après l’interaction, le nombre ou la nature des deux particules sont modifiés, la collision est
inélastique. En physique, les exemples sont nombreux : citons l’interaction chimique de deux molécules,
la fusion de deux particules, l’excitation d’une transition atomique à la suite d’une collision électronatome. Typiquement, on écrira :
A 1 + A 2 −→ A3 + A 4 + A5 + · · ·
249
Collision de deux particules
II . — COLLISION ÉLASTIQUE DIRECTE DE DEUX PARTICULES
Une collision élastique est directe si les vecteurs vitesses, avant et après la collision, sont colinéaires.
II . 1 . — Vitesses après la collision
Les lois de conservation de la quantité de mouvement totale et de l’énergie cinétique totale fournissent deux équations scalaires contenant les deux inconnues v1 et v 2 sur l’axe du mouvement. Il
vient :
1
1
1
1
m1 v1 + m2v 2 = m 1v 1 + m2v 2 et
m1v 12 + m2 v 22 = m 1v 21 + m 2 v22
2
2
2
2
soit :
m 1(v 1 − v1 ) = m2 (v 2 − v2) et m1 (v21 − v21 ) = m2(v 22 − v22)
En divisant cette dernière équation par la précédente, on trouve : v1 + v1 = v 2 + v 2. Il en résulte que :
v1 =
2m2v 2 + (m1 − m2 )v1
m 1 + m2
et v 2 =
2m1 v1 − (m1 − m2 )v2
m 1 + m2
Dans le cas particulier important où la particule A2 est une cible immobile (v 2 = 0), ces relations
deviennent :
2m1
m1− m2
v1 =
v1
v 2 =
v1
m1+ m2
m 1 + m2
Si m2 > m1, le choc fait rebrousser chemin à A1 , alors que si m2 < m1, A 1 garde le même sens de
déplacement. Pour m2 = m 1, A1 et A2 échangent leurs vitesses.
II . 2 . — Perte d’énergie cinétique du projectile lorsque la cible est immobile
La perte d’énergie cinétique de la particule A 1 est, au cours d’une collision élastique directe :
c Dunod – Toute reproduction non autorisée est un délit
1
4m 1 m2
Q = −DE k,1 = DEk,2 = m 2v 22 =
Ek,1
2
(m1 + m2 )2
i) Si m1 = m2, c’est par exemple la collision électron-électron ou la collision proton-proton :
Q = Ek,1 et E k,1 = 0 Le projectile A1 perd toute son énergie cinétique au profit de A 2 .
ii) Si m 1 m 2, c’est par exemple la collision proton-électron :
Q≈
4m2
E Ek,1
m 1 k,1
L’énergie cédée par le projectile A 1 à la cible A 2 est très faible.
iii) Si m 1 m2, c’est par exemple la collision électron-proton ou celle d’une masse ponctuelle
sur une paroi fixe rigide (cf. chapitre 21) :
Q≈
Là aussi, l’énergie fournie à A2 est faible.
4m1
E Ek,1
m 2 k,1
250
14. Collision de deux particules
III . — DIFFUSION ÉLASTIQUE PAR UNE CIBLE IMMOBILE
Cette étude, dont le paragraphe précédent n’est qu’un cas particulier, est très importante en physique des collisions : A1 est le projectile et A2 la cible immobile.
Le problème posé ne peut être complètement résolu : en effet, comme le mouvement est plan,
les équations de conservation de la quantité de mouvement et de l’énergie cinétique fournissent au
total trois équations, alors que le nombre d’inconnues scalaires est de quatre : v1x
, v1y
, v 2x, v2y. Cette
indétermination est due à l’ignorance de l’énergie potentielle Ep(r). Cependant, cette étude présente un
grand intérêt, car les résultats établis sont alors indépendants de la nature particulière de E p(r).
III . 1 . — Représentation géométrique de p1 et p2
Dans le référentiel du centre de masse R ∗ , on sait que les quantités de mouvement des particules
sont opposées et leurs normes conservées (cf. chapitre 13 et I.2c) :
p∗1 = p∗2 = p∗1 = p∗2 = p ∗ = mv
avec
m=
m 1m2
m1 + m2
et v = v1 − v2
m étant la masse réduite du système des deux particules.
Dans le cas considéré où la cible est au repos (v 2 = 0) :
v = v 1 − v2 = v 1
d’où
p∗ = mv = mv1
En utilisant la loi de composition des vitesses de A1 , entre R et R∗ , on obtient p1 :
∗
p 1 = m 1v1 = m 1(v∗
1 + v C) = p1 + m1 v C
avec
vC =
mv 1
m1v1 + m2 v2
m1 v1
=
=
m1 + m2
m1 + m2
m2
puisque v2 = 0. Si l’on désigne par n le vecteur unitaire porté par la direction de p ∗1 et par u∗
l’angle (v1 , n), p 1 s’écrit :
p 1 = p ∗n +
m1
mv1
m2
On établit de même que :
p 2 = m 2(v∗2 + vC ) = p ∗2 + m2v C = −p ∗1 + mv1 = −p∗ n + mv1
puisque
p ∗2 = −p ∗1 = −p∗ n
Il est commode de représenter géométriquement ces résultats en traçant un cercle, de centre une origine
arbitraire O, de rayon p∗ = mv1, et en portant les vecteurs OB = mv1 et OA = −(m 1/m 2)mv1
(Fig. 14.3a). La valeur de l’angle de diffusion u ∗ dans R ∗ détermine la position d’un point C sur le
cercle et donc p1 et p2 car :
Notons que :
p 1 = AC = AO + OC et p 2 = CB = OB − OC
AB = OB − OA = mv1
1+
m1
m2
= m1 v1 = p1
Le point B est sur le cercle ; il en est de même pour A si les masses des deux particules sont égales.
251
Collision de deux particules
K
C
p2
p1
∗
µ
A
µ10 n p∗
B
Direction
m
1
H
− ¹v O
µ 2 incidente
m2
0
0
A
u1,m
m
− 1 ¹v
m2
a)
p1
µ0
1
C
n
O
p∗ µ
∗
p 2
B
H
µ 2
b)
F IG . 14.3.
III . 2 . — Expressions des angles de diffusion dans R
À l’aide de la figure 14.3a, on voit que l’angle u 1 de diffusion dans R de la particule A 1 a pour
expression :
sin u ∗
HC
p∗ sin u ∗
=
=
tan u 1 =
AH
m1 /m2 p ∗ + p∗ cos u∗
m1 /m2 + cos u∗
On en déduit u2 :
p u∗
−
=
2
2
<
m
Notons que, si m1
2 , l’angle de diffusion du projectile u 1 peut être compris entre 0 et p ; cette
dernière valeur correspond à la rétrodiffusion.
En revanche, si m1 > m2, l’angle de diffusion du projectile u 1 est compris entre 0 et une valeur limite
que l’on obtient aisément à l’aide de la représentation géométrique. Le point représentatif A est alors
situé à l’extérieur du cercle (Fig. 14.3b) ; l’angle de diffusion maximale u 1,m est l’angle que fait la tangente menée de A au cercle avec la quantité de mouvement p1 = AB = m1 v1 . On voit aisément que :
|u2|
sin u1,m =
OK
m2
mv
=
=
OA
m1 mv/m2
m1
Ainsi, dans une collision élastique entre un proton projectile et un électron cible, la valeur maximale de
l’angle de diffusion du proton n’est que : u1,m = 1/1 836 ≈ 0, 5 mrad.
c Dunod – Toute reproduction non autorisée est un délit
III . 3 . — Perte d’énergie du projectile
Cette énergie est l’énergie cinétique acquise par la cible A 2 . En s’aidant de la figure 14.3a, on
trouve :
∗
p22
4m 2v 21 sin 2(u∗ /2)
4m 1m2
2 u
Q = Ek,2 =
Ek,1/R
=
=
sin
2m2
2m2
2
(m 1 + m2) 2
On détermine u∗ à l’aide de loi d’interaction Ep(r). Par exemple, dans les cas newtonien ou coulombien pour lesquels Ep(r) = K /r, on montre que (cf. chapitre 15) :
tan
u∗
2
=
|K |
2bE k,1
b étant le paramètre d’impact de collision, c’est-à-dire la distance de la cible à la vitesse initiale du
projectile A1 . Dans ces conditions, la perte d’énergie relative est :
4m1 m2
1
Q
=
2
E k,1
(m1 + m2) 1 + (2bE k,1/K) 2
252
14. Collision de deux particules
Si Ek,1 |K |/2b, les expressions précédentes se réduisent à :
u∗ ≈
|K |/b
1 et
Ek,1
4m1m2
Q
≈
(m 1 + m 2 )2
Ek,1
K
2bEk,1
2
L’angle de diffusion et la perte d’énergie relative de la particule projectile sont alors très faibles.
III . 4 . — Exemples
a) Collision électron-électron
Comme m1 = m 2 = m e , le point représentatif A est sur le cercle de centre O et de rayon mv1
(Fig. 14.4a). On retrouve la diffusion à angle droit. La perte d’énergie est maximale au cours du choc
direct (u∗ = p) :
Q max
=1
E k,1
Ce type de collision est fréquent ; en microscopie électronique par exemple, l’électron incident provenant du canon du microscope entre en collision avec les électrons atomiques des édifices constituant le
matériau observé.
p1
C
p1
A
θ1
O
C
p2
θ∗
θ∗
B
θ2
a)
O
b)
C
p 1
p2
A
B
θ2
O
θ1
p 2
B
θ2
c)
F IG . 14.4.
b) Collision proton-électron
Dans ce cas, m 1 = m p et m2 = me mp. Le point représentatif A est à gauche de O, à très
grande distance (Fig. 14.4b). L’angle de diffusion u1 est très faible : le proton n’est donc pratiquement
pas dévié et :
Qmax
4me
≈
Ek,1
mp
c) Collision électron-proton
Le point représentatif A est très voisin du centre O puisque m 1 = me, m2 = mp m e
(Fig. 14.4c). On voit que u 1 = u∗ , ce qui était prévisible puisque les référentiels du laboratoire et
du centre de masse sont dans ce cas pratiquement confondus. Il en résulte que :
4me
Qmax
≈
Ek,1
mp
Notons que la norme de la quantité de mouvement de la particule diffusée (OC) est la même que celle
de la particule incidente (OB). Ce résultat est celui d’une collision élastique d’une masse ponctuelle
sur une paroi fixe.
253
Collision de deux particules
IV . — COLLISIONS INÉLASTIQUES
IV . 1 . — Facteur énergétique d’une collision
On caractérise une collision inélastique entre deux particules, l’une le projectile, l’autre la cible,
par la variation d’énergie cinétique du système :
DEk =
E k,f −
f
i
Ek,i =
i
Ui −
Uf
f
Si DEk < 0, la collision inélastique est endoénergétique ; si DEk > 0, elle est exoénergétique.
Il est naturel d’introduire le facteur de restitution en énergie ε :
ε=
f
i
Ek,f
Ek,i
Pour ε = 0, la perte d’énergie cinétique est maximale : la collision est parfaitement inélastique. On
retrouve évidemment la limite élastique en faisant ε = 1.
Exemples :
(1) La collision entre deux points matériels, dont l’un se brise en deux, est nécessairement endoénergétique, puisqu’une partie de l’énergie cinétique initiale a servi à séparer en deux parties l’une des
particules.
(2) Une réaction chimique exothermique entre deux molécules est une collision inélastique.
(3) Une collision entre deux particules A 1 et A 2 qui restent soudées en formant une particule
unique A3 est parfaitement inélastique. En effet, dans le référentiel R ∗, galiléen puisque le système
peut être considéré comme isolé, on a :
∗
∗
∗
− (E k,1
+ E ∗k,2) avec Ek,3
=0
DEk = DEk∗ = Ek,3
puisque la particule A3 est fixe dans R ∗ . Par conséquent :
DEk = −
i
E ∗k,i
Ainsi, au cours d’une collision parfaitement inélastique, le système perd toute son énergie cinétique.
c Dunod – Toute reproduction non autorisée est un délit
IV . 2 . — Énergie cinétique seuil d’une collision inélastique
Considérons une collision inélastique entre un atome projectile, d’énergie cinétique E k,1 , et une
molécule cible au repos. Après collision, la cible est dans un nouvel état caractérisé par une nouvelle
valeur de l’énergie interne. L’équation de conservation de l’énergie donne, dans R ∗ :
i
Ek∗,i + Ui =
f
Ek∗,f + Uf
Dans R∗ , les produits de la réaction peuvent être chacun au repos puisque l’on peut réaliser P ∗ = 0
en faisant séparément p∗f = 0, soit E ∗k,f = 0. On en déduit :
i
Ek∗,i + Ui
Uf
f
soit
i
Ek∗,i DU
avec
DU =
f
Uf −
Ui
i
Comme l’énergie cinétique des deux particules dans R∗ est mv2 /2, v étant la vitesse relative, et que
la cible est immobile dans R, on a :
Ek∗ =
mv 2
=
2
m1m 2
m1 + m2
v 21
m2
Ek,1 DU
=
2
m1 + m 2
d’où
E k,1
m1 + m2
DU
m2
254
14. Collision de deux particules
Ainsi, l’énergie cinétique seuil de la collision inélastique a pour expression :
s
Ek,1
=
m 1 + m2
DU
m2
Exemple : L’énergie cinétique seuil d’un électron incident capable de produire une transition K
d’un électron atomique dans l’aluminium, c’est-à-dire d’extraire totalement de l’atome cet électron de
la couche K, est :
m + mAl
E sk,1 = e
E K ≈ EK = 1 550 eV
mAl
puisque m e m Al . Avec un proton incident, cette énergie serait :
s
Ek,1
=
m p + m Al
28
EK =
× 1 550 ≈ 1 607 eV
27
m Al
Remarque : Ce concept d’énergie cinétique seuil joue un rôle majeur dans les collisions inélastiques
relativistes car il permet de prévoir la création de particules nouvelles à l’issue d’une
collision (cf. Relativité et invariance).
CONCLUSION
Retenons, outre l’importance des collisions comme moyen d’investigation en physique, plusieurs
points.
(1) Au cours d’une collision élastique ou inélastique, la quantité de mouvement et l’énergie du
système isolé constitué par les particules se conservent :
pi =
i
pf
i
f
E k,i + Ui =
f
Ek,f + U f
(2) Si la collision est élastique, l’énergie cinétique totale se conserve :
i
Ek,i =
f
Ek,f
(3) Dans le référentiel du centre de masse, l’énergie cinétique de chaque particule se conserve au
cours d’une collision élastique.
(4) L’énergie cinétique seuil d’une collision inélastique entre une particule projectile et une particule cible au repos a pour expression :
m 1 + m2
s
DU
Ek,1
=
m2
DU étant la variation d’énergie interne du système au cours de la collision inélastique.
Pour étudier les collisions entre particules rapides, il est nécessaire de se placer dans le cadre
relativiste. Les lois de conservation y sont les mêmes, mais les expressions de la quantité de mouvement
et de l’énergie cinétique sont différentes ; plus important, le concept d’énergie de masse, qui s’introduit
naturellement joue un rôle essentiel dans l’écriture de la conservation de l’énergie au cours des collisions
inélastiques de type fission ou fusion de particules (cf. Relativité et invariance).
255
Collision de deux particules
EXERCICES ET PROBLÈMES
P14– 1. Spectrométrie neutronique
On considère un faisceau de neutrons dont on veut déterminer l’énergie cinétique à partir de l’étude
de la collision élastique neutron-noyau d’hélium. Ce dernier joue le rôle de particule cible, au repos dans
le référentiel du laboratoire R. On adopte les notations suivantes : m 1 est la masse du neutron et m2
celle du noyau, Ek,1 est l’énergie cinétique et p1 la quantité de mouvement du neutron incident, E k,1 est
l’énergie cinétique et p1 la quantité de mouvement du neutron diffusé, Ek,2
est l’énergie cinétique et p 2
la quantité de mouvement du noyau après la collision, u1 et u2 sont respectivement les angles (p1 , p1)
et (p1, p 2).
1. Quelle est, en fonction de m 1, m 2, u2 et Ek,1 , l’énergie cinétique Q transférée au noyau ? Les
noyaux cibles étant connus, montrer que la mesure de Q et de u 2 permet d’obtenir la valeur de E k,1.
2. On considère le cas où m2 > m 1.
a) À partir des lois de conservation, montrer que |u 2| est compris entre 0 et p/2.
b) Calculer la valeur maximale Q max de Q pour Ek,1 , m1 et m 2 fixés. Préciser les valeurs cor , p , p
respondantes de Ek,1
1
2 , u 2 et u1 .
, p
c) Quelle est la valeur minimale Q min de Q. Préciser les valeurs correspondantes de Ek,1
1,
p 2, u2 et u 1.
en fonction de E
3. On considère le cas où m 1 = m 2. Exprimer E k,1 et Ek,2
k,1 et u 2. Que peut-on
dire des directions de p1 et p 2 ?
P14– 2. Ralentissement de neutrons
c Dunod – Toute reproduction non autorisée est un délit
1. Quelle est l’énergie maximale Q max transférée à un atome cible (masse ma) par un neutron
(masse mn) d’énergie cinétique E k , au cours d’une collision élastique ? Représenter q max = Qmax /Ek
en fonction du rapport des masses h = mn/ma.
2. Pour ralentir des neutrons, d’énergie cinétique initiale E k,i = 6 MeV, jusqu’à ce qu’ils deviennent des neutrons thermiques d’énergie cinétique finale E k,f = 3k BT /2, à T = 300 K, on leur
fait subir des collisions avec des atomes de masse mq = 9mn . Sachant que la perte d’énergie relative est en moyenne égale à 0, 82 qmax/2 , à chaque collision, calculer le nombre moyen de collisions
nécessaires à ce ralentissement.
P14– 3. Angle maximal de diffusion dans une collision élastique
Montrer que la diffusion élastique d’un projectile A 1 par une cible A2 , de masse m2 < m1 ,
sous un angle déterminé, peut être réalisée pour deux valeurs différentes de l’énergie cinétique transmise à la particule cible A2. On utilisera la représentation graphique des quantités de mouvement à
l’aide du cercle de rayon mv, m étant la masse réduite et v la différence des vitesses des deux particules (Fig. 14.4).
P14– 4. Énergie transférée au cours d’une collision inélastique
Un projectile A 1, de masse m1 , de quantité de mouvement p 1 = m1 v1 et d’énergie cinétique
E k,1 , est dévié par un atome cible A2 au repos, de masse m 2 m 1. L’atome acquiert une énergie
cinétique négligeable et une énergie interne DE E k,1.
256
14. Collision de deux particules
1. Écrire les relations vectorielle et scalaire relatives à la quantité de mouvement et à l’énergie. On
désigne par p et p les quantités de mouvement de A1 avant et après la collision, et par P la quantité
de mouvement acquise par A2 .
2. Exprimer P 2 en fonction de l’angle de diffusion u = (p, p ) et analyser le cas où u est petit.
3. Quelles sont les valeurs extrêmes de Q = P2 /(2m e ), me étant la masse de l’électron, particule
projectile ?
P14– 5. Énergie seuil d’une collision inélastique
Un proton A 1 subit une collision inélastique avec un atome de carbone A 2 au repos (masse m2).
Après collision, les particules A 1 et A ∗2 , issues de la réaction, s’écartent d’un angle u avec les énergies
cinétiques respectives Ek,1
et E k,2 . L’énergie interne de l’atome a augmenté de DE n ≈ 300 eV.
1. Calculer l’énergie seuil de la collision.
et u.
2. Trouver DEn en fonction de Ek,1
, Ek,2
15
Diffusion de Rutherford.
Notion de section efficace
La diffusion de particules est un thème d’une importance considérable en physique moderne. En
effet, la démarche habituelle dans la recherche des propriétés microscopiques des corps consiste souvent
à bombarder une cible inconnue avec un faisceau de particules projectiles, de caractéristiques physiques
bien connues.
L’étude de la diffusion est donc celle d’une interaction entre N corps, N étant très grand, ce qui
rend l’analyse inextricable. Cependant, on sait qu’on peut, dans la plupart des cas, ramener ce problème
à celui d’une interaction entre deux corps : le projectile et la cible (cf. chapitre 13).
Nous proposons d’abord de rappeler ce que l’on désigne habituellement par diffusion de particules
en donnant l’exemple de la diffusion de Rutherford. Nous dégageons ensuite le concept de section
efficace en nous appuyant sur le cas simple de la diffusion de particules par une sphère dure. Nous
introduisons en outre la notion de libre parcours moyen, directement associée à celle de section efficace.
I . — DIFFUSION DE RUTHERFORD
c Dunod – Toute reproduction non autorisée est un délit
I . 1 . — Aspect expérimental
L’étude expérimentale de la diffusion de particules a (noyaux d’hélium) par des atomes lourds fut
conduite par le physicien anglais E. Rutherford, à partir de 1909, afin de tester le modèle atomique proposé par les anglais W. Thomson (Lord Kelvin) et J. Thomson. Selon ce modèle, les atomes sont représentés par des distributions sphériques de charge positive dans lesquelles sont incrustées des particules
de charges négatives.
Avec ses collaborateurs, Rutherford utilisa une enceinte vidée d’air dans laquelle une source radiaoactive envoyait, sur une feuille mince d’or, des noyaux d’hélium appelées particules a (Fig. 15.1) ;
les particules diffusées étaient détectées par un matériau capable d’émettre de la lumière visible sous
l’impact d’une particule chargée (détecteur à scintillations).
Rutherford constata, à sa grande surprise, que des particules a pouvaient être détectées sous
des angles de diffusion x égaux ou supérieurs à p/2 et que certaines étaient même rétrodiffusées
(x = p). En effet, le modèle de Thomson, avec ses charges positives et négatives réparties dans le
volume de l’atome, ne permettait de prédire que de faibles angles de diffusion. En outre, avec son
équipe, il put établir que le nombre de particules a variait avec l’angle de diffusion x selon une loi en
sin−4(x/2) (Fig. 15.2).
258
15. Diffusion de Rutherford. Notion de section efficace
Nombre de particules diffusées
Feuille d’or
10 5
Lunette
10 4
Source
radioactive
Points expérimentaux
10 3
10 2
Détecteur
à scintillation
sin-4 (X/2)
10
1
0
Pompe
à vide
100
F IG . 15.1.
x(degrés)
F IG . 15.2.
La facilité avec laquelle les particules a traversaient la feuille d’or et l’existence de grandes valeurs de l’angle de diffusion conduisirent Rutherford à attribuer la diffusion sous grand angle à des
charges positives concentrées en un noyau central et la diffusion sous petit angle aux électrons placées
sur la périphérie de l’atome. Il s’en suivit l’abandon du modèle atomique de Thomson au profit d’un
modèle planétaire où les électrons gravitent autour d’un noyau central, chargé positivement. Ce modèle atomique que nous allons développer fut publié par Rutherford en 1911. Il est considérée comme
l’un des acquis fondamentaux de la structure des atomes.
y A
S
χ
p0
w0
w
O
b
x
F IG . 15.3.
I . 2 . — Diffusion d’une particule par un centre de force
On a vu que le problème de l’interaction entre deux particules A 1 et A2 pouvait se réduire, dans le
référentiel du centre de masse R∗ , à un problème entre une particule fictive A et un centre de force O
situé à l’origine C de R ∗, centre de masse des deux particules (cf. chapitre 13). Dans le cas fréquent
où la particule incidente A1 a une masse négligeable devant celle de la cible A 2, A1 a, dans R∗ , un
mouvement identique à celui de A, et A 2 est pratiquement immobile dans R∗ .
Considérons une particule A qui s’approche d’un centre de force O avec une quantité de mouvement p0 . Elle passerait rectilignement à la distance b de O si l’interaction n’existait pas : b est
appelé le paramètre d’impact (Fig. 15.3).
Du fait de l’interaction, la particule est déviée et sa trajectoire devient à nouveau une droite
lorsque A s’éloigne de O. On dit que la particule A a été diffusée par O sous l’angle de diffusion
x = (p 0, p) que fait la direction émergente définie par la quantité de mouvement p avec la direction
259
Diffusion de Rutherford. Notion de section efficace
incidente. La figure est relative à la force électrostatique répulsive entre deux particules dont les charges
électriques sont de même signe.
I . 3 . — Diffusion de Rutherford
a) Nature de la diffusion
On appelle diffusion de Rutherford la diffusion associée à une interaction coulombienne entre deux
particules chargées. L’énergie potentielle électrostatique est :
Ep =
K
r
où
K = Z 1 Z2
e2
est la constante d’interaction
4pε0
b) Trajectoire hyperbolique
Établissons la relation entre l’angle de diffusion x, la vitesse v 0 de la particule incidente et le paramètre d’impact b. Rappelons d’abord que cette trajectoire est une hyperbole dans le cas répulsif
(K > 0), ainsi que dans le cas attractif (K < 0) pourvu que v 0 soit suffisamment grand. Par conséquent la trajectoire est une hyperbole d’équation en coordonnées polaires (r, w) (cf. chapitre 12) :
2pEm 1/2
p
L2
K
ε=
où p =
et e = 1 +
−ε + e cos(w − w0 )
m|K |
|K |
|K |
w 0 étant l’angle correspondant à r minimal. Rappelons que m = m 1m 2/(m 1 +m2 ) est la masse réduite
de A, p est le paramètre de la conique, e son excentricité, E m l’énergie totale dans R∗ qui est une
constante égale à mv20 /2 et L son moment cinétique constant dans R∗ :
L = −mv 0 b ez = −L e z avec L = bp 0 = mv0b
L’angle de diffusion x est la valeur de w pour laquelle r est infini. On a donc :
ε
cos(x − w 0) =
e
Or, une autre relation entre x et l’angle w0 peut être facilement établie, à partir du schéma de diffusion
(Fig. 15.3) :
x p
x = p − 2(p − w0) d’où w 0 = +
2
2
Il en résulte que :
x
ε
1
=
sin
soit e 2 = 1 +
2
e
2
tan (x/2)
En égalant les deux expressions de l’excentricité, on trouve :
c Dunod – Toute reproduction non autorisée est un délit
r=
tan2
x
|K |
mK 2
K2
=
=
=
2
2pEm
2EmL 2
4b2E 2m
puisque L2 = m2 v20 b2 = 2mb2 Em . On en déduit :
tan
x
2
|K |
r0
=±
=±
2bE m
2b
avec
r0 =
|K |
Em
La grandeur r0 , qui a les dimensions d’une longueur, est la distance pour laquelle l’énergie du système
est égale à la valeur absolue de son énergie potentielle :
Em =
|K |
r0
260
15. Diffusion de Rutherford. Notion de section efficace
Dans le cas répulsif (K > 0), r0 est la distance minimale d’approche du projectile au cours d’une
interaction à paramètre d’impact nul.
Il est commode d’exprimer les caractéristiques de la trajectoire hyperbolique (p et e) en fonction
de r 0 et b :
mv 20b2
2b 2
L2
=
=
p=
m|K |
|K |
r0
et e = 1 + tan
−2
x
2
1/2
1/2
4b2
= 1+ 2
r0
2
=
r0
1/2
r2
b + 0
4
2
On peut déduire de ces expressions la distance minimale de la particule au centre de force :
rmin =
p
b2
= 2
=
e−1
(b + r 20/4)1/2 − r0 /2
b2 +
1/2
r20
4
+
r0
2
Pour b = 0, on trouve évidemment rmin = r0 .
Notons que l’angle de diffusion est positif pour K > 0 : la trajectoire est une hyperbole qui
s’éloigne du centre répulsif (Fig. 15.4a). Il est en revanche négatif pour K < 0 : la trajectoire est une
hyperbole qui se rapproche du centre attractif (Fig. 15.4b). On a respectivement :
r=
y
p
−1 + e cos(w − w0)
et r =
p
1 + e cos(w − w 0)
Diffusion répulsive ( K > 0 )
y
Diffusion attractive ( K < 0 )
A
S
χ
S
χ
eχ
ed
O
b
O
b
x
A
x
a)
b)
F IG . 15.4.
c) Conservation du vecteur de Runge-Lenz
La relation entre l’angle de diffusion x et le paramètre d’impact b peut être établie autrement à
partir de la conservation du vecteur de Runge-Lenz caractéristique de l’interaction keplérienne (cf. chapitre 12) :
R = v × L + K er
En effet, exprimons l’égalité entre le vecteur R0 initial et le vecteur Rd final dirigé suivant la direction
diffusée. Il vient, puisque L = −L ez avec L = mv 0b (Fig. 15.4a) :
−v0L e x × ez − Kex = −v0 L ed × e z + K e d
soit
v0 L e y − Kex = v 0L e x + K e d
en posant ex = e z × ed. Projetons cette dernière équation suivant l’axe Ox défini par la direction
incidente ; on obtient, si K > 0 et donc x > 0 :
−K = −v 0L sin x + K cos x
261
Diffusion de Rutherford. Notion de section efficace
soit, en remplaçant L par mv0 b :
sin x
K
=
v0L
1 + cos x
ce qui s’écrit aussi
tan
x
2
=
K
|K |
=
2b
2bE m
mv0
puisque K > 0. Notons que le vecteur R est colinéaire au vecteur OS, S étant la position de A si sa
distance au centre O est minimale ; en effet, lorsque A est en S, le vecteur v × L est aussi colinéaire
à er .
I . 4 . — Modèle atomique de Rutherford
On peut résumer le modèle atomique de Rutherford en trois points :
i) L’atome est constitué d’un noyau central de charge positive Z 2 e contenant la presque totalité
de la masse, malgré un rayon de l’ordre de 1 fm très faible devant les dimensions de l’atome. C’est le
noyau qui est responsable de la diffusion des particules à grand angle.
ii) Le noyau produit dans son entourage un champ électrique coulombien d’expression :
Z2 e
E=
er
4pε0 r
iii) Les électrons, de charge négative et de masse bien plus faible, sont en mouvement autour du
noyau sous l’action des forces d’interaction coulombienne. Ils contribuent à la diffusion à petit angle.
Sur la figure 15.5, on a schématisé les différentes diffusions angulaires en fonction du paramètre
d’impact.
Faisceau de
particules
Atome
F IG . 15.5.
c Dunod – Toute reproduction non autorisée est un délit
Dans l’expérience initiale de Rutherford, dans laquelle des particules a étaient diffusées par des
atomes d’or, K était positif (Fig. 15.4a) :
Z1 = 2
Z 2 = 79
d’où
K = 2 × 79 ×
e2
>0
4pε0
En outre, en raison du rapport des masses (ma/mAu = 4/197), la particule fictive A coïncide pratiquement avec le projectile A1 . Pour des particules a, d’énergie Em = 5 MeV, la relation reliant x,
et b est la suivante :
tan
2, 5
x
≈
2
b(fm)
puisque
r0 =
K
158 × 9 × 109 × (1, 6 × 10−19 ) 2
=
≈ 50 fm
Em
5 × 106 × 1, 6 × 10 −19
On voit que l’angle de diffusion x est faible pour des particules incidentes de grande énergie et pour de
grandes valeurs du paramètre d’impact b. Si la diffusion se produit à petit angle x, le résultat précédent
devient :
|K |
|Ep(b)|
x≈
=
bEm
Em
En revanche, il prend la valeur p/2 pour b ≈ 2, 5 fm.
262
15. Diffusion de Rutherford. Notion de section efficace
II . — SECTIONS EFFICACES DE DIFFUSION
II . 1 . — Définition
On fait apparaître naturellement le concept de section efficace de diffusion en considérant un faisceau de particules uniforme et parallèle, arrivant sur un centre de force O (Fig. 15.6). Le faisceau est
caractérisé par le vecteur courant particulaire défini par :
Jn = nv v
nv étant le nombre de particules incidentes par unité de volume et v leur vitesse (cf. Thermodynamique). Le flux de ce vecteur à travers une surface donne l’intensité particulaire I n , c’est-à-dire le
nombre de particules qui traversent cette surface par unité de temps :
dN
= In =
Jn · n d S
dt
S
Ainsi, Jn est le nombre de particules qui traversent, par unité de temps, l’unité de surface normale à la
direction du faisceau incident.
x
A
ϕ
Détecteur
χ
z
O
y
F IG . 15.6.
a) Section efficace différentielle
Évaluons le nombre d 2N de particules diffusées par le centre de force O, pendant la durée élémentaire d t, dans un angle solide élémentaire d V, autour de la direction caractérisée par l’angle de
diffusion x et l’angle azimuthal w. Cet angle solide est concrètement défini par le détecteur placé normalement à la direction du faisceau diffusé. Si la surface élémentaire du détecteur, placé normalement
à la direction des particules, est d S, l’angle solide élémentaire a pour expression :
dV =
dS
r| sin x d w| × r| d x|
=
= | sin x d w d x|
2
r
r2
car d V est une quantité positive et les angles des grandeurs algébriques. Le nombre d2 N est proportionnel à la durée d t, à l’angle solide d V et à Jn ; aussi s’intéresse-t-on à la quantité suivante,
homogène à une surface par unité d’angle solide :
d 2N
ds
=
Jn d t d V
dV
soit
In = Jn
ds
ds dS
d V = Jn
dV
d V r2
appelée section efficace différentielle ou section efficace par unité d’angle solide, en raison de sa dimension physique ; en unités SI, on l’exprime en m2 . sr −1. Soulignons qu’a priori d s/ d V dépend à la
fois des angles x et w.
Remarque : La section efficace différentielle est le rapport de deux différentielles de même degré ; ce
n’est donc pas une différentielle au sens habituel en mathématiques.
263
Diffusion de Rutherford. Notion de section efficace
b) Section efficace totale
On obtient la section efficace totale en sommant la section efficace différentielle sur tous les angles
solides :
ds
dV
st =
V dV
Comme s t est généralement très faible, on l’exprime non pas en m 2 mais en barn : 1 barn = 10−28 m2 .
Si le système présente la symétrie de révolution, ce qui est souvent le cas, la section efficace de
diffusion ne dépend que de l’angle x. L’intégration suivant w donne donc 2p et la section efficace
totale a pour expression :
ds
st =
2p| sin x d x|
x dV
Dans la suite, nous nous placerons dans cette hypothèse.
II . 2 . — Relation entre la section efficace différentielle et l’interaction
Le nombre de particules dN diffusées, par le centre de force O, dans l’angle solide d V, défini
par l’espace compris entre les cônes de demi-angle x et x + d x, est le nombre de particules qui ont
traversé, pendant la même durée élémentaire d t, l’anneau de rayon intérieur b et de rayon extérieur
b + d b. Il vaut d2 N = Jn 2pb | d b| d t. Par conséquent :
ds
2pb | d b|
d 2N
=
=
dV
d
t
d
V
dV
Jn
soit
ds
db
b
=
dV
| sin x| d x
Nous allons calculer les sections efficaces différentielles de diffusion que donnent deux modèles
efficaces de diffusion : le modèle de la sphère dure et le modèle de Rutherford.
II . 3 . — Sections efficaces associées au modèle de la sphère dure
c Dunod – Toute reproduction non autorisée est un délit
a) Modèle de la sphère dure
Un modèle d’interaction particulièrement simple est celui de la « sphère dure », c’est-à-dire que
Ep = 0 pour r > R et Ep est infini pour r < R (Fig. 15.7a). On comprend l’origine de l’expression : l’interaction entre une particule et une sphère impénétrable immobile est caractérisée par une telle
énergie potentielle. Si le paramètre d’impact b est supérieur à R, il n’y a pas d’interaction. Si b est
compris entre 0 et R la particule A est diffusé par la sphère ; le cas où b est nul correspond à la collision de plein fouet (Fig. 15.7b).
Ep
p0
b
O
R
a)
r
R
b)
F IG . 15.7.
264
15. Diffusion de Rutherford. Notion de section efficace
b) Section efficace différentielle
Supposons que le faisceau de particules tombe sur une sphère dure immobile de rayon R. Si la
collision est élastique, les valeurs absolues des angles incident et réfléchi sont égales (cf. chapitre 14).
La relation entre l’angle de diffusion x et le paramètre d’impact b, défini à partir du centre de la
sphère, est alors facile à établir ; en effet, on voit, à l’aide de la figure 15.8, que :
p−x
x
x
b
R
= sin
= cos
donne d b = − sin
dx
2
2
2
2
R
en différentiant. On en déduit :
db
x
b
R 2 cos(x/2)
=
sin
| sin x| d x
2
sin x
2
d’où
ds
dV
=
sd
R2
4
Cette section efficace différentielle est donc indépendante de l’angle de diffusion : elle est isotrope.
χ
χ + dχ
R
b + db
b
π −χ
2
F IG . 15.8.
c) Section efficace totale
Comme (d s/ d V) sd = R2/4, il vient :
R2
R2
dV =
V soit
st = pR2
4
4
Ainsi, la section efficace totale de collision est, dans le modèle de diffusion de la sphère dure, égale à
l’aire de la projection de la sphère dans un plan perpendiculaire à la direction du faisceau incident. Cet
exemple simple montre que la section efficace est reliée à la surface présentée par la cible.
st =
ds =
Nous n’avons considéré que le cas de particules ponctuelles heurtant une sphère immobile de rayon
R. Si la particule incidente est une sphère de rayon R 1 diffusée par une sphère immobile de rayon R2 ,
l’énergie potentielle d’interaction caractéristique a la même forme que précédemment, mais :
Il en résulte que :
Ep = 0
pour
r > R1 + R 2
ds
dV
et Ep = ∞ pour
=
sd
r < R1 + R 2
(R 1 + R2 )2
4
La section efficace totale a alors pour expression : s t = p(R 1 + R 2) 2.
II . 4 . — Section efficace de Rutherford
a) Section efficace différentielle
Le calcul de la section efficace de diffusion de Rutherford joue un rôle important puisque l’interaction coulombienne est celle qui prévaut dans le cas des particules chargées. Rappelons la relation entre
265
Diffusion de Rutherford. Notion de section efficace
le paramètre d’impact et l’angle de diffusion x :
x
r0
=
2
2b
tan
Par conséquent, en différentiant, on obtient :
db
1
b
b3
=
sin x d x
r0 | sin x| cos2 x/2
R
En remplaçant b par son expression en fonction de tan(x/2), on trouve finalement :
dx
−r 0 d b
=
2
2 cos (x/2)
2b2
et
ds
dV
ds
dV
=
R
=
r0
4
2
1
sin (x/2)
4
Cette section efficace différentielle varie fortement avec x. Notons que, pour les faibles valeurs de x,
l’expression précédente ne convient pas puisqu’elle donne une valeur infinie ; ce résultat inacceptable
doit être attribué à l’insuffisance du modèle coulombien pour décrire la réalité.
Dans ce cas, on évite cette difficulté en remplaçant l’énergie potentielle en 1/r par une énergie
potentielle d’interaction écrantée de la forme :
Ep =
K
r
exp −
r
a
La distance a, appelée distance d’écran, décrit l’influence du nuage électronique qui entoure le noyau.
Cette analyse plus fine conduit finalement à substituer, à l’expression précédente de la section efficace
différentielle, une autre légèrement différente qui contient un facteur d’écran h lié à la distance a
(Fig. 15.9) :
ds
dV
=
R,e
r0
4
1
2
sin 2 (x/2 + h)
2
On l’appelle la section efficace différentielle écrantée de Rutherford.
c Dunod – Toute reproduction non autorisée est un délit
d¾
dΩ
0
Â
F IG . 15.9.
b) Section efficace totale
En intégrant (d s/ d V) R , on obtient :
st =
r0
4
2
1
2p| sin x d x|
4
sin (x/2)
soit
s t = 4p
r0
4
2
cos(x/2)
dx
sin 3(x/2)
Évidemment, cette expression ne convient pas si l’intégration contient la valeur nulle de x. On
doit dans ce cas lui substituer la valeur que l’on obtient de façon plus laborieuse à partir de la section
efficace différentielle écrantée.
266
15. Diffusion de Rutherford. Notion de section efficace
III . — LIBRE PARCOURS MOYEN
III . 1 . — Traversée d’un matériau par un faisceau de particules
Lorsqu’une particule chargée traverse un matériau, elle subit des collisions successives élastiques
et inélastiques. Les premières écartent la particule de sa direction initiale sans changer son énergie, les
secondes la freinent en diminuant son énergie. Ce freinage est dû essentiellement à l’interaction entre
particules incidentes et électrons atomiques et non à l’interaction avec les noyaux lourds qui provoquent
seulement un changement de direction des particules incidentes.
a) Aspect expérimental
La traversée de divers matériaux par des particules chargées fut étudiée dès 1890 par le physicien hongrois P. Lenard, avec des électrons sur de l’aluminium. Lenard utilisa un dispositif tel que celui
représenté sur la figure 15.11 : les électrons produits par une tension électrique de 10 kV aux extrémités d’un tube contenant un gaz raréfié traversent une feuille mince d’aluminium ( 5 mm d’épaisseur)
puis sont détectés sur un écran fluorescent placé à quelques centimètres plus loin. Des versions plus précises et plus récentes de cette expérience, ont été conduites sur des microscopes électroniques par transmission.
Feuille d’aluminium
Gaz raréfié
x
O
−
+
x + dx
Courant
particulaire
Écran fluorescent
Détecteur
Lame
Pompe à vide
F IG . 15.10.
F IG . 15.11.
b) Atténuation d’un flux de particules à la traversée d’un matériau
Considérons un faisceau de particules tombant sur une lame d’un matériau, normalement à sa
surface (Fig. 15.12). Du fait des collisions, seule une partie des particules incidentes est diffusée et donc
déviée de la direction incidente Ox.
Comparons les nombres de particules reçues, pendant la même durée élémentaire d t, par deux
détecteurs identiques, de surface s faible, l’un placé en x et l’autre en x + d x. Il vient, en désignant
par Fn (x) le flux de particules :
d N (x) = Fn (x) d t
et
d N (x + d x) = Fn(x + d x) d t
La différence représente le nombre de particules d N d diffusées par le nombre de centres diffuseurs
rencontrés, lequel vaut : nv,d s d x, n v,d étant le nombre de ces diffuseurs par unité de volume.
Le nombre de particules diffusées est proportionnel à d t, à l’épaisseur d x, à n v,d, au flux F n(x)
et à la section efficace totale st . On a donc :
d N (x) − d N (x + d x) = d t nv,d d x Fn st
d’où
−
d Fn
d x d t = d t nv,d d x F n st
dx
On en déduit :
d Fn
= −nv,d st d x
Fn
Supposons que la quantité L = (nv,d st ) −1 , homogène à une longueur, ne dépende pas de x, ce qui
est réalisé si le milieu est homogène. L’intégration donne :
ln
Fn
Cte
=−
x
L
soit
Fn = Cte × exp −
x
L
267
Diffusion de Rutherford. Notion de section efficace
Si F n(0) désigne le flux particulaire en x = 0, la relation précédente s’écrit :
F n(x) = Fn (0) exp −
x
L
avec
L=
1
nv,dst
À partir du graphe Fn (x) (Fig. 15.12) il est possible de déduire L et donc la section efficace de
diffusion st , si l’on connaît n v,d :
ln
x
F n(0)
= x nv,d st
=
F n(x)
L
Fn (0)
Fn (x)
Fn (x)
O
L
F IG . 15.12.
x
Précisons que s t = (nv,d L)−1 ainsi déterminé représente la section efficace totale sommée sur
tous les types de collisions se produisant dans le matériau.
Remarque : Si la lame est épaisse, la mesure de Fn prend en compte la diffusion multiple, qui, après
plusieurs collisions, peut ramener la particule incidente dans la direction Ox. Il convient
donc, pour éviter cette diffusion multiple, de travailler avec des échantillons suffisamment
minces et d’extrapoler la courbe donnant F n(x) pour les faibles valeurs de x.
c Dunod – Toute reproduction non autorisée est un délit
III . 2 . — Libre parcours moyen
On appelle libre parcours moyen associé à la diffusion d’un faisceau de particules par un matériau, la distance qui sépare en moyenne deux collisions successives d’une particule du faisceau par les
centres diffuseurs du matériau.
D’après la loi de décroissance exponentielle précédente, les N(0) particules, que recevrait le détecteur placé en x = 0, subissent des collisions avec les centres diffuseurs du matériau, après des distances parcourues différentes comprises entre 0 et l’infini.
Par définition du libre parcours moyen, tout se passe comme si toutes les particules présentes sur
l’axe, en x = 0, subissaient une collision, avec un centre diffuseur, après avoir parcouru la distance .
Le graphe correspondant Fn (x) est donc constitué de deux portions de droite (Fig. 15.12) :
Fn(x) = F n (0)
pour
x < et Fn (x) = 0
pour
x>
La valeur de est alors obtenue en écrivant que le nombre de particules qui atteindraient le détecteur
ne change pas :
∞
0
F n(x) d x =
∞
0
∞
Fn (x) d x
d’où
0
F n(0) d x =
0
Fn (0) exp −
x
L
dx
268
15. Diffusion de Rutherford. Notion de section efficace
On obtient, en simplifiant par Fn (0) et en intégrant :
∞
=L
0
exp −
dx
x
= L − exp −
L
L
x
L
∞
0
=L
Ainsi, le libre parcours moyen est relié à la section efficace totale par l’équation :
=
1
nv,d st
Dans le cas d’un élément de nombre de masse A, de masse volumique r, la relation entre r, n v,d
et A est simple : nv,d = NA r/A, NA étant le nombre de Avogadro.
Pour des électrons d’énergie cinétique 0, 1 MeV traversant une feuille d’aluminium (A = 27,
r = 2 700 kg . m−3 ), on a trouvé expérimentalement = 66 nm, ce qui permet d’en déduire la section
efficace totale : st = 2, 5 × 10 6 barn.
Remarque : La formule précédente n’est valable que pour des centres diffuseurs fixes. En thermodynamique statistique, dans l’étude des gaz, on introduit, de façon analogue, un libre parcours
moyen de particules, mais dans ce cas les centres diffuseurs sont eux-aussi en mouvement ; la formule reliant le libre parcours moyen
√ et la section efficace totale diffère alors
légèrement par un facteur numérique égal à 2 (cf. Thermodynamique).
IV . — APPLICATION AU POUVOIR D’ARRÊT DES MATÉRIAUX
L’énergie cédée aux électrons atomiques par une particule chargée qui traverse un matériau, durant
un trajet élémentaire de longueur d x, est proportionnelle à la perte d’énergie Q relative à une collision
et au nombre de collisions subies. Ce nombre est égal au nombre de centres diffuseurs contenus dans
le cylindre droit, de longueur d x, et de section égale à la section efficace de diffusion ; il vaut donc
n d d s d x.
Il en résulte que la perte d’énergie − d E , au cours du déplacement élémentaire d x, s’obtient en
sommant sur toutes les valeurs de Q :
−dE =
Q nv,d d s d x
Pour calculer cette intégrale, il faut exprimer d s en fonction de Q : rappelons l’expression de l’énergie
cédée par un projectile de masse m 1 à une particule cible de masse m2 (cf. chapitre 14) :
Q=
4m1m2
sin 2
(m1 + m2)2
x
2
m 1v20
2
soit, puisque dans le cas considéré m 1 = m 2 = m e et m = m e /2 :
Q=
1
m e v20 sin 2
2
Par conséquent :
1
x
d Q = m e v02 sin
2
2
et
d sR =
cos
x
2
x
m ev 20
dx =
sin x d x
2
4
1
2pK 2 d Q
K2
2
p
sin
x
d
x
=
m e v 20 sin 4 (x/2)
m e v02 Q2
269
Diffusion de Rutherford. Notion de section efficace
Il en résulte, en introduisant q2e = e2/(4pε 0 ) :
−
dE
= n v,d
dx
Q dsR =
2pq4e nv,d
m ev 20
Q max
Qmin
Q max
d Q 2pq 4e nv,d
=
ln
Q
Qmin
me v 20
Les bornes d’intégration, Qmax et Q min , représentent les pertes d’énergie maximale et minimale au
cours d’une collision. La contribution des grandes valeurs de Q est moins forte que celle des petites
valeurs, d’où le soin particulier qu’il convient d’apporter à la détermination de Q min . Alors que Q max
s’obtient aisément en remplaçant, dans l’expression de Q, x/2 par p/2, la détermination de Q min
exige que l’on abandonne le modèle simplifié d’une cible constituée par un électron atomique libre. Une
analyse plus fine montrerait que Qmin doit être pris égal à I 2 /(2me v 2 ), I étant une énergie associée à
l’ensemble des états des électrons atomiques appelée « potentiel moyen d’ionisation ».
CONCLUSION
Résumons les point importants.
(1) L’angle de diffusion de Rutherford et la section efficace différentielle correspondante ont pour
expressions respectives :
tan
x
|K |
|K |
=
=
2
2bE
mv 02b
ds
dV
et
=
R
1
K2
4
4
2
4m v0 sin (x/2)
(2) La section efficace totale dans le cas du modèle des sphères dures est : s t = pR 2.
(3) Enfin, le libre parcours moyen associé à un processus de diffusion par des centres diffuseurs
fixes est relié à la section efficace par l’équation :
=
1
nv,d st
c Dunod – Toute reproduction non autorisée est un délit
où nv,d est le nombre de centres diffuseurs par unité de volume.
Les exemples donnés et l’application au pouvoir d’arrêt des matériaux soulignent l’actualité et l’intérêt d’un tel sujet. Ces notions se développent et se généralisent naturellement en relativité et en quantique. On les retrouve d’ailleurs en thermodynamique dans l’interprétation microscopique des propriétés
macroscopiques des gaz (cf. Thermodynamique).
EXERCICES ET PROBLÈMES
P15– 1. Diffusion d’un proton par un noyau lourd
Un proton A 1 (masse m1 ) venant de l’infini, s’approche d’un noyau lourd immobile A 2 (masse
m2, nombre de protons Z) avec un paramètre d’impact b.
1. La quantité de mouvement du système est-elle conservée ? Commenter.
2. Exprimer le moment cinétique du système ainsi que son énergie, lorsque le proton est à l’infini
(vitesse v0) et lorsqu’il est en S, point où la distance au noyau est minimale (vitesse v s).
3. En déduire l’expression de la distance minimale s entre le proton et le noyau, en fonction du
rapport r0 de b sur l’énergie E m du proton. Application au cas où b = 1 pm, Em = 0, 1 MeV
et Z = 82.
270
15. Diffusion de Rutherford. Notion de section efficace
P15– 2. Diffusion d’un noyau d’hélium par un noyau de cuivre
Un noyau d’hélium, de vitesse v 0 = 106 m . s −1 , est diffusé par un noyau de cuivre immobile,
sous un angle x = p/2 dans le référentiel du centre de masse R ∗ .
Calculer la constante d’interaction K et le paramètre d’impact b, en pm, en supposant que la
diffusion est de type Rutherford.
P15– 3. Diffusion de particules a par une feuille d’argent
Dans l’expérience de diffusion de Rutherford, les particules a ont une énergie cinétique
E k,1 = 10 MeV. Calculer les paramètres d’impact correspondant aux angles de diffusion suivants :
2 ◦, 20◦ et 85 ◦.
P15– 4. Sections efficaces associées à différentes excitations
Les libres parcours moyens associés à la diffusion d’électrons incidents, à la suite de créations de
plasmons et d’excitations de transitions atomiques individuelles K, ont été déterminés expérimentalement dans de l’aluminium. Les résultats ont été les suivants : p = 314 nm, K = 100 mm.
En déduire les valeurs en barn des sections efficaces correspondantes, sachant que le nombre d’électrons participant à l’excitation est de trois par atome pour la création des plasmons et de deux par atome
pour l’excitation individuelle K.
P15– 5. Expression de la section de Rutherford
On considère la diffusion d’électrons d’énergie E 1 par des atomes cibles.
1. Donner l’expression de la section efficace différentielle de diffusion de Rutherford, par les
noyaux, en fonction de l’angle de diffusion u1 des électrons incidents. En déduire le rapport du flux
d’électrons diffusés, dans l’angle solide élémentaire 2p sin u 1 d u1 , sur la densité surfacique du flux
d’électrons incidents.
2. Même question si la diffusion est produite par les électrons atomiques.
P15– 6. Détection de particules a diffusées par de l’aluminium
Un faisceau de particules a, de densité surfacique de flux J n = 5 × 108 m −2 . s−1 , est diffusé sous un angle droit par une cible en aluminium, de masse 30 mg. Les particules a, d’énergie
E m = 12, 5 keV, sont, après diffusion, reçues par un détecteur placé à 50 cm de la cible.
1. Calculer le paramètre d’impact et la distance minimale d’approche des noyaux par les particules.
2. Quel est le flux des particules qui devraient atteindre la section du détecteur, d’aire A = 2, 5 cm 2 ,
selon le modèle de sphères dures de rayon égal à s ? On rappelle que le nombre de nucléons de l’aluminium est 27 et que la masse d’un nucléon vaut mn ≈ 1, 67 × 10−27 kg.
P15– 7. Détection d’électrons diffusés par une feuille métallique
On bombarde une feuille mince métallique à l’aide d’un faisceau d’électrons uniforme, parallèle et
monoénergétique d’énergie cinétique E1 (Fig. 15.13). Les particules incidentes subissent une diffusion
de type Rutherford avec les électrons atomiques de la feuille. On désigne par In l’intensité particulaire
du faisceau incident ; nv,d est le nombre d’électrons diffuseurs par unité de volume, e l’épaisseur
uniforme de la feuille et S sa section.
271
Diffusion de Rutherford. Notion de section efficace
Quel est, par unité de temps, le nombre d’électrons diffusés que reçoit un détecteur annulaire, de
rayon r, de largeur faible w et tel que chacun de ses points est situé à une distance L du centre de
diffusion ?
w
L
F IG . 15.13.
P15– 8. Atténuation d’un faisceau d’électrons
Un faisceau d’électrons traverse une cible contenant n v = 8 × 1028 atomes . m−3 . On suppose
que chaque atome se comporte comme une sphère dure de rayon R. Sachant que, pour une épaisseur
x1 = 15 mm de la cible, seulement 1% des électrons n’ont pas été diffusés, trouver la valeur de R en
pm. En déduire la section efficace totale et le libre parcours moyen correspondant ?
P15– 9. Diffusion et rayonnement d’une particule chargée
Une particule chargée A (masse m) est soumise, de la part d’un centre de force O, situé à l’origine d’un référentiel galiléen R = Oxyz, à une force attractive de la forme F = (K/r 2) e r, K étant
une constante négative et er le vecteur unitaire défini par le vecteur position OA.
1. Quelles sont les trois constantes du mouvement ?
c Dunod – Toute reproduction non autorisée est un délit
2. La particule est, en outre, soumise à une force de freinage de la forme F f = mt d a/ d t due au
rayonnement électromagnétique qu’elle émet, t étant une durée caractéristique. Quelle est l’équation
différentielle vectorielle à laquelle doit satisfaire le moment cinétique LO, en O, si F f F ?
Dans le cas où, en l’absence de F f , la trajectoire serait un cercle de rayon r 0, trouver r(t) sachant
que r = r0 à t = 0.
16
Cinématique du solide et des solides en contact
La cinématique du solide, précisément du corps rigide, c’est-à-dire d’un système indéformable,
tient une place importante dans les applications quotidiennes de la mécanique, en raison de la large
validité de l’approximation que constitue le solide rigide. Son intérêt dépasse largement le cadre du
seul solide puisque la plupart des mécanismes utilisés dans la vie courante sont constitués de solides en
contact.
I . — CINÉMATIQUE DU SOLIDE
Dans la suite, on désignera brièvement par solide S un ensemble de points dont les distances
mutuelles ne varient pas au cours du temps ; S est donc un corps rigide ou indéformable. Ajoutons
qu’il importe peu qu’un tel solide soit rempli ou non de matière : trois points quelconques, situés à des
distances mutuelles invariables, définissent le solide S .
Évidemment, cette définition géométrique est réductrice, car le solide est d’abord un état de la
matière qui ne se réduit pas à la schématisation précédente ; il se déforme s’il est soumis à une contrainte
ou si sa température augmente. On le représente plus précisément par un ensemble d’oscillateurs dont
les positions moyennes restent fixes les unes par rapport aux autres et sont régulièrement disposés dans
l’espace. Cependant, pour étudier le mouvement de S par rapport à un référentiel R, on lui substituera
un repère d’espace R = O x yz , invariablement lié à S (Fig. 16.1).
Comme trois points A , B , C de S ou de R , non alignés, suffisent pour déterminer la position
du solide, S possède 6 degrés de liberté, c’est-à-dire 6 paramètres de position indépendants qu’il est
nécessaire de connaître pour déterminer sa position par rapport à R (cf. chapitre 2).
z
z
S
O
x
y
O R
y
x
R
F IG . 16.1.
273
Cinématique du solide et des solides en contact
I . 1 . — Champ des vitesses d’un solide
Considérons deux points quelconques A et B invariablement liés à un solide S. La norme du
vecteur AB étant une constante au cours du mouvement, il vient, relativement à R :
d(AB2 )
d AB
d(AB2 )
= 0 soit AB ·
= AB · (vB/R − vA/R ) = 0
=
dt
dt
dt
Ainsi, les vitesses de deux points d’un solide satisfont à la propriété d’équiprojectivité des champs de
vecteurs antisymétriques (cf. chapitre 1) :
AB · v A/R = AB · v B/R
On montre que cette propriété implique un champ des vitesses de solide de la forme :
v B/R = v A/R + BA × VS/R
ou
vB/R = vA/R + V S/R × AB
VS/R étant le vecteur vitesse de rotation du solide S par rapport à R, noté parfois simplement V
s’il n’y a aucune confusion possible. Le champ des vitesses d’un solide est donc le moment du torseur
[V, vA/R] (cf. chapitre 1).
Remarque : La relation précédente s’écrit aussi, pour deux points voisins A et A :
v(A ) − v(A) = V × AA
soit
dv = V ×dr
L’opérateur V× qui agit sur la différentielle d r est un tenseur, d’ordre 2, car d v et d r
ne sont pas colinéaires ; il s’explicite dans une base orthonormée selon une matrice carrée
à 9 éléments dont la diagonale est nulle (cf. chapitre 2). Cet opérateur est parfois appelé
tenseur-gradient du vecteur v , par analogie avec le gradient d’une fonction scalaire f :
d v = t-grad v · d r
d f = grad f · d r
comme
I . 2 . — Différents mouvements d’un solide
c Dunod – Toute reproduction non autorisée est un délit
a) Translation d’un solide
Un solide S a un mouvement de translation par rapport à un référentiel R si le vecteur construit
à partir de tout couple ordonné de deux points A et B de S reste équipollent à lui-même au cours du
mouvement (Fig. 16.2). Le vecteur AB est donc constant dans R. Par conséquent :
d AB
dt
=0
d’où
vB/R = vA/R
et
VS/R = 0
R
Ainsi, tous les points de S ont même vitesse et donc même accélération par rapport à R ; cependant,
cette même vitesse et cette même accélération peuvent évoluer de façon quelconque.
b) Rotation d’un solide autour d’un axe
Dans le mouvement de rotation d’un solide S autour de l’axe Oz de R, les points situés sur cet
axe ont une vitesse nulle (Fig. 16.3). La vitesse d’un point A de S s’écrit donc :
vA/R = AO × VS/R
ou
v A/R = V × OA
274
16. Cinématique du solide et des solides en contact
z
t2
t1
B S
A
O
z
B S
A
y
t3
B
S
H
vA
et
Ω
A
y
O
'
x
A
R
x
F IG . 16.2.
P
R
F IG . 16.3.
D’autre part, comme A décrit un cercle de rayon AH, H étant la projection de A sur Oz, sa vitesse
est v A/R = (d s/ d t) et = AH w˙ e t . La comparaison des deux expressions de vA/R montre que V est
un vecteur parallèle à l’axe de rotation Oz dont l’orientation est donnée par la règle du tire-bouchon
(cf. chapitre 2) ; sa mesure suivant Oz est ẇ :
V = ẇ e z
Si ẇ > 0, la rotation a lieu dans le sens direct Ox → Oy ; si ẇ < 0, la rotation a lieu dans le sens
inverse Oy → Ox.
Exemple : La Lune peut être considérée comme un solide ayant un mouvement de rotation, autour
de son axe de révolution, caractérisé par le vecteur vitesse angulaire de rotation VL (Fig. 16.4). En outre,
son centre décrit une trajectoire sensiblement circulaire autour de la Terre, avec une période sidérale
de TL = 27, 3 jours (cf. Exercices, chapitre 3). Ce mouvement est remarquable car cette période de
révolution TL coïncide avec la période de rotation 2p/V L, de sorte que la Lune présente toujours la
même face à la Terre.
z
ΩL
S
Lune
Terre
vH
vA
H
vP
A
Ω
O
x
F IG . 16.4.
P
y
F IG . 16.5.
c) Mouvement hélicoïdal d’un solide
Considérons un solide S dont le mouvement est tel que tout point A de S tourne autour d’un
axe Oz et, en même temps, se déplace suivant cet axe. Comme OA = OH + OP (Fig. 16.5), on a, par
rapport à R :
vA/R = vH/R + vP/R avec vH/R = v H ez
Or la vitesse de P, projection de A sur Oxy, s’écrit : v P/R = VS/R × OP = V × HA. Il en résulte :
vA/R = v H/R + AH × V S/R
275
Cinématique du solide et des solides en contact
d) Mouvement le plus général d’un solide
On a vu que, quels que soient les points A et B d’un solide S, on avait toujours, par rapport au
référentiel R :
vB/R = v A/R + BA × V
Cherchons l’ensemble des points H tels qu’à un instant donné vH/R soit parallèle à V :
vH/R = lV = vA/R + HA × V
Pour simplifier, explicitons cette relation dans une base, tel que V soit porté par l’axe Oz. Il vient :
0
0
lV
0
ẋA
xA − x H
= ẏA + yA − y H × 0
V
ż A
zA − z H
soit
yH = y A + ẋ A/v
xH = x A − ẏ A/v
V = ż A/l
On obtient donc une droite parallèle à VS/R , appelée axe central. Il en résulte, H étant un point de
l’axe central D :
vA/R = lV + AH × V
i) Si, à un instant t, V = 0, le mouvement est dit tangent à un mouvement de translation.
ii) Si, à un instant t, V = 0 et v H/R = 0, il est dit tangent à une rotation d’axe D.
iii) Si, à un instant t, V = 0 et v H/R = 0, il est dit tangent à un mouvement hélicoïdal d’axe
instantané de rotation D.
e) Angles d’Euler
c Dunod – Toute reproduction non autorisée est un délit
Si un solide S a un point fixe O dans R, sa position par rapport à R dépend de trois paramètres
indépendants qui sont ses degrés de liberté. Rappelons que l’on appelle ainsi le nombre de paramètres
qu’il faut se donner pour déterminer la position d’un système. Il est commode d’associer au solide le
repère R = Ox y z.
Il est commode de prendre comme paramètres les angles d’Euler c, u, f, définis comme suit
(Fig. 16.6). Notant Ou l’intersection des plans Oxy et Ox y , appelée ligne des nœuds, c = (Ox, Ou)
est l’angle de précession, u = (Oz, Oz) l’angle de nutation et f = (Ou, Ox ) l’angle de rotation
propre.
z
θ
w
y
z
φ
θ
S
v
ψ
O
x
ψ
φ
u
y
x
F IG . 16.6.
Remarque : Dans les ouvrages anglo-saxons, l’angle de précession est généralement noté f et l’angle
de rotation propre c.
276
16. Cinématique du solide et des solides en contact
Afin de faciliter l’interprétation physique de ces angles c, u, f, représentons le solide S par une
toupie. Le vecteur vitesse de rotation de S par rapport à R est la somme vectorielle des trois vecteurs
vitesses de rotation. On sait en effet que les vecteurs vitesses de rotation s’ajoutent vectoriellement
(cf. chapitre 3) :
V = ċ e z + u̇ e u + ḟ ez
L’obtention des expressions de V S/R , en fonction des angles d’Euler, dans les bases liées à R et R ,
n’est pas immédiate. En effet, dans les deux cas, un seul des trois vecteurs unitaires e u, e z ou e z est
vecteur de base de R et R.
Exprimons e u et e z , en fonction des vecteurs de base de R (Fig. 16.7) :
eu = e x cos c + ey sin c
et ez = ez cos u − ev sin u
avec
ev = −e x sin c + ey cos c
On en déduit les composantes du vecteur V dans la base de R selon :
R
u̇ cos c + ḟ sin c sin u
u̇ sin c − ḟ cos c sin u
ḟ cos u + ċ
y
z
ez
eu
ev ψ
θ
y
ψ
O
O
x
O
v
x
F IG . 16.7.
Pour avoir les composantes de V dans la base de R , exprimons eu et e z en fonction des vecteurs
de base de R (Fig. 16.8) :
eu = e x cos f − ey sin f
et e z = e w sin u + ez cos u
On obtient :
R
y
O
ew = ex sin f + ey cos f
u̇ cos f + ċ sin u sin f
− u̇ sin f +ċ sin u cos f
ċ cos u + ḟ
z
φ
avec
θ
y
ez
O
φ
ew
O
x
w
eu
x
F IG . 16.8.
Si le solide présente la symétrie de révolution, autour de l’axe Oz par exemple, il est commode d’utiliser la base (eu , ew , ez ), dite base de Resal Re (du nom de l’ingénieur français
H. Resal). Il suffit d’exprimer e z dans cette base. Comme on a : e z = ew sin u + e z cos u, V s’explicite dans la base de Resal selon :
u̇
ċ sin u
R e ċ cos u + ḟ
277
Cinématique du solide et des solides en contact
Remarque : On aura besoin ultérieurement de distinguer VS/R et le vecteur de rotation V Re/R de
la base de Resal par rapport à R, lequel vaut :
VRe /R = u̇ eu + ċ ez = VS/R − ḟ ez
De ce qui précède, on déduit aisément les différentes projections de V Re /R dans les
différentes bases de R, R et R e . Il suffit de supprimer le terme en ḟ = 0 dans
VS/R .
II . — CINÉMATIQUE DES SOLIDES EN CONTACT
II . 1 . — Vitesse de glissement
Considérons deux solides S 1 et S2 en mouvement par rapport à un référentiel R de telle sorte
que leurs surfaces soient en contact. Pour simplifier, supposons que le contact soit ponctuel (Fig. 16.9a).
Nous devons distinguer au contact de S1 et S 2 trois points :
i) le point géométrique I de contact,
ii) le point I 1 du solide S 1 qui coïncide avec I à l’instant considéré,
iii) le point I 2 du solide S 2 qui coïncide avec I au même instant.
I
y
O
x
I
S1
z
I1
I1
I2
I2
R
a)
S2
Q
b)
F IG . 16.9.
c Dunod – Toute reproduction non autorisée est un délit
Un exemple concret de cette vitesse de glissement est fourni par le contact des deux roues en
rotation (Fig. 16.9b) : le point géométrique est fixe alors que les points I 1 et I2 , qui appartiennent
respectivement aux roues 1 et 2, ont des vitesses a priori non nulles et différentes.
Par définition, on appelle vitesse de glissement de S 1 sur S 2, notée v g ou v 1/2 , la vitesse de I1
par rapport à S 2 :
v1/2 = vI1 /S2
D’après la composition des mouvements de I1 entre les référentiels R et S2, on a :
vI 1/R = v I1 /S2 + ve = v I 1/S2 + vI2/R
puisque ve est ici la vitesse du point I2 de S 2 qui coïncide avec I (cf. chapitre 3). Retenons donc :
v1/2 = vI 1/S 2 = v I 1/R − v I2 /R
Remarque : Notons que la vitesse du glissement ne dépend que des solides en contact ; elle est donc
indépendante du référentiel par rapport auquel S 1 et S 2 sont en mouvement.
278
16. Cinématique du solide et des solides en contact
La vitesse de glissement est contenue dans le plan tangent Q commun à S 1 et S 2. Pour le
montrer, exprimons de deux manières la vitesse du point géométrique I par rapport à R , en composant
les vitesses successivement avec S1 et S 2 . Il vient, d’après la définition de la vitesse d’entraînement :
v I/R = v I/S2 + vI2 /R = v I/S1 + vI 1/R
d’où
v 1/2 = vI/S 2 − vI/S 1
Comme vI/S 1 et vI/S2 appartiennent tous deux au plan tangent, il en est de même pour la vitesse de
glissement.
Il n’y a pas de glissement si v 1/2 = 0. Notons que, dans le cas particulier où S 2 est fixe par
rapport à R (vI2 /R = 0), l’absence de glissement se traduit par : v I 1/R = 0.
II . 2 . — Exemples
a) Disque vertical en contact avec un plan
Exprimons la vitesse de glissement v 1/2, d’un disque vertical évoluant sur un axe d’un plan,
en fonction des deux paramètres xK , coordonnée du centre K du disque et u , angle de rotation
(Fig. 16.10). Désignant par R le référentiel lié au plan, il vient, avec les notations de la figure :
v1/2 = v I1/R − vI 2 /R
soit, puisque les points I1 et K appartiennent au même solide et vI2 /R = 0 :
v1/2 = vI1/R = v K/R + I 1 K × V1/R
en désignant par V1/R le vecteur vitesse de rotation de S 1 par rapport à R.
y
K
r
O
R
O
y
R
x
R
I1 θ
I 2 xC
K
µ
S1
I1
®
y
Á
I2
S2 x
x
F IG . 16.11.
F IG . 16.10.
Comme v K/R = ẋK ex et V1/R = u̇ e z, la vitesse de glissement s’explicite dans la base de R
selon :
0
0
ẋK
ẋK + r u̇
0
=
0 + r ×
0
0
0
0
u̇
R
R
R
R
Dans le cas du roulement sans glissement :
v1/2 = 0
d’où
ẋK + r u̇ = 0
279
Cinématique du solide et des solides en contact
Par intégration, on obtient DxK = −r Du, ce qui exprime, au signe près, l’égalité des longueurs parcourues par le point géométrique I sur le disque et sur la droite ; le signe moins traduit seulement la
diminution de l’angle u lorsque l’abscisse de K augmente.
b) Disque en contact ponctuel avec un guide circulaire en mouvement
Exprimons la vitesse de glissement v 1/2 du disque en contact avec le guide, en fonction des trois
paramètres, a, u et f, représentés sur la figure 16.11 ; u et f fixent la position d’un point du disque
S1 et a celle du guide S 2 par rapport au référentiel R . On a v 1/2 = vI 1 /R − vI2 /R où
vI1 /R = v K/R + V1 × KI1
et vI 2/R = vO/R + V2 × OI2 = V2 × OI2
puisque, d’une part, I1 et K appartiennent au solide S 1, d’autre part, I 2 et O appartiennent au solide
S2 ; V1 et V2 sont les vecteurs vitesse de rotation des solides S1 et S 2 par rapport à R.
Avant d’expliciter v 1/2 dans la base tournante (e x , ey , e z), il convient de noter que la vitesse de
rotation du disque S1 par rapport à R a pour expression :
V1 = V1/R + VR /R = (u̇ + ḟ) ez
puisque ḟ ez est le vecteur vitesse de rotation du disque par rapport à R et u̇ e z est celui de la tige
immatérielle OK, liée à R par rapport à R. Quant à V 2 = ȧ e z il représente le vecteur vitesse de
rotation du guide par rapport à R. Cela dit, v1/2 s’explicite dans la base de R selon :
R
0
0×
u̇
R
0
R−r
r
0 +
0
0
×
0
(
u̇
+
ḟ)
R
R 0
−
R
0
0
R
0 ×
0 =
(R − r)u̇ + r( u̇ + ḟ) − Ra˙
ȧ R 0 R
0
Ainsi :
v = (R u̇ + rḟ − Rȧ) ey
c Dunod – Toute reproduction non autorisée est un délit
S’il n’y a pas de glissement, v = 0 d’où R(ȧ − u̇) = r ḟ. Si le guide est fixe par rapport à R (ȧ = 0),
la condition précédente se réduit à Ru˙ = −r ḟ.
II . 3 . — Roulement avec pivotement
Par rapport au solide S 2, la vitesse d’un point quelconque A 1 de S 1 s’exprime en fonction de
celle du point I1, appartenant à S 1, qui coïncide avec I , et de la vitesse de rotation V1/2 de S 1 par
rapport à S2 (Fig. 16.12a) :
v A1 /S2 = vI1 /S2 + A1I × V1/2 = v 1/2 + A 1I × V1/2
Le vecteur V1/2 peut être considéré comme la somme :
i) d’un vecteur V t , situé dans le plan tangent Q commun aux deux solides en I , appelé vitesse
angulaire de roulement,
ii) et d’un vecteur V n, normal à Q, appelé vitesse angulaire de pivotement. ,
Sur la figure 16.12b, on a représenté les vecteurs roulement et pivotement de la roue avant d’une
bicyclette sur le sol.
280
16. Cinématique du solide et des solides en contact
Ωn
Q
Ω1/2
A1
S1
I
Ωt
S2
Pivotement Ω n
Roulement Ωt
a)
b)
F IG . 16.12.
II . 4 . — Application au différentiel d’un véhicule
Le différentiel d’un véhicule est un système mécanique qui permet aux roues d’un même essieu de
parcourir des longueurs différentes, lorsque la trajectoire du véhicule n’est pas rectiligne (Fig. 16.13a).
Il peut être schématisé par la figure 16.13b, dans laquelle on distingue :
i) le carter, auquel est associé le référentiel R = Oxyz lié au véhicule,
ii) le boîtier ou coquille représenté par le référentiel R = Oxy z ; R tourne autour de Oz
avec la vitesse angulaire de rotation V0 grâce à un pignon d’attaque qui entraîne le différentiel par la
couronne ;
iii) les planétaires, disques identiques de rayon r, de vitesses angulaires par rapport à R, V 1 et
V2, qui commandent chacune des roues,
iv) le satellite, disque métallique de rayon s et d’axe Ox , qui s’appuie sur les planétaires ; il est
entraîné par le boîtier et peut en outre tourner autour de son axe à la vitesse de rotation V s par rapport
à R.
x
Roue 2
x
Différentiel
R (carter)
Ωs
Roue 1
I2
M2 N2
Ω2
Roue 2
z
Planétaires
Ω1
P2 Ω
2
Planétaire 2
y
y
a)
Satellite
I1
S N M
1
1
Roue 1
O
P1 Ω
1
Ω0
Planétaire 1
R0 (boîtier)
b)
F IG . 16.13.
Traduisons le roulement sans glissement du satellite en contact avec les planétaires. Désignons par
N1 et N 2 les points du satellite en contact respectivement avec les points M 1 et M2 des planétaires
aux points géométriques I1 et I 2 . Il vient, relativement à R, en appelant P1 et P 2 les centres de
planétaires :
vM 1 = M1 P1 × V 1 et v M2 = M2P 2 × V 2
D’autre part :
v N1 = v S + N 1S × (V s + V0) et vN 2 = vS + N 2S × (V s + V0 )
où (V s + V 0) représente le vecteur vitesse de rotation du satellite par rapport à R. Or, les points O
et S étant à une distance constante l’un de l’autre, vS = SO × V 0 .
281
Cinématique du solide et des solides en contact
En raison du roulement sans glissement, v M1 = v N 1 et vM 2 = vN2 . Par conséquent,
M1P 1 × V1 = SO × V 0 + N 1S × (V s + V0)
et M2 P2 × V2 = SO × V0 + N 2 S × (V s + V 0)
En ajoutant ces deux équations, on trouve, puisque M1 P1 = M2 P2 = SO et N 1 S = −N2S est
colinéaire à V 0 :
M1P1 × (V1 + V2 ) = 2SO × V0
V1 + V2
= V0
2
d’où
Ainsi, la demi-somme des vitesses angulaires des planétaires est égale à la vitesse angulaire du boîtier.
Dans la base de R , les deux équations vectorielles traduisant le roulement sans glissement s’explicitent
suivant :
0
0
0
(Vs + V0)
−r
−r
0 × 0 = 0 × 0 + 0 ×
0
0
0
0
V1
V0
−s
0
0
0
(Vs + V 0)
−r
−r
0 × 0 = 0 × 0 + 0 ×
0
0
0
0
V2
V0
s
et
Il en résulte :
s
s
V 1 = V 0 − (Vs + V0) et V2 = V 0 + (Vs + V0 )
r
r
Notons que, si Vs = 0, les vitesses angulaires V 1 et V2 sont différentes, ce qui permet aux roues
d’un même essieu de parcourir des trajets différents, comme cela est nécessaire dans les virages.
III . — MOUVEMENTS PLANS D’UN SOLIDE
III . 1 . — Définition
On appelle mouvement plan d’un solide S un mouvement tel que chaque point de S se déplace
dans un plan parallèle à un plan Q fixe dans le référentiel considéré R. La section du solide par le
plan Q est donc une figure qui évolue, dans R, sans se déformer. L’étude du mouvement de cette figure
détermine sans ambiguïté la position de S, d’où son intérêt. La figure 16.14 représente un cylindre en
mouvement dans le plan Oxy qui coïncide avec un plan de section droite.
y
c Dunod – Toute reproduction non autorisée est un délit
y
R
O
O
S
A
x
x
z
z
x
F IG . 16.14.
III . 2 . — Centre instantané de rotation
Soient Q = Oxy le plan fixe et Q = Ox y le plan invariablement lié à la section de S par Q.
La vitesse d’un point A de Q, par rapport à R, s’écrit donc :
vA/R = v O/R + V × O A
où V, vecteur vitesse de rotation de S par rapport à R, est porté par la normale au plan de la figure.
On appelle centre instantané de rotation , brièvement C.I.R, du plan Q , à la date t, le point I de S
dont la vitesse, par rapport à R, est nulle :
vI/R = 0
d’où
vA/R = vI/R + V × IA = V × IA
282
16. Cinématique du solide et des solides en contact
Ainsi, le mouvement du plan Q , par rapport au plan Q, est tangent à un mouvement de rotation autour
de l’axe perpendiculaire en I à Q.
III . 3 . — Base et roulante
On appelle base et roulante les ensembles de points occupés par le C.I.R, respectivement dans les
plans Q et Q .
a) Mouvement plan d’un cylindre qui roule sans glisser sur le sol
Dans le plan de section transversale, le mouvement se ramène à celui d’un disque en contact ponctuel avec une droite (Fig. 16.15). Comme le point du disque, qui est en contact avec la droite, a une vitesse nulle en raison du roulement sans glissement, le centre instantané de rotation est précisément ce
point. La base, lieu géométrique du C.I.R dans Q, est cette droite. La roulante, lieu géométrique du
C.I.R dans Q, est le périmètre du disque.
y
B
y
Roulante
Q
O
O
Mur
y
A
x
I
Q
K
Base
x
Sol
F IG . 16.15.
O
A
x
F IG . 16.16.
b) Barre contre un mur
Considérons une barre, de longueur l , en contact par ses extrémités A et B avec deux plans
perpendiculaires Ox et Oy (Fig. 16.16). On a, I étant le C.I.R :
vA/R = V × IA et vB/R = V × IB
Il en résulte, puisque vA/R et v B/R sont respectivement portés par les axes Ox et Oy, que le C.I.R
est l’intersection des demi-droites Ay et Bx. On voit alors aisément que la base est le cercle de centre
O et de rayon l, et que la roulante est le cercle de centre K , milieu de la barre, et de rayon l/2.
CONCLUSION
Retenons deux résultats pratiques importants.
(1) Le champ des vitesses d’un solide S s’exprime par la relation vectorielle suivante, entre les
vitesses de deux points quelconques A et B de S par rapport à un référentiel R :
vA/R = vB/R + AB × VS/R = v B/R + V S/R × BA
VS/R étant le vecteur vitesse de rotation de S par rapport à R.
(2) La vitesse de glissement entre deux solides S 1 et S2 en contact est :
v1/2 = v I 1/S2 = vI1 /R − vI2 /R
I 1 et I2 étant les points appartenant à chacun des solides qui coïncident, à l’instant considéré, avec le
point géométrique I de contact ; la condition de roulement sans glissement est : v1/2 = 0.
Bien qu’approché, le modèle du corps indéformable joue un rôle capital, en raison de ses nombreuses applications techniques en cinématique des solides en contact.
283
Cinématique du solide et des solides en contact
EXERCICES ET PROBLÈMES
P16– 1. Mise en rotation d’un plateau
Un plateau, de rayon R, est mis en rotation, autour d’un axe Oz, par un disque, de rayon r, qui
roule sans glisser sur le pourtour du plateau (Fig. 16.17). L’axe du disque est une tige, passant par le
point O1 de Oz, parallèle au plateau, et tournant autour de Oz avec une vitesse angulaire V 0.
1. Établir la relation entre V 0, la vitesse de rotation du plateau V p et celle du disque V.
2. Exprimer la vitesse du point H le plus haut du disque. Cas particulier où le plateau est bloqué.
y
z
Ω3
Ω0
O1
O
K
C3
O
Ω
Ω1
C1
Ωp
F IG . 16.17.
Ω2
C2
x
F IG . 16.18.
P16– 2. Roulements à billes
La figure 16.18 représente trois cercles matériels, C 1 , C2 , C3 , en contact entre eux, qui roulent
sans glisser dans leur plan. On désigne par r 1 et r 2 les rayons de C 1 et C 2, et par K le centre de C 3.
Établir l’équation qui relie leurs vitesses angulaires V 1, V 2 et V 3 par rapport au référentiel du
laboratoire R = Oxyz.
P16– 3. Mise en rotation d’un disque à partir d’un axe incliné
c Dunod – Toute reproduction non autorisée est un délit
Pour faire tourner un disque autour de son axe de révolution Oz, à partir d’un axe incliné Oz ,
on utilise un cône qui roule sans glisser sur le disque. Par rapport à un référentiel R = Oxyz, le cône,
de demi-angle au sommet g, tourne autour de Oz fixe dans R avec la vitesse angulaire Vc. On
désigne par V d la mesure algébrique sur Oz du vecteur vitesse de rotation du disque par rapport à R
(Fig. 16.19).
1. Exprimer, en un point I de la génératrice de contact situé à la distance d de O, la condition de
roulement sans glissement.
2. Quelle doit être la valeur de g pour que le rapport V d/V c soit égal à 0,5 ?
z
z
.
ψ
Ωd
z
Ωc
O
y
O
γ
I
x
φ
z
x
F IG . 16.19.
.
F IG . 16.20.
y
284
16. Cinématique du solide et des solides en contact
P16– 4. Cône roulant sans glisser sur un plan
Un cône, de demi-angle au sommet g , est en contact suivant l’une de ses génératrices avec un plan
horizontal Oxy, fixe dans le référentiel du laboratoire R, et roule sans glisser sur Oxy (Fig. 16.20).
1. Exprimer le vecteur vitesse de rotation V du cône par rapport à R , en fonction de la vitesse de
précession ċ et de la vitesse de rotation propre ḟ.
2. Représenter géométriquement V. En déduire la relation entre V, ċ et g.
P16– 5. Entraînement d’un plateau circulaire
Un plateau circulaire P, de rayon R, est mis en rotation autour de son axe, grâce à un système
constitué d’une tige T , de demi-longueur l, aux extrémités de laquelle sont articulés deux disques
identiques D1 et D2 de rayon r. La tige est perpendiculaire à l’axe de rotation et son centre est situé
sur cet axe sous le plateau, à une distance r de P, de telle sorte que D 1 et D2 soient en contact
avec P (Fig. 16.21). Le plateau, la tige et les deux disques sont des solides homogènes. On désigne par
ċ et u̇, les vitesses de rotation de P et de T par rapport au référentiel du laboratoire R = Oxyz et
on appelle ḟ1 et ḟ 2 les vitesses de rotation de D1 et D2 par rapport à T .
1. Quelles sont les expressions des vecteurs rotations V 1 et V2 de D 1 et D2 par rapport à R ?
Que se passe-t-il si l’on bloque le mouvement de la tige ?
2. Écrire les équations, reliant ċ, u̇, ḟ1 et ḟ 2, qui traduisent le roulement sans glissement de
D1 et D2 sur P ? En déduire une relation entre ḟ 1 et ḟ 2 .
3. On bloque le plateau. Que deviennent V 1 et V 2 ? Représenter géométriquement ces vecteurs.
z
Couronne
.
ψ
I2
.
P
O
φ2
D2
x
y
I1
H
.
θ
y
K
T
D1
Satellite
O
θ
.
φ1
F IG . 16.21.
ϕ
x
F IG . 16.22.
P16– 6. Roulement sans glissement d’un disque-satellite sur un solide-couronne
Un disque-satellite (centre K, rayon r), mobile autour de son axe de révolution, roule sans glisser,
grâce au porte-satellite OK, sur un solide-couronne, de rayon R, fixe par rapport au référentiel du
laboratoire R (Fig. 16.22). Initialement, les angles u et f sont nuls.
Établir la relation entre u et f sachant que R/r = 4.
P16– 7. Base et roulante dans le mouvement d’un disque sur un axe
Un cylindre se déplace le long d’un axe horizontal de telle sorte que son plan médian soit toujours
contenu dans un plan vertical. Sa vitesse angulaire est V = −V e z (V > 0) et la vitesse de son centre
K est v0 (Fig. 16.23).
1. Trouver la base et la roulante du mouvement sachant que le cylindre roule et glisse sur l’axe des x.
2. Étudier le cas du roulement sans glissement.
285
Cinématique du solide et des solides en contact
D1
y
Ω
y
Ω
x
r
I1
D2
K
H
K
Ωs
I2
x
O
F IG . 16.23.
F IG . 16.24.
P16– 8. Mise en rotation de deux disques coaxiaux
Deux disques coaxiaux horizontaux, D 1 et D2, sont mis en mouvement par le roulement sans
glissement d’une roue verticale, de rayon r, qui tourne autour de son axe et dont le centre décrit un
cercle (Fig. 16.24). La vitesse angulaire de la roue autour de son axe est Vs et la vitesse angulaire de la
tige HK, de longueur b, qui relie le centre de la roue à l’axe des disques est V.
Trouver, en fonction de r, b, V s et V, les vitesses angulaires ḟ1 et ḟ2 des deux disques.
Commenter.
P16– 9. Bille roulant sans glisser sur un rail diédrique
Une bille sphérique (rayon r) roule sans glisser sur un rail à section
droite en forme de dièdre droit (Fig. 16.25). Établir la relation entre la vitesse
vK du centre de la bille et sa vitesse de rotation V.
Bille
K
ω
J
Rail
I
Ω
c Dunod – Toute reproduction non autorisée est un délit
F IG . 16.25.
17
Éléments cinétiques des systèmes matériels
Nous nous proposons de déterminer le centre de masse des systèmes matériels quelconques, déformables ou non, ainsi que la répartition géométrique des masses, afin d’exprimer simplement les concepts
cinétiques (quantité de mouvement, moment cinétique, énergie cinétique) qui apparaissent dans l’expression des lois de la dynamique des systèmes, notamment dans le cas de solides.
I . — CENTRE DE MASSE D’UN SYSTÈME MATÉRIEL
En mécanique newtonienne, la masse d’un système matériel S d présente la propriété d’additivité :
la masse d’un ensemble discret de N corps ponctuels est la somme des masses des différents corps
(Fig. 17.1a) :
N
M=
mi
i=1
Si le système S d peut être assimilé à une distribution continue de masse, on obtient sa masse totale
en calculant l’intégrale de volume suivante :
M=
r(A) d
dans laquelle r(A) est la masse volumique du système au point A et
nant l’ensemble des masses (Fig. 17.1b).
dl
A1
A2
a)
Ai
le domaine volumique conte-
S
d
A
b)
´
S
c)
d)
F IG . 17.1.
Si la distribution de masse est répartie le long d’un fil, de section transversale constante s de
diamètre très faible devant la longueur du fil (Fig. 17.1c), on introduit la masse linéique rl (A) = r(A)s
287
Éléments cinétiques des systèmes matériels
et la longueur d l = d
/s d’un élement de fil :
M=
r(A) d
rl (A) d l
=
C
De même, si la distribution de masse est répartie sur une surface, d’épaisseur e très faible devant
les dimensions transversales de la surface (Fig.17.1d), on introduit la masse surfacique rs(A) = r(A)e
et l’aire d s = d /e d’un élement de surface :
r(A) d
M=
=
S
rs(A) d S
Remarque : En mécanique relativiste, la masse conserve la propriété d’être constante, pour un système
fermé évidemment, mais perd celle d’additivité. Elle conserve aussi la propriété d’invariance par changement de référentiel galiléen (cf. Relativité et invariance).
I . 1 . — Définition du centre de masse
On appelle centre de masse d’un système matériel quelconque Sd le barycentre des différents
éléments de Sd affectés de leur masse respective.
Ainsi, le centre de masse d’un système de N corps ponctuels est le point C défini par :
1
OC =
M
N
N
m i OA i
m i CA i = 0
ou
i=1
i=1
où O est une origine quelconque et M la masse totale du système.
Si la distribution de masse est continue, les relations précédentes deviennent :
OC =
1
M
OA r(A) d
CA r(A) d
ou
=0
Si la distribution de masse est répartie le long d’un fil, on a :
c Dunod – Toute reproduction non autorisée est un délit
OC =
1
M
OA rl(A) d l
CA rl (A) d l = 0
ou
C
C
De même, si la distribution de masse est répartie sur une surface S :
OC =
1
M
S
OA r s(A) d S
ou
S
CA rs (A) d S = 0
Remarques : (1) Rappelons que la définition du centre de masse n’exige pas au préalable celle de la
gravité ou de la pesanteur (cf. chapitre 13) ; ainsi, dans des expériences newtoniennes sur
les collisions, on compare des masses alors que la gravitation n’intervient pas (cf. chapitres 14 et 21). Dans certaines expériences didactiques, on compare des masses en neutralisant le rôle du poids, grâce à une table horizontale à coussin d’air. Dans une cabine
spatiale, cette neutralisation du poids s’opère automatiquement par la force d’inertie d’entraînement. Cependant, on mesure le plus souvent les masses en comparant les poids des
corps, lesquels sont proportionnels aux masses, en un même lieu (cf. chapitre 7).
(2) On allégera parfois l’écriture en n’utilisant que le signe S pour traduire les différentes
sommations discrète ou continue.
288
17. Éléments cinétiques des systèmes matériels
I . 2 . — Propriétés du centre de masse
a) Associativité
Si l’on note Ck les centres de masse de divers systèmes matériels Sk , de masses respectives Mk ,
deux à deux sans élément commun, le centre de masse de la réunion des Sk est celui des Ck affectés
des masses M k :
Mk OC k avec M =
Mk
M OC =
k
k
Si un système matériel est une somme de systèmes matériels simples, cette propriété permet de « concentrer » préalablement la masse de ces parties en leurs propres centres de masse puis de déterminer le centre
de masse de l’ensemble.
Exemples
(1) Centre de masse de la molécule de gaz ammoniac NH 3 . Le centre de masse de cette molécule
est celui de l’atome d’azote N et du groupement des trois atomes d’hydrogène concentrés en leur centre
de masse K (Fig. 17.2). Il en résulte, puisque mN /mH = 14 :
CCN
CCK
CK CN
3
et CC N =
C KC N
m N CCN + 3m H CC K = 0 d’où
=−
=
3mH
3m H + mN
17
mN
N
H
C C1 C 2
H
K
H
F IG . 17.2.
D1
D2
F IG . 17.3.
(2) Centre de masse C d’un disque évidé. Le centre de masse C d’un disque évidé, de masse M ,
est tel que :
M 1OC1 = M OC + M2 OC 2
C 1 étant le centre de masse du disque D 1 non évidé, homogène, de masse M 1, et C 2 le centre de
masse du disque homogène D 2 , de masse M2, que l’on a enlevé (Fig. 17.3). En choisissant l’origine
arbitraire en C 1, on obtient, puisque M = M 1 − M2 :
M1 − M
0 = M C1 C + (M1 − M) C 1C2 d’où C 1C = −
C1 C 2
M
Si le rayon du disque enlevé est la moitié du rayon du disque total, M = 3M1 /4 et C1 C = −C1C 2/3.
b) Symétrie matérielle
Précisons d’abord qu’un système matériel possède un élément de symétrie matérielle (point, droite,
plan) si la masse volumique en tout point de ce système est égale à la masse volumique au point symétrique par rapport à cet élément de symétrie. Ainsi, sur les figures 17.4a, b et c, A et A étant deux
points symétriques par rapport à l’élément de symétrie, on a r(A) = r(A ).
En remplaçant deux points symétriques par leur centre de masse doté d’une masse double et en
composant tous les centres de masse élémentaires, on voit aisément que C se trouve soit au centre de
symétrie O, soit sur l’axe de symétrie D, soit dans le plan de symétrie P. Ainsi, le centre de masse
d’une tige homogène est son milieu, celui d’une plaque rectangulaire homogène est le point de concours
de ses médianes, etc.
Retenons que si un système possède un élément de symétrie matérielle, ce dernier contient le centre
de masse.
289
Éléments cinétiques des systèmes matériels
Axe
de symétrie
D
A
O
Centre
de symétrie
A
A
Plan
H de symétrie
A
P
H
A
A
a)
b)
c)
F IG . 17.4.
c) Détermination expérimentale du centre de masse à l’aide d’un champ de force uniforme
Considérons un système matériel S d dont chacun des éléments A i est soumis à la force m i a0 , a0
étant un champ d’accélération uniforme tel que le champ local de pesanteur ou un champ d’accélération
uniforme quelconque. Le torseur des forces qui s’exercent sur Sd est celui associé à un ensemble de
vecteurs liés parallèles. C’est donc aussi celui associé à un seul vecteur dont le support passe par le
barycentre des points Ai, affectés des masses m i , qui est le centre de masse C.
Ce résultat fournit une méthode expérimentale de détermination de C : le champ de pesanteur
terrestre étant localement uniforme, on suspend Sd par un fil en différents points ; l’intersection des
directions verticales des fils de suspension tracées sur le système Sd donne C.
d) Théorèmes de Pappus-Guldin
Ces théorèmes, au nombre de deux, sont attribués à Pappus d’Alexandrie en 340 et au mathématicien suisse P. Guldin en 1641 ; ils permettent de déterminer rapidement les centres de masse de courbes
et de surfaces matérielles simples.
(1) Premier théorème de Pappus-Guldin. Considérons un arc plan AB, de longueur l, situé dans
le premier quadrant d’un système d’axes Oxy. Notons rl sa masse linéique (Fig. 17.5a). D’après la
définition du centre de masse, on a :
r llx C =
AB
xr l d l
et r lly C =
AB
yrl d l
Si rl est uniforme, ces deux équations se simplifient selon :
c Dunod – Toute reproduction non autorisée est un délit
l xC =
x dl
AB
et l yC =
y dl
AB
L’interprétation de ces deux intégrales est immédiate : elles représentent, au facteur multiplicatif 2p
près, les aires Sy et S x des surfaces engendrées par la rotation de l’arc AB autour des axes Oy et Ox
respectivement. Ainsi :
Sy
Sx
et
xC =
yC =
2pl
2pl
y
A
d
y
R
B
O
C
O
x
a)
x
b)
F IG . 17.5.
290
17. Éléments cinétiques des systèmes matériels
Exemple : Soit à déterminer la position du centre de masse d’un quart de cercle de rayon R
(Fig. 17.5b). Comme l = pR/2 et S x = Sy = 2pR 2, xC = y C = 2R/p.
(2) Second théorème de Pappus-Guldin. Considérons une plaque plane D, d’aire S, située dans
le premier quadrant d’un système d’axes Oxy. Notons rs sa masse surfacique (Fig. 17.6a). D’après la
définition du centre de masse, on a :
rsx d x d y
r sSxC =
S
et r sSyC =
r sy d x d y
S
Si la plaque est homogène, on peut simplifier par rs :
x dxdy
Sx C =
S
et S y C =
Ces intégrales représentent, au facteur 2p près, les volumes
plaque autour des axes respectifs Oy et Ox ; on a donc :
y
xC =
et
y
yC =
et
2pS
y dx dy
S
engendrés par la rotation de la
x
2pS
y
y
D
S
y
O
x
R
x
a)
C
O
x
x
b)
F IG . 17.6.
Exemple : Soit à déterminer le centre de masse d’un quart de plaque circulaire de rayon générateur
R (Fig. 17.6b). Comme S = pR2 /4 et x = y = 2pR 3 /3, on trouve : xC = y C = 4R/(3p).
I . 3 . — Calculs de centres de masse
a) Cône plein homogène
En raison de la symétrie matérielle, le centre de masse d’un cône homogène (masse M, hauteur h,
demi-angle au sommet g) est situé sur l’axe de symétrie matérielle Oz (Fig. 17.7a). Il convient donc
de calculer les intégrales suivantes :
rd
M=
et Mz C =
zr d
Ces intégrales de volume, a priori triples, peuvent se ramener à des intégrales simples. Pour cela, cherchons l’ensemble des points tels que la quantité à intégrer, zr, soit une constante ; ces points sont situés
entre les plans de cotes z et z + d z. Par conséquent, l’élément de volume d
vaut :
d
=
r
drrdwdz =
w
drr
r
dwdz =
w
r2
2p d z = pr 2 d z
2
avec
r2 = z2 tan 2 g
Il en résulte :
h
MzC =
zr d
=
0
2
h
2
zrpr d z = rp tan g
0
z 3 d z = rp
h4 2
tan g
4
291
Éléments cinétiques des systèmes matériels
Comme :
h
M=
rd
=r
V
0
pr 2 d z = rp tan 2 g
h
0
z2 d z = rp
h3
tan2 g
3
on trouve
3h
4
z
z
O
R
h
zC =
C2
R
µ
dz
C1
°
z
O
O
a)
b)
c)
F IG . 17.7.
b) Centre de masse d’une demi-sphère (creuse)
Dans ce cas, l’intégrale de surface à calculer se réduit, grâce au même découpage que précédemment, à (Fig. 17.7b) :
S
zrs d S
avec
z = R cos u
et
R2 sin u d w d u = R2 sin u d u
dS =
w
Donc :
p/2
S
zrs d S =
0
d w = 2pR 2 sin u d u
w
3
r s2pR sin u cos u d u = rs 2pR
3
sin 2 u
2
R/2
= rs pR3
0
2
Or M = r s2pR , ce que l’on retrouve en calculant :
p/2
c Dunod – Toute reproduction non autorisée est un délit
S=
dS =
0
2pR 2 sin u d u = 2pR2 {− cos u} 0
p/2
= 2pR2
d’où
zC =
R
2
Remarque : Pour déterminer le centre de masse de l’ensemble formé du cône de masse M 1 surmonté
de la demi-sphère adaptée de masse M2 (Fig. 17.7c), il suffit de chercher le centre de
masse des centres de masses C1 et C 2 de chaque partie :
1
3h
R
zC =
M1
+ M2 h +
4
2
M1 + M2
II . — MOMENTS D’INERTIE
II . 1 . — Moment d’inertie par rapport à un axe
On appelle moment d’inertie d’un système S d, par rapport à un axe D, la quantité positive :
mi di2 =
ID =
i
mi Hi A2i
i
di = Hi A i étant la distance du point Ai de masse mi à l’axe D (Fig. 17.8a). Pour un système matériel
continu, le moment d’inertie a pour expression :
ID =
HA2r d
292
17. Éléments cinétiques des systèmes matériels
Il est clair, d’après la définition, que le moment d’inertie d’une réunion de deux systèmes est la somme
des moments d’inertie de chacune des parties. Comme I D a les dimensions du produit d’une masse par
le carré d’une distance, on l’écrit souvent sous la forme :
ID = MR2
M étant la masse du système et R la distance à l’axe d’un point fictif de masse M qui aurait, par
rapport à D, le même moment d’inertie que le système ; on appelle cette longueur le rayon de giration.
z
Δ
A i(mi )
di
O
Δ
S
H
eΔ i
y
dl
C
x
z
b) A
a)
F IG . 17.8.
Exemple : Calculons le moment d’inertie d’une tige homogène, de masse M et de longueur l, par
rapport à un axe D perpendiculaire passant par son centre C (Fig. 17.8b). Il vient d’après la définition,
en désignant par rl la masse linéique de la tige et par z la coordonnée suivant la tige :
ID =
l/2
2
z2 d z = rl × 2 ×
CA rl d l = r l
−l/2
l3
Ml2
=
24
12
√
puisque M = rl l. Le rayon de giration de la tige est donc : R = l 3/6.
II . 2 . — Opérateur d’inertie et matrice d’inertie
Exprimons, dans un système d’axes R = Oxyz, le moment d’inertie d’un système S d par rapport
à un axe D de vecteur unitaire eD passant par le point O (Fig. 17.8a) :
m iH i A2i =
I OD =
i
i
mi eD × OAi 2
En désignant les composantes de eD et OA i par (a, b, g) et (xi , yi , zi ) respectivement, il vient :
IOD =
i
m i [(bz i − gyi) 2 + (gxi − azi )2 + (ay i − bxi )2]
soit encore, en développant :
IOD = a 2 Ixx + b 2I yy + g2 Izz − 2abIxy − 2bgI yz − 2gaIxz
avec :
m i (y2i + z 2i )
IOx =
i
m i(x 2i + z2i )
I Oy =
m i (x2i + y2i )
IOz =
i
i
et
Ixy =
m i xi yi
i
Iyz =
m i yi zi
i
I xz =
m i xi zi
i
293
Éléments cinétiques des systèmes matériels
Les quantités IOx , IOy , I Oz sont appelées les moments d’inertie du système Sd par rapport aux axes
respectifs Ox, Oy, Oz, et Ixy , Iyz , Ixz les produits d’inertie. L’expression précédente de IOD suggère
d’introduire un opérateur [I ] O qui s’explicite dans la base de R suivant une matrice carrée :
R
IOx
−Ixy
−Ixz
−Ixy
I Oy
−Iyz
−Ixz
−Iyz
IOz
Comme eD = aex + bey + ge z, le vecteur [I ] O e D s’explicite selon :
R
IOx
−Ixy
−Ixz
−Ixy
I Oy
−Iyz
−Ixz
−Iyz
IOz
R
a
aIOx − bI xy − gIxz
b = −aI xy + bIOy − gI yz
g R −aIxz − bIyz + gIOz
le moment d’inertie I OD peut être considéré comme le produit scalaire du vecteur unitaire e D et du
vecteur [I ]O eD que l’on obtient par l’action de [I ] O appelé opérateur ou tenseur d’inertie, sur e D :
I OD = eD · [I] O eD
La matrice carrée symétrique suivant laquelle s’explicite l’opérateur [I ]O dans la base orthonormée de
R est la matrice d’inertie.
II . 3 . — Axes principaux d’inertie
La matrice d’inertie étant réelle et symétrique, il est possible de trouver, par changement de base,
un système d’axes orthonormés tels que les produits d’inertie soient nuls. Cette base est appelée la base
principale d’inertie, ses axes, les axes principaux d’inertie, la matrice, la matrice principale d’inertie et
les termes diagonaux I 1, I2 et I3 les moments principaux d’inertie. Dans cette base, [I ] O s’écrit :
R
I1
0
0
0 0
I2 0
0 I3
Notant e1, e2 et e 3 les vecteurs unitaires portés par les axes principaux, on en déduit que :
[I] O e1 = I 1e1
[I]O e2 = I 2 e2
[I ] O e 3 = I 3 e 3
c Dunod – Toute reproduction non autorisée est un délit
On dit que e1, e2 et e 3 sont les vecteurs propres de l’opérateur [I] O et que I1 , I2 et I3 sont les
valeurs propres correspondantes.
Remarque : Le choix systématique d’une base principale d’inertie permet de ramener le calcul des
six coefficients de la matrice à trois calculés une fois pour toutes. Cependant, il implique
l’utilisation d’une base qui est en mouvement par rapport au référentiel du laboratoire,
d’où le soin qu’il convient d’apporter dans la dérivation des grandeurs vectorielles par
rapport au temps.
II . 4 . — Détermination des axes principaux d’inertie
En l’absence de symétrie, la recherche des axes principaux d’inertie d’un système matériel est délicate. En revanche, si le système possède des symétries matérielles, la détermination des axes principaux
est aisée.
a) Symétries matérielles et axes principaux
(1) Plan de symétrie
294
17. Éléments cinétiques des systèmes matériels
Supposons que le système Sd possède un plan de symétrie matérielle, par exemple Oxy
(Fig. 17.9a). Le vecteur [I ]O e z s’explicite selon :
R
IOx −Ixy
−I xy IOy
−Ixz −Iyz
−Ixz
−Iyz
I Oz
R
0
−Ixz
0 = −Iyz
1 R I Oz
Or, Ixz =
i m i x i zi est nul puisque l’on peut grouper, du fait de la symétrie, deux à deux les éléments qui ont même xi et des valeurs opposées de zi . De même, Iyz =
i mi yi z i est nul. D’où :
[I]O ez = IOz ez .
Tout axe perpendiculaire à un plan de symétrie matérielle est axe principal d’inertie.
z
z Axe de symétrie
H
y
O
x
H
O
y
x
Plan de symétrie
a)
b)
F IG . 17.9.
(2) Axe de symétrie
Supposons que Sd possède un axe de symétrie matérielle, par exemple Oz (Fig. 17.9b). Ici aussi,
le vecteur [I ]O ez s’explicite selon :
−Ixz
−Iyz
R I Oz
avec Ixz = Iyz = 0. En effet, Ixz = i mi xiz i peut être calculé en groupant deux à deux les éléments
qui ont même zi et des valeurs de x i opposées. D’où : [I ]O ez = I Oz ez .
Tout axe de symétrie matérielle est axe principal d’inertie.
b) Conséquences
Nous allons résumer les résultats précédents sous la forme de deux théorèmes très utiles dans la
recherche des bases principales d’inertie.
(1) Premier théorème
Tout trièdre trirectangle, dont deux de ses plans sont plans de symétrie matérielle pour un système,
est trièdre principal d’inertie de ce système.
En effet, si les plans Oxz et Oyz sont plans de symétrie, les vecteurs e y et e x, respectivement
perpendiculaires à ces plans, définissent des axes principaux. D’autre part, Oz est axe de symétrie
puisque, d’après les symétries planaires, on peut écrire :
m i (xi , yi , zi ) = m i (xi , −y i , zi ) = mi (−x i , −yi , zi )
L’axe Oz est donc axe principal.
(2) Deuxième théorème
Tout trièdre trirectangle, dont deux de ses axes sont axes de symétrie matérielle pour un système,
est trièdre principal d’inertie de ce système.
295
Éléments cinétiques des systèmes matériels
En effet, si les axes Ox et Oy sont axes de symétrie, les vecteurs e x et e y définissent des axes
principaux. D’autre part, Oz est axe de symétrie puisque, d’après les symétries axiales, on peut écrire :
mi (x i , yi , zi ) = mi (xi , −yi , −z i ) = mi (−xi , −yi, z i )
L’axe Oz est donc axe principal.
c) Associativité
Si le système Sd est la réunion de plusieurs systèmes matériels Sk , le moment d’inertie par rapport
à tout axe D est la somme des moments d’inertie des Sk par rapport à ce même axe. Cette propriété
qui découle directement de la définition permet de décomposer le système S d en systèmes Sk simples,
dont les moments d’inertie sont connus.
II . 5 . — Opérateurs principaux d’inertie cylindrique et sphérique
L’opérateur principal d’inertie d’un système matériel est cylindrique si deux de ses moments d’inertie principaux, par exemple I1 et I 2, sont égaux. Il est sphérique si les trois moments d’inertie principaux sont égaux. Les matrices d’inertie s’écrivent donc respectivement :
I1 0
0 I1
0 0
0
0
I3
I1
0
0
et
0
I1
0
0
0
I1
= I1 [1]
II . 6 . — Théorème d’Huygens-Schteiner
La matrice d’inertie dépend de l’origine des axes du trièdre choisi. Étudions l’influence d’une
translation des axes en considérant le trièdre initial Oxyz et le nouveau trièdre O x yz (Fig. 17.10).
En désignant par a, b, c les coordonnées de O, il vient :
m i (x 2i + y 2i ) =
IOz =
i
et
m i [(xi + a)2 + (y i + b) 2] = I O z + M (a 2 + b2 ) + 2a
i
i
Ixy =
m i yi
i
mi (x i + a)(yi + b)
mi xiy i =
i
c Dunod – Toute reproduction non autorisée est un délit
m ix i + 2b
i
Si O coïncide avec le centre de masse C du système, les relations précédentes se simplifient, car les
mi x i ,
m i y i et
termes
m i zi s’annulent. Retenons, pour le moment d’inertie ICz et pour le
produit d’inertie ICxy associés au centre de masse :
IOz = ICz + Md 2
avec d 2 = a2 + b 2
et
IOxy = I Cxy + Mab
La première relation, dans laquelle d est la distance entre les deux axes parallèles passant par les points
O et C, est connue sous le nom de théorème de Huygens-Schteiner.
Ainsi, le moment d’inertie par rapport à un axe de direction donnée est minimal si cet axe passe par
le centre de masse.
z
z
c
d
O
x
x
O
C
a
F IG . 17.10.
y
b y
296
17. Éléments cinétiques des systèmes matériels
III . — MÉTHODES DE CALCUL DES MOMENTS D’INERTIE
III . 1 . — Système ayant la symétrie de révolution
C’est le cas du cône plein homogène étudié précédemment (Fig. 17.7a). Les plans Oxz et Oyz
sont plans de symétrie matérielle et Oz axe de révolution ; l’opérateur d’inertie [I ]O s’écrit, dans le
repère R = Oxyz qui est repère principal :
R
0 0
I1 0
0 I3
I1
0
0
Il est en général plus commode de calculer d’abord le moment d’inertie I3 par rapport à l’axe de
révolution ; ensuite, pour faciliter le calcul technique de I1 , il est souvent préférable d’introduire les
intermédiaires que sont les moments d’inertie par rapport aux plans Oxz, Oyz et Oxy. En effet :
m i y2i
I Oxz =
i
et
+
z 2i )
2
i mi (xi
et I 2 =
mi z2i
I Oxy =
i
2
i m i (yi
sont reliés à I1 =
m i x2i
I Oyz =
i
+
z 2i )
par :
I1 + I 2 = I Oxz + IOyz + 2I Oxy
D’autre part, IOxz + I Oyz = I3 et IOxz = I Oyz , du fait de la symétrie. Par conséquent :
I 1 = I2 = I Oxy +
I3
2
Exemple : Pour déterminer la matrice principale d’inertie d’un cône plein et homogène (Fig. 17.7a),
calculons les deux intégrales suivantes :
(x 2 + y2 )r d
I3 =
et IOxy =
z 2r d
Les points tels que (x2 + y2 ) ait une valeur déterminée sont situés à l’intérieur d’une couronne, d’épaisseur d z, de rayon intérieur r = (x2 + y2) 1/2 et de rayon extérieur r + d r . Par conséquent, I3
s’écrit :
h
r
h
r
dz
dz
I3 =
r2 r2pr d r = 2pr
r 3 d r
0
soit :
I3 =
0
h
pr
2
Quant à IOxy , il vaut :
Or le volume du cône est
0
=
pr 4
tan a
2
r4 d z =
0
h
I Oxy =
0
z2 rpr2 d z =
pR 2h/3,
d
=
h
0
0
pr 2 d z =
pz 2 tan2 a d z = p tan2 a
Finalement, il vient, en fonction de la masse M = r
3
Mh2 tan2 a
10
pr 5 4
h tan a
10
rpz4 tan2 a d z = rp
0
I3 =
z4 d z =
0
h5
tan 2 a
5
avec R = h tan a, ce que l’on peut retrouver selon :
h
=
h
IOxy =
3 2
Mh
5
z3
3
h
=
0
ph3 tan2 a
3
:
et
3
3
I 1 = I2 = Mh 2 + Mh2 tan2 a
5
20
297
Éléments cinétiques des systèmes matériels
III . 2 . — Système ayant un opérateur d’inertie à symétrie sphérique
Dans ce cas, il est commode, pour déterminer le moment d’inertie I par rapport à tout axe passant
par le centre de symétrie O, d’utiliser comme intermédiaire de calcul le moment d’inertie au centre O :
m i (x2i + y2i + z2i )
IO =
i
Comme I 1 + I2 + I 3 = 2IO et que I1 = I2 = I3 = I, il vient :
2
IO
3
I=
a) Opérateur d’inertie d’une sphère et d’une boule
i) Sphère homogène
Compte tenu des symétries, le trièdre Oxyz est principal d’inertie (Fig. 17.11). Évaluons I O :
IO =
S
r 2 rs d S
soit, puisque r est égal au rayon R de la sphère (creuse) :
IO = r s R2
S
d S = rsR2 S = MR2
d’où
2
2
I = I O = MR2
3
3
ii) Boule homogène
L’analyse est la même que précédemment, mais le calcul de I O est plus laborieux, puisque la masse
est répartie sur tout le volume :
IO =
soit, puisque d
= 4pr2 d r et M = r4pR3 /3 :
IO = 4pr
c Dunod – Toute reproduction non autorisée est un délit
r2r d
R
4
r d r = 4pr
0
r5
5
R
= 4pr
0
R5
3MR2
=
5
5
d’où
I=
2
2
I O = MR 2
3
5
b) Opérateur d’inertie d’une demi-sphère et d’une demi-boule
i) Demi-sphère
En raison des propriétés d’associativité et d’additivité, le moment d’inertie I (ds) de la demi-sphère
(creuse) est la moitié du moment d’inertie I (s) de la sphère (creuse). Par conséquent :
I (s)
M(s)R 2
= M (ds) R2
=
2
2
puisque les masses sont dans le rapport 1/2. On obtient donc la même expression que pour la sphère
entière :
2
I = MR 2
3
I(ds) =
ii) Demi-boule homogène
Un raisonnement analogue au précédent donne le même résultat que pour une boule homogène.
298
17. Éléments cinétiques des systèmes matériels
z
z
O
O
y
x
y
x
F IG . 17.11.
F IG . 17.12.
c) Opérateur d’inertie d’un cube plein homogène
La matrice principale d’inertie du cube possède la symétrie sphérique puisque les trois axes ont des
rôles identiques. Le calcul du moment d’inertie par rapport à l’un quelconque de ses axes principaux est
(Fig. 17.12) :
x2 d + r
y2 d
I Oz =
(x2 + y2)r d = r
Il vient en intégrant, a désignant le côté du cube :
2
x d
a/2
a/2
2
x dx
=
dy
−a/2
−a/2
x3
3
a/2
dz =
−a/2
a/2
y
−a/2
a/2
−a/2
z
a/2
−a/2
=
a5
12
Comme il en est de même pour la seconde intégrale, on trouve, sachant que M = ra 3 :
I Ox = IOy = I Oz =
Ma2
6
III . 3 . — Centre de masse et moments d’inertie de quelques solides
Nous avons rassemblé dans le tableau 17.1 les propriétés de masse de quelques solides homogènes
qui représentent un grand nombre de solides réels.
On remarquera qu’il est possible de déduire de ce tableau d’autres résultats intéressants. Ainsi, la
tige s’obtient en faisant R = 0 dans le cylindre plein, la plaque en faisant c = 0 dans le parallélépipède
rectangle, etc. D’autre part, les résultats relatifs aux demi-solides s’obtiennent aisément à partir des
solides entiers, comme cela a déjà été dit.
IV . — QUANTITÉ DE MOUVEMENT ET MOMENT CINÉTIQUE
IV . 1 . — Quantités de mouvement
Considérons le mouvement, par rapport à un référentiel R, d’un système quelconque S d , déformable ou non (Fig. 17.13). On peut associer à chaque élément de matière de masse d m, entourant un
point A de ce système, de vitesse v, la quantité de mouvement élémentaire : d P = v d m = vr d .
En sommant sur tout le volume , on obtient la quantité de mouvement du système :
P=
rv d
Un résultat important sur la quantité de mouvement a été établi dans le cas de systèmes de N corps ponctuels (cf. chapitre 13). Pour l’obtenir dans le cas des systèmes continus, on procède de la même façon :
P=
r
d OA
d
dt
=
d
dt
rOA d
=
d
(MOC)
dt
d’où
P = M vC
La quantité de mouvement d’un système matériel est celle de son centre de masse affecté de la masse totale.
299
Éléments cinétiques des systèmes matériels
Corps homogènes de masse M
Centre de masse
Moments et produits d’inertie
l
x
R
y O z
Centre
l
I1 = I 2 =
R
Centre
z
O
I3 =
y
Cylindre plein
z
MR 2 Ml 2
+
2
12
I3 = MR 2
Cylindre creux
x
I1 = I 2 =
MR 2 Ml 2
+
4
12
MR2
2
b
O
y
M(b 2 + c2)
12
M(a 2 + c2)
I2 =
12
I1 =
c
Centre
x
a
Parallélépipède rectangle
z
R
O
y
x
Centre
I1 = I2 = I 3 =
2MR 2
3
Centre
I1 = I2 = I 3 =
2MR 2
5
Sphère (creuse)
z
R
c Dunod – Toute reproduction non autorisée est un délit
O
y
x
Boule (pleine)
z
R
C
h
x
O
Cône creux
zC =
y
2h
3
I1 = I2 =
I3 =
MR2
2
MR 2
Mh2
+
4
2
300
17. Éléments cinétiques des systèmes matériels
R
O
x
C
y
zC =
z
R
2
I1 = I2 = I 3 =
2MR 2
3
Demi-sphère (creuse)
y
I Ox = I Oy =
R
C
xC = y C =
Oz
x
2R
p
IOz = MR 2
Ixy =
Quart de cercle matériel
y
b
4a
3p
4b
yC =
3p
xC =
C
a
Oz
x
Quart de plaque elliptique
y
R
Oz
α
C
xC =
x
2R sin a
3 a
MR 2
p
Mb2
Ma2
IOy =
4
4
M
I Oz = (a2 + b2 )
4
Mab
I xy =
2p
sin(2a)
MR2
1−
I1 =
4
2a
I Ox =
I2 =
sin(2a)
MR2
1+
4
2a
I 3 = I 1 + I2 =
Secteur circulaire
MR2
2
MR2
2
z
O
x
a
I 1 = I2 = M
5R2
a2
+
2
4
I 3 = M a2 +
3R2
2
Centre
R
Tore creux
z
R
C
h
x
O
zC =
3h
4
y
Cône plein
TAB . 17.1.
I 1 = I2 =
I3 =
3Mh2
3MR 2
+
5
20
3MR 2
10
301
Éléments cinétiques des systèmes matériels
IV . 2 . — Moment cinétique
On peut définir en un point fixe O de R, le moment cinétique du système S d en sommant les
moments cinétiques élémentaires :
LO =
OA × rv d
Si O est un autre point fixe de R, on a une relation simple entre les moments cinétiques en O et en
O (cf. chapitre 1) :
LO =
(OO + OA) × rv d
=
OO × rv d
+ LO = OO ×
rv d
+ LO
d’où :
L O = LO + OO × P
IV . 3 . — Torseur cinétique
La relation précédente entre les moments cinétiques étant antisymétrique, on peut associer au système de vecteurs liés élémentaires {rvA d }, le torseur [P] dit torseur cinétique ou des quantités
de mouvement. Son champ de moment est donné par le moment cinétique et son vecteur par la quantité de mouvement P du système (cf. chapitre 1).
Soulignons que le torseur cinétique, qui est construit à partir de vitesses relatives à un référentiel
R, est lui aussi relatif à R.
c Dunod – Toute reproduction non autorisée est un délit
IV . 4 . — Quantité de mouvement et moment cinétique dans le référentiel du centre de masse
Le référentiel du centre de masse R ∗ associé à R est le référentiel en translation par rapport à
R et tel que (cf. chapitre 13) :
P∗ = 0
Comme P ∗ = Mv∗C , v∗C = 0. Par conséquent, le centre de masse est fixe dans R ∗ . En outre, puisque
P∗ = 0, le moment cinétique L ∗ est indépendant du point où on le calcule :
L∗O = L∗O + OO × P∗ = L ∗O
On pourra donc écrire sans autre précision dans R∗ :
L∗ =
CA × rv∗ d
302
17. Éléments cinétiques des systèmes matériels
z
z
Ai
O
R∗
C
x
y
y
x
R
F IG . 17.13.
IV . 5 . — Rappel du théorème de Kœnig relatif au moment cinétique
Ce théorème relie L ∗ et LO relatif à R (cf. chapitre 13). Rappelons son expression :
L O = L∗ + OC × P
Il en résulte une propriété remarquable de C. En effet, si le point O est confondu avec C, on a :
LC = L∗
Donc, le moment cinétique par rapport à R∗ et le moment cinétique en C par rapport à R sont égaux.
IV . 6 . — Cas d’un solide
a) Solide ayant un point fixe O
Soit R = Oxyz le référentiel par rapport auquel on se propose d’exprimer la quantité de mouvement et le moment cinétique d’un solide S ayant un point fixe O (Fig. 17.14a). Dans R, on a, puisque
la vitesse d’un point A de S est v = V × OA, V étant le vecteur vitesse de rotation de S par rapport à R :
P = M vC = MV × OC et LO =
OA × rv d
=
OA × r(V × OA) d
La formule précédente permet de calculer directement le moment cinétique ; c’est laborieux mais
on évite ainsi l’introduction de l’opérateur d’inertie. Pour faire apparaître l’opérateur d’inertie, il suffit
d’expliciter l’expression du moment cinétique. Comme les vitesses des différents points de S satisfont
au champ des vitesses d’un solide, on obtient :
vA/R = V × OA d’où
LO =
VOA2 − OA(OA · V)
rd
z
Ω
z
z
C
O
x
R
y
a
y
Solide
y
O
S
x
x
a)
y
a
b)
F IG . 17.14.
x
303
Éléments cinétiques des systèmes matériels
Explicitons cette dernière relation dans la base associée à R, dans laquelle (x, y, z) et (V x , V y, Vz)
sont les composantes de OA et V respectivement. Il vient, pour la première composante :
LO · e x =
[V x (x2 + y2 + z 2) − x(xVx + yV y + zV z)]
rd
soit :
LO · ex =
rd
[Vx (y2 + z2) − xyV y − xzVz ] = IOx Vx − Ixy V y − Ixz V z
Comme le calcul les deux autres composantes donnent des résultats analogues, la relation entre le moment cinétique et le vecteur rotation d’un solide S, par rapport à un référentiel R, est la suivante :
L O/R = [I]O V
[I] O étant l’opérateur d’inertie représenté dans R par la matrice d’inertie :
R
IOx
−Iyx
−Izx
−Ixy
I Oy
−Izy
−Ixz
−Iyz
IOz
Notons que L O et V ne sont pas colinéaires, à moins que V soit porté par un axe principal :
LO = [I]O V = [I]O (V e1) = V([I] O e1 ) = V I 1 e1 = I 1 V
si l’axe défini par e1 est principal.
b) Exemple : Moment cinétique d’une plaque carrée
(1) Calcul direct
Calculons le moment cinétique d’une plaque carrée homogène tournant autour d’un axe fixe Oz
confondu avec l’un de ses côtés (Fig. 17.14b). Comme la vitesse d’un point A de la plaque, de coordonnées x , z, vaut Vx ey , si V = V ez est sa vitesse angulaire, il vient :
LO =
OA × (V × OA) rs d x d z =
(x ex + z ez ) × (Vxe y ) rs d x d z
rs étant la masse surfacique. On obtient :
a
c Dunod – Toute reproduction non autorisée est un délit
LO = rsV e z
0
a
0
a
x2 d x d z − rs V e x
a
0
x z d x d z
0
Effectuons les intégrales :
a
0
a
0
2
x dx dz =
x3
3
a
0
a
{z} 0
a4
=
3
a
et
0
a
0
x z dx dz =
x2
2
a
0
z2
2
a
=
0
a4
4
En introduisant la masse de la plaque M = rsa2 , on obtient :
LO = r sV
a4
a4
e z − ex
3
4
=
Ma2
Ma2
V ez −
V ex
3
4
(2) Calcul à l’aide de l’opérateur d’inertie
Calculons l’opérateur d’inertie [I] O à l’origine O. Dans R , [I ]O s’explicite par la matrice d’inertie suivante :
IOx
−Ixy −Ix z
−I y x
IOy
−Iy z
−Izy
IOz
R −Izx
304
17. Éléments cinétiques des systèmes matériels
dans laquelle les produits d’inertie Iyz et Ix y sont nuls puisque l’axe Oy est perpendiculaire à un
plan de symétrie matérielle. Comme V n’a qu’une composante selon ez, le moment cinétique L O/R
a pour composantes dans la base de R :
R
IOx
0
−Izx
0
I Oy
0
−I x z
0
I Oz
R
−Ix z v
0
0 =
0
V
I Oz v
R
Il est donc nécessaire de calculer I Oz et I x z :
a
IOz =
0
a
0
x2 rs d x d z =
Ma2
3
et Ix z =
a
0
a
0
xz rs d x d z =
Ma2
4
On retrouve bien le résultat obtenu directement.
c) Cas général
L’intérêt de la relation entre L O et V dépasse le cas particulier envisagé où S a un point fixe.
En effet, notant C le centre de masse du solide en mouvement quelconque par rapport à R, on peut
écrire, à l’aide du théorème de Kœnig :
LO/R = [I]C V + OC × P
Bien que la théorie ne l’exige pas, il est commode, pour calculer l’opérateur d’inertie, d’utiliser une base
liée au solide ; dans cette base, les coefficients de [I ] O sont des constantes déterminées une fois pour
toutes.
On simplifiera encore l’étude en utilisant une base principale d’inertie que l’on aura trouvée à l’aide
des éléments de symétrie matérielle du solide.
Une fois la base principale adoptée, ce choix doit bien entendu être conservé pour V S/R ; dès
lors, le moment cinétique du solide relatif à R sera exprimé dans une base différente de celle de R.
On n’oubliera pas alors d’utiliser la relation de Bour (cf. chapitre 3).
CONCLUSION
Retenons principalement les points essentiels :
(1) Le centre de masse C d’un système quelconque continu est défini par :
1
OC =
OA r d
M
(2) Le moment d’inertie I Oz d’un système par rapport à un axe Oz a pour expression :
m i Hi A2i
IOz =
ou
IOz =
r HA 2 d
i
dans le cas d’une distribution continue, le point H étant la projection de A suivant l’axe Oz.
En fonction de l’opérateur d’inertie [I ] O, IOz a pour expression :
IOz = ez · [I]O e z
(3) Les éléments de symétrie jouent un rôle essentiel dans la simplification des calculs et la détermination rapide du centre de masse et des axes principaux d’inertie.
305
Éléments cinétiques des systèmes matériels
(4) Le théorème d’Huygens-Schteiner :
I OD = I CD + Md 2
d étant la distance qui sépare l’axe OD de l’axe parallèle CD passant par le centre de masse, montre
que le moment d’inertie par rapport à un axe de direction déterminée est minimal lorsque cet axe passe
par le centre de masse.
(5) La quantité de mouvement P et le moment cinétique L O d’un système matériel quelconque
ont
pour expressions respectives :
Sd
P = M vC =
et L O =
rv d
r OA × v d
Comme cette dernière expression est difficile à calculer, il est commode d’utiliser le théorème de Kœnig :
LO = L ∗ + OC × P
avec
L∗ =
r CA × v∗ d
EXERCICES ET PROBLÈMES
P17– 1. Moments d’inertie principaux d’un cerceau homogène
1. Trouver, en fonction de sa masse M et de son rayon R, les moments principaux d’inertie d’un
cerceau homogène.
2. En déduire le moment d’inertie par rapport à un axe D tangent au cerceau et contenu dans son
plan.
P17– 2. Moment d’inertie d’une tige homogène
c Dunod – Toute reproduction non autorisée est un délit
1. Déterminer le moment d’inertie d’une tige homogène (masse m, longueur l), par rapport à un
axe D, passant par l’une de ses extrémités et incliné d’un angle u par rapport à la tige.
2. Quelle est la matrice d’inertie de la tige dans une base principale, en l’une de ses extrémités E ?
Retrouver le résultat précédent.
P17– 3. Centre d’inertie et moments d’inertie principaux d’un demi-cercle homogène
1. Trouver la position du centre d’inertie d’un demi-cercle homogène, de rayon R (Fig. 17.15).
2. Trouver le moment d’inertie par rapport à un axe perpendiculaire au plan du demi-cercle passant
par le sommet S.
3. Quelle est la matrice d’inertie dans une base principale au centre géométrique O du cercle
générateur ?
y
y
y
S
Oz
F IG . 17.15.
x
Oz
F IG . 17.16.
x
Oz
F IG . 17.17.
x
306
17. Éléments cinétiques des systèmes matériels
P17– 4. Moments d’inertie principaux d’un quart de disque homogène
1. Déterminer la position du centre de masse d’un quart de disque homogène (Fig. 17.16).
2. Quel est le moment d’inertie par rapport à l’axe de symétrie passant par le sommet O ?
3. Quelle est la matrice d’inertie d’un quart de disque matériel homogène, dans une base principale
au centre géométrique O du disque générateur de rayon R ? Calculer le produit d’inertie Ixy .
P17– 5. Centre d’inertie et moments d’inertie principaux d’un demi-disque homogène
1. Trouver la position du centre d’inertie d’un demi-disque matériel homogène, de rayon R et de
masse M (Fig. 17.17).
2. Quelle est la matrice d’inertie dans une base principale au centre géométrique O du disque
générateur ?
3. Quel est le moment d’inertie de ce solide par rapport à un diamètre du plan du demi-disque qui
fait l’angle u avec l’axe Oy ?
P17– 6. Centre d’inertie et moments d’inertie d’une plaque carrée homogène
1. Déterminer la matrice d’inertie d’une plaque carrée homogène, dans la base de Oxyz (Fig. 17.18).
2. En déduire le moment d’inertie par rapport à un axe D, passant par l’un de ses sommets S,
contenu dans le plan Oxy et faisant l’angle u avec l’axe Ox.
y
a
z
Δ
S
θ
O
O
x
y
x
F IG . 17.18.
F IG . 17.19.
P17– 7. Centre d’inertie et moments d’inertie d’une demi-boule homogène
1. Trouver la position du centre d’inertie d’une demi-boule homogène (pleine), de rayon R
(Fig. 17.19).
2. Quel est son moment d’inertie par rapport à tout diamètre de son plan ?
P17– 8. Moments d’inertie principaux d’un double panneau solaire
1. Trouver les moments d’inertie principaux d’un double panneau solaire, de masse M, en son
centre O. Les caractéristiques géométriques de ce solide sont données sur la figure 17.20.
2. Le panneau tourne autour d’un axe vertical Oz 0 à la vitesse angulaire V. Son axe Oy fait un
angle u avec le plan horizontal Ox0y0 du référentiel terrestre R0 = Ox 0 y0z0 . Donner l’expression du
moment cinétique en O, par rapport à R0, dans la base de Oxyz.
307
Éléments cinétiques des systèmes matériels
z
Oz
b
a
l
y
2R
O
y
x
c
F IG . 17.20.
F IG . 17.21.
P17– 9. Moments d’inertie principaux d’une antenne semi-cylindrique concave
1. Quels sont les moments d’inertie principaux, au centre O de l’antenne d’un radar, de masse M,
que l’on peut assimiler au demi-cylindre concave de la figure 17.21 ?
2. L’antenne tourne autour de son axe vertical Oz avec la vitesse angulaire V. Donner l’expression
du moment cinétique en O, par rapport à un référentiel terrestre R0 = Ox0y0 z0, dans la base de Oxyz.
P17– 10. Centre d’inertie et moments d’inertie principaux d’un cône creux
1. Calculer la surface d’un cône creux en fonction de la hauteur h et du demi-angle au sommet g
(Fig. 17.22).
2. Déterminer la position du centre de masse.
3. Trouver les moments d’inertie principaux du cône en son sommet.
z
R
γ
z
R
h
θ
O
a
O
F IG . 17.22.
F IG . 17.23.
c Dunod – Toute reproduction non autorisée est un délit
P17– 11. Moments d’inertie principaux d’un tore homogène
1. Quels sont les moments d’inertie principaux d’un tore creux homogène, de rayon moyen a, de
rayon de section droite R, en son centre de masse (Fig. 17.23) ?
2. Même question si le tore est plein.
P17– 12. Moment d’inertie d’un anémomètre à coupelles
Un anémomètre à coupelles est un appareil que l’on utilise pour mesurer la vitesse du vent. Il est
constitué de quatre coupelles ayant la forme de demi-sphères creuses placées comme le montre la figure 17.24. Calculer, en fonction de la masse m de chaque coupelle, de leur rayon R et de la distance
b de leurs centres à l’axe de rotation Oz de l’ensemble, le moment d’inertie de l’anémomètre par rapport à Oz.
308
17. Éléments cinétiques des systèmes matériels
y
2R
b
2b
−b
O
x
Oz b
−b
F IG . 17.24.
F IG . 17.25.
P17– 13. Moment d’inertie d’un pendule de torsion
Un pendule de torsion est constitué par quatre boules pleines identiques placées aux extrémités de
quatre tiges identiques se coupant à angle droit en leur milieu (Fig. 17.25). L’ensemble tourne autour
de l’axe perpendiculaire au plan des tiges passant par le centre de masse. Trouver, en fonction de la
longueur b de chaque tige, de leur masse m, du rayon R de chaque boule et de leur masse M, le
moment d’inertie du pendule par rapport à l’axe de rotation.
P17– 14. Moments d’inertie de la molécule d’ammoniac
La molécule d’ammoniac NH 3 possède un axe de symétrie d’ordre 3, l’axe Oz défini par l’atome
d’azote et le centre du triangle équilatéral formé par les trois atomes d’hydrogène (Fig. 17.26). Dans la
base centrale principale, l’opérateur d’inertie s’explicite selon une matrice diagonale dont les éléments
s’écrivent en raison de la symétrie :
I1 = I et I2 = I3 = I⊥
1. Établir l’expression de I 1 , en fonction des masses m N et m H , de la distance
a = N − H ≈ 101, 4 pm et de l’angle HNH = h ≈ 107 ◦ . Calculer la valeur correspondante.
2. Même question pour I ⊥ .
101,4 pm
N
x
C
H
y
107°
H
O
H
F IG . 17.26.
P17– 15. Surface et fil en forme de triangle
1. Une distribution surfacique de masse, homogène est limitée par un triangle quelconque ABC ,
de côtés a , b et c . À l’aide de considérations géométriques simples, montrer que son centre de masse
Gs coïncide avec le point de concours des médianes (Fig. 17.27a).
2. Une distribution linéique de masse, homogène, présente la forme d’un triangle quelconque
ABC , de côtés a , b et c (Fig. 17.27b). Elle est constituée d’un fil de cuivre de masse volumique
r = 8 900 kg.m−3 et de section s = 25 mm 2 .
a) Montrer que son centre de masse G l est le même que celui de trois masses ponctuelles dont on
donnera les positions A B C , et les valeurs en fonction de la masse linéique rl , a , b et c .
b) Quelle est l’équation vectorielle qui détermine G l ?
c) Par multiplication vectorielle, trouver trois équations linéaires reliant les distances de G l aux
trois côtés du triangle A B C .
309
Éléments cinétiques des systèmes matériels
d) En déduire que Gl coïncide avec le centre d’un cercle particulier du triangle A B C . Trouver
ce cercle et exprimer son rayon r en fonction de la surface S et du périmètre p de ce triangle.
e) Retrouver la relation suivante entre la surface S , a , b , c et p , établie par Héron d’Alexandrie ( Ier siècle avant J.C.) :
2
S =
p
2
p
− a
2
p
− b
2
1/2
p
− c
2
Calculer la masse du fil triangulaire ainsi que S et r , dans les trois cas suivants, l’unité de longueur
étant le centimètre :
a = 10, 5
b = 16, 5
c = 21
a = 12
b = 16
c = 20
a = b = c = 16
3. Pour a = 10, 5 cm , b = 16, 5 cm et c = 21 cm , calculer le moment d’inertie principal du fil
triangulaire par rapport à l’axe Gl z normal à son plan et passant par Gl .
A
A
b
c
B
b
c
C
a
B
C
a
a)
b)
F IG . 17.27.
P17– 16. Quantité de mouvement et moment cinétique d’un ensemble tige et disque
c Dunod – Toute reproduction non autorisée est un délit
On considère un disque plein homogène, de masse m, de rayon R, de centre C et mobile comme
l’indique la figure 17.28a : OA est une tige homogène, de longueur l, de masse m, tournant dans le
plan de la figure autour de l’axe Oz, à la vitesse angulaire u̇.
1. Le vecteur AC est assujetti à conserver une direction fixe, le disque étant constamment dans
le plan Oxy, perpendiculaire à Oz. Exprimer en fonction de l’angle u = (Ox, OA), la quantité de
mouvement et le moment cinétique du système en O.
2. Même question si le disque est solidaire de la tige, comme l’indique la figure 17.28b.
y
y
A
C
C
O
θ
A
O
x
a)
θ
x
b)
F IG . 17.28.
310
17. Éléments cinétiques des systèmes matériels
P17– 17. Quantité de mouvement et moment cinétique de deux tiges homogènes articulées
Deux tiges homogènes, de masse m1 et m2 et de longueurs l 1 et l2 , sont articulées en un point
A1 (Fig. 17.29). L’ensemble peut osciller dans un plan vertical, autour d’un axe horizontal Oz passant
par l’extrémité d’une des tiges. Exprimer, dans la base de R = Oxyz, la quantité de mouvement et le
moment cinétique du système en fonction des paramètres angulaires u1 et u 2.
z
z
y
O
l1
θ1
x
D
θ
y
O
A1
l2
θ2
F IG . 17.29.
x
V
y
ψ
x
C
A
µ0
O
u
F IG . 17.30.
F IG . 17.31.
P17– 18. Quantité de mouvement et moment cinétique d’une plaque triangulaire
Une plaque triangulaire homogène (masse M), ayant la forme d’un triangle équilatéral de côté
a, est mobile autour de l’origine O d’un référentiel R = Oxyz (Fig. 17.30). L’un de ses côtés OA
balaie le plan Oxy. On considère le référentiel R = Oxy z lié à la plaque tel que Ox coïncide
avec la médiane OC et que Oz soit normal à la plaque. Exprimer, dans la base de R , la quantité de
mouvement et le moment cinétique en O de la plaque, par rapport à R.
P17– 19. Moment cinétique d’une barre tournant autour d’un axe
Une barre homogène (masse m, longueur l, section négligeable) tourne à la vitesse angulaire V
constante autour d’un axe D vertical, fixe par rapport à un référentiel R qui passe par son centre O
(Fig. 17.31). La barre et l’axe forment à tout instant un angle constant u 0 dans un plan vertical.
1. Calculer directement, en fonction de u 0 et de V, le moment cinétique de L O dans la base liée
à la barre.
2. Les deux vecteurs L et V sont-ils colinéaires pour u 0 quelconque ? Pour quelles valeurs de
u 0 le sont-ils ?
18
Dynamique des systèmes matériels
La dynamique des systèmes matériels s’appuie sur le principe fondamental de la dynamique qui est
une généralisation de la loi fondamentale de la mécanique du corps ponctuel (cf. chapitre 4) et des théorèmes relatifs aux mouvements des systèmes de N corps (cf. chapitre 13) aux systèmes déformables
quelconques. Il exprime donc la relation, d’une part, entre les éléments cinétiques, la quantité de mouvement et le moment cinétique, et, d’autre part, les forces et les moments qui s’exercent sur eux.
I . — FORCES APPLIQUÉES À UN SYSTÈME
c Dunod – Toute reproduction non autorisée est un délit
Considérons un système déformable quelconque S d, schématisé par une distribution continue de
masse, en mouvement par rapport à un référentiel R. Introduisons le vecteur lié générique (A, f v)
représentant la force volumique qui s’exerce sur le point courant A. Un élément de matière, de volume
d , autour d’un point A, est soumis à la force f v d
exercée par l’ensemble des autres éléments de
Sd et par des corps extérieurs à S d (Fig. 18.1).
Si le référentiel par rapport auquel on étudie le mouvement du système n’est pas galiléen, f v d
contient aussi les forces d’inertie d’entraînement et de Coriolis (cf. chapitre 7).
Le système des forces appliquées à S d est donc représenté par l’ensemble des vecteurs liés
{(A, fv d )}.
z
f vd
A
O
x
R
y
Sd
F IG . 18.1.
I . 1 . — Somme des forces et moment des forces
Au système de force représenté par l’ensemble des vecteurs liés {(A, f v d
somme S et le moment des forces :
S=
fv d
et MO =
OA × f v d
)}, on associe la
312
18. Dynamique des systèmes matériels
Il est facile d’établir la relation entre les moments en deux points distincts O et O . En effet :
MO =
d’où :
(OO + OA) × f v d
= OO ×
fv d
+
O A × f v d
M O = MO + OO × S
On voit que, si S = 0, le moment M est indépendant du point où on le calcule ; le système de
forces est alors équivalent à un couple.
I . 2 . — Torseur-force
En raison de la relation entre les moments des forces en deux points distincts, on introduit le
torseur-force [F ] dont les éléments de réduction en O sont la somme S et le moment MO.
Rappelons que deux systèmes de forces sont torsoriellement équivalents si leurs torseurs associés
sont égaux (cf. chapitre 1). Ainsi, le torseur associé aux forces de pesanteur, si le champ de pesanteur
est supposé uniforme, est égal à celui associé à une force unique, dont le support passe par le centre de
masse confondu ici avec le centre de gravité. De même, le torseur associé à des forces concourantes est
égal à celui associé à une force unique dont le support passe par le point de concours.
L’exemple représenté sur la figure 18.2 montre que l’équivalence torsorielle a une signification physique précise et limitée. En effet, dans les deux cas, ressort étiré et ressort comprimé, le torseur associé
au système des deux forces opposées {F, −F} est nul. L’état physique du ressort est évidemment différent. Comme nous le verrons, ce n’est que relativement au seul principe fondamental de la dynamique
que cette équivalence torsorielle de deux systèmes de vecteurs liés a un sens : seuls les mouvements du
centre de masse et autour du centre de masse sont les mêmes.
A1
F
A2
a)
A1
−F
−F
A2
b)
F
F IG . 18.2.
I . 3 . — Classification des forces
a) Forces extérieures et forces intérieures à un système Sd
Comme nous l’avons déjà dit au chapitre 13, la force f v qui agit sur le point matériel A peut être
considérée comme la somme de deux contributions :
due à tout corps étranger au système déformable Sd ; c’est une force extéi) l’une f v,ex d
rieure à Sd ;
ii) l’autre f v,in d
due à tout autre élément de matière appartenant au système Sd ; cette seconde
contribution est une force intérieure à Sd .
Aux systèmes de forces {f ex d } et {fin d }, on associe respectivement (S ex , MO,ex ) et
(Sin , MO,in ).
Ces quantités peuvent être considérées comme les éléments de réduction en O de deux torseurs,
celui [Fex ] des forces extérieures et celui [F in] des forces intérieures.
b) Forces données et forces inconnues
Une seconde classification, indépendante de la précédente, distingue les forces dont on connaît l’expression, c’est le cas des forces fondamentales connues, des forces inconnues qui participent au mouvement du système et que l’on détermine seulement une fois le mouvement connu. Ces forces inconnues,
qui sont le plus souvent des forces de contact, augmentent le nombre d’inconnues du problème.
313
Dynamique des systèmes matériels
II . — PRINCIPE FONDAMENTAL DE LA DYNAMIQUE
Considérons le mouvement, par rapport à un référentiel galiléen R, d’un système matériel quelconque Sd , fermé, c’est-à-dire un système qui n’échange pas de matière avec le milieu extérieur
(Fig. 18.3). Soit [PO] le torseur cinétique de S d par rapport à R au point O fixe de R et [F O,ex]
le torseur des forces extérieures en ce même point.
II . 1 . — Énoncé du principe fondamental
Par rapport à tout référentiel galiléen R et en un point fixe O de R, le mouvement d’un système
matériel Sd fermé satisfait à l’équation torsorielle suivante :
d[PO ]
= [FO,ex ]
dt
dans laquelle [FO,ex ] représente le torseur des forces exercées par les corps environnants.
Remarque : Précisons bien, le torseur cinétique [PO] est relatif au référentiel galiléen R et sa dérivée
est relative à la base de R.
z
O
x
Sd,2
Sd,1
y
Sd
R
F IG . 18.3.
II . 2 . — Opposition des actions réciproques
c Dunod – Toute reproduction non autorisée est un délit
Dans l’exposé de Newton de la dynamique, la troisième loi, appelée aussi principe des actions
réciproques entre deux corps ponctuels ou principe de l’action et de la réaction, permet d’étendre la
dynamique du corpuscule à celle des systèmes matériels quelconques (cf. chapitre 4 et 13).
Dans la formulation torsorielle présente, l’axiomatique contenue dans le principe fondamental initial est plus forte ; aussi l’opposition entre les actions réciproques apparaît-elle comme un théorème.
a) Théorème des actions réciproques
Si un système matériel S d,1 exerce sur un autre système S d,2 le torseur force [F 1→2 ], Sd,2 exerce
sur Sd,1 le torseur force opposé [F2→1 ] tel que :
[F1→2 ] + [F 2→1 ] = [0]
Pour établir le théorème de l’opposition des actions réciproques, subdivisons un système S d en deux
sous-systèmes S d,1 et S d,2 et écrivons pour S d, S d,1 et S d,2, le principe fondamental de la dynamique
(Fig. 18.3). Il vient, au point O, respectivement :
d[P]
d[P1]
d[P 2 ]
= [Fex ]
= [Fex ] 1 et
= [F ex]2
dt
dt
dt
Si l’on distingue dans [Fex ]1 et [F ex]2 les forces d’interaction entre Sd,1 et S d,2 , on obtient :
[Fex ]1 = [Fex→1 ] + [F 2→1]
et [Fex ]2 = [Fex→2 ] + [F 1→2 ],
avec
[Fex ] = [F ex→1] + [Fex→2 ]
314
18. Dynamique des systèmes matériels
D’autre part, en raison du caractère additif de [P] , on a :
d[P]
= [Fex ] + [F1→2 ] + [F2→1 ]
dt
Il en résulte, par comparaison avec l’équation torsorielle relative à S d, que [F 1→2 ] + [F2→1] = [0],
d’où :
F 1→2 + F 2→1 = 0 et M O,1→2 + MO,2→1 = 0
[P] = [P]1 + [P]2
d’où
Évidemment, si les systèmes S d,1 et Sd,2 se réduisent à des points matériels, on retrouve la troisième loi de Newton :
F 1→2 + F2→1 = 0
Remarque : Entre deux particules chargées en mouvement, les forces magnétiques semblent ne pas
satisfaire à l’opposition des actions réciproques. En réalité, cette opposition est rétablie si
l’on considère les forces de Lorentz et non pas les seules contributions magnétiques à ces
forces. Ce rétablissement prouve que les champs électrique et magnétique créés par les
charges en mouvement sont fondamentalement imbriqués (cf. Relativité et invariance).
b) Exemples
Les exemples relatifs à l’opposition des actions réciproques entre deux corps ont déjà été considérés et sont nombreux. Rappelons qu’entre le Soleil et la Terre, assimilées à leurs centres, les forces
de gravitation sont opposées. De même, entre deux particules chargées électriquement, les forces électrostatiques sont opposées (Fig. 18.4). Enfin, concernant les forces de contact, si un guide matériel G m
exerce sur un corps ponctuel A une force de réaction R, A exerce sur Gm la force −R.
A1
F2→1
O
O
A2
F1→2
Rotor
−G
Petit rotor
F IG . 18.4.
F IG . 18.5.
L’étude des actions de contact entre solides fournira de nombreux exemples d’opposition des moments de forces (cf. chapitres 19 et 25). Un exemple spectaculaire est fourni par le couple G qu’exerce
le moteur lié à la carlingue d’un hélicoptère sur la grande hélice. En raison de l’opposition des actions réciproques, la grande hélice exerce un couple opposé −G, lequel tend à faire tourner la carlingue dans
le sens opposé. On maintient l’hélicoptère sur sa ligne de vol à l’aide d’une petite hélice placée à l’arrière (Fig. 18.5).
III . — THÉORÈMES GÉNÉRAUX DE LA DYNAMIQUE
III . 1 . — Théorèmes de la quantité de mouvement et du moment cinétique
Si on explicite vectoriellement le principe fondamental de la dynamique des systèmes matériels,
on obtient les théorèmes de la quantité de mouvement et du moment cinétique :
dP
dt
= S ex
R
et
d LO
dt
= M O,ex
R
315
Dynamique des systèmes matériels
Comme P = MvC , le théorème de la quantité de mouvement est aussi appelé théorème du centre de
masse :
Le mouvement du centre de masse d’un système matériel est celui d’un corps ponctuel de masse
égale à la masse du système et soumis à la somme des forces Sex .
Remarques : (1) Les auteurs anglo-saxons appellent P et L respectivement moment linéaire et moment
angulaire. Les conservations des grandeurs vectorielles P et L sont alors des conservations de moments. On trouve la justification de ces appellations en mécanique analytique
où ces quantités sont les moments conjugués associés aux variables de position (cf. chapitre 24).
(2) Si le référentiel n’est pas galiléen, il faut ajouter les forces d’inertie d’entraînement et
de Coriolis aux forces créées par la présence des autres corps (cf. chapitre 7).
Si le point où l’on exprime le torseur cinétique et le torseur des forces extérieures n’est pas fixe
dans le référentiel galiléen considéré, la forme du théorème du moment cinétique diffère par l’addition
d’un terme complémentaire. En effet, si l’on introduit ce point mobile O , il vient :
d LO
= M O,ex soit
dt
d
(LO + OO × P) = M O ,ex + OO × Sex
dt
en introduisant O . On en déduit :
d L O
dP
+ vO × P + OO ×
= MO ,ex + OO × Sex
dt
dt
ce qui donne, en simplifiant :
d LO
+ vO × P = MO ,ex
dt
c Dunod – Toute reproduction non autorisée est un délit
Dans le cas particulier important où le point mobile est le centre de masse C, vC ×P = 0. Le théorème
du moment cinétique prend alors la forme simple suivante :
d LC
= MC,ex
dt
Remarques : (1) Il n’est pas inutile de souligner que l’application des théorèmes généraux (quantité de
mouvement et moment cinétique), en un point, fournit les mêmes informations que celle
en tout autre point. Le choix du point est donc strictement d’ordre technique : par exemple,
on appliquera souvent le théorème du moment cinétique au point où s’exerce une réaction
afin d’éliminer les inconnues supplémentaires.
(2) Une application délicate du théorème du moment cinétique en un point mobile
concerne le mouvement d’un solide S1 en contact avec un autre solide S 2 . Le point en lequel il convient dans ce cas d’écrire le théorème, afin d’éliminer la réaction de contact,
est le point géométrique de contact I dont la vitesse est généralement non nulle. Les
points I1 et I 2, qui ne coïncident avec I qu’exceptionnellement, n’ont pas cette propriété (cf. Exercices).
316
18. Dynamique des systèmes matériels
III . 2 . — Écriture en termes de bilan
Les théorèmes de la quantité de mouvement et du moment cinétique peuvent s’écrire sous forme
de bilans de grandeurs entre deux dates infiniment proches t et t + d t (cf. chapitre 13).
Dans le cas de la quantité de mouvement, on a :
d P = Sex d t
Or, a priori :
d P = dP(r) + dP (c)
or dP(r) représente le terme reçu par l’échange avec le milieu extérieur et dP (c) le terme de création.
On en déduit :
dP(r) = Sex d t
et dP (c) = 0
Comme le terme de création est toujours nul, la quantité de mouvement d’un système quelconque Sd
est une grandeur conservative.
De même, le théorème du moment cinétique peut s’écrire :
d LO = MO,ex d t
Comme, a priori :
d LO = dL(Or) + dL (Oc)
(r)
(c)
dLO étant le terme reçu et dLO
le terme créé, on en conclut :
dL(Or) = M O,ex d t
et dL (Oc) = 0
Le moment cinétique d’un système quelconque Sd est aussi une grandeur conservative.
III . 3 . — Théorèmes généraux de la somme dynamique et du moment dynamique
a) Somme dynamique
On appelle somme dynamique d’un système matériel la quantité suivante analogue à la somme
cinétique, mais construite à partir de l’accélération. Pour un système continu, on a :
D=
ra d
d’où
D=
Ainsi :
D=
d
dt
rv d
=
d
d
P=
(MvC )
dt
dt
dP
= Ma C
dt
b) Moment dynamique
Le moment dynamique d’un système matériel quelconque est la quantité suivante analogue au
moment cinétique, mais construite à partir des accélérations :
NO =
OA × ra d
317
Dynamique des systèmes matériels
soit, si O est un point fixe de R :
NO =
d
dt
OA × rv d
−
v × rv d
Comme la seconde intégrale est nulle, la relation entre moment dynamique et moment cinétique est très
simple dans ce cas :
d LO
NO =
dt
En un point O , mobile par rapport à R , on aurait :
N O =
d
dt
O A × rv d
−
(v − v O ) × rv d
soit
N O =
d
LO +
dt
vO × rv d
Ainsi, en un point mobile, la relation entre moment dynamique et moment cinétique fait apparaître un
terme supplémentaire :
d L O
NO =
+ vO × P
dt
c) Théorèmes généraux
D’après ce qui précède, les théorèmes généraux de la dynamique peuvent s’écrire aussi, à l’aide de
la somme et du moment dynamique :
D = M aC = Sex
et N O = M O,ex
Cette dernière relation, contrairement à celle exprimée à l’aide du théorème du moment cinétique, est
indépendante de la mobilité éventuelle du point O. En effet, en introduisant un point mobile O , il
vient :
N O + OO × D = MO ,ex + OO × Sex soit N O = M O,ex
puisque D = Sex. Ainsi :
c Dunod – Toute reproduction non autorisée est un délit
En un point quelconque, mobile ou non, le moment dynamique d’un système matériel est égal au
moment des forces extérieures.
C’est sans doute pour cette raison, fixité ou non du point considéré, que certains auteurs utilisent
cette dernière formulation des théorèmes généraux. Pour un physicien, cette écriture présente l’inconvénient majeur de sous-estimer l’importance considérable des éléments cinétiques, à la lumière des lois de
conservation, telles qu’elles se manifestent dans les problèmes de collisions, en mécanique des fluides,
en relativité (cf. Relativité et invariance) et en quantique (cf. Quantique). Rappelons que Newton, dès
l’énoncé de sa deuxième loi, avait déjà compris toute l’importance du concept de quantité de mouvement en privilégiant ce dernier à celui, même pas technique, de quantité d’accélération.
d) Autre énoncé du principe fondamental
On peut pousser encore plus loin l’usage du formalisme torsoriel en considérant le torseur dynamique [D] dont les éléments de réduction sont respectivement D et NO . Le principe fondamental
de la dynamique s’énonce alors par l’égalité du torseur dynamique [D] et du torseur des forces extérieures [F ]ex :
[D] = [F ex ]
égalité valable en n’importe quel point, fixe ou non par rapport au référentiel galiléen considéré.
318
18. Dynamique des systèmes matériels
III . 4 . — Cas d’un seul solide
L’étude du mouvement d’un seul solide S relève évidemment des théorèmes généraux précédents.
Cependant, dans ce cas particulier, le moment cinétique du solide au centre de masse C est relié à son
vecteur vitesse de rotation V par une relation simple de la forme :
LC = [I]C V
On sait que le mouvement d’un solide est caractérisé a priori par six degrés de liberté ; par conséquent l’application des théorèmes généraux, qui fournit six équations scalaires, permet de déterminer
ce mouvement si les forces qui s’exercent sur lui sont connues, c’est-à-dire si le solide n’est pas soumis à des liaisons.
Dans le cas où les réactions aux liaisons ne sont que partiellement connues, il est indispensable de
comparer le nombre de degrés de liberté et le nombre d’équations.
Si le solide a un point fixe, le nombre de degrés de liberté se réduit à trois ; il est alors préférable
d’appliquer le théorème du moment cinétique en ce point. Sinon, il vaut mieux appliquer ce théorème
au centre de masse C. On a alors :
dP
= Ma C = Sex
dt
et
d LC
= MC,ex
dt
avec LC = [I] C V
Enfin, on exploite efficacement ces équations en adoptant des axes commodes et en cherchant des
constantes de mouvement : si toutes les forces sont parallèles, la projection de la quantité de mouvement du solide suivant cet axe est constante ; si le solide tourne autour d’un axe, on applique le théorème du moment cinétique en projection sur cet axe.
Nous envisagerons ultérieurement plusieurs exemples concrets de mouvements d’un solide (cf.
chapitres 25 et 26).
IV . — APPLICATIONS DES THÉORÈMES GÉNÉRAUX
Les applications des théorèmes généraux de la dynamique aux systèmes matériels sont très nombreuses, car elles concernent tous les systèmes, déformables ou non, vivants ou non. Nous allons d’abord
expliciter, sur un système déformable simple constitué de deux solides, la démarche d’analyse la plus appropriée pour minimiser les risques d’erreurs. Nous donnons ensuite quelques exemples d’application
aux systèmes vivants, contrairement à l’ancien point de vue vitaliste, selon lequel ces systèmes ne satisferaient pas aux lois de la physique.
IV . 1 . — Système articulé
Considérons, par rapport au référentiel terrestre, le mouvement d’un système déformable S d formé
de deux solides (1) et (2) articulés, une tige T et un disque D (Fig. 18.6).
y
g
D
θ
T
O
T
ψ
F IG . 18.6.
D
x
319
Dynamique des systèmes matériels
a) Définition du système
Définir un système, c’est délimiter la frontière qui le sépare de l’extérieur. On dit parfois isoler,
mais ce terme ayant un sens précis en physique (influence nulle du milieu extérieur), il vaut mieux
l’éviter. Dans l’étude du mouvement de ce système, on pourra appliquer les théorèmes généraux soit à
l’ensemble du système soit au disque seul.
b) Nature du référentiel
Généralement, le référentiel considéré est le référentiel terrestre R. Comme nous l’avons vu au
chapitre 7, ce référentiel réalise, avec une excellente approximation, un référentiel galiléen, pourvu
que l’on introduise la notion de poids et que la force de Coriolis terrestre soit négligeable, ce qui est
généralement le cas. Si le référentiel d’analyse est en mouvement accéléré par rapport à R, il faut
ajouter, dans le bilan des forces, les forces d’inertie d’entraînement et de Coriolis.
c) Nombre de degrés de liberté
C’est le nombre de paramètres indépendants permettant de déterminer la position du système. Dans
l’exemple considéré, la position de la tige est définie par un paramètre angulaire c puisque ce solide a
un point fixe et que son mouvement de rotation est contenu dans un plan. La position du disque est, elle,
définie par l’angle u, puisque le disque tourne dans son plan et que son centre est un point de la tige.
Au total, le système possède donc deux degrés de liberté.
d) Bilan des forces
i) Forces extérieures
Le poids de la tige −mg e y appliqué en son milieu T, le poids du disque −Mg e y appliqué en son
centre D, le torseur des actions en O de vecteur RO, lequel est normal au plan Oxy si la liaison est
parfaite (cf. chapitre 20).
ii) Forces intérieures
Le torseur des actions de contact en D qu’exerce la tige sur le disque, de vecteur R D et de moment
GD, normal à ez si la liaison est parfaite, et le torseur des actions disque sur tige [−R D , −GD ].
c Dunod – Toute reproduction non autorisée est un délit
e) Application des théorèmes généraux
Les théorèmes généraux fournissent deux équations différentielles comportant uniquement les
inconnues c et u. Dans le cas considéré où les liaisons sont supposées parfaites (cf. chapitre 20),
GOz = 0 et GDz = 0. On obtient alors directement les deux équations différentielles en appliquant le
théorème du moment cinétique en projection, respectivement :
i) à l’ensemble S d, au point fixe O :
d LO
= OT × mg + OD × Mg + G O
dt
ii) au disque D, en son centre de masse D,
(2)
d LD
= GD
dt
Il est ainsi judicieux, pour obtenir directement le mouvement, d’appliquer le théorème du moment cinétique en un point où une réaction s’exerce afin d’éliminer cette inconnue. Le théorème de la quantité de
mouvement sert alors à déterminer la réaction, une fois le mouvement connu.
320
18. Dynamique des systèmes matériels
f) Comparaison du nombre d’équations et du nombre d’inconnues
Cette étape permet de faire le bilan du nombre E d’équations fournies par les théorèmes généraux,
a priori six équations scalaires par solide, et du nombre I d’inconnues égal au nombre de paramètres
nécessaires pour fixer la position du système (degrés de liberté) augmenté du nombre d’inconnues supplémentaires introduites par les forces de contact. Une fois assuré que E = I, on passe à l’étape de
projection dans une base commode, ce denier choix étant d’ordre uniquement technique.
g) Projection des équations vectorielles
En fonction des paramètres c et u, les moments cinétiques de S d en O et de D en D s’expriment comme suit, en utilisant la propriété d’additivité et le théorème de Kœnig :
(1)
(2)
L O = LO + L O
avec
(1)
LO =
ml 2
ċ ez
3
(2)
(2)
et L O = Ml2ċ ez + LD
(2)
En outre, LD et OT × mg + OD × Mg s’explicitent respectivement selon :
MR2
u̇ ez
2
et
R
(ml/2 + Ml) cos c
(ml/2 + Ml) sin c
0
×
R
0
−g
0
On obtient alors les deux équations différentielles suivantes :
ml2
MR2
l
c̈ + Ml2 c̈ +
ü = − m + Ml g cos c
3
2
2
et
MR 2
ü = 0
2
h) Résolution des équations différentielles
La deuxième équation donne évidemment : u̇ = Cte = u̇0 . Quant à la première, elle s’écrit aussi,
en posant ε = c + p/2,
ml2
l
+ Ml2 ε̈ + m + Ml g sin ε = 0
3
2
On reconnaît, si ε est petit (c ≈ −p/2) , l’équation caractéristique d’un oscillateur harmonique de
pulsation v0 et de période T 0 = 2p/v 0 (cf. chapitre 10) :
v 20 =
(m/2 + M) g
(m/3 + M) l
i) Analyse critique des solutions
Cette dernière phase a au moins le mérite de rappeler que la mécanique est une discipline expérimentale. Il convient donc de tester la valeur du modèle représentant le système réel étudié.
En outre, elle permet de s’assurer qu’aucune erreur ne s’est glissée : on a pu « oublier » une force,
se tromper de signe dans une projection, etc. Ce type d’erreur peut être évité en comparant les résultats
obtenus à une analyse intuitive rapide : par exemple une erreur de signe dans l’équation différentielle du
mouvement d’un système qui « doit osciller » peut être corrigée aisément.
Une manière de détecter efficacement la plupart des erreurs faites par des débutants consiste à
contrôler systématiquement l’homogénéité des formules physiques : toute comparaison n’a de sens que
si elle concerne deux grandeurs de même dimension. Enfin, les ordres de grandeurs constituent aussi un
moyen puissant de contrôle, d’où l’intérêt des applications numériques concrètes.
321
Dynamique des systèmes matériels
IV . 2 . — Systèmes vivants
Nous allons analyser le mouvement de quelques exemples de systèmes constitués d’êtres vivants,
en commençant par une transposition de la célèbre expérience de Galilée sur la chute d’un corps du haut
du mât d’un voilier.
a) Chute d’un chat du haut du mât d’un voilier
Répétons la célèbre expérience de la chute d’un boulet du haut du mât d’un voilier R , en mouvement de translation rectiligne uniforme par rapport au référentiel terrestre R g , à la vitesse constante
v e . On sait que le boulet tombe à la verticale du mât. Mais qu’en serait-il si on remplaçait cet objet inanimé par un chat ? S’introduirait-il dans l’expérience « un élément de contingence qui ne rendrait plus
nécessaire qu’il ne vienne s’écraser au pied du mât » ?
Le résultat obtenu est évidemment celui que prévoit l’analyse newtonienne, à partir de la simple
application des théorèmes généraux de la dynamique au chat.
i) D’après le théorème de la quantité de mouvement, on a, par rapport à R galiléen, en négligeant
l’influence de l’air :
dP
= Mc aC = Mc g
dt
d’où
aC = g
vC = g t
et rC =
1 2
gt
2
puisque la vitesse initiale est nulle et l’origine prise à la position initiale. Le centre de masse du chat a
donc même trajectoire que celle du boulet. Si la hauteur est h = 4 m , la durée de chute est :
tc =
2×4
9, 81
1/2
≈ 0, 9 s
ii) L’application du théorème du moment cinétique au centre de masse mobile C du chat conduit
à un moment cinétique constant, puisque le moment du poids en C est nul :
c Dunod – Toute reproduction non autorisée est un délit
d LC
=0
dt
entraîne
L C = Cte
Rien n’empêche évidemment le chat de tourner autour de C , en se déformant, de telle sorte que son
moment cinétique en ce point garde sa valeur initiale nulle. Cette capacité à se retourner doit être attribuée aux capacités propres de l’animal et donc aux forces intérieures au chat, qui n’interviennent pas
dans la conservation du moment cinétique (cf. chapitre 20).
b) Poids d’un aquarium ouvert lorsque le poisson qu’il contient se met en mouvement
Un aquarium de masse M a = 5 kg , reposant sur le plateau de gauche d’une balance, est en équilibre avec une tare, de même masse, placée sur le plateau de droite. Il contient un poisson initialement
immobile de masse m = 100 g incluse dans Ma.
Lorsque le poisson se met en mouvement dans l’aquarium, la quantité de mouvement du système
constitué par l’aquarium varie puisque le centre de masse du système {aquarium-poisson} se déplace.
Notons que le système n’est pas isolé : certes le poids de l’aquarium demeure constant, mais pas la
réaction qu’exerce le plateau sur lui.
L’équilibre de la balance est celui des plateaux, précisément des forces de réaction R a et Rt
qu’exercent respectivement l’aquarium sur le plateau de gauche et la tare sur le plateau de droite.
322
18. Dynamique des systèmes matériels
En appliquant le théorème de la quantité de mouvement à l’aquarium et à la tare (masse M t ), on
obtient respectivement :
d Pa
d Pt
= Ra + M a g et
= Rt + Mt g
dt
dt
Il en résulte, puisque Ma = Mt :
R a = Rt +
d Pa
d Pt
−
dt
dt
R a = Rt +
soit
d P x,a d Px,t
−
dt
dt
en projection selon l’axe Ox vertical descendant.
Initialement, il y a équilibre des plateaux car les quantités de mouvement sont toutes deux nulles :
Ra = Rt . Si le poisson acquiert un mouvement selon la verticale, l’équilibre est rompu selon :
Ra = R t +
d P x,a
dt
Si le poisson, initialement au fond de l’aquarium, remonte brutalement, l’avantage est au plateau de la
tare qui s’enfonce ; avec un vecteur accélération vertical de 5 m.s −2 , on trouve :
Ra < Rt
puisque
d Px,a
≈ −0, 1 × 5 = −0, 5 N
dt
à comparer à Ra et Rt qui valent tous deux à l’équilibre 5 × 9, 8 = 49 N . Cette différence est aisément
détectable avec une balance sensible.
c) Peintre sur une nacelle avec poulie
Pour se hisser le long d’un mur, un peintre, de masse m p = 70 kg , utilise une nacelle, de masse
mn = 20 kg , et une corde enroulée sur une poulie. L’une des extrémités est attachée à la nacelle et
l’autre à un contrepoids K , de masse MK (Fig. 18.7). Par contact au point H de la corde qui porte K ,
le peintre exerce la force de tension F p→c dirigée selon la verticale. La corde est supposée inextensible
et de masse négligeable.
Appliquons le théorème de la quantité de mouvement au système nacelle-peintre, par rapport au
référentiel terrestre. Il vient, en désignant par C le centre de masse de ce système, par T(N ) la tension
du fil à l’extrémité supérieure N de la nacelle et par Fc→p la force exercée par la corde sur le peintre :
(mn + m p)a C = (mn + m p)g + T(N) + Fc→p
soit
(mn + mp)z̈ = −(mn + mp )g + T (N ) − Fp→c,z
en tenant compte de l’opposition des forces réciproques et en projetant selon la verticale ascendante.
Pour le contrepoids et le brin de corde, on obtient de façon analogue, puisque la corde est de masse
négligeable :
M K aC = MK g + T(H) + Fp→c
soit
MK z̈ = MK g − T (H ) + Fp→c,z
car, la corde étant inextensible, les accélérations de C et de C sont identiques. Il vient, en sommant
les deux équations projetées membre à membre, les tensions T (N ) et T (H) étant égales (corde inextensible et poulie de masse négligeable) :
(mn + mp + MK ) z̈ = (M K − m n − mp)g
soit
z̈ =
M K − mn − mp
g ≈ 0, 52 m.s−2
M K + mn + mp
323
Dynamique des systèmes matériels
L’accélération est nulle si M K = m n + m p . Dans ces conditions, l’application du théorème de la
quantité de mouvement à l’ensemble {peintre-nacelle-contrepoids} donne :
dP
= (M K + mn + m p) g + R = 0
dt
d’où
R = −2(mn + m p) g
On suppose réalisée la condition précédente, le contrepoids étant au même niveau que la nacelle,
de telle sorte que le peintre peut se voir dans un miroir plan accroché au contrepoids. Le peintre grimpe
le long du brin de corde NI qui tient la nacelle, afin d’atteindre la poulie.
Écrivons à nouveau le théorème de la quantité de mouvement aux deux systèmes, le peintre avec la
nacelle d’une part et le contrepoids d’autre part. On a, respectivement, en désignant par Q le point où
le peintre se trouve sur la corde :
d Pp
= (mn + mp )g + T(Q)
dt
et
d PK
= M Kg + T(K )
dt
Comme MK = mn + mn et T(K) = T(Q) , les accélérations de part et d’autre sont égales. Les vitesses
aussi puisque leurs valeurs initiales le sont. Il en résulte que le contrepoids se déplace vers la poulie avec
la même vitesse que le peintre, ce qui permet à ce dernier de s’observer au cours de l’ascension.
J
T(H)
I
T(N)
N
H
Mur
g
K
Nacelle
Contrepoids
c Dunod – Toute reproduction non autorisée est un délit
F IG . 18.7. — Peintre sur une nacelle avec poulie
V . — LOIS DE CONSERVATION
V . 1 . — Variation de la quantité de mouvement et du moment cinétique
Nous avons vu que la quantité de mouvement et le moment cinétique d’un système matériel quelconque étaient des grandeurs conservatives, c’est-à-dire que, dans le bilan de ces grandeurs, les termes
de création de quantité de mouvement et de moment cinétique sont toujours nuls ; quant aux forces et
aux moments, ils traduisent l’échange avec le milieu extérieur :
DP = P(r) =
Fex d t
(r)
et DL O = LO =
MO,ex d t
324
18. Dynamique des systèmes matériels
V . 2 . — Conservation de la quantité de mouvement et du moment cinétique
Pour un système S d isolé, c’est-à-dire seul dans l’espace ou soumis à des actions négligeables, on
a Sex = 0 et MO,ex = 0. Il en résulte que P et LO se conservent :
DP = P(r) = 0
(r)
et DL O = L O = 0
d’où
P = Cte
et
LO = Cte
Il en est de même si le système est soumis à des forces et des moments qui se neutralisent : S ex = 0 et
MO,ex = 0 ; on dit qu’il est pseudo-isolé. Ce cas est très fréquent.
V . 3 . — Exemples de conservation
a) Boule sur un plan horizontal
Considérons une boule se déplaçant sans frottement sur un plan horizontal ; comme la boule reste
en contact avec le plan, elle est soumise à deux forces verticales (pesanteur et réaction normale) qui
s’annulent. Sa quantité de mouvement est donc constante.
b) Danseuse en rotation et personne sur un tabouret d’inertie
Le système déformable que constitue une danseuse tournant autour d’un axe vertical est soumis au
poids et aux actions de contact exercées par le sol (Fig. 18.8). Or le poids étant vertical, son moment
par rapport à l’axe vertical est nul. En outre, le moment des actions de contact suivant l’axe est aussi nul
car la liaison avec le sol peut être supposée parfaite (cf. chapitre 20). Le moment de toutes les actions
extérieures par rapport à l’axe de rotation est donc nul. Il en résulte que le moment cinétique par rapport
à cet axe est constant. Ainsi, en ramenant ses bras le long du corps, ce qui diminue son moment d’inertie,
la danseuse augmente sa vitesse de rotation.
Ωi
Ωf
Ωi
Ωf
g
B2
F IG . 18.8.
B1
F IG . 18.9.
Une variante pédagogique de cette expérience consiste à illustrer la conservation de la projection
verticale du moment cinétique du système constitué d’une personne portant des masses identiques à bout
de bras et assise sur un tabouret (Fig. 18.9) ; ce dernier tourne parfaitement autour d’un axe vertical, ce
qui implique, comme nous le verrons plus loin (cf. chapitre 20), que la projection du moment des actions
de contact axe-tabouret sous ce dernier soit nulle.
Lorsque la personne, initialement les bras tendus, ramène ses bras le long du corps, la vitesse de
rotation finale Vf du système, assimilé à un solide, est plus élevée que sa vitesse de rotation initiale
Vi . On a, en effet, en raison de la conservation de la composante du moment cinétique suivant l’axe de
rotation :
d’où
Vf > V i
Ii Vi = I f V f
puisque les moments d’inertie satisfont à l’inégalité If < Ii .
325
Dynamique des systèmes matériels
Ordre de grandeur : une danseuse peut tripler sa vitesse de rotation initiale, qui est de l’ordre d’un
tour par seconde, en ramenant ses bras le long du corps. En effet, si on la représente par un cylindre de
masse m = 55 kg et de rayon de gyration 15 cm , lorsque ses bras, de longueur 50 cm et de masse
3,5 kg, sont verticaux, on a :
2 × 3, 5 × (2 × 0, 5) 2
ml 2
= 1, 2 +
= 3, 5 kg . m 2
3
3
Soulignons que seules les actions extérieures (poids et action de contact axe-tabouret) interviennent, d’où l’inutilité d’analyser le rôle précis des forces intérieures, par exemple l’action du corps
sur les bras. En outre, le seul référentiel à considérer est celui du laboratoire, pratiquement galiléen,
dans lequel évidemment aucune force d’inertie n’est à considérer. Raisonner dans le référentiel non galiléen lié au tabouret est inutile, inefficace et source d’erreurs.
I f ∼ 55 × 0, 152 = 1, 2 kg . m 2
et Ii ∼ If +
Remarque : Les cuisiniers affirment pouvoir distinguer un œuf dur d’un œuf cru en les faisant tourner
sur la table de travail autour d’un axe vertical. Le premier garde pratiquement sa vitesse
angulaire car son moment d’inertie ne change pas ; le second s’immobilise rapidement
car, en tournant, les masses intérieures s’éloignent de l’axe de rotation et augmentent le
moment d’inertie.
c) Mise en mouvement d’un tabouret d’inertie à l’aide d’une roue en rotation
Une personne, assise sur un tabouret d’inertie au repos et tenant à bout de bras l’axe horizontal
d’une roue en rotation, peut provoquer la mise en rotation du tabouret en inclinant l’axe de la roue par
rapport à l’horizontale (Fig. 18.10). En effet, on a, d’après la conservation du moment cinétique, suivant
l’axe vertical Oz, du système constitué de la personne sur le tabouret (t, p) et de la roue (r) :
,p
LOz = 0 = LtOz
+ LrOz
d’où
t,p
LOz = −L rOz
Ainsi, les moments cinétiques suivant l’axe vertical de la personne sur le tabouret et de la roue sont
opposés. Il en résulte que le tabouret et la roue tournent en sens inverses.
L
(t,p)
LOz
(r)
c Dunod – Toute reproduction non autorisée est un délit
LOz
T
w
L
Lune
a)
b)
F IG . 18.10.
Terre
F IG . 18.11.
d) Conservation du moment cinétique de la Lune
Du fait de son mouvement de révolution autour de la Terre et de sa vitesse de rotation propre V L
autour de son axe de rotation, la Lune, assimilée à une sphère de masse ML et de rayon R L , possède
un moment cinétique total LT (Fig. 18.11). Ce dernier a pour expression, en désignant par r = TL la
distance Terre-Lune et ẇ la vitesse angulaire du mouvement orbital :
2
L T = TL × M L vL + L∗ avec TL × ML vL = ML r2ẇ e z et L∗ = IV ≈ ML R 2LV L
5
On sait que le moment cinétique orbital se conserve puisque la force de gravitation exercée par la Terre
est centrale (cf. chapitre 12). Quant au moment cinétique propre, il se conserve aussi puisque le moment
326
18. Dynamique des systèmes matériels
des actions gravitationnelles au centre L est nul. Comme la vitesse angulaire ẇ de révolution est égale
à la vitesse de rotation propre VL , la Lune présente toujours la même face à la Terre.
CONCLUSION
Il convient de retenir les points fondamentaux :
(1) Les théorèmes généraux de la dynamique des systèmes matériels fermés quelconques s’écrivent, en
un point fixe O :
dP
d LO
= maC = Sex et
= MO,ex
dt
dt
Ces dérivées s’entendent relativement au référentiel R par rapport auquel on étudie le mouvement. Si
R n’est pas galiléen, il faut ajouter les forces d’inertie d’entraînement et de Coriolis.
(2) Dans le cas d’un solide S, le théorème du moment cinétique ne diffère de ce qui précède que par
l’équation qui relie le moment cinétique au centre de masse C et le vecteur vitesse angulaire de rotation
de S par rapport à R :
LC = [I]C V
Pour la technique du calcul, précisons que la quantité de mouvement et le moment cinétique sont souvent
exprimés dans une base liée au solide qui ne coïncide pas nécessairement avec la base du référentiel par
rapport auquel on applique les théorèmes généraux. Il faut alors utiliser la composition des dérivations
de Bour.
(3) Par une démarche rationnelle d’analyse on peut aboutir de façon rapide et sûre aux équations différentielles du mouvement d’un système déformable. Une fois ces équations résolues, il convient de
contrôler ces résultats, sinon par l’expérience, au moins par notre intuition newtonienne. Il n’est pas inutile d’ajouter que les théorèmes généraux concernent aussi les systèmes vivants.
(4) Enfin, des exemples d’illustration de cas où la quantité de mouvement et le moment cinétique se
conservent rappellent qu’il convient d’exploiter les équations vectorielles avant de les expliciter en trois
équations dans une base quelconque.
EXERCICES ET PROBLÈMES
P18– 1. Conservation de la quantité de mouvement
Un homme, de masse m 1, se trouve sur un radeau de masse m 2 qui repose à la surface d’un lac. La
résistance de l’eau est négligée. Trouver la relation entre le déplacement r1 de l’homme sur le radeau
et le déplacement Dr2 du radeau par rapport à la rive. Commenter.
P18– 2. Conservation du moment cinétique
Un homme, assimilé à un point matériel de masse m, se déplace sur le bord d’un disque circulaire,
avec une vitesse vh par rapport au disque. Ce dernier, de masse M et de rayon R, peut tourner sans
frottement autour de son axe de révolution vertical. Initialement l’ensemble est au repos.
1. Donner les expressions des moments cinétiques du disque et de l’homme.
2. Établir la relation entre la vitesse de déplacement de l’homme sur le disque et la vitesse de
rotation du disque. En déduire l’angle dont on a tourné le plateau, en fonction du rapport des masses,
lorsque l’homme a parcouru un demi-tour.
327
Dynamique des systèmes matériels
P18– 3. Cerceau lesté roulant sans glisser sur une droite
Un cerceau homogène C (centre K, masse M, rayon R) lesté par un point matériel A (masse
m) situé sur son périmètre, roule sans glisser sur une droite fixe, horizontale, d’un référentiel terrestre
R = Oxyz. Son plan reste dans le plan Oxy, Oy étant la verticale ascendante et Ox un axe horizontal
(Fig. 18.12).
1. Trouver l’équation différentielle du mouvement en u = (KI, KA), à l’aide du théorème du
moment cinétique appliqué au point de contact I.
2. Quelle est la période des petits mouvements ?
y
g
r
O
g
C1
K
θ
m1
A(m)
A
I
x
F IG . 18.12.
r1
F IG . 18.13.
P18– 4. Mouvement du centre de masse d’une poulie mobile
Calculer l’accélération a 1, suivant la verticale ascendante, du centre C1 du disque dans le système
représenté par la figure 18.13, sachant qu’il y a roulement sans glissement des poulies sur le fil. La
grande poulie est un cercle matériel, de masse m1 et de rayon r1 ; la masse de A est m et celle de la
petite poulie négligeable. Discuter la valeur de a 1 suivant le rapport h = m/m1.
c Dunod – Toute reproduction non autorisée est un délit
P18– 5. Rupture d’une cheminée d’usine
Une tige homogène T , de masse m et de longueur l, tourne dans un plan vertical Oxy autour d’un axe horizontal Oz passant par l’une de ses extrémités O, fixe dans un référentiel terrestre
R = Oxyz. On désigne par u l’angle que fait la tige avec la verticale descendante Ox et par g la
norme du champ de pesanteur terrestre.
1. a) Appliquer les théorèmes généraux de la mécanique à la tige : le théorème de la quantité
de mouvement, en projection dans la base cylindrique {e r, eu , ez}, et le théorème du moment cinétique en O. On admet que le torseur des actions de contact en O a pour éléments de réduction R et
GO→T = G O→T ez :
b) En déduire une intégrale première du mouvement, sachant que u̇ = 0 lorsque u = p.
c) Montrer que la réaction R qui s’exerce sur la tige a pour expression :
3mg
mg
R = −a mg cos u −
er+
sin u eu
2
4
a étant un facteur positif que l’on déterminera.
2. La tige OT en léger mouvement autour de sa position u = p représente schématiquement une
cheminée d’usine fixée au sol en O (Fig. 18.14). On se propose d’évaluer la répartition de la tension
qui s’exerce en un point quelconque K de la tige situé à la distance r de O. Pour cela, on considère
328
18. Dynamique des systèmes matériels
la portion de tige OK formant le solide S1 et on désigne par [R2→1 , G2→1,K ] le torseur des actions
qu’exerce sur S1 le reste KT de la tige.
(1)
a) Montrer que le moment cinétique de S 1, au point K , a pour expression : L K = −g(mr3/l) u̇ e z,
g étant une constante positive que l’on déterminera.
b) Appliquer le théorème du moment cinétique à S 1 au point mobile K. En déduire que G 2→1,K
se met sous la forme : G2→1,K = lmgl sin u u(1 − u)2 ez , u étant le rapport r/l et l un facteur positif
que l’on déterminera.
c) Représenter avec soin le graphe f (u) = u(1 − u) 2 dans le domaine 0 u 1. Montrer que la
valeur de G2→1,K passe par un maximum pour une valeur de u que l’on calculera. En déduire l’endroit
de la cheminée où se produit préférentiellement une éventuelle rupture.
y
T
K
B
I
g
r
Oz
C
θ
y
O
x
F IG . 18.14.
α
A
x
F IG . 18.15.
P18– 6. Mouvement d’une barre en contact sans frottement avec deux plans perpendiculaires
Une barre AB homogène, de section négligeable (masse m, longueur l), est posée sans vitesse
initiale dans le plan vertical Oxy : les extrémités A et B sont en contact, sans frottement, avec les axes
Ox et Oy respectivement (Fig. 18.15). On repère la position de la barre par l’angle a = (Ox, OC). À
l’instant initial a = a0 .
1. Quelle est la trajectoire de C ? Appliquer le théorème du centre de masse et en déduire deux
équations du mouvement.
2. Trouver l’équation du mouvement en a, à l’aide du théorème du moment cinétique au point
mobile I, intersection des directions des réactions de contact en A et B.
3. En déduire une intégrale première du mouvement, c’est-à-dire une équation reliant ȧ et a.
4. Écrire la condition qui réalise la rupture du contact avec le plan vertical. Exprimer, en fonction
de a0 , la valeur a1 de a à l’instant où le contact en B cesse.
P18– 7. Mouvement d’une chaîne
Une chaîne métallique AB, de longueur constante L = 1 m et de masse M, est constituée d’un
ensemble de maillons assimilés à des points matériels reliés les uns aux autres. On la pose sur une table
horizontale, près d’un bord O, de telle sorte qu’une partie de la chaîne pende verticalement (Fig. 18.16).
1. Sachant que le frottement solide de la table sur la chaîne est négligeable, établir l’équation différentielle à laquelle satisfait le mouvement de l’extrémité basse B de la chaîne.
2. Quelle est la nature du mouvement ? Initialement x = 1 cm ; trouver la durée au bout de laquelle
la longueur x = OB est égale à L.
329
Dynamique des systèmes matériels
A
O
g
Table
B
x
F IG . 18.16.
P18– 8. Mécanique du football
Un ballon de football peut être considéré approximativement comme une sphère (creuse), de rayon
r = 11 cm et de masse M = 0, 420 kg . Cette sphère, en matériau polymère, d’épaisseur négligeable
devant r , renferme de l’air sous une pression de 2 bar et une température de 300 K . À titre d’information, les dimensions des terrains utilisés en France, lors de la Coupe du Monde 1998, étaient
105 m × 68 m .
1. a) La masse de l’air est négligeable devant celle de l’enveloppe du ballon assimilé à une sphère
(creuse). Trouver, en fonction de M et r , le moment d’inertie I du ballon par rapport à un axe passant
par son centre de masse C . Calculer I en précisant son unité SI.
b) Avec vos connaissances de thermodynamique, justifier l’approximation précédente par un calcul
simple du nombre de moles d’air contenues dans le ballon. On prendra comme valeur de la masse
molaire de l’air à 300 K : Mm = 29 g . On rappelle que 1 bar = 105 Pa et que la constante universelle
des gaz parfaits vaut R ≈ 8, 314 J.mol−1.K−1 .
2. Un joueur communique au ballon, selon l’axe horizontal Cx , une vitesse v C , de valeur
vC = 108 km.h −1 , ainsi qu’une rotation angulaire stationnaire V , orientée selon l’axe horizontal
Cy , perpendiculaire à vC (Fig. 18.17a).
a) Exprimer les vitesses des points supérieur et inférieur du ballon, si la vitesse angulaire vaut, en
tours par seconde, V = 5 tr.s−1 . Calculer ces vitesses en précisant l’unité SI.
b) Quelle devrait-être la valeur de V , en tour par seconde, pour que la vitesse du point inférieur
du ballon soit nulle ?
c Dunod – Toute reproduction non autorisée est un délit
c) Lorsque le ballon reste en contact avec la pelouse du terrain, la valeur précédente correspond
à une condition cinématique bien connue ; laquelle ? Les valeurs précédentes des vitesses sont-elles
réalistes dans une telle phase de jeu ?
3. On s’intéresse au cas où le ballon est tiré de l’un des quatre coins du terrain vers le gardien
adverse : c’est le coup de pied de coin ou corner. À l’instant initial, C se trouve au point O , situé à
11 cm du sol. Sa vitesse initiale vi est contenue dans le plan vertical Oyz qui fait un angle u avec
le plan vertical contenant les deux poteaux de la cage (Fig. 18.17b) ; dans ce plan, le vecteur vi est
incliné d’un angle ai par rapport au plan horizontal du terrain. En outre, la vitesse de rotation angulaire
communiquée par le tireur est nulle. On suppose qu’il n’y a pas de vent et que l’air ambiant n’exerce
aucune force ou moment sur le ballon.
a) Le référentiel R , lié au terrain, est supposé galiléen. Justifier, en quelques lignes les raisons
pour lesquelles un tel référentiel terrestre peut être considéré comme galiléen.
b) Écrire, sous forme vectorielle, pour le ballon, le théorème de la quantité de mouvement et le
théorème du moment cinétique au centre de masse C , par rapport à R . Dans ce dernier cas, le théorème
du moment cinétique peut être appliqué au point mobile C sans terme complémentaire. Justifier.
c) Quelles sont les équations différentielles du mouvement auxquelles satisfait le mouvement de C
dans ce plan ? Il s’agit d’un mouvement bien connu ; sans intégrer les équations différentielles, pouvez-
330
18. Dynamique des systèmes matériels
vous dire lequel et donner la nature de la trajectoire ? Montrer que la trajectoire de C est contenue
dans un plan que l’on précisera. Le tireur de corner peut-il envoyer le ballon directement dans la cage
adverse ?
d) Calculer la somme des moments des forces extérieures qui s’exercent sur le ballon. Ce dernier
acquiert-il une vitesse angulaire ? Si oui, calculer sa valeur en tours par seconde, si non, justifier.
4. Le tireur communique au ballon non seulement la vitesse initiale v i précédente contenue
dans le plan vertical OYz , mais aussi une vitesse angulaire V = Vz ez autour d’un axe vertical.
L’air ambiant exerce alors sur le ballon une force dite de Magnus, appliquée en C et d’expression
FM = 2ra b V × v C où ra = 1, 3 , en unité SI, est la masse volumique de l’air et b le volume du
ballon.
a) Quelle est la dimension physique de la quantité m = 2r a
b /M
? Calculer sa valeur.
b) Comment s’écrivent vectoriellement le théorème du centre de masse et le théorème du moment
cinétique en C ? Que peut-on dire du vecteur vitesse de rotation angulaire du ballon ?
c) Un tireur adroit envoie directement le ballon dans la cage adverse, en communiquant à V z un
signe convenable. Préciser lequel en le justifiant.
d) En décomposant la vitesse de C en deux contributions vectorielles, l’une verticale vC,v et
l’autre vC,h dans un plan horizontal, selon vC = vC,v + v C,h , montrer que vC,h satisfait à l’équation
vectorielle suivante :
d v C,h
= VM × vC,h
dt
VM étant un vecteur dont on donnera la direction, le sens et l’expression de la norme en fonction de m
et V . Commenter.
z
g
S
Terrain de football
x
Cy
vC
y
Premier
poteau
u
Oz
I
a)
b)
F IG . 18.17.
Second
poteau
19
Lois de Coulomb sur le frottement solide
Dans la pratique, il arrive très souvent que l’on ait à étudier le mouvement d’un solide en contact
avec un autre solide. On doit alors tenir compte, en plus des forces à distance telles que la pesanteur, de
nouvelles forces dites forces de contact (Fig. 19.1a). C’était le cas lorsqu’on avait étudié le mouvement
sans frottement d’un point matériel gêné astreint, par des liaisons bilatérale ou unilatérale, à demeurer
en contact avec un guide matériel (cf. chapitre 9).
C’est le cas aussi si on abandonne un solide S 1 sur un plan incliné S 2 (Fig. 19.1b) ; on constate
que le solide reste au repos pourvu que l’angle d’inclinaison soit suffisamment faible ; si l’on augmente
ce dernier, S 1 aborde un mouvement de glissement.
c Dunod – Toute reproduction non autorisée est un délit
Ces forces de contact jouent généralement un rôle essentiel dans la vie courante ; par exemple, la
marche à pied n’est possible que grâce à ces forces.
Bien qu’elles réduisent le nombre de paramètres dont dépend le mouvement d’un solide, l’étude
de ce mouvement est toujours plus difficile qu’en leur absence. En effet, le calcul de ces forces est très
complexe, car il dépend de la nature exacte de l’interaction entre des ensembles de particules, de la
position de ces particules au voisinage des surfaces et par conséquent de la structure fines des surfaces.
Ces forces ne sont donc pas fondamentalement simples, comme les forces de gravitation ou les forces
électromagnétiques : les quelques informations que l’on a sur elles sont valables dans des domaines
limités et on peut dire que leur complexité augmente avec la précision désirée.
Aussi est-il nécessaire de proposer d’abord un modèle macroscopique simplifié de ces actions.
g
g
Forces de contact
a
a)
b)
F IG . 19.1.
332
19. Lois de Coulomb sur le frottement solide
I . — ACTIONS DE CONTACT
I . 1 . — Modèle macroscopique
On schématise les actions de contact qu’exerce, sur un solide S 1 , un autre solide S 2 en considérant
que, sur la surface de S1, en contact avec S 2, agit un ensemble de forces. On désigne par R la somme
de ces forces de contact et par GI la somme de leurs moments (Fig. 19.2) ; R et G I sont les éléments
de réduction du torseur des actions de contact [R I ] au point I.
Introduisant le plan tangent commun Q et sa normale n, orientée vers le solide S 1 qui subit
l’action, R et G I s’écrivent aussi :
R = R t + Rn
et GI = G I,t + GI,n
Par définition, R n est la réaction normale, Rt la force de frottement ou force de résistance au
glissement ou force d’adhérence, G I,n le moment de résistance au pivotement, GI,t le moment de
résistance au roulement au point I.
Si le contact est quasi ponctuel, GI est négligeable, car les forces de contact passent toutes près de
I. Le plus souvent, on le suppose nul ; cependant, il est indispensable d’en tenir compte dans certains
cas, notamment lorsqu’il n’y a pas de frottement ou pas de glissement.
Rn
G
z
O
x
R
S1
Gn
Gt
y
Q
Rt
I
S2
R
F IG . 19.2.
I . 2 . — Origine microscopique des forces de contact
L’origine microscopique des forces de contact est de nature électromagnétique entre particules
chargées ; en comprimant un solide sur un autre, on réduit les dimensions des zones de confinement des
particules chargées qui constituent les solides. On montre alors que ces particules s’agitent davantage
en cognant plus souvent les parois de ces zones (cf. Quantique). Les forces moyennes qui résultent
à l’échelle macroscopique de la variation de quantité de mouvement, en un point I de la surface de
contact, sont alors bien décrites par les vecteurs R et GI .
II . — LOIS SUR LE FROTTEMENT SOLIDE
Les lois phénoménologiques du frottement de glissement entre solides ont été introduites dès le
siècle par Léonardo di Vinci puis étudiées par l’ingénieur français G. Amontons en 1699 et par
C. Coulomb en 1779.
XVe
333
Lois de Coulomb sur le frottement solide
II . 1 . — Réaction normale Rn
a) Son sens
La réaction normale exercée sur S 1, par le solide de S2 , est dirigée vers l’intérieur de S 1. Ce
résultat se conçoit aisément puisque la réaction s’oppose généralement à la pénétration d’un solide dans
l’autre : la réaction normale est donc une force répulsive. De même, la réaction normale qu’exerce S1
sur S2 est répulsive, puisque −R n est dirigée de S1 vers S2.
Du point de vue microscopique, on peut avancer que, lors de la pénétration de S 1 dans S2, les
atomes de S2 sont comprimés et donc exercent ensemble une force répulsive vers S 1.
Remarque : Si les solides sont de même nature et ont une grande surface de contact plane (deux glaces
ou deux glaçons par exemple), on observe au contraire une réaction attractive, car les
atomes appartenant aux deux solides peuvent se mêler intimement entre eux. Dans la
suite, nous exclurons ce cas singulier de solides possédant de grandes surfaces lisses de
contact.
b) Sa norme
La réaction normale a une valeur arbitraire qui dépend des conditions du mouvement ou de l’équilibre et des autres actions extérieures qui s’exercent sur S 1. Elle ne pourra donc être déterminée qu’une
fois le mouvement connu.
II . 2 . — Réaction tangentielle Rt
Les lois auxquelles satisfait la réaction tangentielle sont différentes suivant la valeur nulle ou non de
la vitesse de glissement vg , que l’on notera parfois explicitement v1/2, lorsqu’il s’agira du glissement
du solide S1 sur le solide S 2.
a) Cas où vg = 0
c Dunod – Toute reproduction non autorisée est un délit
Exerçons sur le solide S 1, en contact sans glissement avec le solide S2, une force de traction F
située dans le plan Q tangent en I aux surfaces limitant S1 et S 2 (Fig. 19.1b).
L’expérience montre que la vitesse de glissement reste nulle tant que F n’atteint pas une valeur
maximale Rt,m telle que :
Rt,m = m sRn
m s étant un facteur de proportionnalité appelé facteur d’adhérence statique ou de frottement statique.
Expérimentalement, on constate les deux propriétés suivantes exprimées sous forme de lois.
1e loi : Le facteur de frottement m s est indépendant de l’aire de la surface de contact.
2e loi : Le facteur de frottement m s est indépendant de Rn .
La courbe expérimentale représentée sur la figure 19.3a, relative au contact entre deux feuilles de
papier, traduit bien cette loi. On a donc, dans le cas du non-glissement, l’inégalité suivante :
Rt m sR n
Géométriquement, la réaction R est située à l’intérieur d’un cône de révolution, d’axe la normale en
I au plan Q, de sommet I et de demi-angle fs = arctan m s ; ce cône est appelé cône de frottement
(Fig. 19.3b).
334
19. Lois de Coulomb sur le frottement solide
Rt
14
R
10
6
S1
Ás
¹s = 0;38
Q
I
2
10
20
30
S2
Rn
a)
b)
F IG . 19.3.
b) Cas où vg = 0
1e loi : La force de frottement R t qu’exerce S 2 sur S1 a même support que la vitesse de glissement vg : R t × vg = 0.
2e loi : La force de frottement R t qu’exerce S2 sur S 1 a un sens opposé à celui de la vitesse de
glissement v g : Rt · vg < 0.
3e loi : Pour une vitesse de glissement fixée, la norme de la force de frottement est proportionnelle à la norme de la réaction normale. On a, en introduisant le facteur d’adhérence dynamique ou de
frottement dynamique m :
Rt = mRn
On définit aussi l’angle d’adhérence ou de frottement dynamique f par : tan f = m.
4e loi : Le facteur de frottement dynamique est indépendant de la vitesse de glissement, et inférieur
au facteur de frottement statique : m < ms.
Le tableau 19.1 donne les valeurs de m pour quelques matériaux.
Contact
m
acier – acier
0,2
bois – bois
0,3
garniture frein – acier
0,45
caoutchouc – bitume
0,6
TAB . 19.1.
Remarques : (1) L’étude du contact caoutchouc-bitume est décisive dans le choix des pneumatiques de
véhicules. Une analyse détaillée montre que la dépendance m(v g), dans ce cas, n’est pas
simple et qu’elle varie notablement avec la charge du véhicule et la pression de gonflage
(Fig. 19.4).
(2) On peut généraliser les lois de Coulomb au frottement de roulement et de pivotement.
Il suffit de remplacer v 1/2 et R t , respectivement par V 1/2,t et GI,t pour le frottement
de roulement, et par V 1/2,n et GI,n pour le frottement de pivotement ; les facteurs de
proportionnalité sont différents de m .
335
Lois de Coulomb sur le frottement solide
¹
Contact
pneumatique-bitume
¹s
m1
0
Patin S1
Piste S2
v 1/2
F IG . 19.4.
Ressort E
Fd
F IG . 19.5.
II . 3 . — Mesure du facteur de frottement
Pour déterminer expérimentalement le facteur de frottement statique entre deux surfaces planes de
solides S1 et S2 en contact, on exerce sur S1 une force F d, à l’aide d’un dynamomètre à ressort
(Fig. 19.5). À la naissance du glissement de S 1 sur S 2, la valeur F d de cette force de traction est égale
à msRn . On a donc, puisque Rn ≈ m 1 g :
ms =
Fd
m1 g
L’expérience faite avec deux plaques métalliques, dont l’une est recouverte d’une couche d’un matériau qui augmente l’adhérence, a donné le résultat suivant : Fd = 0, 5 dN pour m1 = 0, 1 kg, d’où
ms ≈ 0, 51.
Remarque : Une méthode de détermination du facteur de frottement m consiste à mesurer la période
des oscillations horizontales d’une plaque qui repose sur des galets (méthode de Timochenko) ; cette plaque est soumise à deux causes de mouvement antagonistes : l’une due
au sens de rotation des galets, l’autre à l’action du poids d’une masselotte (cf. Exercices).
c Dunod – Toute reproduction non autorisée est un délit
II . 4 . — Description plus précise du contact
Une analyse plus fine montre que le contact de deux surfaces est en réalité constitué de microcontacts dont l’aire effective A e est très inférieure à l’aire apparente des surfaces. Ces micro-contacts
se font par les aspérités qui parsèment les surfaces et se déforment sous l’action des forces normales et
tangentielles. Les composantes normale et tangentielle de la réaction R se mettent alors sous la forme :
Rn = pA e
et Rt,m = sA e
p étant un coefficient de pression associé à la réaction normale et s un coefficient de cisaillement, tous
deux caractéristiques du matériau. Il en résulte que :
ms =
s
Rt,m
=
p
Rn
On explique le faible domaine de variation de ms , lorsqu’on change de matériau, par une modification
dans le même rapport des coefficients s et p.
336
19. Lois de Coulomb sur le frottement solide
III . — APPLICATIONS
III . 1 . — Statique d’un solide sur un plan incliné
Considérons un solide S en contact avec un plan incliné d’un angle a par rapport à l’horizontale
(Fig. 19.6a). D’après le théorème du centre de masse, l’immobilité de S sur le plan implique que la
somme des forces extérieures soit nulle. En effet, on a :
maC = mg + R avec
aC = 0
R
y
Rn R
x
®
Rn
O
Filets
g
Vis
®
Rt
Rt
a)
b)
F IG . 19.6.
Explicitant suivant les axes Ox et Oy , il vient :
0 = mg sin a + Rt
et 0 = −mg cos a + R n
Rt et Rn étant les composantes tangentielle et normale de la réaction R . Par conséquent :
R n = mg cos a > 0 et Rt = −mg sin a < 0
Comme il n’y a pas de glissement :
|Rt | ms |Rn|
soit
tan a m s
et a f s
L’immobilité implique donc l’inégalité suivante :
a fs
f s étant le demi-angle du cône de frottement. Ce résultat, selon lequel le solide S ne glisse pas sur le
plan incliné pourvu que l’angle du plan soit inférieur à l’angle de frottement f s , est connu sous le nom
d’effet arc-boutement.
Il permet d’expliquer qu’une vis ne se desserre pas spontanément si la condition précédente est
respectée. Sur la figure 19.6b, on a représenté schématiquement une vis enfoncée verticalement dans
un bâti ; ce dernier exerce sur la vis et donc sur ses filets, inclinés d’un angle a par rapport au plan
horizontal perpendiculaire à l’axe de la vis, des forces verticales qui s’opposent à la pénétration de la
vis. Ainsi, l’un des filets est soumis à une force verticale ascendante R , de composantes R n selon la
normale au filet et Rt selon sa tangente. Comme dans le cas précédent, la vis restera immobile si la
condition a < f s est réalisée. Il en résulte, fs étant plus grand pour une vis à bois que pour une vis à
métal, que les angles choisis pour a sont différents dans les deux cas ; par exemple :
a(bois) ∼ 20 ◦
et a(métal) ∼ 8 ◦
337
Lois de Coulomb sur le frottement solide
Remarques : (1) La condition d’arc-boutement ne fait pas intervenir la masse du solide, ce que confirme
approximativement l’expérience. En effet, si l’on considère plusieurs solides, de même
nature, mais de masses différentes, en contact avec un plan incliné d’angle variable,
on constate qu’ils se mettent à glisser, de façon hésitante, à partir d’un certain angle
(Fig. 19.1b) ; ils s’arrêtent puis accélèrent, s’arrêtent à nouveau, etc. Ce comportement
s’explique par les qualités différentes des surfaces en contact et par toutes sortes de matériaux étrangers tels que poussières, graisses, oxydes, etc.
(2) Le cas singulier où a = p/2 correspond évidemment à l’impossibilité du contact :
Rn = 0 .
III . 2 . — Roue porteuse
Afin de comprendre l’intérêt de la roue porteuse, comparons les forces qui sont nécessaires pour
déplacer, à vitesse constante, deux masses identiques, l’une ayant la forme d’un cube et l’autre celle
d’un cylindre (Fig. 19.7).
y
y
R
g
C
O
R
g
F1
x
C
O
I
F2
x
b)
a)
F IG . 19.7.
a) Calcul de F1 pour un cube
Avec les notations habituelles, le théorème du centre de masse appliqué au cube (masse m ), qui
est soumis à son poids, à la réaction du plan horizontal et à F1 , s’écrit, puisque la vitesse est constante :
ma = mg + R + F1 = 0
En explicitant dans la base de Oxy , on obtient :
c Dunod – Toute reproduction non autorisée est un délit
0 = Rt + F1
et 0 = −mg + Rn
Il en résulte, puisqu’il y a glissement, que |Rt | = m|R n| . Comme R t < 0 , il vient Rt = −mRn et par
conséquent : F1 = mmg .
b) Calcul de F2 pour un cylindre
Si le cylindre (masse m , rayon r ) roule sans glisser, les théorèmes généraux donnent, la vitesse
du centre de masse C étant constante, ainsi que le moment cinétique en C :
ma = mg + R + F2 = 0
et
d LC
= GC = GI + CI × R = 0
dt
G I étant le moment des actions de contact en I . En explicitant, on obtient, puisque ẍ = −r ü , d’après
la condition de roulement sans glissement (ẋ + Ru̇ = 0) :
0 = R t + F2
0 = −mg + R n
I ü = −I
ẍ
= 0 = G Iz + rRt
r
338
19. Lois de Coulomb sur le frottement solide
Par conséquent, F2 = −Rt = G Iz/r . Comme le contact est quasi ponctuel, G Iz mmgr ; on en déduit
que :
F2 mmg
et
F2 F1
On explique ainsi ce que l’expérience courante montre quotidiennement : il est plus facile de faire rouler
un objet que de le faire glisser, d’où l’intérêt des véhicules à roues.
III . 3 . — Marche à pied
L’analyse des forces qui s’exercent sur une personne marchant sur un sol horizontal montre que
la marche n’est possible que grâce aux forces de frottement ! En effet, le théorème du centre de masse
appliqué à la personne, de masse M , donne (Fig. 19.8) :
MaC = Mg + R soit
Ma C = R t et 0 = M g + R n
selon le plan horizontal et la verticale respectivement.
Ainsi, le mouvement n’est possible que grâce aux forces de frottement. Il convient cependant de ne
pas attribuer à ces forces un rôle autre que celui d’un intermédiaire passif : c’est en prenant appui sur le
sol grâce aux frottements que l’individu peut se déplacer ; si les frottements sont insuffisants l’appui et
donc la marche sont impossibles.
g
g
y
r
x
R
C
I
®
Oz
F IG . 19.8.
F IG . 19.9.
III . 4 . — Roue motrice
La plupart des véhicules à roues se déplacent grâce à un moteur dont la fonction est d’imposer une
rotation à des roues motrices qui roulent sans glisser sur le sol. Les actions qui s’exercent sur la roue, de
centre de masse C , sont le couple-moteur M C = −Mm ez avec Mm > 0 (le signe moins est seulement
dû à l’orientation de l’axe des z ), le poids mg et la réaction R exercée par le sol.
Étudions dans quelles conditions, une telle roue peut rouler sans glisser, à vitesse constante, sur un
plan incliné dans le sens de la montée (Fig. 19.9). Pour cela, écrivons dans le référentiel R = Oxyz les
théorèmes généraux de la mécanique. Il vient :
d LC
= GI + CI × R + M C = 0
dt
puisque la vitesse de C est constante, ainsi que la vitesse angulaire en raison du roulement sans glissement. En explicitant dans la base de R , on obtient :
maC = mg + R = 0
0 = −mg sin a + Rt
et
0 = −mg cos a + Rn
et 0 = GIz + rR t − M m
Pour que la condition de non-glissement soit satisfaite, il faut que :
|Rt| ms|R n|
puisque Mm |GIz| .
soit
|M m − G Iz|
M
≈ m ms mg cos a
r
r
339
Lois de Coulomb sur le frottement solide
Par conséquent, la montée n’est possible que si :
i) L’adhérence m s est suffisamment grande. La bonne valeur de ms , dans le contact caoutchoucbitume ( ms ≈ 0, 6 ), explique la relative facilité avec laquelle un camion avec remorque franchit une
rampe inclinée. De ce point de vue, le contact acier-acier dans le transport par voie ferrée ( ms ≈ 0, 2 )
est un handicap pour obtenir une grande force de traction, alors qu’il est énergétiquement avantageux.
ii) La masse m des roues motrices est suffisamment grande ; c’est ce qui est réalisé dans les trains
de montagnes qui sont équipés de deux locomotives, non pour aller plus vite mais pour augmenter la
masse des roues motrices.
iii) Le couple moteur n’est pas trop grand, sinon il y a glissement et les roues patinent.
Remarque : L’analyse des équations du mouvement montre que la force de frottement Rt est, dans le
cas d’une roue motrice, dirigée dans le sens du mouvement : R t = mg sin a . Bien que ce
soit elle qui, en dernier lieu, permette la montée, il convient là aussi de ne pas lui attribuer
un rôle autre que celui d’un intermédiaire passif : le rôle actif est évidemment joué par le
couple-moteur M C .
III . 5 . — Disque vertical en mouvement sur un axe horizontal
Soit un disque D (masse m , rayon r ) posé verticalement sur l’axe horizontal Ox d’un référentiel
terrestre R = Oxyz , avec initialement une vitesse angulaire égale à u̇0 = −V 0 e z (V 0 > 0) et une
vitesse de son centre de masse C égale à v0 e x (Fig. 19.10).
y
D
g
C
r
N µ
I
O
Ω0
x
F IG . 19.10.
c Dunod – Toute reproduction non autorisée est un délit
Les forces extérieures étant le poids mg = −mg e y et la réaction du sol R = Rt ex + Rn ey , les
théorèmes généraux s’écrivent, pour le mouvement de D dans le plan vertical Oxy :
ma C = mg + R
et
d LC
= CI × R
dt
et
0
0
=
mr2 ü
2
ce qui donne, en explicitant dans la base de R :
m
ẍ
0 =
0
Rt
0
−mg + R n
0
0
0
−r ×
0
Rt
Rn
0
On obtient donc les équations suivantes :
ẍ =
Rt
m
rü =
2Rt
m
Rn = mg
Les deux premières équations contiennent les trois inconnues x, u, R t . Par conséquent, la prise en
compte des lois de Coulomb sur le frottement est indispensable.
340
19. Lois de Coulomb sur le frottement solide
Cependant, il convient, au préalable, d’étudier le comportement de la vitesse de glissement du
disque sur l’axe, vg = v I1 /R , I1 étant le point de D qui coïncide avec le point de contact géométrique
I . Comme I1 et C appartiennent à D , on a vI1 = v C + IC × V, ce qui s’explicite selon :
R
0
ẋ
0 + r
0
0
×
0
0 =
u̇
ẋ + ru̇
0
0
En combinant les équations du mouvement, on obtient :
d vg
3Rt
3Rt
= (ẍ + r ü) ex =
ex =
dt
m
m
On voit, en multipliant les deux membres de l’égalité par v g , que :
d
dt
v 2g
2
=
3Rt
·vg< 0
m
puisque R t et vg sont opposés. Ainsi, la norme de la vitesse de glissement v g ne peut que diminuer. Il
en résulte que le mouvement se termine par une phase sans glissement.
CONCLUSION
Énumérons les résultats essentiels.
(1) Les forces de contact jouent un rôle déterminant dans la vie courante, du fait de leur présence
dans la plupart des problèmes mécaniques concrets (vis, roue porteuse, roue motrice, etc.).
(2) Elles diminuent le nombre de degrés de liberté mais augmentent le nombre d’inconnues du
problème. En effet, ces forces phénoménologiques traduisent un effet global d’actions microscopiques
complexes, d’où une ignorance partielle de leurs expressions.
(3) Malgré leur caractère très approché, les forces de contact rendent compte de façon satisfaisante
du mouvement des solides. Deux cas doivent être considérés suivant que la vitesse de glissement vg
d’un solide sur l’autre est nulle ou non :
Si v g = 0 , on a l’inégalité Rt ms Rn .
Si v g =
0 , on a l’égalité Rt = mR n .
(4) Enfin, dans la méthode de résolution d’un problème où ces forces interviennent, il convient
de distinguer les différentes phases de mouvement, d’abord le glissement puis le non-glissement, et
de traduire algébriquement la relation entre les normes des composantes tangentielle et normale des
réactions.
Les aspects énergétiques des forces de contact seront étudiés ultérieurement (cf. chapitre 20).
341
Lois de Coulomb sur le frottement solide
EXERCICES ET PROBLÈMES
P19– 1. Mise en mouvement d’un bloc sur un plan incliné
Étudier le mouvement du système représenté sur la figure 19.11. La masse de la poulie est négligeable, le fil est inextensible et le facteur de frottement de la masse 2 sur le plan incliné est m. Application numérique : h = m1/m2 = 0, 5 ; a = 20◦ et m = 0, 15.
Barre
g
m2
x
g
Planche
α
F
m1
F IG . 19.11.
F IG . 19.12.
P19– 2. Contact de deux solides avec frottement
Une barre, de masse m 1, est placée sur une planche de masse m2 ; l’ensemble repose sans frottement sur un plan horizontal (Fig. 19.12). Le facteur de frottement entre la barre et la planche est m.
On exerce sur la planche une force horizontale F dont l’intensité croît linéairement avec le temps :
F(t) = at, a étant une constante.
1. Écrire les équations différentielles du mouvement de la barre et de la planche.
2. Déterminer l’instant t0 à partir duquel la planche glisse sous la barre.
3. Quelles sont les accélérations de la barre et de la planche dans les phases de non-glissement et
de glissement ?
P19– 3. Cylindre sur un tapis roulant incliné
c Dunod – Toute reproduction non autorisée est un délit
Un cylindre, de masse m, de rayon r, est posé, sans vitesse, sur un tapis roulant. Ce tapis, incliné
d’un angle a sur l’horizontale, se déplace à la vitesse constante v0 suivant l’axe Ox d’un référentiel
terrestre R = Oxyz (Fig. 19.13). On note g l’intensité du champ de pesanteur terrestre et m le facteur
de frottement.
1. Exprimer la vitesse de glissement v g en fonction de v 0 et des paramètres suivants : x C (position
du centre de masse C suivant l’axe x) et u (angle de rotation du cylindre).
2. Écrire les équations différentielles du mouvement.
3. Trouver, en fonction de g, a et m, la dérivée par rapport au temps de la vitesse de glissement.
4. Étudier les différentes phases du mouvement.
z
g
y
C
v0
θ
g
x
I α
O
O
C
y
I
x
F IG . 19.13.
F IG . 19.14.
P19– 4. Sphère sur un plan horizontal
Une sphère homogène (masse m, rayon r) se déplace en contact avec le plan horizontal Oxy
d’un référentiel terrestre R = Oxyz.
1. Écrire, sous forme vectorielle, le théorème du centre de masse C et le théorème du moment
cinétique appliqué en C (Fig. 19.14).
342
19. Lois de Coulomb sur le frottement solide
2. Établir la relation vectorielle entre la dérivée par rapport au temps de la vitesse de glissement v g
et la force de réaction tangentielle R t. En déduire que le mouvement final est toujours un mouvement
sans glissement.
P19– 5. Expérience de Timochenko : oscillations d’une barre reposant sur deux galets
Une barre de section carrée, de masse M et de centre de gravité C, repose en O 1 et en O 2 sur
deux galets G1 et G 2 de centres fixes. Elle est reliée par un fil à une masselotte, de masse m, qu’on
assimilera à un point A (Fig. 19.15).
Le galet G 1 est mis en rotation par un moteur, dans le sens indiqué sur la figure, avec une vitesse
angulaire constante et assez grande pour que le frottement en O1 , de facteur m constant, se fasse
toujours dans le même sens. Le galet G2 et la poulie P, sur laquelle s’enroule le fil, sont eux, en
revanche, mis en rotation par la barre ; ils tournent parfaitement autour de leurs axes et leurs masses
peuvent être négligées. Le contact en O2 entre la barre et le galet G 2 se fait sans frottement.
On suppose que le fil n’a aucune masse, aucune raideur et aucun allongement. On notera, comme
sur la figure, l la longueur O1O 2, 2h le côté de la section de la barre, F t la tension du fil, N1 et T1
les composantes de la réaction R 1 en O1 et N2 la composante normale de la réaction R2 en O2.
1. Appliquer le théorème de la quantité de mouvement successivement à la masselotte seule et à la
barre seule. Appliquer le théorème du moment cinétique à la barre seule.
2. En déduire, en fonction de x, N 1 et T1 .
3. Quelle est l’équation du mouvement ? Montrer que ce mouvement est oscillant. En déduire la
période des oscillations et l’abscisse du point autour duquel se font ces oscillations. Comment peut-on
utiliser ce dispositif pour mesurer le facteur de frottement m ?
N2
g
z
N1
2h
C
O2
G2
O1 T 1
x
l
G1
P
A
Ft
Ω0
g
x
S
x
O
F IG . 19.15.
F IG . 19.16.
P19– 6. Cylindre sur un plan horizontal
Un cylindre de révolution S, homogène, de masse M, de rayon R, est posé sur un plan horizontal
Oxy, le contact se faisant le long d’une génératrice (Fig. 19.16). À l’instant t = 0, son axe de révolution
est parallèle à Oy et son mouvement se réduit à une rotation de vitesse angulaire V 0 positive autour
de cet axe. Le facteur de frottement du cylindre sur le plan est m.
À quel instant t1 , la vitesse de glissement de S sur le plan s’annule-t-elle ? Quelle est la distance
parcourue entre t = 0 et t = t 1 ? Quel est le mouvement de S après t1 ?
P19– 7. Influence du freinage sur le mouvement propre d’un véhicule
Un véhicule se déplace en ligne droite suivant un axe horizontal Ox de telle manière que son plan
de symétrie coïncide avec un plan fixe que l’on prend comme plan de figure (Fig. 19.17). Toutes les
forces sont contenues dans ce plan. On suppose pour simplifier que les centres des roues sont à la même
hauteur h, au-dessus du sol, que le centre de masse C.
1. Quelle est la relation entre la vitesse du centre de masse ẋC et la vitesse de rotation des roues
u̇, du fait du roulement sans glissement ?
343
Lois de Coulomb sur le frottement solide
2. Appliquer le théorème du centre de masse et le théorème du moment cinétique dans le référentiel
du centre de masse.
3. En déduire les expressions des composantes normales N 1 et N 2 des réactions qu’exercent le
sol au niveau des roues.
4. Montrer que, si ẍC > 0, N 1 > N2 et si ẍC < 0, N 1 < N2. Commenter.
N2
N1
F IG . 19.17.
P19– 8. Différentes phases du mouvement d’un disque
c Dunod – Toute reproduction non autorisée est un délit
Un disque D (masse m, rayon r) est posé verticalement sur l’axe horizontal Ox d’un référentiel
terrestre R = Oxyz, avec une vitesse angulaire égale à u̇0 = −V0 ez (V0 > 0) et une vitesse de
son centre de masse C égale à v0 ex (Fig. 19.10). Étudier le mouvement dans les trois cas suivants :
v0 > rV0, v 0 = rV0 et v0 < rV0 . On représentera, dans chacun des cas, la vitesse de glissement et la
force de frottement en fonction du temps.
20
Énergétique des systèmes matériels
Le travail de l’ensemble des forces qui s’exercent sur un système matériel s’obtient en sommant les
travaux de toutes les forces appliquées aux différents points de ce système, forces extérieures et forces
intérieures au système.
Nous nous proposons de généraliser au cas de systèmes matériels quelconques, constitués de corps
ponctuels et de solides, la relation existant entre l’énergie cinétique d’un corpuscule et le travail des
forces appliquées. Nous serons alors conduits à établir, pour ces systèmes, les expressions de l’énergie
cinétique, de l’énergie potentielle et de l’énergie mécanique.
Nous analyserons enfin le cas important où, en raison de la nature parfaite des liaisons, l’énergie
mécanique du système se conserve.
Établissons d’abord l’expression du travail des forces qui s’exercent sur un système matériel.
I . — TRAVAIL DES FORCES QUI S’EXERCENT SUR UN SYSTÈME
Considérons, dans un référentiel R, un système de corps ponctuels, a priori déformable, S d , dont
l’élément générique Ai a une vitesse vi (Fig. 20.1).
z
F2→1
Sd
O
x
R
Fi
z0
A1
A2 Ai
Aj
F1→2
y
O
y
R0
x
F IG . 20.1.
345
Énergétique des systèmes matériels
I . 1 . — Travail des forces extérieures et travail des forces intérieures
On sait que la puissance des forces {A i , F i} qui s’exercent sur S d s’écrit, relativement à R (cf.
chapitre 13) :
Fi · v i =
F ex→i · vi +
Fj→i · v i = Pex + P in
P=
i
i
i,j
où Fex→i désigne la force qu’un élément extérieur à Sd exerce sur Ai et Fj→i la force qu’exerce,
sur ce même point Ai , un autre point A j de Sd. Le premier terme représente la puissance des forces
extérieures à Sd , le second, la puissance des forces intérieures.
La somme discrète
une distribution continue.
doit être remplacée par une intégrale si le système peut être représenté par
On obtient le travail élémentaire en multipliant P par la durée élémentaire d t :
où
dW = dW ex + dWin
dWex =
i
Fex→i · d OAi
et
dW in =
i,j
F j→i · d OAi
L’intégration entre les positions initiale et finale des différents points du système donne le travail des
forces extérieures à Sd et celui des forces intérieures à S d :
W ex =
i
et Win =
Fex→i · d OAi
i,j
Fj→i · d OAi
En général, le calcul de ces intégrales est facilité par les propriétés particulières des forces.
I . 2 . — Propriété remarquable du travail des forces intérieures
Nous nous proposons d’établir une propriété remarquable du travail des forces intérieures directement reliée à l’opposition des actions intérieures réciproques.
Exprimons, dans deux référentiels R et R en mouvement quelconque l’un par rapport à l’autre,
la puissance des forces intérieures à un système Sd (Fig. 20.1) :
c Dunod – Toute reproduction non autorisée est un délit
Pin =
i,j
Fj→i · v i
et P in =
i,j
Fj→i · vi
d’où
Pin − Pin =
i,j
Fj→i · (vi − v i )
En tenant compte de la composition des vitesses entre R et R , vi = v i + vO + V × O A i, si V est
le vecteur vitesse de rotation de R par rapport à R il vient :
Pin − Pin =
i,j
Fj→i · (vO + V × O A i ) =
i,j
Fj→i · vO +
i,j
O A i × F j→i · V
Comme la somme et le moment des forces intérieures sont nuls :
Sin =
Fj→i = 0
et MO,in =
i,j
i,j
O A i × Fj→i = 0
il en résulte que :
P in = Pin
et
dWin = dWin
Ainsi, la puissance et le travail des forces intérieures d’un système sont indépendants du référentiel par
rapport auquel on les calcule.
346
20. Énergétique des systèmes matériels
Ce résultat incite à calculer la puissance ou le travail des forces intérieures dans le référentiel où ils
sont les plus simples à étudier. C’est là une propriété remarquable que confère l’opposition des actions
réciproques.
Soulignons que P in et dWin sont en général non nuls.
Dans de nombreux cas, le travail des forces intérieures d’un système matériel déformable S d peut
se mettre sous la forme de la différentielle d’une fonction :
dW in = − d Ep,in (r 1, r2 , . . . , rn)
Ep,in étant l’énergie potentielle associée aux forces intérieures. C’est le cas de l’énergie gravitationnelle
ou de l’énergie électrostatique entre plusieurs charges électriques (cf. Électromagnétisme).
I . 3 . — Travail des forces extérieures. Énergies potentielles associées
Pour calculer le travail élémentaire des forces extérieures qui s’exercent sur chacun des éléments
du système, on somme sur tous ces éléments. Fréquemment, le travail élémentaire peut se mettre sous la
forme de la différentielle d’une fonction : dW ex = − d Ep,ex , Ep,ex étant l’énergie potentielle extérieure
associée.
a) Travail des forces de pesanteur. Énergie potentielle de pesanteur
Le travail élémentaire des forces de pesanteur qui s’exercent sur un système matériel a pour expression, si le champ de pesanteur g est uniforme, ce que nous supposerons (Fig. 20.2a) :
dW ex =
i
On a donc :
m ig · d OAi = g ·
i
mi d OAi = Mg · d OC = d(Mg · OC)
E pg = −Mg · OC + Cte
dWex = − d E pg avec
Si z C désigne la cote du centre de masse C suivant l’axe Oz vertical ascendant, E pg s’écrit :
E pg = Mgz C + Cte
Le travail du poids entre les positions 1 et 2 du centre de masse C est alors :
W ex = −DEpg = −{Mgz C }21 = Mg(zC,1 − zC,2 )
y
z
zC
O
x
ae
C
Sd
g
R
a)
y
y
O
O
z
R
z
R
b)
F IG . 20.2.
V
Hi
C
Ai
Sd
Sd
x
y
O
x
R
y
x
c)
R
347
Énergétique des systèmes matériels
b) Travail des forces d’inertie d’entraînement de translation. Énergie potentielle associée
Désignons par R = O x y z un référentiel en translation accélérée par rapport à un référentiel
galiléen R. Dans R, le travail élémentaire de la force d’inertie d’entraînement de translation a pour
expression, puisque aO ne dépend pas du point Ai de S d (Fig. 20.2b) :
dW ex = −
D’où :
i
mi aO · d OAi = −aO ·
dW ex = − d Epe
avec
i
m i d O A i = −MaO · d OC
E pe = MaO · OC + Cte
Cette expression est analogue à celle de l’énergie potentielle de pesanteur : le champ de pesanteur
uniforme g est remplacé par le champ d’accélération uniforme −aO .
c) Travail des forces d’inertie d’entraînement de rotation uniforme. Énergie potentielle centrifuge
Intéressons-nous au mouvement d’un système matériel S d par rapport à un référentiel R en rotation uniforme autour d’un axe fixe du référentiel du laboratoire R, supposé galiléen. Chaque élément
du système, de masse mi , est soumis à une force centrifuge de la forme mi V 2Hi Ai , V étant la vitesse angulaire de rotation uniforme de R par rapport à R et Hi la projection de A i sur l’axe de
rotation (Fig. 20.2c).
Calculons le travail élémentaire des forces centrifuges qui s’exercent sur le système :
dWex =
i
m i V2H iA i · d OA i = V 2
i
mi Hi Ai · d Hi Ai =
V2
2
mi d(H i Ai )2 = d
i
V2
IOz
2
puisque HiA i ·d OHi = 0 et IOz est le moment d’inertie du système par rapport à l’axe Oz. Finalement,
dW = − d Epc
avec
Epc = −
V2
IOz + Cte
2
II . — TRAVAIL DES FORCES QUI S’EXERCENT SUR UN SOLIDE
c Dunod – Toute reproduction non autorisée est un délit
II . 1 . — Travail des forces intérieures dans un solide
Associons au solide S considéré en mouvement par rapport au référentiel R un repère R
(Fig. 20.3). Dans R, tous les points du solide sont fixes ; par conséquent, la puissance des forces
dans ce référentiel est nulle : P in = 0. Comme cette puissance est indépendante du référentiel, en raison de l’opposition des actions réciproques, la puissance et donc le travail des forces intérieures à un
solide sont nuls :
P in = 0 et W in = 0
z z
S
y
O
y
O
x
x
R
R
S1
I1
Q
I
I2
S2
F IG . 20.3.
F IG . 20.4.
348
20. Énergétique des systèmes matériels
II . 2 . — Travail élémentaire des forces extérieures
Évaluons le travail élémentaire des forces extérieures qui s’exercent sur un solide S. Si A est un
point de S, il vient, compte tenu du champ des vitesses d’un solide, de vecteur vitesse angulaire V
par rapport au référentiel d’étude R :
Fex→i · vi d t =
dWex =
i
ce qui s’écrit :
dW ex =
i
Fex→i · v A d t +
i
Fex→i · (vA + Ai A × V) d t
(AAi × Fex→i ) V d t
i
soit
dW ex = (Sex · v A + MA,ex · V) d t
en désignant par Sex et M A,ex la somme et le moment des forces extérieures.
En introduisant le torseur des forces extérieures [F ex ]A et le torseur cinématique [v] du solide S,
le travail des forces extérieures qui s’exercent sur un solide se met sous la forme du produit scalaire des
deux torseurs précédents :
dWex = [Fex ][v] d t
II . 3 . — Travail des forces extérieures de contact
Appliquons le résultat général précédent au cas où la force extérieure qui s’exerce sur un solide S 1
est due à un autre solide S2 fixe dans R, en contact ponctuel en I avec S 1. Notant v I1 la vitesse du
point I1 de S1 qui coïncide avec I, R la somme des actions de contact qu’exerce S 2 sur S1 et G I
le moment en I de ces actions, il vient (Fig. 20.4) :
dW ex = R · vI1 d t + G I · V1 d t
V1/R désignant la vitesse de rotation de S 1 par rapport à R. Comme le contact est ponctuel, le
moment GI est nul. Il en résulte que dWex se réduit à :
dWex = R · vI 1 d t
Ce travail est nul dans deux cas :
1er cas : R est normal à vI1 qui est contenu dans le plan tangent Q : il n’y a pas de frottement.
Exemple : Une masselotte A glisse sans frottement sur une tige T qui tourne uniformément dans
un plan horizontal autour d’un axe vertical Oz avec la vitesse de rotation V (Fig. 20.5).
Relativement au référentiel R , dans lequel la tige est fixe, le travail dWex = R · vI 1/R d t est nul
car vI1 /R est normal à R.
En revanche, dans R, dW ex = R · vI1 d t n’est pas nul, car vI 1 /R n’est pas normal à R.
2e cas : v I1 = 0 et donc il n’y a pas de glissement, puisque v I1 = vI2 = 0, v I2 étant la vitesse du
point I2 de S2 qui coïncide avec I 1.
z z
g
V
y
O
x
R
T
A
R
R
x
F IG . 20.5.
y
vA
I2
I1
S2
F IG . 20.6.
S1
349
Énergétique des systèmes matériels
Exemple : Une sphère roule sans glisser sur un plan incliné. Bien que la réaction ne soit pas normale
au plan, la puissance des forces de contact est nulle, car la vitesse v I1 du point de la sphère en contact
avec le plan est nulle (Fig. 20.6).
III . — TRAVAIL TOTAL DES ACTIONS DE CONTACT ENTRE SOLIDES
Considérons deux solides S 1 et S 2 en mouvement par rapport à un référentiel R et assujettis à
rester en contact pseudo-ponctuel : le moment des actions de contact n’est pas négligeable. Notons I
l’un des points géométriques de contact et désignons par I1 et I2 les points respectifs de S 1 et S 2 qui
coïncident avec I à l’instant considéré (Fig. 20.4).
III . 1 . — Expression de la puissance totale des actions de contact
Si R 2→1 et G 2→1 sont la somme et le moment des actions de contact qu’exerce S 2 sur S1 , le
travail élémentaire de ces forces de contact s’écrit :
dW2→1 = (R2→1 · vI1 + G 2→1 · V 1 ) d t
D’après l’opposition des actions réciproques, le travail élémentaire des forces de contact qu’exerce S1
sur S2 en I est égal à : dW1→2 = −(R 2→1 · v I2 + G 2→1 · V2) d t. Donc, le travail élémentaire total
dWt a pour expression :
dWt = dW2→1 + dW1→2 = [R2→1 · (vI1 − vI2 ) + G 2→1 · (V1 − V2 )] d t
Finalement, en introduisant la vitesse de glissement de S 1 par rapport à S 2 en I et la vitesse angulaire
relative :
v1/2 = v I1 − vI2 et V1/2 = V1 − V2
on obtient l’expression suivante de la puissance totale des actions de contact :
Pt = R 2→1 · v1/2,I + G2→1,I · V 1/2
c Dunod – Toute reproduction non autorisée est un délit
Si R 2→1·v1/2,I = 0, on peut négliger légitimement le terme G 2→1,I ·V1/2 . Cela revient à assimiler
le contact à un contact ponctuel. Dans ce dernier cas, comme v 1/2,I est porté par le plan tangent en I et
que la composante tangentielle R2→1,t de R 2→1 est opposée à v1/2,I , la puissance totale des actions
de contact se réduit à :
Pt = R 2→1,t · v 1/2
En raison des lois de Coulomb sur le frottement (cf. chapitre 19), cette puissance est négative ou nulle.
Elle est nulle dans les deux cas suivants : s’il n’y a pas de glissement (v 1/2 = 0) et en l’absence de
frottement (R2→1,t = 0).
Rappelons que cette puissance totale est indépendante du référentiel par rapport auquel on la calcule, en raison de l’opposition des actions réciproques, d’où l’intérêt de la calculer dans le référentiel le
plus commode.
III . 2 . — Exemples
a) Masselotte sur une tige en rotation
Dans le cas de la masselotte glissant sur une tige en rotation (Fig. 20.5), la puissance totale des
actions de contact a pour expression :
Pt = R 2→1 · v1/2 = Rx ẋ
R 2→1 étant la force qu’exerce la tige T sur la masselotte A et v 1/2 = ẋe x , la vitesse de glissement
de A sur T .
350
20. Énergétique des systèmes matériels
b) Système articulé
Considérons le système articulé constitué par une tige T et un disque D articulés au centre D
de D (Fig. 20.7). L’autre extrémité O de T est fixe dans le référentiel R = Oxyz. Les actions de
contact interviennent en O où l’un des solides, le bâti, est fixe dans R et en D où les deux solides T
et D sont articulés.
(1)
Si R (1) et GO désignent la somme et le moment des actions de contact { axe Oz → T }, la
puissance totale des actions de contact en O s’écrit :
(1)
(1)
Pt = R(1) · vO/R + GO · VT = GOz u̇
car vO/R = 0
et V T = u̇ ez
(2)
Désignons par R(2) et GD la somme et le moment des actions de contact {T → D} en D. Calculons
la puissance totale des actions de contact dans le référentiel R = Ox y z lié à la tige T , où le calcul
est le plus simple car vD = 0 :
(2)
(2)
Pt = GD · V D/R = GD z (ḟ − u̇)
puisque
VD/T = ( ḟ − u̇) ez
y
y
O
y
T
θ
R
x
D
x
R
D
R
C
φ
D
θ
x
F IG . 20.7.
F IG . 20.8.
III . 3 . — Applications aux liaisons. Liaisons parfaites
a) Définition d’une liaison
On appelle liaison toute relation imposée aux degrés de liberté, c’est-à-dire aux paramètres indépendants qui définissent la position d’un système, et cela indépendamment des lois de la dynamique.
Les liaisons sont réalisées grâce à des forces de contact dont le torseur n’est que partiellement
connu (cf. chapitre 19). Il en résulte que la réduction du nombre de degrés de liberté ne se traduit pas
par une diminution du nombre d’inconnues : au contraire, ce nombre dépasse généralement le nombre
d’équations, auquel cas le problème ne peut être résolu que par l’adjonction d’hypothèses supplémentaires.
b) Liaisons holonomes
Les liaisons les plus importantes sont les liaisons holonomes, c’est-à-dire celles qui se traduisent
par une relation entre les différents degrés de liberté, à l’exclusion de leurs dérivées par rapport au temps.
Exemples :
i) La liaison qui impose à un point A d’évoluer suivant une trajectoire rectiligne Ox est une liaison
holonome : y = 0 z = 0.
ii) De même, le contact permanent d’un disque de rayon R avec un plan (Fig. 20.8) est une liaison
holonome que l’on traduit par y = R, y étant la coordonnée du centre de masse C suivant la verticale
ascendante Oy.
351
Énergétique des systèmes matériels
Remarques : (1) Cette dernière liaison holonome est qualifiée de bilatérale pour la distinguer de la
liaison unilatérale caractérisée par l’inégalité y R (cf. chapitre 9).
(2) Une liaison, qui fait intervenir des dérivées et qui par intégration donne une relation
supplémentaire entre les degrés de liberté, est qualifiée de semi-holonome. Ainsi, dans le
cas du roulement sans glissement du disque précédent sur l’axe Ox, la relation entre les
variables x et u est : ẋ = −Ru̇ ; en intégrant et en supposant que x = 0 si u = 0, on
obtient la relation x = −Ru.
c) Liaison parfaite
Une liaison est parfaite si la puissance totale des actions de contact est nulle. Comme cette puissance est indépendante du référentiel considéré, le caractère parfait d’une liaison est une propriété intrinsèque.
Exemples :
i) Dans le cas de la masselotte glissant sur une tige en rotation uniforme (Fig. 20.5), la liaison est
parfaite si :
Pt = R 2→1 · v1/2 = Rx ẋ = 0 d’où R x = 0 puisque ẋ = 0
ii) Dans le cas de la sphère roulant sans glisser sur un plan incliné (Fig. 20.6), la liaison est parfaite :
Pt = R 2→1 · v1/2 = 0 car v 1/2 = 0
iii) Liaison pivot
Un solide S en rotation autour d’un axe Oz d’un référentiel R réalise une liaison pivot
(Fig. 20.9). Notant [V, v A] le torseur des vitesses de S par rapport à R, en un point A de Oz,
et [R, G A] le torseur des actions de contact au même point, de l’axe sur S, la puissance totale des actions de contact s’écrit :
Pt = POz→S = R · vA + GA · V = GA · V
c Dunod – Toute reproduction non autorisée est un délit
puisque la vitesse des points de l’axe Oz est nulle. Cette liaison est donc parfaite si GA est perpendiculaire à V.
La liaison pivot est parfaite si le moment des actions de contact par rapport à l’axe de rotation est
nul. Nous verrons ultérieurement comment l’on réalise techniquement une telle liaison (cf. chapitre 25).
Sur la figure 20.9b, on a représenté la schématisation normalisée d’une liaison pivot.
S
z
A
O
a)
b)
F IG . 20.9.
iv) Liaison pivot-glissant
Une variation de la liaison pivot est la liaison pivot-glissant. Dans ce cas, S tourne et glisse à la
fois, le long de l’axe (Fig. 20.10a). Comme vA = 0, la puissance totale des actions de contact est :
Pt = R · vA + GA · V
Elle n’est nulle, quel que soit l’état cinématique de S, que si R · v A = 0 et GA · V = 0. La liaison
pivot-glissant est parfaite si, à la fois, GA et R sont perpendiculaires à l’axe de rotation. Sur la figure
20.10b, on a représenté la schématisation normalisée d’une liaison pivot-glissant.
352
20. Énergétique des systèmes matériels
S
z
A
O
b)
a)
F IG . 20.10.
IV . — THÉORÈMES DE L’ÉNERGIE
IV . 1 . — Théorème de l’énergie cinétique
En appliquant le théorème de l’énergie cinétique à chacun des points A d’un système matériel
continu déformable Sd , en mouvement par rapport à un référentiel R (cf. chapitre 5), et en sommant
sur tous ces points, on obtient le théorème de l’énergie cinétique (cf. chapitre 12) :
d Ek
= Pex + P in
dt
Le théorème de l’énergie cinétique s’écrit aussi sous forme différentielle ou intégrale :
d E k = dWex + dWin
et
DE k = Wex + Win
Rappelons que l’énergie cinétique de S d a pour expression, d’après le théorème de Kœnig (cf. chapitre 13) :
1
Ek = MvC2 + Ek∗
2
∗
où Ek est l’énergie cinétique de S d dans le référentiel du centre de masse.
Remarques : (1) Soulignons que, contrairement aux théorèmes de la quantité de mouvement et du moment cinétique, le théorème de l’énergie cinétique fait intervenir les forces intérieures.
Cependant, comme la puissance des forces intérieures est celle d’un torseur nul, elle est
indépendante du référentiel considéré.
(2) Si le référentiel n’est pas galiléen, il faut ajouter la contribution des forces d’inertie
d’entraînement, celle de la force de Coriolis étant nulle.
IV . 2 . — Théorème de l’énergie mécanique
Si on distingue les forces qui dérivent d’une énergie potentielle des autres, la puissance de
ces forces extérieures ou intérieures, dites conservatives, s’écrit, respectivement : −d Ep,ex / d t et
−d Ep,in / d t.
nc
Notant P nc
ex et P in les puissances des autres forces non conservatives extérieures et intérieures, le
théorème de l’énergie cinétique devient :
d
(Ek + E p,ex + Ep,in ) = Pexnc + P nc
in
dt
On obtient alors le théorème de l’énergie mécanique :
d Em
nc
= Pex
+ P innc avec Em = Ek + E p,ex + Ep,in
dt
353
Énergétique des systèmes matériels
On retient souvent ce théorème sous ses formes différentielle et intégrale :
d Em = dWexnc + dW nc
et DE m = Wexnc + Winnc
in
IV . 3 . — Cas d’un seul solide
Dans le cas particulier où le système se réduit à un seul solide S, la puissance des forces intérieures est nulle, Pin = 0, et l’énergie cinétique dans le référentiel du centre du masse R∗ s’exprime
simplement en fonction du vecteur vitesse angulaire V de S par rapport au référentiel d’analyse R.
a) Expression de l’énergie cinétique d’un solide
Deux cas se présentent suivant que le solide S a un point fixe ou non dans le référentiel R.
i) S a un point fixe O dans R. Il vient :
Ek =
1
2
rv2 d
=
1
2
rv · (V × OA) d
=
1
V·
2
OA × rv d
d’où :
Ek =
1
LO · V
2
Si le solide tourne autour d’un axe, avec la vitesse angulaire V = V eu , l’énergie cinétique prend une
forme plus simple. En effet :
1
1
E k = L O · V = V 2(eu · [I]O eu )
2
2
d’où
Ek =
1
IOu V 2
2
I Ou = eu · [I]O eu étant le moment d’inertie de S par rapport à l’axe Ou (cf. chapitre 17).
ii) S n’a pas de point fixe dans R. Il est naturel d’introduire le référentiel du centre de masse
R ∗. Dans ce référentiel, l’énergie cinétique s’écrit :
c Dunod – Toute reproduction non autorisée est un délit
E k∗ =
1
2
v ∗2r d
=
1
2
v∗ · (V × CA) r d
=
1
V·
2
CA × v∗ r d
1
= L ∗C · V
2
puisque v∗ = V × CA. Comme L ∗C = LC , il en résulte, d’après le théorème de Kœnig :
Ek =
1
1
1
MvC2 + LC · V = (P · v C + LC · V)
2
2
2
Si S tourne autour d’un axe, avec la vitesse angulaire V = V eu , on a comme précédemment :
Ek =
1 2
1
MvC + ICu V2
2
2
où I Cu = e u · [I]C eu est le moment d’inertie de S par rapport à l’axe Cu (cf. chapitre 17).
Remarque : La quantité P · vC + L C · V apparaît comme le produit scalaire du torseur des quantités
de mouvement [P, L C] par le torseur cinématique du solide [V, v C].
354
20. Énergétique des systèmes matériels
b) Théorème de l’énergie mécanique pour un seul solide
La puissance des forces intérieures à un seul solide S étant nulle, l’application du théorème de
l’énergie mécanique à S donne :
d Em
= P nc
ex
dt
avec
Em = Ek + E p,ex
soit aussi, sous forme différentielle ou intégrale :
d Em = dWnc
ex
et DEm = Wexnc
Remarque : Si le système déformable Sd est constitué de plusieurs solides, la puissance des forces
intérieures au système se réduit à celle des actions de contact entre les solides qui le
composent. On obtient alors, pour le système :
d Ek
= P ex +
dt
i=j
P in(Si S j )
d’où l’intérêt de rappeler le résultat suivant : la puissance totale des actions intérieures de
contact entre plusieurs solides est nulle lorsqu’il n’y a pas de frottement ou de glissement.
c) Exemple
Considérons un cerceau (masse m, rayon R) roulant et glissant sur un axe incliné d’un angle
a par rapport à un plan horizontal (Fig. 20.11). Le théorème de l’énergie mécanique donne, avec les
notations habituelles :
d Em
= R · v I1
dt
avec
Em = Ek + E p =
1 2 1
mv + I C u̇2 − mg · OC + Cte
2 C 2
et
vI 1 = v C + IC × u̇ ez
En explicitant, on trouve :
Em=
1 2
1
m ẋC + mR2 u̇2 − (−mgx C sin a − mgR) + Cte
2
2
et
R · v I1 = R t (ẋ C + Ru̇)
La résolution d’un tel problème, qui possède deux degrés de liberté (xC , u) et des inconnues supplémentaires telles que Rt , exige que l’on applique aussi les théorèmes du centre de masse et du moment
cinétique. Il convient alors de connaître les conditions initiales et d’étudier la variation de la vitesse de
glissement v g du cerceau sur l’axe (cf. Exercices).
y
C
g
x
O
®
F IG . 20.11.
µ
I
355
Énergétique des systèmes matériels
V . — CONSERVATION DE L’ÉNERGIE MÉCANIQUE
V . 1 . — Caractère non conservatif de l’énergie mécanique
Nous avons vu que l’énergie mécanique d’un système matériel n’était pas une grandeur conservative : dans le bilan de cette grandeur, le travail des forces extérieures traduisait l’échange avec le milieu
extérieur (cf. chapitre 13) et le travail des forces intérieures est un terme de production d’énergie mécanique. Entre deux instants voisins t et t + d t, on a :
d Em = dEm(r) + dEm(c)
avec
dE (mr) = dW (exnc)
et dE (mc) = dW in(nc)
ce qui donne, en intégrant :
(nc)
DEm = Em(r) + Em(c) = Wex(nc) + W (in)
C’est précisément la recherche d’une grandeur énergétique conservative qui a conduit à postuler le
premier principe de la thermodynamique (cf. Thermodynamique).
Bien que non conservative, l’énergie mécanique E m peut se conserver occasionnellement. C’est le
cas si la puissance P(nc) des forces qui ne dérivent pas d’une énergie potentielle est nulle :
P (nc) = 0 entraîne
d Em
=0
dt
d’où
Em = Cte
Comme l’équation différentielle obtenue par application de la conservation de Em est du premier ordre
et non du deuxième, on l’appelle aussi l’intégrale première de l’énergie mécanique.
Remarque : La conservation occasionnelle de l’énergie mécanique est à l’origine du qualificatif
conservatives pour les forces qui dérivent d’une énergie potentielle.
c Dunod – Toute reproduction non autorisée est un délit
V . 2 . — Cas d’un système isolé ou pseudo-isolé
Considérons le cas où les forces extérieures n’ont aucune contribution à la fois dans l’énergie po(nc)
tentielle extérieure Ep,ex et dans la puissance des forces extérieures non conservatives P ex , soit parce
que le système est isolé (les forces extérieures sont inexistantes), soit parce que le système est pseudoisolé (la contribution globale des forces extérieures est nulle). Le théorème de l’énergie mécanique se
réduit alors à :
d Em
= Pin(nc) avec Em = Ek + E p,in
dt
Ainsi, l’énergie mécanique d’un système isolé ou pseudo-isolé ne se conserve pas à moins que la puissance des forces intérieures qui ne dérivent pas d’une énergie potentielle soit nulle.
Il est instructif d’appliquer ce résultat aux cas déjà considérés d’une personne sur un tabouret
d’inertie et d’un œuf cru (cf. chapitre 18). Ces deux systèmes sont déformables et pseudo-isolés, car
la puissance des actions extérieures de contact est pratiquement nulle. L’augmentation de la vitesse de
rotation du tabouret, lorsque la personne ramène ses bras sur l’axe de rotation, est due à la puissance
positive des forces intérieures ; en effet, on a, l’énergie potentielle de pesanteur ne variant ainsi que la
projection sur l’axe du moment cinétique Lz = I i Vi = I f Vf (cf. chapitre 18) :
DEm = DEk = DEk = W (innc)
avec
DEk =
If V2f
Ii V 2i
= I i Vi (Vf − Vi ) > 0
−
2
2
Quant à la diminution de la vitesse de rotation de l’œuf cru, elle est due à la puissance négative des
forces intérieures de viscosité (cf. chapitre 31).
356
20. Énergétique des systèmes matériels
V . 3 . — Exemples
a) Système articulé tige-roue
Considérons le système articulé tige-roue représenté sur la figure 20.12. Si la liaison pivot en O 1
est parfaite et si la roue roule sans glisser sur le plan horizontal Oxy, la puissance des forces extérieures
de contact est nulle. Le système est donc pseudo-isolé. Son énergie mécanique se conserve à condition
que la puissance totale des actions de contact au niveau de l’articulation en C soit nulle, c’est-à-dire
que la liaison en C soit parfaite. Notons que, dans ce mouvement horizontal, l’énergie potentielle de
pesanteur reste constante.
z
O1 Tige
g
C Roue y
O
x
F IG . 20.12.
b) Exemple simple d’une bifurcation
Le régulateur à boules présente un intérêt à la fois pratique, pédagogique et scientifique. On connaît
son rôle majeur dans la maîtrise du fonctionnement des machines à vapeur au XIX e siècle.
On peut le schématiser par un système constitué de tiges articulées, de masse négligeable, de deux
masselottes identiques A et B, de même masse m et d’une troisième masselotte D de masse 2m
(Fig. 20.13). L’ensemble déformable, caractérisé par l’angle u variable que font les tiges avec l’axe de
rotation, peut tourner symétriquement et de façon parfaite autour d’un axe vertical ascendant Oz.
Un moteur, exerçant un moment d’action G m ez, lui impose une vitesse angulaire uniforme V.
O
z
θ
B (m)
l
l
A (m)
D(2 m)
Poulie
g
Manivelle
F IG . 20.13.
Dans le référentiel tournant
non galiléen, la puissance des forces non conservatives qu’exerce
le moteur est nulle puisque P (nc) = Gm · V avec V = 0. On a donc, dans ce référentiel non galiléen,
conservation de l’énergie mécanique : Em = Cte.
Dans R , l’énergie cinétique du système a pour expression :
1
1
1
1
1
E k/R = mv2A + mv2B + (2m)v2D = 2 × m(2lu̇)2 + (2m)(2lu̇ sin u) 2 = 4ml2 u̇2 (1 + sin2 u)
2
2
2
2
2
puisque OA = OB = 2l et OD = 2l cos u.
L’énergie potentielle a deux contributions, l’énergie potentielle de pesanteur E pg et l’énergie potentielle d’inertie centrifuge Epc :
R ,
Epg = mgzA + mgz B + 2mzD + Cte = −8mgl cos u + Cte = 8mgl(1 − cos u)
357
Énergétique des systèmes matériels
car z A = z B = zD = −2l cos u , et
E pc = −IOz
V2
V2
+ Cte = − 2 × m(2l sin u) 2
+ Cte = −4mV 2l2 sin2 u
2
2
si l’origine de l’énergie potentielle totale est prise pour u = 0 et si le moment d’inertie de la masse en
D est nul. Ainsi :
V2
Ep = 8mgl 1 − cos u −
sin 2 u
2g/l
Il en résulte que l’énergie mécanique totale E m dans R a pour expression, en posant v 0 = (g/l)1/2
et u = V/v0 :
Em = Ek + E p = 4ml2u̇2 (1 + sin2 u) + 8mgl 1 − cos u −
u2
sin 2 u
2
= Cte
Étudions, à l’aide de Ep (u), les différentes positions d’équilibre stable de ce système dans le
référentiel tournant R ; la fonction E p(u) que l’on obtient en ajoutant les deux contributions E pg et
E pc est paire (Fig. 20.14a).
Les positions d’équilibre sont définies par l’équation :
d E p
= 8mgl sin u 1 − u 2 cos u = 0
du
d’où les solutions u 1 = 0, u 2 = p et u3 tel que cos u 3 = 1/u 2. Ces positions d’équilibre sont stables
si la dérivée seconde est positive :
K=
d2 E p
d u2
e
= 8mgl cos u(1 − u2 cos u) + u2 sin 2 u
e
On a donc :
(K ) 0 = 8mgl(1 − u 2)
(K)p = −8mgl(1 + u 2)
et (K ) u3 = 8mglu2 (1 − 1/u4 )
Il existe ainsi une position d’équilibre instable ( u 2 = p ) et deux positions d’équilibre stable :
c Dunod – Toute reproduction non autorisée est un délit
i) l’une u 1 = 0 pour V < v0,
ii) l’autre u 3 = ±arcos(1/u 2) pour V > v0. Le graphe donnant E p en fonction de u, pour
V > v0 conforte cette l’analyse. On voit que, si V v0 , u3 ≈ p/2.
E p Énergies
¼
2
2ml
Em
Epg
Ep
0
¼
µ1
0
Epc
a)
µe
B
!0
Ω
µ
−
¼
2
b)
F IG . 20.14.
358
20. Énergétique des systèmes matériels
Si l’on représente graphiquement la position d’équilibre stable en fonction de V, on obtient le
graphe de la figure 20.14b : tant que V < v 0, la position d’équilibre est ue = 0 ; dès que V > v0 ,
la position d’équilibre prend une valeur non nulle qui varie avec V jusqu’à la valeur p/2 lorsque
V devient très grand par rapport à v0 . Au point B de la courbe, défini par V = v0, se produit un
changement qualitatif de la position d’équilibre sous l’action du paramètre extérieur V ; on dit que le
système subit en ce point une bifurcation.
Ordre de grandeur : Si l = 5 cm, v0 = (9, 81/0, 05) 1/2 ≈ 14 rad . s −1 soit 2, 2 tours par
seconde. Une telle vitesse critique peut être aisément mise en évidence.
Comme on l’a déjà vu pour le mouvement d’un point matériel, la conservation de l’énergie mécanique permet, dans le cas d’un mouvement unidimensionnel, de procéder à une étude qualitative qui
est précieuse si l’équation différentielle n’est pas simple à résoudre. L’énergie cinétique étant non négative, les seuls mouvements possibles sont ceux pour lesquels l’énergie mécanique est supérieure à
l’énergie potentielle.
Remarque : On pourrait être tenté d’établir ce résultat à partir de l’énergie dans le référentiel terrestre
R. Cependant, dans ce référentiel, l’énergie mécanique n’est pas une constante puisque
sa variation est égale au travail du moment Gm exercé par le moteur, lequel n’est pas nul.
Pour parvenir à l’équation du mouvement, il est nécessaire d’exprimer au préalable ce
moment à l’aide du théorème du moment cinétique en projection suivant l’axe de rotation.
CONCLUSION
Retenons les points essentiels de l’énergétique des systèmes.
(1) Le théorème de l’énergie cinétique, contrairement aux théorèmes du centre de masse et du
moment cinétique, contient aussi la contribution des forces intérieures.
(2) Ce théorème fait intervenir des grandeurs mécaniques scalaires ; il est donc commode d’emploi, mais en contrepartie il ne fournit qu’une seule équation, ce qui le destine préférentiellement aux
mouvements unidimensionnels.
(3) La manière la plus efficace de l’utiliser consiste à séparer les forces qui dérivent d’une énergie
potentielle des autres et à l’écrire sous la forme :
d Em
= P ex(nc) + P in(nc)
dt
(nc)
soit aussi
DEm = Wex(nc) + W in(nc)
(nc)
où Em est l’énergie mécanique, Pex et P in les puissances des forces extérieures et intérieures qui
(nc)
(nc)
ne dépendent pas d’une énergie potentielle ; Wex et Win sont les travaux correspondants.
(4) Dans le cas important d’un seul solide, W in = 0 et l’énergie cinétique s’exprime simplement
en fonction du vecteur vitesse de rotation.
(nc)
(nc)
(5) Si W (nc) = Wex + Win = 0, ce qui est fréquent, ce théorème fournit alors une intégrale
première qui traduit la conservation de l’énergie mécanique : E m = E k +Ep = Cte. L’intérêt que présente
a priori cette intégrale première de l’énergie, en tant qu’équation différentielle du premier ordre, est
limité par son caractère quadratique difficilement exploitable. En revanche, son intérêt physique est de
tout premier plan. Écrit sous la forme d’une grandeur scalaire qui se conserve, le théorème de l’énergie
mécanique permet non seulement une résolution rapide de problèmes à une dimension, mais aussi et
surtout une introduction de l’un des concepts les plus fondamentaux de la physique, l’énergie.
359
Énergétique des systèmes matériels
EXERCICES ET PROBLÈMES
P20– 1. Oscillations d’un volant roulant sans glisser sur un guide circulaire
Un volant repose par deux tourillons sur un guide circulaire (Fig. 20.15). Ce volant, parfaitement
équilibré, a son centre de masse situé sur son axe de révolution. On utilise les angles u et f pour
caractériser la position du volant dans le plan vertical Oxy du référentiel terrestre R = Oxyz. On
désigne par I le moment d’inertie du volant par rapport à son axe de révolution, R le rayon du guide
et r le rayon des tourillons.
1. Établir la condition de roulement sans glissement du volant sur son guide.
2. Trouver l’équation différentielle du mouvement en u.
3. En déduire la période des petites oscillations.
4. Retrouver l’équation différentielle, établie en 2 . , à l’aide du théorème du moment cinétique
appliquée au point de contact.
O
g
R
y
θ
C
r
O
Δ
g
l
µ
f
x
V
C
x
F IG . 20.15.
F IG . 20.16.
P20– 2. Pendule composé formé d’une tige et d’un disque articulés
Un système articulé est constitué d’une tige homogène, de masse m, de longueur l, et d’un disque
homogène, de masse M et de rayon r (Fig. 20.16). Ce système, suspendu à un axe horizontal D, est
abandonné avec un angle u 0 et une vitesse de rotation du disque V 0. Les liaisons pivot en O et au
centre C du disque sont parfaites.
c Dunod – Toute reproduction non autorisée est un délit
1. Trouver deux constantes du mouvement.
2. Quelle est la période des petites oscillations du pendule pesant ainsi formé ? Comparer cette
période à celle du pendule constitué par la tige et le disque rigidement liés.
P20– 3. Conservation de l’énergie d’un cerceau lesté
Retrouver, par la conservation de l’énergie, l’équation différentielle du mouvement du cerceau lesté
représenté sur la figure 18.12. Discuter la nature des différents mouvements.
P20– 4. Système articulé de deux barres
Deux barres homogènes, identiques (masse m, longueur l) sont articulées l’une sur l’autre sans
frottement et reposent sur un plan horizontal parfaitement lisse. On les maintient dans un plan vertical
dans la position indiquée sur la figure 20.17 et on les abandonne. Les extrémités B et C glissent sans
frottement et les barres tombent en restant dans le plan vertical initial.
1. Quelle est l’expression de l’énergie cinétique du système en fonction de l’angle u = (Ox, OC 1) ?
360
20. Énergétique des systèmes matériels
2. Établir l’équation différentielle en u.
3. Calculer, en fonction de la hauteur h, la vitesse de l’articulation A au moment où elle arrive en
contact avec le plan horizontal.
y
z
A
g
C1
h
B
O
θ
g
C
Ω
∆ O
y
θ C
x
F IG . 20.17.
F IG . 20.18.
P20– 5. Mouvement d’une plaque homogène de forme carrée
Le référentiel terrestre R est considéré comme galiléen. Soit R = Ox y z un trièdre orthonormé,
O étant un point fixe de R et Oz la verticale ascendante ; le champ de pesanteur uniforme est noté :
g = −g ez .
Une plaque homogène plane ayant la forme d’un carré C, de côté 2a, de masse m, de centre de
masse C, est mobile autour d’un axe matériel D confondu avec Ox de telle sorte que C soit astreint
à se déplacer dans le plan Oy z, un de ses sommets restant fixé en O. La position de C à tout instant
est repérée par l’angle u = (g, OC) (Fig. 20.18).
L’axe D est mis en rotation autour de la verticale par un moteur qui lui impose un vecteur rotation
constant V = V ez. On se propose d’étudier le mouvement de C par rapport au référentiel R . La
liaison est parfaite en O.
1. Exprimer, en fonction de u̇, l’énergie cinétique Ek de C dans R .
2. Donner, en fonction de u, l’expression de l’énergie potentielle de pesanteur E pg de C.
3. Quelle est l’énergie potentielle centrifuge E pc
en fonction de V et u ?
4. Calculer l’angle u e qui correspond à une position d’équilibre stable de C par rapport à R .
Montrer que u e n’est différent de 0 que si V est supérieur à une valeur v c que l’on déterminera en
fonction de g et a. Quelle valeur faut-il donner à V pour avoir ue = 60◦ ?
P20– 6. Pendule elliptique
Le pendule elliptique est un pendule pesant, dont l’axe de l’articulation O 1z est lié à un petit véhicule de masse négligeable (Fig. 20.19). Ce dernier peut se déplacer sans frottement suivant l’axe horizontal Ox d’un référentiel terrestre R = Oxyz dans lequel Oy est la verticale ascendante. Toutes
les liaisons entre solides, par l’intermédiaire du véhicule et de roulements à billes au niveau de l’articulation, sont parfaites. Initialement, le pendule est écarté de la verticale et abandonné sans vitesse
initiale.
1. Montrer que le centre de masse C du système, situé à une distance l de O 1, évolue le long
d’une droite fixe.
2. Établir l’équation différentielle du mouvement en u = (−Oy 1 , O1 C) en appliquant le théorème
de l’énergie dans R. On désigne par I le moment d’inertie du pendule par rapport à l’axe O 1z.
3. Trouver la période des petits mouvements d’oscillation.
4. Quelle est la trajectoire d’un point de l’axe du pendule ?
361
Énergétique des systèmes matériels
y
y1
g
Oz
x
O 1z
z
.
θ
g
x1
Roue .
φ
Disque
θ
O
l
C
I
A
F IG . 20.19.
F IG . 20.20.
P20– 7. Mise en rotation d’un disque par la chute d’une masse
Un disque est mis en rotation par la chute verticale d’une masselotte A (masse m), grâce à un
système intermédiaire constitué d’une roue (rayon b) solidaire d’une tige (section circulaire de rayon
r) matérialisant son axe (Fig. 20.20). En tombant, la masse tire sur un fil initialement enroulé sur la
tige ; la rotation de la tige entraîne celle de la roue qui roule sans glisser sur le disque en un point situé à
une distance l de l’axe de rotation Oz. On désigne par I1 et I2 les moments d’inertie du disque et du
dispositif intermédiaire par rapport à leurs axes respectifs.
1. Exprimer les conditions de roulement sans glissement de la roue sur le disque et du fil sur la tige.
En déduire que le système n’a qu’un degré de liberté.
2. Sachant que toutes les liaisons sont parfaites, établir l’équation différentielle à laquelle satisfait
l’angle u qui caractérise la rotation du disque. En déduire la nature du mouvement.
P20– 8. Étude de la chute d’une barre par l’énergie
Retrouver, à l’aide de l’énergie, l’équation différentielle du mouvement de la barre représentée sur
la figure 18.15.
c Dunod – Toute reproduction non autorisée est un délit
P20– 9. Cylindre sur un véhicule accéléré
Un cylindre plein, homogène (masse m, rayon r) est placé sur la plateforme d’un véhicule
(Fig. 20.21). Le cylindre étant immobile,le véhicule part du repos et prend une accélération a 0 constante
selon l’axe horizontal Ox. Il roule sans glisser sur la longueur l de la plateforme avant d’atteindre un
obstacle. En appliquant le théorème de l’énergie dans le référentiel du véhicule, trouver la distance L
parcourue par ce dernier, lorsque le cylindre a atteint l’obstacle.
z
g
Moteur
z
Ω
θ
O
x
z1
B
y
C
x
F IG . 20.21.
F IG . 20.22.
362
20. Énergétique des systèmes matériels
P20– 10. Mouvement d’un secteur circulaire dans un référentiel tournant
Un secteur circulaire plein homogène, de masse M, de rayon R et de demi-angle a, est relié verticalement à une tige horizontale OB à l’aide d’une articulation pivot au centre B du disque générateur
(Fig. 20.22). La tige, de longueur b et de masse négligeable, tourne uniformément, avec une vitesse angulaire V autour de l’axe vertical Oz d’un référentiel terrestre R = Oxyz. Les liaisons en O et B
sont parfaites. On désigne par c la distance de B au centre de masse C.
1. Trouver la position du centre de masse du secteur circulaire.
2. Calculer les moments principaux d’inertie I 3 , I1 et I2 respectivement par rapport aux axes Bz 1 ,
axe de symétrie, Bx1, perpendiculaire au plan du secteur et By 1 qui forme, avec les deux premiers axes,
un trièdre orthonormé direct Bx1y1 z1. En déduire l’expression de l’énergie cinétique du système, dans
le référentiel tournant R = Ox y z lié à la tige, en fonction de l’angle u que l’axe de symétrie du
secteur fait avec la verticale ascendante.
3. Quelle est, en fonction de u, l’énergie potentielle de pesanteur ? Montrer qu’il est nécessaire
d’introduire une autre énergie potentielle d’expression :
V2
Ml 2 + I3 + (I 2 − I3 ) sin 2 u
2
4. En déduire l’équation différentielle du mouvement. Étudier les petits mouvements dans le cas
d’un disque, d’un demi-disque et d’un quart de disque.
Ep,c = −
P20– 11. Bille sphérique creuse dans un guide diédrique en rotation
Une bille sphérique creuse (masse m, rayon r) roule sans glisser sur un rail circulaire à section
droite en forme de dièdre droit (Fig. 20.23a). La trajectoire de son centre de masse par rapport au rail
est un cercle de rayon R. Le rail tourne uniformément autour d’un axe vertical avec la vitesse angulaire
Vr par rapport au référentiel terrestre R = Oxyz supposé galiléen, Oz étant la verticale ascendante
(Fig. 20.23b).
1. Montrer que, dans le référentiel R = Oxyz lié au rail, la vitesse√v C du centre de masse de
la bille est reliée à sa vitesse de rotation V par l’équation : vC = rV 2/2. En déduire l’énergie
cinétique de la bille dans R .
2. Établir les expressions de l’énergie potentielle de pesanteur et de l’énergie potentielle centrifuge dans le référentiel tournant R . En déduire l’énergie mécanique E m dans R et l’équation du
mouvement en u.
3. Discuter les positions d’équilibre possibles de la bille en fonction de V.
4. Établir les expressions de l’énergie cinétique de la bille par rapport à R, de l’énergie potentielle de pesanteur. En déduire l’énergie mécanique Em. Cette énergie mécanique ne se conserve pas.
Pourquoi ?
z
V
Bille
C
R
ω
J
Rail
I
q
a)
b)
F IG . 20.23.
g
363
Énergétique des systèmes matériels
P20– 12. Machine d’Atwood dansante (MAD)
Le système mécanique représenté sur la figure 20.24a est une variante complexe de la machine
d’Atwood historique, conçue par le physicien anglais G. Atwood en 1784 (Fig. 20.24b). Les masses de
A et B , qu’on assimile à des corps ponctuels, sont respectivement m et M . Les poulies identiques ont
pour rayon R et pour moment d’inertie par rapport à leur axe de révolution I p . La liaison verrou entre
les poulies et leurs axes respectifs de rotation est parfaite. En outre, la distance D qui sépare les axes
des poulies est constante.
Le fil reliant les deux masses est inextensible et il ne glisse pas dans la gorge des poulies. On
désigne par z la coordonnée fixant la position de B , selon la verticale descendante Oz , à partir du
plan horizontal passant par O , et par u l’angle que fait la direction du pendule IA avec la verticale
descendante (Fig. 20.24a). L’angle de rotation de la poulie est w .
I
w
Ox
y
y
O
D
Poulie 1
r
g
g
u
zA
A(M)
z
B(M)
a)
A(M)
z
B(M)
b)
F IG . 20.24.
1. Machine d’Atwood historique à deux poulies
Les mouvements des masselottes A et B sont rectilignes, selon la verticale (Fig. 20.24b).
c Dunod – Toute reproduction non autorisée est un délit
a) Établir, en fonction de z et w , la condition de roulement sans glissement de la poulie sur le fil.
Exprimer, en fonction de z et de la coordonnée zA de A , l’inextensibilité du fil. En déduire le nombre
de degrés de liberté du système.
b) Établir, en fonction de z ou ż , les expressions de l’énergie potentielle et de l’énergie cinétique
du système.
c) Que signifie l’expression « La liaison entre les poulies et leurs axes respectifs de rotation est
parfaite » ? Que peut-on dire de la puissance des forces de frottement de contact qu’exercent les poulies
sur le fil ? En déduire, à partir du théorème de l’énergie, l’équation du mouvement et la nature de ce
dernier.
d) Quel est l’intérêt pédagogique de cette machine ?
e) Calculer l’accélération du mouvement pour m = 120 g , M = 360 g , I p = 7 × 10−6 kg.m2 et
R = 2, 5 cm .
2. Machine d’Atwood Dansante MAD ou SAM (Swinging Atwood Machine)
Comme précédemment, la masselotte B a un mouvement rectiligne vertical, mais A peut aussi
osciller (Fig. 20.24a).
a) Justifier l’existence de deux poulies et non d’une seule comme dans l’expérience historique
d’Atwood.
b) Donner, en fonction de z et w , la condition de roulement sans glissement de la poulie sur le fil.
Exprimer l’intextensibilité du fil en fonction de z , u et r = IA . En déduire le nombre de degrés de
364
20. Énergétique des systèmes matériels
liberté du système. Pourquoi l’application du théorème de l’énergie mécanique ne suffit-elle pas pour
analyser le mouvement ?
c) Établir, en fonction de r , u , ṙ et u̇ , les expressions de l’énergie potentielle et de l’énergie
cinétique du système.
d) En déduire l’équation suivante, issue de l’application du théorème de l’énergie :
1
1
M t (ṙ − Ru̇) 2 + mr2 u̇2 + mg(R sin u − r cos u) + Mg(r − Ru) = Cte
2
2
dans laquelle Mt est un coefficient que l’on exprimera en fonction de M , m , I p et R .
e) Quel est l’intérêt d’appliquer le théorème du moment cinétique à la masselotte A , au point
mobile I de contact du fil avec la poulie 1 ? Déduire de ce théorème la seconde équation du mouvement :
rü + 2 ṙ u̇ − Rṙ u̇ = −g sin u
f) Retrouver l’équation du mouvement de la machine d’Atwood historique.
P20– 13. Pendule pesant inversé sur un chariot en mouvement
Un pendule O A est constitué d’une tige de masse négligeable et de longueur l . Son extrémité
A porte une masselotte de masse m et son extrémité O est articulée sur un véhicule (masse M ) en
mouvement rectiligne horizontal sans frottement, selon l’axe Ox du référentiel du laboratoire R . Ce
dernier est soumis à la force de propulsion horizontale Fp = F p ex . On désigne par Oz la verticale
ascendante et par u l’angle que fait la direction du pendule avec la verticale (Fig. 20.25). En outre, R
est la force qu’exerce le véhicule sur le pendule, et R la force verticale qu’exerce le rail sur le véhicule.
La liaison étant supposée parfaite, le moment des actions de contact en O est normal à l’axe de rotation
O y .
1. Appliquer le théorème du centre de masse C au véhicule en mouvement dans le plan vertical
Ozx . En déduire deux équations auxquelles satisfont la coordonnée x de C et les composantes des
réactions R et R , respectivement X , Z et X , Z .
2. Établir les deux équations différentielles issues du théorème du centre de masse appliqué au
pendule.
3. Trouver l’équation différentielle issue de l’application du théorème du moment cinétique appliqué au point mobile O de R . Que devient-elle dans le cas des petis mouvements ?
4. En déduire ẍ et ü en fonction de x u et F p .
5. On pose q1 = x , p 1 = M ẋ , q2 = lu , p2 = Mlu̇ . Exprimer la matrice de transformation
donnant la matrice colonne dérivée par rapport au temps de la matrice colonne formée par q 1 , p1 , q2 ,
p 2. Calculer cette matrice pour l = 0, 4 m , m = 0, 1 kg et M = 0, 3 kg .
z
u
g
A
O0y
Fp
C
O
x
F IG . 20.25.
21
Mécanique des chocs
L’étude des chocs entre solides, ou plus largement entre systèmes quelconques, relève des théorèmes généraux de la mécanique, tout comme celle des collisions de particules que nous avons vue au
chapitre 14. Cependant, en raison des caractéristiques des chocs, les théorèmes généraux prennent une
forme simplifiée, techniquement très commode d’emploi et fondamentalement liée aux bilans de quantité de mouvement, de moment cinétique et d’énergie cinétique.
I . — DYNAMIQUE DES CHOCS
c Dunod – Toute reproduction non autorisée est un délit
I . 1 . — Définition des chocs
On appelle choc entre deux solides le contact de leurs surfaces, à un instant t, alors que ces surfaces
n’étaient pas en contact dans les instants voisins antérieur et parfois postérieur à cette date.
L’expérience courante montre que la durée d’un choc est toujours très faible devant les durées caractéristiques qui interviennent dans l’analyse. Il en résulte que le choc est localisé dans l’espace : par
exemple, si on lance une boule de billard sur une seconde boule immobile, le choc ne commence que
lorsque les deux boules entrent en contact et cesse dès la fin du contact ; en dehors de cette période, les
mouvements des boules sont des mouvements classiques de solides soumis à des forces bien répertoriées : poids, réaction du tapis, résistance de l’air.
En outre, les variations de vitesse sont fortes car les solides exercent entre eux des forces de réaction
importantes lorsqu’on tente de les comprimer : aux vitesses de pénétration avant le choc succèdent des
vitesses d’expulsion après le choc.
I . 2 . — Bilans de quantité de mouvement et de moment cinétique
Rappelons les équations-bilans de la quantité de mouvement et du moment cinétique d’un système
matériel (cf. chapitres 13 et 18) :
DP = P(r) =
Fex d t
et DL O = L(Or) =
MO,ex d t
Ces bilans de grandeurs conservatives, appliqués aux chocs, caractérisés par une très faible durée, font
apparaître naturellement les termes d’échange particuliers appelés respectivement percussion et moment
de percussion :
P
(r)
t2
=
t1
F ex d t
et
(r)
LO
t2
=
t1
MO,ex d t
366
21. Mécanique des chocs
Notons que, si la force et le moment sont des grandeurs finies, c’est-à-dire si les normes de F et M O
sont limitées par des valeurs majorantes, les termes d’échange correspondants sont négligeables. En
effet, remplaçant par exemple la norme de Fex par une valeur majorante Fm , on obtient :
t2
t1
F ex d t < Fm
t2
t1
d t = Fm t ≈ 0
puisque t est très faible. C’est le cas de la plupart des forces, telles que le poids, à l’exclusion des
forces de réaction entre solides.
Retenons donc l’expression des théorèmes relatifs aux chocs :
t2
DP = P(r) =
t1
Fex d t
et DL O = L(Or) =
t2
t1
M O,ex d t
Dans le cas où il n’y a pas d’échange avec le milieu extérieur (système isolé ou pseudo-isolé), la quantité
de mouvement et le moment cinétique se conservent :
P = Cte
et
LO = Cte
soit, en indiçant par i les grandeurs initiales et par f les grandeurs finales :
P i = Pf
et
LO,i = LO,f
Notons que la condition d’isolement du système est ici peu restrictive, puisque seules les percussions
associées aux forces de réaction ne sont pas négligeables. De même, la condition d’application du théorème du moment cinétique en un point fixe n’est plus impérative car les déplacements sont négligeables
au cours d’un choc : le point où l’on calcule le moment cinétique pourra donc être quelconque.
I . 3 . — Exemples
a) Désintégration d’un système isolé
Considérons un système constitué de deux cylindres aplatis, de masses respectives m 1 et m2 ,
reliés par un ressort ; ce dernier est comprimé grâce à un fil (Fig. 21.1). Cet ensemble évolue sans
frottement sur une table à coussin d’air horizontale. La réaction de contact étant à chaque instant opposée
au poids, le système est pseudo-isolé. Si l’on brûle le fil, le mouvement ultérieur de l’ensemble satisfait
à l’équation de conservation suivante puisque l’échange est nul :
p = p 1 + p2
soit
(m 1 + m2)v = m 1v1 + m2v2
b) Pendule balistique
Une tige homogène, de longueur l et de masse M, peut tourner parfaitement autour d’un axe fixe
horizontal qui passe par l’une de ses extrémités O (Fig. 21.2).
Un corps ponctuel A (masse m), de vitesse v, vient s’y fixer à une distance b de O, alors que
la tige était au repos en position verticale. Écrivons pour l’ensemble le bilan de moment cinétique en O,
en projection suivant l’axe de rotation. Il vient, le moment des actions de contact étant perpendiculaire
à l’axe de rotation :
DLOz = 0 soit 0 + mv b = (I + mb2 )Vf
où I = Ml 2/3 est le moment d’inertie de la tige par rapport à l’axe Oz et V f la vitesse de rotation
de la tige dans l’état final, après le choc. On en déduit la vitesse v en déterminant V f , laquelle est la
vitesse angulaire initiale dans le mouvement pendulaire ultérieur.
367
Mécanique des chocs
O
g
p1
p
θm
b
C
Fil
v
p2
F IG . 21.1.
A
F IG . 21.2.
En effet, le mouvement ultérieur du système satisfait à la conservation de l’énergie mécanique. Si
u m est l’angle maximal dont s’écarte la tige de la verticale, on a :
Em = E k + Ep = Cte
d’où
l
1
(I + mb2 )V2f + −Mg − mgb
2
2
l
= 0 + −Mg − mgb cos um
2
Il en résulte que :
v=
I + mb 2
Vf
mb
avec
Vf =
2g(Ml/2 + mb)(1 − cos u m)
I + mb 2
1/2
Notons que la quantité de mouvement de l’ensemble ne se conserve pas, puisque l’échange n’est
pas nul. L’application du théorème de la quantité de mouvement permet précisément d’obtenir cet
échange :
l
l
P (r) = M + mb Vf ex − (mv + 0) = M + mb Vf − mv ex
2
2
II . — ÉNERGÉTIQUE DES CHOCS
c Dunod – Toute reproduction non autorisée est un délit
II . 1 . — Théorème de l’énergie cinétique
Appliquons le théorème de l’énergie cinétique au système qui subit un choc, entre les instants
voisins t1 et t 2 = t 1 + t. Il vient :
DEk = W ex + W in
Dans la liste de ces travaux, le travail des forces finies est négligeable puisque les déplacements le sont
au cours d’un choc.
Notons que W ex est nul si le système n’est soumis qu’à des forces extérieures finies. En ce qui
concerne le travail des forces de contact, il est généralement négatif car, même si les forces de frottement
sont nulles, le système subit une déformation locale et donc consomme une partie de l’énergie cinétique.
Ainsi, la diminution d’énergie cinétique d’un système, au cours d’un choc, n’est pas uniquement liée
aux forces de frottement ; une partie sert à le déformer.
Dans le cas où le système est isolé ou pseudo-isolé, on a :
DEk = W in 0
368
21. Mécanique des chocs
II . 2 . — Choc élastique et choc inélastique
a) Définitions
On dit qu’un choc entre deux systèmes, formant un ensemble isolé ou pseudo-isolé, est élastique
si l’énergie cinétique totale du système est conservée :
Ek,i = E k,f
soit
DE k = Ek,f − E k,i = 0
Dans tous les autres cas, le choc est inélastique : l’énergie cinétique perdue permet de modifier la
nature des systèmes en les déformant, en les brisant en morceaux ou en augmentant leur température.
On dit, en thermodynamique, que l’énergie interne ou que l’état interne des systèmes en interaction
a changé (cf. Thermodynamique). Cette définition des chocs élastiques est compatible avec celle que
l’on donne généralement dans les collisions entre particules, notamment en relativité (cf. chapitre 14 et
Relativité et invariance).
b) Facteur de restitution en énergie cinétique
Il est naturel de caractériser un choc inélastique par le facteur de restitution en énergie, c’est-à-dire
le rapport entre l’énergie cinétique finale E k,f du système et son énergie cinétique initiale E k,i :
εe =
E k,f
E k,i
avec
0 εe 1
La limite supérieure ε e = 1 correspond à un choc élastique (Ek,f = Ek,i), alors que la limite inférieure εe = 0 traduit la disparition totale de l’énergie cinétique disponible ; un tel choc est parfaitement
inélastique.
Les balles « superélastiques » des enfants ont un facteur ε e proche de l’unité. On peut mesurer ce
facteur en comparant la hauteur hf atteinte par une telle balle que l’on l’abandonne d’une hauteur h i
et qui subit un choc au contact du sol (Fig. 21.3a). L’énergie cinétique de la balle, avant le choc, est
mvi2/2 = mgh i, en raison du théorème de l’énergie mécanique appliqué à la balle dans son mouvement
antérieur. Son énergie cinétique, après le choc, est mv2f /2 = mgh f , d’après le théorème de l’énergie
mécanique appliqué à la balle dans son mouvement ultérieur. Il en résulte que :
εe =
v2f
v2i
=
hf
hi
Par exemple, en laissant tomber une balle « superélastique » d’une hauteur h i = 150 cm, on a
trouvé hf = 118 cm. On en déduit : ε e = 0, 78 ≈ 0, 8.
v1 − v 2
v 1 − v 2
S1
h
h
S2
a)
b)
F IG . 21.3.
369
Mécanique des chocs
c) Facteur de restitution en composante normale de la vitesse relative
On utilise encore le facteur de restitution en composante normale de la vitesse relative, introduit par
Newton (Fig. 21.3b). C’est le rapport εn des composantes normales (au plan tangent des deux systèmes
en contact) de la différence des vitesses des points qui entrent en contact après et avant le choc :
εn = −
(vf ,1 − v f ,2) · e n
(vi,1 − v i,2) · e n
en étant le vecteur unitaire normal aux surfaces en contact.
Dans l’exemple précédent
facteurs de restitution ε e et ε n
vf ,1
εn = −
vi,1
où la vitesse du sol est nulle, on a la relation suivante entre les deux
:
hf 1/2
v
· en
d’où εn = f ,1 =
= ε1e /2 = 0, 88
hi
vf ,1
· en
III . — APPLICATIONS
III . 1 . — Choc élastique de deux boules de billard
Écrivons les théorèmes de la mécanique des chocs pour un système de deux boules identiques,
telles que des boules de billard évoluant dans un plan horizontal (Fig. 21.4a). Si l’on néglige l’influence
des forces extérieures de frottement et la déformation des solides, on a :
c Dunod – Toute reproduction non autorisée est un délit
DP = 0
et DEk = 0
ce qui donne, en supposant la deuxième boule initialement immobile et en primant les grandeurs après
le choc :
p21
p 2
p 2
= 1 + 2
p 1 = p1 + p2 et
2m
2m 2m
La simplification par la masse commune m donne deux équations qui montrent que les directions des
boules, après le choc, sont orthogonales (Fig. 21.4b). En outre, le contact se faisant sans frottement,
les échanges de quantité de mouvement par le contact sont des vecteurs qui passent par le centre de
masse des boules ; le moment cinétique de chaque boule se conserve donc et par conséquent la vitesse
angulaire aussi :
V 1 = V1 et V 2 = V 2
p1
p1
p1
a)
b)
p2
F IG . 21.4.
III . 2 . — Choc inélastique de deux solides de masses différentes
Un solide, de masse m 1, tombe, avec une vitesse de translation v 1 , sur un second solide initialement immobile, de masse m2 (Fig. 21.5). Supposons que les deux masses aient même vitesse v f
après la collision et que l’échange de quantité de mouvement entre elles soit dirigé suivant la droite qui
joint les deux centres de masse. Cette dernière hypothèse facilite l’étude de la rotation de chaque so-
370
21. Mécanique des chocs
lide puisque, l’échange de moment cinétique entre les solides étant nul, ces derniers gardent leur mouvement de rotation après le choc.
La conservation de la quantité de mouvement de l’ensemble donne :
m1v1 = (m 1 + m 2)vf
d’où le facteur de restitution en énergie :
(m1 + m2)v 2f /2
E k,f
v
m1
=
= f =
2
m 1 v 1/2
m 1 + m2
E k,i
v1
Deux cas méritent d’être étudiés :
εe =
i) m 2 m1 . Le facteur ε e ≈ 1 ; il n’y a pratiquement pas d’énergie cinétique perdue. C’est le cas
lorsqu’on souhaite que toute l’énergie cinétique soit utilisée pour mettre en mouvement la cible : ainsi,
pour enfoncer un clou (masse m2) avec un marteau (masse m 1 ) on utilise un marteau lourd.
ii) m 2 m 1 . Le facteur εe ≈ 0. La grande variation d’énergie cinétique est utilisée pour modifier
l’état de la cible. Ce cas modélise le fonctionnement du marteau léger qu’utilisent les cantonniers pour
briser des cailloux.
C1
θ1
C
C2
I
F IG . 21.5.
F IG . 21.6.
III . 3 . — Choc élastique et sans frottement d’une boule sur un plan fixe
Une boule (masse m 1, rayon r) heurte un plan fixe avec une vitesse v1 de son centre de masse et
une vitesse angulaire V1 (Fig. 21.6) ; v1 fait l’angle u 1 avec la normale au plan. D’après les théorèmes
généraux appliqués à la boule, on a, en primant les grandeurs cinématiques après le choc :
2m 1r2
(V1 − V1 ) = CI × P (r)
DP = m 1(v1 − v1 ) = P (r) et DL C =
5
P(r) étant la quantité de mouvement reçue par la boule au point de contact I.
Supposons le choc élastique ; alors P (r) est normal au plan fixe et la boule garde son énergie
cinétique. Les équations précédentes donnent :
2m 1R2
v1,x
− v 1,x = P(xr)
v1,y − v1,y = 0
(V 1 − V1 ) = 0
et
5
puisque CI et P(r) sont colinéaires. En appelant u 1 l’angle que fait v1 avec la normale, la deuxième
équation donne : v1 sin u 1 = −v1 sin u1 . Comme le choc est élastique et la vitesse de rotation inchangée
V1 = V 1, la norme de la vitesse du centre de masse est elle aussi inchangée : v 1 = v1. On en déduit
la relation suivante, bien connue en optique géométrique (loi de la réflexion) :
u1 = −u1
371
Mécanique des chocs
III . 4 . — Quantité de mouvement reçue sur l’axe
a) Expression
Dans le problème concret du pendule balistique (Fig. 21.2), distinguons, dans la quantité de mouvement reçue P(r) , la contribution P(cr) associée aux actions de contact qu’exerce l’axe de rotation de
celle P(Ar) due au projectile A. L’application des théorèmes généraux de la mécanique des chocs à la
tige seule donne :
(r)
(r)
(r)
DP = P A + P (cr) et DL O = LO,A + LO,c
(r)
(r)
où LO,A = OA × PA est le moment cinétique reçu en O, de la part de A.
Comme DP = M v C − 0 = MV × OC et DLO = I OV − 0, il vient :
P(cr) = DP − P (Ar) = MV × OC − P(Ar)
et L(Or,)c = DLO − L (Or,)A = IOV − OA × P (Ar)
b) Annulation des échanges sur l’axe
On évite l’usure et donc la détérioration de la liaison en O en annulant les échanges au niveau de
l’axe de rotation :
(r)
(r)
0 = MV × OC − PA
et 0 = IOV − OA × P A
d’où :
IO V = OA × (M V × OC) = M[V(OC · OA) − OC(V · OA)] = MV(OC · OA)
puisque V est perpendiculaire à OA. Il en résulte, en identifiant, que le moment d’inertie doit être
égal à :
IO = M (OC · OA) = Mbd
c Dunod – Toute reproduction non autorisée est un délit
d étant la distance du centre de masse à l’axe de rotation et b = OA la distance de l’axe de rotation à
la direction de la quantité de mouvement reu̧e en A. La condition précédente s’écrit aussi :
IC
I C = IO − Md2 = Mbd − Md 2 = Md(b − d) d’où b = d +
Md
Dans le cas considéré d’un pendule balistique constitué d’une tige homogène oscillant autour d’un
axe horizontal, on a d = l/2 et IC = Ml2/12 = Md 2/3 ; on annule donc la quantité de mouvement
reçue sur l’axe en heurtant la tige à la distance b = 2l/3 de l’axe de rotation.
Remarques : (1) Nous verrons au chapitre 25 que la longueur b = I O/(Md) représente la longueur du
pendule simple synchrone du pendule pesant constitué par la tige.
(2) Le mouvement de rotation d’une raquette de tennis autour du poignet d’un joueur
peut être grossièrement assimilé au précédent : le joueur ressent les effets de l’opposé de
la quantité de mouvement reçue sur l’axe au moment où la raquette heurte la balle. Ces
effets sont négligeables si le joueur saisit le manche de la raquette à une distance b du
point où se produit le choc sur la balle. Une même analyse pourrait être transposée à la
bonne utilisation d’un marteau pour enfoncer un clou.
CONCLUSION
Rappelons les points les plus importants :
(1) Les théorèmes généraux de la mécanique des chocs ont pour expressions :
t+t
DP = P (r) =
t
(r)
Fex d t
et DL O = L(Or) =
t+t
t
M O,ex d t
où P (r) et LO désignent les échanges de quantité de mouvement et de moment cinétique par l’intermédiaire des forces et des moments extérieurs.
372
21. Mécanique des chocs
(2) En raison de la très faible durée des chocs, ces échanges sont négligeables si les forces sont
finies :
DP = 0 et DLO = 0
d’où la conservation de la quantité de mouvement et du moment cinétique :
Pi = Pf et L O,i = LO,f
(3) On distingue le choc élastique du choc inélastique à l’aide de l’énergie cinétique. Si l’énergie
cinétique du système est conservée, le choc est élastique ; sinon il est inélastique. Dans le cas extrême où
la perte d’énergie cinétique du système est maximale, le choc est parfaitement inélastique. On introduit
généralement le facteur de restitution en énergie cinétique εe, rapport de l’énergie cinétique finale sur
l’énergie initiale ; ce facteur vaut 1 pour une collision élastique et 0 pour une collision parfaitement
inélastique.
EXERCICES ET PROBLÈMES
P21– 1. Pendule balistique
Un solide peut tourner sans frottement autour d’un axe horizontal Oz fixe dans un référentiel
terrestre. On désigne par M sa masse, C son centre d’inertie et I son moment d’inertie par rapport
à l’axe Oz (Fig. 21.7). À une date t = 0, un projectile de dimensions négligeables, de masse m, de
vitesse v horizontale et orthogonale à Oz, heurte le solide au repos, en un point K où il reste collé.
1. Déterminer la vitesse angulaire V de l’ensemble, immédiatement après le choc, en fonction de
m, v, I , h = OH et a = (OK , OC).
2. Exprimer les composantes, sur les axes Ox et Oy, de la quantité de mouvement du système,
immédiatement après le choc, en fonction de M , l = OC, V, m, h et a.
3. Pour quelles valeurs de h et a, la réaction qui s’exerce sur l’axe est-elle nulle ? Déterminer
alors l’énergie cinétique du système, immédiatement après le choc, en fonction de m, v, h et I . En
déduire l’expression de la vitesse v du projectile en fonction de g, h, I, m et um l’élongation
angulaire maximale après le choc.
y
g
Oz
v
K
αC
H
x
OC = l
OH = h
F IG . 21.7.
H
h
g
C
I
F IG . 21.8.
P21– 2. Coup horizontal sur une boule de billard
Avec une queue de billard, on fournit, à une boule de billard (rayon r, masse m), une quantité
de mouvement horizontale, au cours d’un choc localisé en un point de la boule situé à la distance h du
plan du billard (Fig. 21.8).
1. Établir la relation entre la vitesse angulaire V acquise par la bille et la vitesse v de son centre
de masse.
2. En exprimant la vitesse de glissement après le choc, en fonction de v C, r et h, étudier le mouvement ultérieur de la bille dans le cas où h > 7r/5. Mêmes questions pour h = 7r/5 et h < 7r/5.
373
Mécanique des chocs
P21– 3. Balle superélastique
Une balle sphérique superélastique (masse m, rayon r) heurte le sol horizontal Oxy avec une
vitesse v et une vitesse angulaire V perpendiculaire au plan vertical Oxy contenant v (Fig. 21.9). Le
contact a lieu avec frottement.
y
1. Écrire les théorèmes de la mécanique des chocs appliqués à la balle,
relatifs à la quantité de mouvement, au moment cinétique en son centre
Ω
de masse et à l’énergie cinétique. On supposera que la quantité de mouvev
ment fournie à la balle est contenue dans le plan vertical Ozx. Le système
d’équations obtenu peut-il être résolu sans l’adjonction d’équations suppléx
mentaires ?
F IG . 21.9.
2. Le choc est inélastique du fait des frottements, mais la variation
d’énergie cinétique de la balle peut être négligée ainsi que la variation de
la valeur absolue de la composante de la vitesse v. Que deviennent les équations précédentes ? En déduire les relations donnant la composante tangentielle de v et la rotation angulaire V après le choc, en
fonction de ces mêmes quantités avant le choc.
3. Étudier le cas où V = 0 et la composante v x de la vitesse suivant l’axe horizontal Ox est
positive.
P21– 4. Collision inélastique parfaite de deux disques en rotation
Un disque D 1 ayant un mouvement de rotation, sans frottement, de vitesse uniforme V1 , autour d’un axe vertical Oz, est mis en contact avec un disque D2 , tournant autour du même axe, sans
frottement, à la vitesse uniforme V2 (Fig. 21.10). Grâce à des frottements entre D1 et D2 , les deux
disques forment, au bout d’une courte durée, un solide unique D qui tourne autour de Oz à la vitesse V.
1. Exprimer V en fonction de V1 , V2 et des moments d’inertie respectifs I1 et I 2 .
2. Calculer la variation d’énergie cinétique. Commenter.
O
z
A
V2
g
c Dunod – Toute reproduction non autorisée est un délit
D2
D1
l
h
V1
F IG . 21.10.
F IG . 21.11.
P21– 5. Chute protégée par une corde
Un alpiniste (masse 75 kg , harnachement compris), assimilé à un corpuscule A , est attaché à une
corde de longueur l = 100 m , dont l’autre extrémité est fixée en O . À la suite d’un faux-pas, il fait
une chute mais est finalement retenu par la corde (Fig. 21.10), laquelle limite la hauteur de chute à
h = 50 m .
1. Exprimer la percussion reçue par l’alpiniste, en fonction de m , h et g . Calculer sa valeur.
2. En réalité, en raison de son élasticité, la corde s’allonge d’une longueur totale z m , sous l’action
de la charge.
374
21. Mécanique des chocs
a) En admettant que l’énergie potentielle de pesanteur fournie par la chute s’est totalement transformée en énergie élastique de la forme Kz 2m/2 , K étant la raideur équivalente de la corde élastique,
établir l’expression de zm en fonction de m , K , h et g accélération due à la pesanteur.
b) En déduire la force maximale F m subie par l’alpiniste. Comparer sa valeur à son poids. Calculer
la raideur K pour r = Fm /(mg) = 15 .
3. Le module d’Young E de la corde est relié à sa raideur K , sa section s et sa longueur l par :
1
s
=
E
l
∂l
∂F
1
s
=
S
lK
S étant l’entropie (cf. Thermodynamique).
a) Exprimer F m en introduisant E , s et le facteur de chute fc = h/l .
b) Calculer le module d’Young d’une telle corde de diamètre 1 cm .
c) Trouver une estimation de la durée du choc, c’est-à-dire de la durée que la corde met pour
s’allonger de h à h + zm . Calculer alors la valeur moyenne de la force qui s’exerce pendant le choc.
P21– 6. Pendule balistique industriel
En vue de déformer une pièce métallique, on utilise l’impact sur cette pièce d’un chariot de masse
M c = 333 kg , articulée à l’extrémité inférieure d’un double portique formé de deux bras, de longueur
l = 3, 5 m et de masse unitaire M p = 250 kg (Fig. 21.12). On désigne par Ox l’axe vertical descendant
et par Oz l’axe de rotation.
1. a) Exprimer l’énergie potentielle de pesanteur E p de l’ensemble chariot et double portique, en
fonction de l’angle d’inclinaison a par rapport à la verticale descendante.
b) Quelle est, en fonction de la vitesse angulaire ȧ , l’énergie cinétique E k de l’ensemble, sachant
que le mouvement du chariot se réduit à une translation.
2. a) Établir l’équation reliant l’angle initial a i à la vitesse finale v f du chariot à l’instant de
l’impact pour lequel af = 0 . En déduire ai , si vf = 20 km.h −1 .
b) Quelle aurait été la valeur de a i si toute la masse du pendule avait été concentrée au centre de
masse du chariot ?
Oz
y
g
a
Pièce
à déformer
x
F IG . 21.12.
22
Mécanique des systèmes ouverts.
Théorèmes d’Euler
Jusqu’à présent, nous n’avons considéré que des systèmes fermés, c’est-à-dire des ensembles matériels identifiés. C’est ainsi que dans l’évaluation des taux de variation de quantité de mouvement, du
moment cinétique et de l’énergie, qui apparaissent dans l’écriture des théorèmes généraux de la mécanique, on considérait, au cours du mouvement, les mêmes éléments de matière.
Les systèmes ouverts sont des ensembles matériels formant le contenu matériel d’une surface fermée à travers laquelle ils peuvent échanger, avec le milieu extérieur, non seulement de l’énergie, mais
aussi de la matière. Cette surface est souvent appelée surface de contrôle Sc ou surface de référence.
Nous supposerons pour simplifier l’étude que Sc est indéformable et fixe dans le référentiel considéré.
Nous nous proposons d’établir la formulation particulière que prennent les théorèmes de la mécanique dans le cas des systèmes ouverts. Cependant, avant toute étude générale, il est instructif d’analyser
quelques exemples de systèmes ouverts.
c Dunod – Toute reproduction non autorisée est un délit
I . — EXEMPLES DE SYSTÈMES OUVERTS
Les exemples de systèmes matériels qui échangent de la masse avec le milieu extérieur sont nombreux puisque tous les êtres vivants sont des systèmes ouverts. Les fusées, les comètes, qui évoluent autour du Soleil, et les gouttes d’eau, qui traversent l’atmosphère chargée de vapeur d’eau, sont aussi des
exemples importants de systèmes ouverts.
I . 1 . — Tabouret d’inertie avec abandon de masse
Reprenons l’expérience classique illustrant la conservation de la projection verticale du moment
cinétique d’un système constitué d’une personne assise sur un tabouret, lequel peut tourner parfaitement
autour d’un axe vertical (cf. chapitres 18 et 25). Si la personne, initialement les bras tendus avec des
masses identiques aux extrémités, ramène ses bras le long du corps, la vitesse de rotation finale Vf est
plus élevée que sa vitesse de rotation initiale V i.
Proposons une légère variante de cette expérience : les bras restant tendus, la personne en rotation abandonne (sans vitesse par rapport à elle) des masses identiques (Fig. 22.1). Le théorème du moment cinétique appliqué au système fermé que constitue l’ensemble {personne et masses}, donne, en
projection suivant l’axe Oz :
(f )
d LOz
= Mex,Oz = 0
dt
376
22. Mécanique des systèmes ouverts. Théorèmes d’Euler
puisque la liaison est parfaite et que la projection du moment du poids en O suivant l’axe de rotation
(f )
est nulle. Il en résulte que L Oz = Cte.
y
B2
Vi
B1
g
Vf B 1
B2
b
O
b
B1
µ
x
B2
F IG . 22.1.
Appliquons cette conservation entre l’instant t où les masselottes sont encore tenues aux extrémités B1 et B2 et l’instant t + d t, où, bien qu’abandonnées, elles sont dans les voisinages respectifs de
B1 et B2. En désignant par b = OB1 = OB 2 la longueur des bras, v 1 et v2 les vitesses des masselottes après abandon (sans vitesse), et IOz le moment d’inertie de la personne par rapport à l’axe de
rotation, il vient :
(I Oz + 2mb2)V i = I OzV f + (OB 1 × mv1 + OB 2 × mv 2)z
Comme OB2 = −OB1 et v1 = −v 2 = bVf eu, on obtient :
(IOz +2mb 2)V i = I OzVf +2(OB 1×mv 1)
soit
(I Oz+2mb 2)V i = (I Oz Vf +2mb 2)V f
et
Vf = Vi
C’est bien ce que l’on constate expérimentalement : l’abandon des masses ne modifie pas la vitesse
angulaire de rotation du système.
I . 2 . — Fusée
Une fusée est un système matériel ouvert qui se déplace grâce à l’éjection de masse, en général des
gaz brûlés (Fig. 22.2).
Évaluons, par rapport au référentiel terrestre R, supposé galiléen, la variation de quantité de mouvement du système fermé caractérisé par la masse M(t) à l’instant t. À l’instant t + d t, la masse de
la fusée est devenue M(t + d t) = M(t) + d M, plus faible que M (t), car la fusée a éjecté une masse
(− d M > 0) de gaz. On a donc :
i) à l’instant t, P (f ) (t) = M (t)v(t) ; le signe f , qui est un indice et non un exposant, rappelle que
le système auquel on applique les théorèmes généraux est fermé,
ii) à l’instant t + d t, P (f )(t + d t) = M(t + d t)v(t + d t) + (− d M )[v(t + d t) + u], u étant la
vitesse d’éjection des gaz par rapport à la fusée.
On vérifie bien qu’à l’instant t + d t, on applique les théorèmes généraux au même système dont
une partie a pour masse M(t + d t) < M(t) et l’autre − d M > 0.
Il vient, en faisant la différence des quantités de mouvement :
d P(f ) = (M + d M )(v + d v) + (− d M)(v + d v + u) − Mv = M d v − d Mu
Si Sex désigne la somme des forces extérieures, généralement le poids Mg et la résistance de l’air R,
le théorème de la quantité de mouvement d P (f )/ d t = Sex donne :
M
dv dM
−
u = Mg + R soit
dt
dt
M
dv
+ qmu = M g + R où
dt
qm = −
dM
dt
377
Mécanique des systèmes ouverts. Théorèmes d’Euler
est le débit-masse de gaz éjectés, positif car d M est négatif. Très souvent, on met le résultat précédent
sous la forme :
dv
= M(t)g + R − q mu
M(t)
dt
Ainsi, tout se passe comme si l’on pouvait considérer la fusée comme un système fermé soumis à la
somme des forces habituelles et à une « force supplémentaire » −qmu. Cette dernière est appelée force
propulsive car c’est elle qui détermine généralement le sens du mouvement.
Remarque : Insistons bien sur l’expression tout se passe comme si ; donner à cette force supplémentaire
une autre interprétation que celle provenant d’un bilan de quantité de mouvement pourrait
conduire à des résultats erronés.
M(t + dt)
M(t)
z
R
O
Comète
g
S
(− dM ) > 0
y
T
x
F IG . 22.2.
F IG . 22.3.
I . 3 . — Comète perdant de la masse
Une comète est constituée en partie de glace. Aussi, au cours de son mouvement autour du Soleil,
et sous l’action du rayonnement solaire perd-elle de la masse par sublimation (Fig. 22.3). Évaluons, pour
le système fermé caractérisé par la masse M (t) à l’instant t, la variation de quantité de mouvement par
rapport au référentiel galiléen de Copernic. On a :
i) à l’instant t, P (f )(t) = M (t)v(t),
c Dunod – Toute reproduction non autorisée est un délit
ii) à l’instant t + d t : P (f ) (t + d t) = M(t + d t)v(t + d t) + (− d M )v(t + d t).
Comme pour la fusée, le système auquel on applique les théorèmes généraux est constitué des
mêmes éléments. À l’instant t + d t, une partie de la glace (− d M > 0) a été sublimée.
Explicitons la différence des quantités de mouvement précédentes. Comme v(t + d t) = v + d v,
il vient :
d P(f ) = (M + d M )(v + d v) + (− d M)(v + d v) − Mv = M(v + d v) − M v = M d v
En utilisant le théorème de la quantité de mouvement, d P(f ) / d t = S ex, S ex désignant la somme des
forces qui s’exercent sur la comète, principalement la gravitation, il vient :
M(t)
dv
= Sex
dt
Remarque : Ce résultat n’est pas surprenant : c’est celui de la fusée avec une vitesse d’éjection u
nulle.
378
22. Mécanique des systèmes ouverts. Théorèmes d’Euler
I . 4 . — Goutte d’eau évoluant dans une atmosphère chargée de vapeur d’eau
Lorsqu’une goutte d’eau évolue dans une atmosphère de vapeur saturante d’eau, sa masse peut augmenter du fait de la condensation. Évaluons, par rapport au référentiel terrestre, la variation de quantité
de mouvement du système fermé, de masse M(t + d t), constitué de la goutte d’eau, de masse M(t), et
de la masse d’eau d M > 0 qui se condense à t + d t. On a :
i) à l’instant t, P(f ) (t) = M (t)v(t) + d M × 0 = Mv ,
ii) à l’instant t + d t, P (f )(t + d t) = M (t + d t)v(t + d t) = (M + d M )(v + d v).
Là aussi, on vérifie que le système considéré est bien fermé, puisque aux instants t et à t + d t ce sont
les mêmes éléments de masse qui sont pris en compte.
Effectuons la différence de ces quantités de mouvement :
d P(f ) = M d v + v d M + d M × d v
soit
d P(f ) = M d v + v d M
puisque le terme d M × d v est négligeable. Si Sex désigne la somme des forces extérieures qui
s’exercent sur la goutte entre les instants t et t + d t, le théorème de la quantité de mouvement,
d P(f )/ d t = S ex , donne :
dv
dM
+v
= Sex
M
dt
dt
II . — CARACTÈRE CONSERVATIF DE LA MASSE
Nous avons caractérisé un système ouvert par le contenu matériel variable d’une surface fermée
fixe Sc par rapport au référentiel d’étude R (Fig. 22.4a). À travers S c s’effectuent des échanges de
matière avec l’extérieur.
La masse d’un système matériel est une grandeur conservative, c’est-à-dire que le terme de création
de masse dans un bilan de masse est nul (cf. chapitre 13) : entre deux dates voisines t et t + d t, on a :
d M = dM(r) + dM(c)
avec
dM (c) = 0
dM r étant la masse reçue à travers la surface S c. Ainsi, la variation de la masse du contenu matériel
de la surface Sc ne peut être attribuée qu’à l’échange de masse à travers la surface.
Considérons le cas particulier important où les échanges sont localisés en deux points de S c . C’est
la situation fréquente où, pendant la durée élémentaire d t, Sc reçoit la masse dme par l’orifice d’entrée
Ae et perd la masse dm s par l’orifice de sortie A s (Fig. 22.4b). On a :
d M = dM(r) = dme − dms
soit aussi
dme dms
dM
= qm,e − qm,s
−
=
dt
dt
dt
en introduisant le débit-masse qm = dm/ d t à l’entrée et à la sortie. L’équation de conservation de la
masse s’écrit donc :
dM
= (qm )es
dt
En régime stationnaire d M/ d t = 0 et par conséquent : (qm) es = 0 soit :
qm,e = qm,s = q m
379
Mécanique des systèmes ouverts. Théorèmes d’Euler
n
d
Ae v e
dS
ne
ΔSe
a)
ns
As
ΔSs
vs
Sc
b)
F IG . 22.4.
Remarques : (1) Dans le cas de la fusée et de la comète, la variation d M de la masse se réduit à −dm s
puisque dme = 0. Pour la goutte d’eau d M = dm e.
(2) Notons l’analogie entre la conservation de la masse et la conservation de la charge
électrique (cf. Électromagnétisme).
(3) En relativité, l’équation-bilan de masse n’existe pas de façon autonome, car la masse
n’est qu’une forme de l’énergie (cf. Relativité et invariance).
III . — THÉORÈME DE LA QUANTITÉ DE MOUVEMENT
III . 1 . — Énoncé
D’après ce qui précède, l’équation-bilan de la masse s’écrit, dans le cas où les échanges de matière
sont localisés en deux points, l’entrée A e et la sortie A s (Fig. 22.4b) :
d M = dme − dm s ce qui donne
M(t) + dm e = M(t + d t) + dms
Appliquons le théorème de la quantité de mouvement, entre les instants t et t + d t, au système fermé
de masse M(t) + dme = M(t + d t) + dms . Il vient :
d P(f ) = Sex d t
avec
P(f ) (t) = P(t) + dme ve
et P(f ) (t + d t) = P(t + d t) + dm svs
c Dunod – Toute reproduction non autorisée est un délit
P(t) étant la quantité de mouvement du contenu matériel de S c à l’instant t. Il en résulte, en effectuant
la différence :
d P + dmsv s − dme ve = Sex d t soit d P = Sex d t + (dmv) es
Cette équation traduit le bilan de quantité de mouvement relatif à un système ouvert, entre deux instants
infiniment voisins ; le premier terme de droite est un échange par l’intermédiaire des forces et le second
un échange par transfert de matière. Comme la quantité de mouvement est une grandeur conservative, il
n’y a pas de terme de création. En divisant le bilan précédent par d t, on obtient :
dP
= S ex + (qm v)es
dt
Notons que ce bilan est relatif au référentiel R par rapport auquel la surface de contrôle S c est fixe et
indéformable. Si R n’est pas galiléen, il faut ajouter, aux forces dues à la présence d’autres corps, les
forces d’inertie d’entraînement et de Coriolis.
III . 2 . — Théorème d’Euler relatif à la quantité de mouvement
En régime stationnaire (d P/ d t = 0), le théorème de la quantité de mouvement d’un système ouvert se réduit au théorème d’Euler, du nom du mathématicien suisse L. Euler. Comme q m,e = q m,s = qm ,
il s’écrit :
qm(vs − ve) = S ex
380
22. Mécanique des systèmes ouverts. Théorèmes d’Euler
III . 3 . — Exemples d’application du théorème de la quantité de mouvement
a) Équation du mouvement de la fusée
Le fonctionnement de la fusée relève de l’application directe du théorème d’Euler par rapport au
référentiel non galiléen R lié à l’armature de la fusée. Dans ce cas, v e = 0, v s = u et S ex est la
somme des forces suivantes : le poids M(t) g, la résultante aérodynamique R et la force d’inertie
d’entraînement −M (t) a, a désignant l’accélération d’un point quelconque de la fusée, du fait de la
translation, par rapport à un référentiel galiléen R. Il en résulte que :
qmu = M(t)g + R − M (t) a
On retrouve bien l’équation déjà établie, dans laquelle u est la vitesse d’éjection des gaz par rapport à
la fusée :
M(t) a = M(t)g + R − qmu
Ordre de grandeur : La force de poussée au décollage du lanceur Ariane 5, dont la masse totale est
730 t, est obtenue grâce au moteur Vulcain, qui développe une poussée de 0, 885 MN, (1 MN = 106 N)
et de deux propulseurs à poudre de poussée 2 × 5, 3 = 10, 6 MN
La résultante R est proportionnelle au carré de la vitesse (cf. chapitre 31) : R = C x r aSv 2/2 ; dans
cette expression, Cx est un facteur sans dimension qui dépend de la forme de la fusée, ra est la masse
volumique de l’air et S l’aire de la surface de la section de la fusée dans un plan perpendiculaire à la
vitesse.
Exprimons le gain de vitesse que procure la force de poussée en supposant la résultante aérodynamique nulle. Cette hypothèse apparemment simpliste donne de bons résultats, car, en début d’ascension,
alors que la fusée se trouve dans des zones atmosphériques denses, sa vitesse est faible et, en fin d’ascension, alors que la vitesse est grande, l’air est raréfié.
En divisant les deux membres de l’équation précédente par la masse M et en intégrant entre l’instant initial pris comme origine et l’instant t au bout duquel la totalité du comburant et du carburant a
été consommée, on obtient :
t
v − v0 = −
0
g dt −
M(t)
u
M0
dM
M
soit, en négligeant les variations du champ de pesanteur avec l’altitude :
v − v 0 = −gt + u ln
M0
M(t)
Exemple : Si M0 = 158 t, t = 590 s M(t) = 9, 7 t et u = 4 200 m . s −1, on trouve :
v − v0 < 6, 01 km . s−1.
Ainsi, il est impossible, avec une fusée à un seul étage, de communiquer à une masse, située dans
le voisinage de la Terre, une vitesse égale à la vitesse d’évasion de 11, 2 km . s −1 (cf. chapitre 12).
Pour obtenir cette vitesse, on utilise des fusées gigognes constituées généralement de plusieurs
étages qui se séparent du reste de la fusée lorsqu’ils ont consommé leur réserve de comburant et carburant. L’accroissement global de vitesse est alors la somme des accroissements de vitesse de chaque
étage. Sur la figure 22.5, on a explicité les caractéristiques du lanceur européen Ariane 5.
381
Mécanique des systèmes ouverts. Théorèmes d’Euler
Coiffe
Charge utile
Case à équipements
Étage à propergol stockable (EPS)
54 m
Réservoir d’oxygène liquide
Étage d’accélération à poudre (EAP)
Réservoir d’hydrogène liquide
Étage principal cryogénique (EPC)
Moteur vulcain
Masse au décollage 770 t
F IG . 22.5.
Remarques : (1) On caractérise souvent la performance des propergols (comburants et carburants) par
le rapport i = u/g, homogène à une durée, appelée impulsion spécifique. Cette dernière
vaut respectivement 273 s, 431 s et 324 s, pour les différents étages.
(2) Afin de développer les lancements de satellites à bas coût, l’Europe compte se doter
d’un nouveau lanceur Ariane 6, dont les deux premiers étages seront constitués de propulseurs à propergol solide.
(3) Comme cela a déjà été dit, l’équation du mouvement de la comète est analogue à
celle de la fusée ; dans ce cas, u = 0 et la somme des forces se réduit à l’attraction
gravitationnelle.
c Dunod – Toute reproduction non autorisée est un délit
b) Équation du mouvement de la goutte d’eau
Le théorème de la quantité de mouvement précédemment établi permet de retrouver l’équation du
mouvement de la goutte d’eau. Il suffit de noter que les vitesses de transfert de masse sont nulles. Il
vient alors :
dP
dv
dM
= S ex soit M
+v
= Sex
dt
dt
dt
c) Propulsion d’un avion à turboréacteur
Les moteurs d’un avion à turboréacteur, se déplaçant à la vitesse v reçoivent de l’air qu’ils rejettent, avec une vitesse u par rapport à l’avion (Fig. 22.6). Comme la masse de combustible brûlé est
très faible devant celle de l’air transféré, nous la négligeons.
Dans le référentiel non galiléen lié à l’avion, le théorème d’Euler donne :
qm(vs − ve) = M(t)g + R − M(t)a
avec ve tel que 0 = v e + v et vs = u. Il vient donc :
M(t)a = M(t)g + R − qm(u + v)
382
22. Mécanique des systèmes ouverts. Théorèmes d’Euler
g
θ
R u
F IG . 22.6.
La quantité −qm(u + v) est la force propulsive. En projetant cette équation suivant la direction du
déplacement qui fait l’angle u avec l’horizontale, on trouve :
M(t)a = −M(t)g sin u + Rt + qm (u − v )
Exemple : lorsque M(t) = 4 t, u = 600 m . s −1, q m = 90 kg . s−1 et u = 30 ◦, on obtient les
valeurs suivantes des forces, lorsque la vitesse v est constante (a = 0) et vaut v = 720 km . h−1 soit
v = 200 m . s−1 :
M(t)g sin u = 19, 62 kN et Rt = −16, 38 kN
qm (u − v) = 36 kN
d) Bande transporteuse de minerai
On transporte fréquemment du minerai concassé à l’aide d’une bande transporteuse qui se déplace
à vitesse constante v. Considérons une surface de contrôle Sc qui entoure une longueur de bande
(Fig. 22.7). On distingue deux entrées, E1 par laquelle arrive le minerai avec un débit-masse qm , E2
(b)
par laquelle entre la bande avec un débit qm , et une sortie S par laquelle sortent la bande et le minerai
avec les mêmes débits respectifs. En l’absence de frottement, si on ne déverse pas de minerai, aucune
force horizontale F h n’est nécessaire pour maintenir cette vitesse. En revanche, lorsqu’on déverse du
minerai, une telle force devient nécessaire ; son expression s’obtient directement à l’aide du théorème
d’Euler. Si v e désigne la vitesse du minerai à l’entrée, on a, en régime stationnaire :
q (mb) (v − v) + qm(v − v e) = S ex
soit
qm (v − ve ) = Sex
Sex désignant la somme des forces qui s’exercent sur le système. On a donc, suivant un axe horizontal :
q mv = F h.
Minerai
E1
E2
S Minerai
v
Bande transporteuse
Sc
F IG . 22.7.
IV . — THÉORÈME DU MOMENT CINÉTIQUE
IV . 1 . — Énoncé
Appliquons le théorème du moment cinétique, entre les instants infiniment voisins t et t + d t, au
système fermé de masse M(t) + dm e = M(t + d t) + dm s, (Fig. 22.4b). Il vient :
(f )
d LO
= M O,ex
dt
avec :
(f )
(f )
LO (t) = L O (t) + OAe × dme v e et LO (t + d t) = L O(t + d t) + OA s × dms vs
383
Mécanique des systèmes ouverts. Théorèmes d’Euler
L O(t) étant le moment cinétique en un point fixe O du contenu matériel de la surface S c à l’instant t.
Il en résulte, en effectuant la différence :
d L(Of ) = d L O + OAs × dms vs − OAe × dme ve = M O,ex d t
d’où
d LO = M O,ex d t + (OA × dmv) es
Cette équation exprime le bilan du moment cinétique entre les deux instants t et t + d t : le premier
terme de droite représente l’échange par l’intermédiaire des moments de force et le second l’échange
associée au transfert de matière. Comme le moment cinétique est une grandeur conservative, il n’y a pas
de terme de création. En divisant par d t, on obtient :
d LO
= MO,ex + (qmOA × v) es
dt
Remarque : Comme pour la quantité de mouvement, ce bilan est relatif au référentiel R par rapport
auquel la surface de contrôle S c est fixe. Si R n’est pas galiléen, il faut ajouter, aux
forces dues à la présence d’autres corps, les forces d’inertie d’entraînement et de Coriolis.
IV . 2 . — Théorème d’Euler relatif au moment cinétique
En régime stationnaire (d L O / d t = 0), le théorème du moment cinétique d’un système ouvert se
réduit à, puisque q m = q m,e = q m,s :
q m(OAs × v s − OAe × ve ) = MO,ex
IV . 3 . — Tourniquet hydraulique et tourniquet à air
c Dunod – Toute reproduction non autorisée est un délit
Dans le tourniquet hydraulique destiné à l’arrosage des jardins, l’eau pénètre en E situé sur l’axe
vertical de rotation et est expulsée par les ajutages A et B situés aux extrémités de deux bras horizontaux symétriques (Fig. 22.8a). Dans le tourniquet de laboratoire à air, qui est en verre, on remplace simplement l’eau par l’air. Le débit-masse de fluide sortant par chaque ajutage est rsu , r étant la masse
volumique du fluide, s la section des ajutages et u la vitesse d’éjection du fluide par rapport aux bras,
en A et B respectivement.
y
z
−u
B
u
O
A
O
b
E
a)
Ω
Sc
−u
µ
B
u
A
b
Ω0
x
O
b)
¿
t
c)
F IG . 22.8.
Adoptons comme surface de contrôle S c la surface cylindrique, fixe dans R , définie par l’axe Oz
du tourniquet et par la surface de base balayée par les bras (Fig. 22.8b). Appelant b la longueur des bras
et u l’angle de rotation, on a, pour les vitesses par rapport à Sc des particules de fluide qui émergent
des ajutages :
v(A) = u + b u̇ eu et v(B) = −u − bu̇ eu = −v(A)
384
22. Mécanique des systèmes ouverts. Théorèmes d’Euler
a) Équation différentielle du mouvement
Le mouvement satisfait à l’équation suivante :
d LO
+ OA × rsuv(A) + OB × rsuv(B) − OE × 2rsuv(E) = M O,ex
dt
Comme la contribution de l’eau à l’entrée est nulle ( OE et v(E) sont parallèles) et que la somme M Oz,ex
des moments par rapport à cet axe des forces de pesanteur et des actions de contact sur la liaison pivot
parfaite, est nulle, on obtient, en projection suivant l’axe de rotation Oz :
d LOz
+ 2rsub(bu̇ − u cos b) = 0
dt
Dans cette équation, b est l’angle que fait la vitesse u avec la normale au bras du tourniquet.
Ce résultat traduit essentiellement la conservation du moment cinétique selon l’axe de rotation. En
introduisant le moment d’inertie I du tourniquet rempli de fluide, on obtient l’équation différentielle
linéaire suivante :
I ü + 2rsub(bu̇ − u cos b) = 0
soit
ü +
u̇
=a
t
sous sa forme canonique dans laquelle :
I
2rsu2b cos b
et
a
=
2rsub2
I
La résolution de cette équation différentielle linéaire est caractéristique de la mise en rotation d’une
machine tournante (cf. chapitre 25). La solution s’écrit :
t
+ at
u̇ = Cte × exp −
t
Comme at = V 0 = u cos b/b , il vient, si à l’instant initial u̇ = 0 :
t
u̇ = V0 1 − exp −
t
La courbe u̇(t) (Fig. 22.8c) montre qu’en régime stationnaire V0 est pratiquement atteint au bout de
quelques valeurs de t .
t=
Remarques : (1) Soulignons que le terme proportionnel à u̇ n’est pas dû à un quelconque frottement
visqueux, mais au caractère ouvert du système. Un terme supplémentaire de frottement
visqueux, de la forme −a u̇ , aurait un effet analogue ! La nouvelle durée caractéristique
serait t = t + I/a .
(2) On peut retrouver l’équation caractéristique du tourniquet en adoptant une surface de
contrôle entourant les bras en rotation. Le référentiel d’étude n’étant pas galiléen, il faut
prendre en compte les forces d’inertie d’entraînement et de Coriolis (cf. Exercices).
b) Régime stationnaire
En régime stationnaire, l’équation différentielle précédente se réduit à :
2rsub(bu̇ − u cos b) = 0 d’où
u̇ = V0 =
u cos b
b
Notons que la vitesse angulaire V 0 est maximale pour b = 0 et nulle pour b = p/2 . C’est bien ce
que montre l’expérience faite avec un tourniquet hydraulique de jardin dont les ajutages peuvent être
différemment orientés.
385
Mécanique des systèmes ouverts. Théorèmes d’Euler
c) Ordres de grandeur
Dans le cas d’un tourniquet d’arrosage de jardin pour lequel b = 0, 5 m , I = 0, 25 kg.m 2 , b = 0 ,
u = 10 m.s−1 et s = 3 cm2 , on trouve :
u
I
≈ 0, 17 s
V0 = = 20 rad.s−1 soit 3, 2 tr.s −1 et t =
2rsub2
b
Avec un tourniquet à air, le résultat est analogue mais plus spectaculaire, en raison de la faible valeur
de b et de la liaison verre-verre pratiquement parfaite ; il suffit de souffler légèrement pour observer
une rotation rapide de la tête du tourniquet. En effet, avec b = 7 cm et u = 5 m.s −1 , on obtient, pour
b=0 :
5
u
≈ 71, 4 rad.s−1 soit 11, 3 tr.s−1
V0 = =
0, 07
b
Remarque : Le fonctionnement du tourniquet à eau ou air aspiré, et non expiré, a préoccupé de grands
physiciens de Princeton, notamment R. Feynman et A. Wheeler.
V . — THÉORÈME DE L’ÉNERGIE CINÉTIQUE
V . 1 . — Énoncé
Appliquons le théorème de l’énergie cinétique, entre les instants infiniment voisins t et t + d t, au
système fermé de masse M(t) + dm e = M(t + d t) + dm s. Il vient :
(f )
c Dunod – Toute reproduction non autorisée est un délit
d Ek
= dWex + dWin
dWex et dW in étant les travaux élémentaires des forces extérieures et intérieures qui s’exercent sur le
système fermé. Or :
1
1
(f )
(f )
Ek (t) = Ek (t) + dmev 2e et Ek (t + d t) = Ek(t + d t) + dms vs2
2
2
Ek(t) étant l’énergie cinétique du contenu matériel de la surface S c à l’instant t. Il en résulte, en
faisant la différence :
1
1
(f )
d Ek = d Ek + dms v2s − dme ve2 = dW ex + dW in
2
2
d’où :
e
1
d Ek = dWex +
dmv2 + dWin
2
s
Cette équation traduit le bilan d’énergie cinétique du système ouvert Sc : les deux premiers termes
représentent l’échange d’énergie cinétique, l’un par l’intermédiaire du travail des forces extérieures,
l’autre par le transfert de matière ; le troisième est le terme de création.
En divisant par d t, on trouve :
d Ek
= Pex + P in +
dt
qmv 2
2
e
s
en introduisant les puissances Pex et Pin des forces extérieures et des forces intérieures. Comme pour
les deux premiers théorèmes, ce bilan est relatif au référentiel R par rapport auquel la surface de
contrôle Sc est fixe et indéformable.
Remarque : Si R n’est pas galiléen, il faut ajouter à la puissance des forces dues à la présence d’autres
corps celle de la force d’inertie d’entraînement, la force de Coriolis ne travaillant pas.
386
22. Mécanique des systèmes ouverts. Théorèmes d’Euler
V . 2 . — Théorème d’Euler relatif à l’énergie cinétique
En régime stationnaire (d E k/ d t = 0), le théorème de l’énergie cinétique relatif à un système
ouvert se réduit à, puisque qm,e = q m,s = qm :
qm
v 2s
v2
− e
2
2
= Pex + Pin
V . 3 . — Exemples
a) Analyse énergétique de la bande transporteuse
Calculons la puissance de la force horizontale F h = qmv à exercer, en régime stationnaire, sur la
bande transporteuse de minerai (Fig. 22.7), sachant que le matériau tombe sur la bande avec une vitesse
ve négligeable :
Fh · v = Fh v = q mv 2
Cette puissance représente le double du terme d’énergie cinétique. Il en résulte, puisque les autres forces
extérieures ne travaillent pas :
qbm 2
q
q m v2
(v − v2 ) + m (v − 0)2 = F hv + Pin soit
= q m v 2 + Pin
2
2
2
La puissance des forces intérieures vaut donc : P in = −qmv 2/2. Elle est négative car elle est due aux
forces intérieures de frottement qui s’exercent sur la surface de contact entre le minerai et la bande, ce
qui permet l’entraînement du minerai.
b) Analyse énergétique du tourniquet hydraulique
Dans le tourniquet hydraulique en régime stationnaire, une masse d’eau dm e pénètre avec une
vitesse ve par rapport au sol et émerge aux deux extrémités avec une vitesse nulle. Il en résulte une
perte d’énergie cinétique que l’on doit attribuer à l’augmentation de l’énergie potentielle de pesanteur
dme gh, h étant la hauteur du tourniquet, à la différence de pression entre l’entrée et la sortie et au
travail des forces de viscosité.
CONCLUSION
Retenons la formulation suivante des théorèmes généraux de la mécanique des systèmes ouverts
échangeant de la matière en deux points, l’entrée Ae et la sortie As :
e
q m v2
dP
d LO
d Ek
= Pex + P in +
= Sex + (qmv)es
= M O,ex + (q mOA × v)es
dt
dt
dt
2
s
P, LO et E k étant les éléments cinétiques du contenu matériel d’une surface de contrôle S c , indéformable et fixe par rapport au référentiel R considéré. Cette formulation s’inspire des bilans de grandeurs : les termes (qmv)es , (qmOA × v)es et (q m v2 /2)es représentent les échanges dus aux transferts
de masse du système ouvert étudié ; seule l’énergie cinétique est une grandeur non conservative en raison de la puissance non nulle des forces intérieures.
L’importance pratique de l’étude est considérable comme le montrent les exemples traités (fusée,
turboréacteur, etc.).
Dans le cas fréquent des régimes stationnaires, les résultats précédents sont connus sous le nom de
théorèmes d’Euler et s’écrivent :
s
v2
s
s
= Pex + P in
et
qm
qm(v)e = Sex
qm(OA × v)e = MO,ex
2 e
387
Mécanique des systèmes ouverts. Théorèmes d’Euler
EXERCICES ET PROBLÈMES
P22– 1. Phase balistique du lancement d’une fusée
Une fusée, en mouvement vertical, a les caractéristiques suivantes :
– masse des structures et de l’équipement : m e = M
– masse au départ du mélange propulsif : m p = M
– la vitesse (relative à la fusée) d’éjection des gaz brûlés est constante : u = 2gT (g ≈ 9, 80 m . s −2)
– débit-masse des gaz brûlés : q m = 2M /T .
On néglige la résistance de l’air et la variation du champ de pesanteur g avec l’altitude.
1. Exprimer, en fonction de T, l’accélération à tout instant, la vitesse v 1 et l’altitude z 1 de la
fusée au moment où la combustion du carburant se termine.
2. Sachant que T = 200 s, calculer v 1, z1 et l’altitude maximale zm atteinte par la fusée.
P22– 2. Système articulé en rotation
Une tige cylindrique de section négligeable, de masse M, porte deux petites boules, de masse m,
qui peuvent coulisser sans frottement. Cette tige tourne sans frottement avec la vitesse angulaire V0
autour d’un axe vertical Oz, qui lui est perpendiculaire et qui passe par son centre de masse (Fig. 22.9) ;
les deux boules sont maintenues à la distance d de l’axe de rotation à l’aide de deux fils. On coupe les
fils et on abandonne le système à lui-même.
1. Trouver, en appliquant le théorème du moment cinétique, la vitesse de rotation angulaire V 1 de
la tige lorsque les boules atteignent les extrémités de la tige situées à la distance l de l’axe. En déduire,
à l’aide de l’énergie, la vitesse de glissement v des boules sur la tige.
2. Calculer la vitesse angulaire V 2 lorsque les deux boules quittent les extrémités de la tige.
z
c Dunod – Toute reproduction non autorisée est un délit
z
F
g
O
y
O
x
F IG . 22.9.
F IG . 22.10.
P22– 3. Chaîne soulevée à vitesse constante
Une chaîne homogène, de masse linéique r l , repose en tas sur le plan horizontal d’un référentiel
terrestre (Fig. 22.10). On soulève la chaîne, à vitesse constante v, en exerçant une force F sur son
extrémité supérieure. Exprimer F en fonction de v et de la cote z du centre de masse de la partie
rectiligne de la chaîne.
388
22. Mécanique des systèmes ouverts. Théorèmes d’Euler
P22– 4. Déplacement d’un véhicule par perte de matière
Un véhicule, rempli d’eau, est en mouvement sur un plan horizontal, grâce à l’échappement d’eau
par un orifice de section s situé à l’arrière (Fig. 22.11). Exprimer, en fonction du débit-masse d’eau q m
et de la vitesse u horizontale d’éjection par rapport au chariot, la force horizontale exercée par le
sol qui permet au chariot d’avancer à vitesse constante ; on appliquera le théorème d’Euler à la surface de contrôle pSc , en pointillés sur la figure, fixe par rapport au camion. Application numérique :
s = 10 cm2 et u = 10 m . s −1 .
S
g
g
h
u
F IG . 22.11.
F IG . 22.12.
P22– 5. Avion à décollage vertical
Chacun des deux moteurs d’un avion à décollage vertical, de masse 7 tonnes, éjecte vers le bas
60 kg d’air et 1 kg de carburant par seconde, à la vitesse de 600 m . s−1 (Fig. 22.12). Calculer la
valeur de l’accélération verticale au décollage, lorsque la vitesse de l’avion est nulle.
P22– 6. Tourniquet en référentiel non galiléen
Retrouver l’équation du tourniquet en appliquant le théorème du moment cinétique dans un référentiel non galiléen lié aux bras du tourniquet. Quelle force doit-on exercer au milieu de l’un des bras
pour le maintenir immobile ?
23
Statique
La statique est l’étude des conditions pour lesquelles les corps sont immobiles, relativement à un
référentiel R, galiléen ou non, lié à l’observateur. Ces conditions concernent notamment la répartition
des forces qui s’exercent sur ces corps au repos. Cette étude conduit donc à l’analyse des solutions qui
réalisent la constance des degrés de liberté {qi } du système considéré.
Nous allons d’abord établir, dans le cas de systèmes de corps ponctuels et de solides, les conséquences qu’entraîne l’immobilité sur les forces. Nous étendrons ensuite ces résultats à des systèmes
déformables tels que les fils. La statique des fluides sera envisagée ultérieurement (cf. chapitre 28).
I . — STATIQUE DES CORPS PONCTUELS ET DES SOLIDES
Les équations de la statique qui expriment l’immobilité d’un système sont celles de la dynamique
dans lesquelles on a annulé les dérivées premières {q̇ i} et secondes { q̈i } des degrés de liberté. Si le
système est constitué de N corps ponctuels et s solides, les conditions de l’immobilité du système sont
celles de l’immobilité de chacun des N corpuscules et de chacun des s solides.
c Dunod – Toute reproduction non autorisée est un délit
I . 1 . — Statique d’un corps ponctuel
Considérons un corpuscule A soumis à plusieurs forces (force à distance, force de contact et éventuellement forces d’inertie). Comme la position de A est une constante (r = Cte, v = 0), d’après la
loi fondamentale de la dynamique d p/ d t =
F, on doit avoir :
F=0
F contient, en outre, la force d’inertie d’entraînement, la force
Si le référentiel R n’est pas galiléen,
d’inertie de Coriolis étant nulle du fait de l’immobilité.
Ainsi, pour qu’un corpuscule, initialement immobile par rapport à un référentiel R, reste au repos,
F des forces qui lui sont appliquées soit nulle. Évidemment, si le corps
il faut et il suffit que la somme
n’est pas initialement immobile, cette condition sur la somme des forces n’implique pas l’immobilité
ultérieure puisqu’alors a = 0 et donc v = Cte.
Il convient donc de distinguer l’immobilité (par rapport à un référentiel) et l’équilibre mécanique
F = 0.
que l’on définit par la seule condition
390
23. Statique
Exemple : Considérons une masselotte immobile sur une tige en mouvement sous l’action de son
poids mg = −mg ez, de la réaction R sans frottement qu’exerce la tige, de la tension T = −K (r −l 0 ) e r
due au ressort et de la force d’inertie d’entraînement Fie (Fig. 23.1) :
Fie = −m ae = −m V × (V × OA) = m V 2HA
H étant la projection de A suivant l’axe de rotation. Cherchons la position de repos de A sur la tige,
dans le cas où cette dernière tourne uniformément autour d’un axe vertical, en faisant un angle constant
avec cet axe :
ẇ = V = Cte et u = u0 = Cte
Écrivons que la somme de ces quatre forces est nulle :
m g + R − K (r − l 0 ) er + m V2 HA = 0
ce qui donne, en projetant dans la base sphérique {eu , ew, e r } et en notant que V = V ez et OA = r e r :
−mg
R
− sin u 0
0
0
V 2 sin u 0 cos u0
Ru
0
0
0
Rw + mr 0
+
+
=
2
2
cos u 0
R −K (r − l 0)
R 0
R V sin u0
R 0
La dernière équation fournit la relation entre V, u0 , r pour que A soit immobile sur la tige. Les deux
autres équations permettent d’exprimer les composantes de la réaction. On retrouve bien que la réaction
est contenue dans le plan vertical Ouz, comme les autres forces : Rw = 0.
H
Ω
z
y
r
θ0
I2
A
g
eϕ
O
ϕ
x
R2 K
C
g
y
P
θ0
u
O
eθ
Ás
Rt
®
I1
F IG . 23.1.
x
F IG . 23.2.
I . 2 . — Statique d’un solide
a) Condition nécessaire et suffisante
Considérons un solide S soumis à un système de plusieurs forces dans un référentiel R. Le
nombre de ses degrés de liberté est six, par exemple les trois coordonnées du centre de masse et les
trois angles d’Euler (cf. chapitre 16). D’après les théorèmes généraux de la mécanique, S initialement
au repos le reste si le torseur des forces extérieures est nul, précisément si la somme et le moment des
forces extérieures sont tous deux nuls :
S ex = 0
et MI,ex = 0
I étant un point quelconque de R car, la somme des forces extérieures étant nulle, la somme des
moments de ces forces a même valeur en tout point (cf. chapitre 1).
391
Statique
b) Rôle des actions de contact
Dans le torseur des actions extérieures, il convient de distinguer les actions de contact, en parties inconnues, des actions connues. Notant [F, M] le torseur des forces connues (somme et moment)
et [R, G] le torseur des forces de contact (réaction et moment des actions de contact), la condition précédente s’écrit, en un point quelconque I :
F+R = 0
et
M I + GI = 0
Comme un même solide peut être au repos sous l’action d’un autre torseur de forces connues, la relation précédente doit être interprétée comme une « réaction » adaptée du torseur des actions de contact
(R, GI) au torseur des actions connues.
c) Traduction analytique
On explicite généralement les équations vectorielles précédentes dans la base la plus commode.
Dans cette dernière on obtient alors les six équations suivantes :
F x + Rx = 0
F y + Ry = 0
F z + Rz = 0
M x + Gx = 0
M y + Gy = 0
M z + Gz = 0
et
Il existe des cas particuliers importants qu’il est utile d’envisager.
i) Si toutes les forces appliquées sont parallèles ou concourantes, le torseur est celui d’une force
unique (cf. chapitre 1). L’annulation de ce torseur ne fournit que trois équations.
ii) Si toutes les forces appliquées sont situées dans un même plan, par exemple Oxy, il est judicieux d’utiliser un système d’axes lié à ce plan ; les équations de l’équilibre se réduisent alors aux trois
équations suivantes :
F x + Rx = 0
Fy + R y = 0
et
Mz + Gz = 0
iii) Si le torseur des forces appliquées au solide est celui associé à trois forces, son équivalence à
un torseur nul impose aux trois forces d’être coplanaires et concourantes (cf. chapitre 1).
d) Exemple : équilibre d’une échelle
c Dunod – Toute reproduction non autorisée est un délit
Pour simplifier l’analyse, représentons l’échelle par une tige I 1I 2 , de longueur L, en contact ponctuel avec le sol horizontal Ox et le mur vertical Oy (Fig. 23.2). On suppose que le contact en I 2 est
sans frottement. Les équations vectorielles de la statique s’écrivent, avec des notations explicites :
R1 + R 2 + mg = 0
et I1C × mg + I 1I2 × R 2 = 0
En désignant par l la distance I1C, qui sépare I1 du centre de masse C, et a l’angle que fait OC avec
l’axe Ox, les équations précédentes, qui traduisent l’équilibre, se projettent dans la base (ex , e y ) selon :
X 1 + X2 = 0
Y 1 + mg = 0
et
mgl cos a − LX 2 sin a = 0
On en déduit :
Y1 = −mg
X1 = −X2 = −
mgl
L tan a
et
|X1|
l
tan fs
=
L tan a
|Y 1|
f s étant l’angle de frottement statique échelle-sol. La condition d’immobilité est donc :
l 1
L 2
Ces résultats peuvent être retrouvés géométriquement. Les trois forces qui s’exercent sur la barre étant
concourantes, la réaction R1 passe par le point K intersection de R 2 et du poids mg.
tan a tan f s
392
23. Statique
I . 3 . — Statique d’un ensemble de plusieurs solides
La statique d’un ensemble de plusieurs solides conduit à un système d’équations algébriques. Ce
système possède plusieurs inconnues qui sont, d’une part ses degrés de liberté, d’autre part les actions
arbitraires telles que les forces et les moments de contact.
Si le nombre d’équations est égal au nombre d’inconnues, la résolution du système d’équations
linéaires obtenues est possible ; l’ensemble est dit isostatique.
Si le nombre d’équations est supérieur au nombre d’équations, la résolution est impossible ; on
dit que l’ensemble est hyperstatique. Dans ce cas, on ne progresse qu’en introduisant des équations
supplémentaires qui traduisent la déformation des solides réels.
En général, on s’arrange pour réaliser l’isostaticité afin de pouvoir évaluer et donc maîtriser les
efforts qui s’exercent aux articulations, sans équations supplémentaires.
Un exemple typique de système articulé est celui représenté sur la figure 23.3a. Trois tiges AD, DB
et CF, de masses négligeables et situées dans un même plan vertical, forment un système à cinq articulations A, B, C, D, E. L’ensemble est soumis à la force verticale extérieure F1 appliquée à l’extrémité
F de la tige CF. Cette dernière est articulée au point E : on a EC = a/2 et on pose EF = c.
R4
y
D
4
F
F1
2b
E
5
30◦
D
R5
C
3
1
A
2a
F
C
E
4a
B
2
R1
F1
x
a)
R3
A
R2
B
b)
F IG . 23.3.
On désigne par R 1 la force qui s’exerce en A sur AD, R2 la force qui s’exerce en B sur DB,
R3 la force exercée par FC en C sur DB, R4 la force exercée par DB en D sur AD et R 5 la force
exercée par DB en E sur FC.
Chacune de ces cinq articulations introduit deux inconnues de contact, d’où dix inconnues au total.
Or l’immobilité de chaque tige dans le plan se traduit par trois équations scalaires (deux issues de la
somme des forces et une provenant de la somme des moments) ; on a ainsi en tout dix équations. Le
calcul des réactions est donc impossible.
On peut rendre le système isostatique en imposant à l’une des forces une ligne d’action déterminée ;
par exemple, supposons que la réaction R3 soit normale à DB en C.
L’immobilité de FC donne les équations :
F1 + R5 − R 3 = 0
et EF × F 1 + EC × (−R3 ) = 0
En explicitant, avec des notations cohérentes (Xi est la composante suivant x de la force R i), on
obtient :
√
3
R3
a
X5 − R3
=0
− F1 + Y5 −
=0
cF 1 − R3 = 0
2
2
2
d’où
√
2c
c 3
c
R3 = F1
X5 =
F1
Y 5 = F1 1 +
a
a
a
393
Statique
De même, l’immobilité de la tige AD est traduite par les équations vectorielles :
R1 + R4 − R 5 = 0 et AD × R 4 + AE × (−R5 ) = 0
Enfin l’immobilité de la tige DB donne :
R2 − R4 + R 3 = 0
et BD × (−R 4) + BC × R3 = 0
Il en résulte, en explicitant ces équations vectorielles :
X1 + X 4 − X5 = 0
Y 1 + Y4 − Y5 = 0
2bX 4 − bX 5 = 0
et
√
R3
3
X2 − X4 + R3
=0
Y 2 − Y4 +
=0
2aY4 + 2bX4 − 2aR3 = 0
2
2
On en déduit :
√
√
X5
c 3
c 3
c
c
X4 =
F1 = X 1
X2 = −
F1
Y4 = −Y2 = F 1 et Y 1 = 1 +
F1
=
2
2a
2a
2a
2a
Sur la figure 23.3b, on peut vérifier que les forces F1, R 5 et −R3 sont concourantes, ainsi que les
forces R1, R4 et −R 5 . Quant aux forces R2, −R 4 et R 3, elles sont parallèles.
II . — STATIQUE DES FILS
Les fils sont des courbes matérielles, déformables, de sections très inférieures à leurs longueurs,
que l’on utilise souvent pour relier les solides entre eux. Les conditions de la statique de ces systèmes
sont celles de chacun de leurs éléments. Il convient donc d’exprimer les forces qui s’exercent sur chaque
élément et d’annuler leur somme et leur moment.
c Dunod – Toute reproduction non autorisée est un délit
II . 1 . — Analyse des forces appliquées à un élément de fil
Considérons l’élément d s = MM du fil AB. Il est soumis aux forces de pesanteur rl d s g et aux
forces exercées par les parties situées à droite et à gauche de l’élément. Si on néglige leur moment, c’està-dire la rigidité du fil, on peut caractériser ces dernières forces par le vecteur tension du fil T(M , t),
tangent au fil, qu’exerce la partie droite du fil sur la partie gauche (Fig. 23.4). La résultante des forces
de tension qui s’exercent sur l’élément d s s’écrit :
∂T
ds
T(s + d s, t) − T(s, t) ≈
∂s
y
g
A
g
B
A
+
M ( s)
ds M ( s + ds)
F IG . 23.4.
B
T
α
a
O
F IG . 23.5.
x
394
23. Statique
II . 2 . — Équation fondamentale de la dynamique des fils
Exprimons la loi fondamentale de la dynamique pour l’élément d s, de masse r l d s. On a :
rl d s a = rl d s g +
∂T
ds
∂s
a=g+
d’où
1 ∂T
rl ∂s
II . 3 . — Équation de la statique
Le fil étant immobile, on a : a = 0 et ∂ T/∂s = d T/ d s, puisque la variable temps n’intervient
pas. Par conséquent :
1 dT
=0
rl d s
g+
En introduisant les vecteurs unitaires et , tangent au fil, et e n orienté dans le sens de la concavité,
l’équation vectorielle précédente s’écrit, si R désigne le rayon de courbure :
g+
1
rl
dT
T
et + e n = 0
ds
R
a) Statique d’un fil pesant homogène
Cherchons la forme que prend un fil homogène immobile sous l’action de son seul poids. Avec les
notations de la figure 23.5, la relation vectorielle traduisant le repos fournit, suivant les axes horizontal
Ox et vertical Oy, les deux équations scalaires suivantes :
d
(T cos a) = 0 et
ds
1 d
(T sin a) = 0
rld s
−g+
Il vient, en intégrant :
T cos a = C1
T sin a = r l g s + C2
et
tan a =
rl gs + C 2
C1
C 1 et C2 étant deux constantes. On en déduit :
s=
C1 tan a − C 2
r lg
et
ds =
C1 d a
rl g cos2 a
En outre d x = d s cos a et d y = d s sin a. Par conséquent :
x=
cos a d s =
da
cos a
C1
r lg
et y =
sin a d s =
C1
r lg
Posant a = C1 /(rl g), on obtient après intégration :
x = a ln tan
p a
+
4
2
+ x0
et
y=
a
+ y0
cos a
On élimine a en remarquant que, dans l’équation précédente donnant x, on a :
exp
x − x0
a
= tan
1 + tan(a/2)
p a
+
=
4
2
1 − tan(a/2)
d a sin a
cos2 a
395
Statique
d’où :
exp
x − x0
x − x0
+ exp −
a
a
=
1 + tan(a/2)
1 − tan(a/2)
1 + tan 2 a/2
2
+
=
=2
2
1 − tan(a/2)
1 + tan(a/2)
1 − tan a/2
cos a
On trouve finalement :
cosh
x − x0
a
=
y − y0
1
=
cos a
a
d’où
y − y 0 = a cosh
x − x0
a
C’est l’équation d’une chaînette. Sur la figure 23.5, les constantes x 0 et y 0 ont été prises égales à 0.
b) Application à l’enroulement d’un fil sur un solide
Considérons un fil, de masse négligeable (r l ≈ 0) en contact avec un solide fixe. Chaque élément
est soumis à une force supplémentaire de réaction R l d s (Fig. 23.6).
A
B
en
D
C
®e
M
® et
R l ds
F IG . 23.6.
La condition de l’immobilité d’un élément de fil, en contact avec le solide au point M, s’écrit :
0=
dT
d(T e t )
de
dT
+ Rl =
+ Rl =
et + T t + Rl
ds
ds
ds
ds
Or d et / d s = en d a/ d s avec a = (AC, et ). Par conséquent, on obtient, en projetant :
c Dunod – Toute reproduction non autorisée est un délit
dT
+ R l,t = 0
ds
et
T
da
+ Rl,n = 0
ds
Comme T d a/ d s > 0, Rl,n < 0 ; la réaction Rl d s qu’exerce le solide sur le fil est bien dirigée vers
l’extérieur du solide.
Remarque : Si le contact s’effectue sans frottement ou s’il n’y a pas de contact, R l,t = 0 ; la norme de
T se conserve alors le long du fil.
Étudions la variation de la tension du fil en présence de frottement. Dans l’hypothèse d’un glissement dans le sens ACDB (Rl,t < 0), les équations précédentes donnent :
dT
= −Rl,t
ds
et
T
da
= −R l,n
ds
Puisque la relation |Rl,t | = m|Rl,n | s’écrit algébriquement : −Rl,t = −mRl,n , il en résulte :
dT
da
= mT
ds
ds
soit
dT
= m da
T
396
23. Statique
En intégrant entre 0 et l’angle d’enroulement ae , on trouve :
T D = TC exp(mae )
Exemple : Pour une corde enroulée autour d’une bitte d’amarrage en fonte (m = 0, 3) , on a, avec
trois tours (ae = 6p), TD ≈ 286 × T C (Fig. 23.6). La force TD à appliquer sur la corde pour la faire
glisser est donc bien plus grande que la force TC . Ce résultat est bien connu et largement utilisé dans la
pratique portuaire.
III . — MÉTHODE DES TRAVAUX VIRTUELS
Cette méthode des travaux virtuels, qui est à l’origine de la formulation lagrangienne de la mécanique (cf. chapitre 24), s’appuie sur la notion de déplacement virtuel. Elle présente l’avantage de ne pas
exiger le calcul de toutes les réactions entre les différentes parties des systèmes considérés et donc d’être
plus efficace.
III . 1 . — Déplacement virtuel élémentaire
On appelle déplacement virtuel élémentaire tout déplacement élémentaire arbitraire, à une date
fixée, compatible avec les liaisons qui définissent le système considéré. On notera ce déplacement d v r
pour le distinguer du déplacement réel élémentaire d r.
Remarque : Bien que la notation dr pour le déplacement virtuel soit répandu, nous l’avons évitée, car
elle pourrait laisser penser que ce déplacement n’est pas une différentielle au même titre
que d r ; en outre le travail élémentaire réel et le travail élémentaire virtuel seraient notés
de la même façon : dW, d’où une source de confusion possible.
Exemples :
i) Sur une tige, le déplacement virtuel d’une masselotte est d v x alors que son déplacement élémentaire réel est d x = v x d t. On note ainsi que d v x est arbitraire et donc indépendant de la vitesse,
contrairement à d x (Fig. 23.7a).
d vr
y
A
dr
y
drr
dv r
O
A
dx
A
dv x
x
O
a)
θ
b)
x
O
θ
c)
x
F IG . 23.7.
ii) Dans le plan Oxy, le déplacement virtuel du point A est (cf. Fig. 23.7b) :
d v r = dv r er + r dv u eu
avec dv r et dvu arbitraires, alors que le déplacement élémentaire réel est : d r = d r e r + r d u eu .
Contrairement au déplacement élémentaire réel, pour lequel d r = ṙ d t et d u = u̇ d t, le déplacement
élémentaire virtuel n’est pas, a priori, tangent à la trajectoire.
iii) Si un point A coulisse sans frottement sur une tige en mouvement (Fig. 23.7c), la liaison
dépend du temps. Par conséquent le déplacement virtuel de A, compatible avec cette liaison à l’instant
t fixé, ne comporte pas de contribution angulaire, d’où : dv r = d v r er.
397
Statique
III . 2 . — Travail virtuel élémentaire
À une date quelconque t, on appelle travail virtuel élémentaire d’une force F, appliquée à un
élément d’un système, le travail élémentaire de F dans un déplacement virtuel élémentaire à cette
date :
dv W = F · dv r
Remarque : Attirons l’attention sur le travail non nul de la force de Coriolis dans un déplacement virtuel élémentaire ; en effet, d v r n’est pas a priori tangent à la trajectoire dans le référentiel
non galiléen considéré.
III . 3 . — Théorème des travaux virtuels relatif à la statique
a) Énoncé
Un système matériel quelconque S d, déformable ou non, est immobile, si chacun des points A
(t)
qui le constituent l’est sous l’action de toutes les forces F A qui agissent sur lui. On a donc, dv r étant
quelconque :
(t)
(t)
(t)
FA = 0 d’où FA · dv rA = 0 et
FA · dv r A = 0
A
(t)
en sommant sur tous les points du système. Distinguons dans F A les forces données F (d) des forces
de liaison F(l) et limitons-nous au cas particulier important où les liaisons sont parfaites. Rappelons
qu’il en est ainsi dans deux cas importants, en l’absence de frottement et en l’absence de glissement
même s’il y a frottement. On a donc :
A
F(Al) · d vr A = 0 d’où
A
F (Ad) · d v r = 0
Ainsi, pour qu’un système matériel S d , à liaisons parfaites, initialement immobile, demeure au
repos, il faut et il suffit que la somme des travaux virtuels élémentaires des forces données soit nulle.
c Dunod – Toute reproduction non autorisée est un délit
Remarque : L’attrait de ce théorème est directement lié à la simplicité des relations géométriques entre
les paramètres au cours de déplacements virtuels élémentaires.
b) Exemples
(1) Équilibre bielle-manivelle
Proposons-nous de déterminer le couple G z à appliquer suivant l’axe Oz d’une manivelle OM
lorsque l’extrémité de la bielle MB est soumise à une force F = −F ex (Fig. 23.8). Évaluons les
travaux de ces actions au cours d’un déplacement virtuel de B compatible avec la liaison en ce point :
dv W(F) = F · d vr = −F d v x
et dv W (G) = Gz dvu
À partir de la relation l2 = r 2 + x2 − 2xr cos u dans le triangle OMB, on obtient, en différentiant :
dx
−xr sin u
=
du
x − r cos u
Par conséquent, si la puissance des forces de frottement est nulle, on a :
d vW = −F d vx + Gz dv u = F
xr sin u
x sin u
+ Gz dv u = 0 d’où Gz = −Fr
x − r cos u
x − r cos u
398
23. Statique
Si la bielle est longue devant la manivelle (x r), alors Gz ≈ −Fr sin u.
y
Manivelle
M
r
A
Bielle
l
θ
l
B
x
Oz
F1
C2
l
F2
α
O
F
C1
B
x
F IG . 23.8.
F IG . 23.9.
(2) Levier à pression
On appelle levier à pression le système de deux tiges articulées identiques dont l’une a une extrémité immobile O et l’autre une extrémité B qui peut se déplacer suivant un axe (Fig. 23.9). On exerce
en A une force verticale F1 = −F1 ey dirigée vers le bas.
Afin de calculer la force F 2 = −F 2 ex que doit exercer le bâti en B pour que le système soit
immobile, considérons un déplacement angulaire virtuel élémentaire dv a. Comme :
yA = l sin a
y C1 =
l
sin a
2
yC 2 =
l
sin a
2
et xB = 2l cos a
il vient :
d yA = l cos a d a
d yC 1 =
l
cos a d a
2
d y C2 =
l
cos a d a
2
et
d x B = −2l sin a d a
On en déduit, puisque F1 · dv rA = −F1 l cos a d va et F 2 · dv rB = 2F 2l sin a dv a :
(−F 1l cos a − mgl cos a + 2F 2l sin a) d v a = 0 d’où F 2 =
F1 + mg
2 tan a
On voit aisément l’intérêt du système : pour F1 donné et a faible, F 2 peut être très grand, ce qui
permet de comprimer des objets en B.
III . 4 . — Équilibre stable d’un système matériel à liaisons parfaites
a) Condition d’équilibre
Considérons un système matériel S d à liaisons parfaites, caractérisé par une énergie potentielle
E p(q) fonction de la seule coordonnée q. D’après le théorème des travaux virtuels, on a, à l’équilibre :
A
F · d vr = − d v Ep(q) = 0
Comme cette différentielle s’écrit aussi : d v Ep = (d Ep / d q) dv q, il en résulte que :
d Ep
=0
dq
La nature de l’équilibre est déterminée par l’allure de la fonction Ep(q) au voisinage de la valeur q 0 de
q à l’équilibre (Fig. 23.10).
399
Statique
Ωt
Oz
g
Ep
Ep
l
m
l
l
O
q1q 0 q2
O
q
a)
q 1 q0 q2
y
z
θ
K
y
m
l
2m
q
V
b)
F IG . 23.10.
x x
F IG . 23.11.
b) Exemple
Le système plan schématisé sur la figure 23.11 est constitué de trois masselottes reliées par des
tiges de même longueur l et de masses négligeables. La raideur du ressort est K et sa longueur à vide
l0. L’ensemble tourne uniformément à la vitesse V autour de l’axe vertical descendant Ox.
Exprimons l’énergie potentielle totale, somme de l’énergie potentielle de pesanteur, de l’énergie
potentielle élastique et de l’énergie potentielle centrifuge (cf. chapitre 20) :
Ep = −6mgl cos u +
1
V 2ml2 sin2 u
2
K (2l cos u − l0) + 2 × −
2
2
+ Cte
En dérivant par rapport à u, on obtient :
d Ep
= 2l sin u[3mg + Kl0 − l(2K + mV 2 ) cos u]
du
c Dunod – Toute reproduction non autorisée est un délit
Par conséquent, le système possède deux positions d’équilibre, u1 = 0 et u2 tel que :
cos u 2 =
3mg + Kl 0
l(2K + mV2)
Cette seconde position suppose la condition suivante :
3mg + Kl0 < l(2K + mV2)
soit
V Vc
avec
Vc =
3mg + K (l 0 − 2l)
ml
1/2
En calculant la dérivée seconde pour les deux positions d’équilibre, on trouve :
d2 Ep
d u2
1
= 2l[3mg + K (l0 − 2l) − mlV2 ]
et
d2 E p
d u2
= 2l 2(2K + mV2 ) sin2 u 2 > 0
2
La première position est stable pour V < V c, alors que la seconde l’est toujours pourvu qu’elle existe,
c’est-à-dire que V < Vc .
400
23. Statique
CONCLUSION
Retenons les conditions nécessaires de la statique :
(1) pour un corps ponctuel,
F = 0,
(2) pour un solide, S ex = 0 et Mex = 0,
(3) pour un ensemble de s solides, s équations vectorielles doubles telles que les précédentes,
(4) pour un système continu déformable, tel qu’un fil simple, une équation vectorielle pour chaque
élément.
Signalons la méthode des travaux virtuels très adaptée si on ne souhaite pas calculer les actions de
liaison. Dans ce contexte, le cas des systèmes matériels soumis à des liaisons parfaites et à des forces
qui dérivent d’une énergie potentielle peut être analysé simplement lorsque cette dernière ne dépend
que d’un seul paramètre q : il suffit de chercher les solutions qui réalisent la condition d E p/ d q = 0.
Suivant le signe positif ou négatif de la dérivée seconde, d2 E p / d q2, l’équilibre est respectivement
stable ou instable.
EXERCICES ET PROBLÈMES
P23– 1. Échelle contre un mur et sur un sol lisse
Une échelle AB, de masse m et de longueur l, est appuyée contre un mur de hauteur h
(Fig. 23.12). Les contacts en A et D étant dépourvus de frottement, on maintient l’échelle inclinée
d’un angle a par rapport à la verticale, grâce à un fil horizontal OA. Calculer les réactions des supports en A et D ainsi que la tension du fil.
B
F
T
A
D
h
α
g
C
A
θ
l
O
A
F IG . 23.12.
O
C
h
g
H
F IG . 23.13.
30 ◦
D B
Mg
E
F IG . 23.14.
P23– 2. Tableau accroché à un mur lisse
On désire suspendre un tableau, de hauteur h, sur un mur lisse, de telle sorte que le clou d’attache
F sur le mur soit au même niveau que le point le plus haut du tableau (Fig. 23.13).
1. Montrer que le point d’attache A à l’arrière du tableau doit être situé à une distance déterminée
du point le plus bas du tableau.
2. Évaluer, en fonction de la longueur l du fil et de h, l’angle que fait le tableau avec la verticale.
En déduire que l doit être compris entre deux valeurs que l’on exprimera en fonction de h.
P23– 3. Efforts aux liaisons d’une console constituée de deux tiges
On désire étudier les efforts aux liaisons dans la console représentée sur la figure 23.14. La barre
AB, de longueur l, est horizontale et la barre DE, de longueur 4l/3, fait un angle de 30 ◦ avec la
verticale. La barre horizontale supporte une charge uniformément répartie de valeur P. On néglige
le poids des barres. Calculer les efforts en A, D et E. Vérifier les résultats obtenus à l’aide d’une
construction géométrique.
401
Statique
P23– 4. Console mobile
Une console mobile ABC, ayant la forme d’un triangle rectangle isocèle (AB = AC = h), est
installée sur un tuyau de diamètre 2r, comme le montre la figure 23.15. Le facteur de frottement statique
entre la console et le tuyau est m s. On néglige le poids de la console devant la charge Mg placée sur AC.
Calculer la distance minimale x à l’axe du tuyau pour laquelle la charge mg peut être supportée sans
qu’il y ait glissement de la console le long du tuyau.
x
A
Mg
A
O
C
h
g
x
g
2α
h
H
B
A
B
B
F IG . 23.15.
F IG . 23.16.
P23– 5. Homme sur une échelle double
Une échelle double se compose de deux échelles simples AO et BO de même longueur l, de
même poids Mg, articulées sans frottement au sommet commun O (Fig. 23.16). Soit 2a, l’angle au
sommet des deux échelles et m le facteur de frottement avec le sol. Un homme H de poids mg monte
sur l’échelle AO à une distance x du sommet O. Montrer que si l’angle a augmente, c’est l’échelle
BO qui glissera la première. Discuter l’influence de x dans le cas particulier où m = M.
P23– 6. Stabilité de l’équilibre d’un disque
Un disque D, pouvant tourner sans frottement autour d’un axe horizontal, est soumis à l’action
d’un ressort et à celle d’une masselotte A (masse m), suspendue à l’extrémité d’une barre solidaire
passant par son axe (Fig. 23.17). Un fil inextensible relie une extrémité du ressort et le point de la barre
situé sur le pourtour du disque ; le fil ne glisse pas sur la poulie. Lorsque le ressort est au repos, la barre
est verticale et l’angle de rotation u est nul. Étudier la stabilité de l’équilibre du disque.
c Dunod – Toute reproduction non autorisée est un délit
O
l
A
y
θ
g
C1
g
θ1
r
K
C2
θ2
F
x
F IG . 23.17.
F IG . 23.18.
P23– 7. Équilibre d’un pendule double pesant (méthode des travaux virtuels)
Un pendule pesant double, constitué de deux tiges identiques, de masse m, de longueur l, est
écarté de sa position d’équilibre verticale, grâce à une force horizontale F appliquée à l’extrémité de
la tige inférieure (Fig. 23.18). Les liaisons aux deux articulations sont parfaites. Trouver les valeurs des
angles u1 et u 2 que font, avec la verticale descendante, ces deux tiges à l’équilibre.
402
23. Statique
P23– 8. Équilibre de divers solides géométriques
On suspend quatre solides homogènes, un demi-cercle matériel, un demi-disque matériel, une
demi-sphère matérielle et une demi-boule matérielle, de masse m et de rayon R .
1. On rappelle que les centres de masse sont situés sur l’axe de symétrie de ces solides à une
distance a du centre K du cercle, du disque, de la sphère ou de la boule qui vaut respectivement :
a=
2R
p
4R
3p
a=
a=
R
2
et a =
3R
8
Dans les quatre cas, calculer la valeur de l’angle a que fait la tangente au solide avec le plan horizontal
à l’équilibre. Commenter l’influence de R .
2. On fait osciller chaque solide autour de leur point de suspension. Trouver la période des petites
oscillations. Commenter l’influence de R .
P23– 9. Équilibre d’un solide en contact avec un plan horizontal
Un solide de révolution, constitué d’une base demi-sphérique, de rayon R , qui peut rouler sans
glisser sur un plan horizontal, est en équilibre sous l’action de son poids et des forces de contact.
1. Montrer que l’équilibre est stable si la coordonnée verticale z C du centre de masse C du solide
est inférieure à R .
2. On considère le solide homogène formé d’une demi-sphère de contact, creuse, surmontée d’un
cylindre creux de rayon R et de hauteur h . À quelle condition l’équilibre est-il stable ?
P23– 10. Équilibre d’une masselotte et point de Fermat d’un triangle
Une masselotte A (masse m ) est maintenue en équilibre par trois fils aux extrémités desquels on
a fixé trois masses ponctuelles m1 , m 2 et m 3 . Comme le montre la figure 23.19, ces trois fils passent
par trois orifices ponctuels A1 , A 2 , A3 que l’on a aménagés sur une table horizontale.
A3
A1
A
O
A2
m3
m1
g
x
m2
F IG . 23.19.
1. Établir la condition d’équilibre. Trouver la position d’équilibre dans les deux cas suivants.
a) L’une des masses ( m 3 ) est très inférieure aux deux autres.
b) L’une des masses ( m 3 ) est très supérieure aux deux autres.
Statique
403
2. Si les trois masses sont égales, la position d’équilibre est appelée point de Fermat ou point de
Torricelli.
a) Comment, d’après ce qui précède, peut-on définir un tel point ?
b) Montrer que ce point n’existe que si le triangle A 1A2 A3 n’a pas d’angle supérieur à 2p/3 .
3. a) Quelle est l’énergie potentielle d’un tel système, en fonction des cotes des trois masses, comptées le long d’un axe vertical descendant dont l’origine est prise dans le plan de la table ?
b) Que peut-on dire de la somme des distances AA i à l’équilibre ? En déduire une autre définition
du point de Fermat.
c Dunod – Toute reproduction non autorisée est un délit
4. Montrer que le point de Fermat d’un triangle peut être obtenu par l’intersection de trois cercles
circonscrits aux triangles équilatéraux A1A 3B2 , A1A2 B 3 et A 2 A3B1 , adossés aux trois côtés du triangle
A1A 2A 3 .
24
Lagrangien et hamiltonien
Le mouvement d’une particule et plus généralement d’un système matériel, peut être étudié à partir d’un formalisme dit analytique développé au XIXe siècle par le mathématicien italo-français A. Lagrange et le physicien écossais W. Hamilton. Ce formalisme s’appuie principalement sur deux fonctions
scalaires ayant la dimension physique d’une énergie : le lagrangien L et l’hamiltonien H. Son intérêt principal est, d’une part qu’il se prête mieux à l’extension de la mécanique aux autres domaines
de la physique (optique, physique quantique, etc.), et d’autre part qu’il permet de trouver plus facilement les grandeurs physiques qui se conservent dans le problème considéré.
I . — ÉQUATIONS DE LAGRANGE ET LAGRANGIEN
I . 1 . — Espace de configuration
Considérons un système matériel dont la position est déterminée par n variables indépendantes,
ou degrés de liberté, q1 , q2, . . . , q i , . . . , qn , notés {qi }. L’espace de configuration est l’espace à
n dimensions dans lequel la position du système est représentée par un point de coordonnées {q i }. Au
cours du temps, ce point décrit une trajectoire dans cet espace.
Pour un corps ponctuel évoluant dans l’espace physique habituel, l’espace de configuration s’identifie à cet espace (Fig. 24.1a). En revanche, il n’en est pas de même pour un pendule simple, dont la
position est caractérisée par l’angle u qu’il fait avec la verticale descendante (Fig. 24.1b), ou pour un
ensemble de trois particules évoluant sur un même axe Ox (Fig. 24.1c).
z
z
A
g
O
x
O
l
y
θ
a)
A
b)
A1
A2
A3
x
c)
F IG . 24.1.
Pour un système constitué de N particules, en mouvement quelconque les unes par rapport aux
autres, le nombre de degrés de liberté est n = 3N . L’espace de configuration a donc dans ce cas
3N dimensions.
405
Lagrangien et hamiltonien
Rappelons qu’un point de l’espace de configuration détermine la position du système et non son état
mécanique, lequel exige, en outre, la connaissance de l’ensemble des vitesses ou mieux des quantités de
mouvement.
I . 2 . — Équations de Lagrange
Considérons un système matériel en mouvement par rapport à un référentiel galiléen R , sous
l’action de forces extérieures et intérieures. Si le système dépend de n degrés de liberté, Lagrange a
montré que le mouvement satisfaisait aux n équations éponymes :
d
dt
∂E k
∂ q̇i
−
∂Ek
= Qi
∂q i
où Ek({q i , q̇i}, t) est l’énergie cinétique et Q i le coefficient de dq i , déplacement virtuel (à temps fixé)
de qi , dans l’expression du travail élémentaire des forces (cf. chapitre 23).
I . 3 . — Lagrangien
Si les coefficients Q i peuvent se mettre sous la forme suivante :
Qi = −
d
dt
∂Fp
∂ q̇i
+
∂Fp
∂qi
F p étant une fonction de {qi , q̇i} et t , alors les équations de Lagrange deviennent :
d
dt
∂L
∂ q̇i
−
∂L
= 0 où L({qi , q̇ i }, t) = Ek ({q i, q̇ i}, t) − F p({q i , q̇ i}, t)
∂q i
est le lagrangien L du système. Pour les systèmes dits naturels, définis par des contraintes ou liaisons
indépendantes du temps et des forces qui dérivent d’une énergie potentielle E p(qi ) ne dépendant que
des degrés de liberté, Fp se réduit à cette dernière énergie, d’où le lagrangien :
c Dunod – Toute reproduction non autorisée est un délit
L({q i, q̇i }) = Ek ({q i , q̇i }) − Ep ({qi })
Remarque : Cette définition n’est valable qu’en mécanique newtonienne et pour des particules chargées qui ne sont pas en interaction magnétique. En effet, le lagrangien associé au mouvement d’une particule chargée, plongée dans un champ électromagnétique, comporte un
terme supplémentaire :
L = Ek − E p + qv · A
q étant la charge électrique, v la vitesse et A le potentiel vecteur (cf. Électromagnétisme).
Exemples
(1) Lagrangien d’un oscillateur harmonique unidimensionnel
On a (cf. chapitre 10) :
1
1
1
1
Ek = mẋ 2
Ep = Kx2 d’où L(ẋ, x) = mẋ2 − Kx 2
2
2
2
2
x étant l’allongement du ressort de raideur K (Fig. 24.2a).
406
24. Lagrangien et hamiltonien
z
A
O
x
O
a)
b)
F IG . 24.2.
(2) Lagrangien d’un corps ponctuel en chute libre
Dans ce cas simple (cf. chapitre 4)
1
1
Ek = mz˙2
Ep = mgz d’où L( ż, z) = mż2 − mgz
2
2
z étant la coordonnée suivant la verticale ascendante (Fig. 24.2b).
(3) Lagrangien d’un pendule simple
On sait que (cf. chapitre 9) :
1
E k = ml 2u̇2
2
Ep = −mgl cos u
d’où
L(u̇, u) =
1 2 2
ml u̇ + mgl cos u
2
u désignant l’angle que fait le pendule avec la verticale descendante (Fig. 24.1b).
I . 4 . — Moments conjugués
Le moment conjugué p i , associé à la variable qi, est la quantité suivante :
pi =
∂L
∂ q̇i
Pour un corps ponctuel en chute libre (Fig. 24.2b), le moment conjugué est : p z = mż ; c’est donc sa
quantité de mouvement, d’où le nom de moment linéaire donné parfois à ce concept. Rappelons que le
mot moment vient du mot latin momentum qui signifie mouvement.
Pour un pendule simple (Fig. 24.1b), le moment conjugué est : pu = ml2 u̇ ; c’est donc son moment
cinétique, d’où le nom de moment angulaire donné parfois à ce concept.
I . 5 . — Équations de Lagrange de systèmes soumis à des forces conservatives
Les équations de Lagrange d’un système, soumis uniquement à des forces qui dérivent d’une énergie potentielle, sont les n équations différentielles suivantes du mouvement d’un système à n paramètres de configuration :
d pi
∂L
=
dt
∂q i
On pourrait démontrer ces équations à partir de la loi fondamentale de la dynamique appliquée à chacun
des corpuscules constituant le système, ce qui présente un intérêt limité. La démonstration s’appuie sur
les notions de déplacement virtuel et de travail virtuel d’une force (cf. chapitre 23).
Dans cette présentation, nous admettons les équations de Lagrange comme nous avons admis la loi
fondamentale de la dynamique pour dvelopper la mécanique sous sa forme vectorielle.
407
Lagrangien et hamiltonien
Exemples
(1) Oscillateur harmonique unidimensionnel
Comme L = m ẋ2 /2 − Kx2 /2, il vient p x = m ẋ, d’où (Fig. 24.2a) :
d
(mẋ) = −Kx
dt
K
m
et ẍ + v20x = 0 avec v 20 =
(2) Pendule simple
Là, puisque L = ml 2u̇ 2/2 + mgl cos u, pu = ml 2u̇, on a (Fig. 24.1b) :
d
(ml 2u̇) = −mgl sin u
dt
et
ü + v20 sin u = 0 avec
v20 =
g
l
(3) Pendule pesant
Dans ce cas, le lagrangien s’écrit : L = I u̇ 2/2 + mgl cos u, où I désigne le moment d’inertie
par rapport à l’axe de rotation, l la distance du centre de masse C à l’axe Oz et −mgl cos u l’nergie
potentielle (Fig. 24.3a). Il en résulte que pu = I u̇ s’identifie au moment cinétique, d’où :
d
(I u̇) = −mgl sin u
dt
soit
ü + v20 sin u = 0 avec
v20 =
mgl
I
K1
A2
K2
Oz
l
g
C
A1
K12
θ
x1
x
a)
x2
b)
F IG . 24.3.
c Dunod – Toute reproduction non autorisée est un délit
(4) Oscillateurs élastiques en interaction
L’énergie cinétique des deux pendules élastique horizontaux a pour expression (Fig. 24.3b) :
1
1
Ek = m1 ẋ12 + m2ẋ 22
2
2
x1 et x 2 étant les coordonnées des masselottes par rapport à leurs positions de repos. Quant à l’énergie
potentielle d’origine élastique, elle s’écrit :
Ep(x1, x2) =
1
1
1
K1x12 + K2 x22 + K 12 (x2 − x1 ) 2
2
2
2
d’où le lagrangien :
1
1
1
1
1
m1 ẋ21 + m 2ẋ22 − K1x21 − K2 x22 − K 12(x2 − x1)2
2
2
2
2
2
Il en résulte les deux moments conjugués et les deux équations de Lagrange correspondantes :
∂L
∂L
∂L
∂L
p1 =
= m1 ẋ1
p2 =
= m2 ẋ 2 et ṗ1 =
ṗ2 =
∂x1
∂x2
∂ ẋ1
∂ẋ 2
soit, en explicitant les deux dernières équations :
L=
m1 ẍ1 = −K1 x1 + K12 (x2 − x1)
et m2 ẍ2 = −K 2 x2 + K12(x 1 − x2)
Le mouvement de ces oscillateurs élastiques couplés sera analysé en détail ultérieurement (cf. chapitre 27).
408
24. Lagrangien et hamiltonien
I . 6 . — Principe d’Hamilton
Les n équations de Lagrange auxquelles satisfait un système matériel conservatif à n degrés de liberté peuvent être formulées de façon variationnelle, comme l’est le principe de Fermat en optique géométrique (cf. Optique). Cette formulation est connue en mécanique sous le nom de principe d’Hamilton.
Énoncé
Entre deux instants t 1 et t 2, le mouvement d’un système matériel est celui qui réalise une valeur
stationnaire de l’action S :
dS = 0 avec S =
t2
t1
L(qi, q̇i, t) d t
Le mot stationnaire a la même signification que dans le principe de Fermat : lorsqu’on calcule l’intégrale
S le long de plusieurs chemins voisins pour lesquels les instants t1 et t 2 sont fixés, la trajectoire
effectivement suivi par le systme est celle qui réalise soit un minimum de S soit un maximum.
Comme l’action S est minimale pour toute portion suffisamment petite de la trajectoire, ce principe
est aussi connu sous le nom de principe de moindre action ou principe de Maupertuis.
L’avantage de cette présentation, qui est équivalente aux précédentes vectorielle ou lagangienne,
est précisément d’établir des liens étroits entre les différentes disciplines de la physique, ici entre la
mécanique newtonienne et l’optique géométrique (cf. Optique).
II . — HAMILTONIEN ET ÉQUATIONS CANONIQUES
II . 1 . — Espace des phases
Dans la théorie des équations de Lagrange, les variables étaient les n degrés de liberté ou coordonnées du point représentatif du système matériel dans l’espace de configuration. Les n équations
différentielles du deuxième ordre relatives à ces variables formaient alors les équations du mouvement.
Dans la théorie d’Hamilton, on s’intéresse plutôt à l’état mécanique du système, lequel dépend de
2n variables indépendantes : les n coordonnées {q i} de l’espace de configuration et les n moments
conjugués { pi = ∂L/∂ q̇i }.
On appelle espace des phases l’espace à 2n dimensions dans lequel un point figuratif représente
l’état mécanique du système. Ce nombre de variables coïncide évidemment avec le nombre des conditions initiales qui caractérisent l’état initial du système : généralement n paramètres de position et n
paramètres de quantité de mouvement.
Exemples :
(1) Oscillateur harmonique
Là, q 1 = x et p1 = mẋ (Fig. 24.2a). Ces variables q1 et p 1 = mẋ sont reliées par l’équation de
conservation de l’énergie mécanique :
p2
Kx2
p2x
Kx2
Em = x +
+
= Cte soit
=1
2m
2
2mE m
2Em
Dans l’espace des phases, la trajectoire décrite par le point représentatif de l’état mécanique est donc
une ellipse dont les demi-axes (2mEm )1/2 et (2Em/K) 1/2 , qui dépendent de l’énergie, représentent les
valeurs maximales xm et pm de l’élongation et de la quantité de mouvement. Il est commode de récrire
l’équation précédente en faisant apparaître ces quantités
px
pm
2
+
x
xm
2
=1
avec p m = (2mE m) 1/2
et xm =
2Em
K
1/2
409
Lagrangien et hamiltonien
px
pz
E m > Em
pm
Em
0
h
xm
0
x
z
b)
a)
F IG . 24.4.
(2) Chute libre
Les variables q 1 = z et p 1 = m ż sont reliées par l’équation de conservation de l’énergie mécanique (Fig. 24.4b) :
p2
E m = z + mgz = Cte = mgh
2m
si initialement pz = 0 et z = h. Ainsi, dans l’espace des phases, la courbe décrite par le point représentant l’état mécanique du système est la portion de parabole pour laquelle p z < 0. Notons que la branche
positive de la parabole ( pz > 0) correspond à la trajectoire décrite réversiblement, c’est-à-dire en changeant le signe du paramètre d’évolution : le corps ponctuel remonte l’axe vertical à partir de sa position
la plus basse avec une vitesse initiale non nulle jusqu’à la hauteur h où sa vitesse est nulle (Fig. 24.4b).
II . 2 . — Hamiltonien
a) Définition
c Dunod – Toute reproduction non autorisée est un délit
Pour un système matériel en mouvement par rapport à un référentiel galiléen R, sous l’action
de forces extérieures et intérieures qui dérivent d’une énergie potentielle E p({q i}, t), l’hamiltonien
est la fonction suivante, dépendant des paramètres de position {qi } , des moments conjugués {p i } et
éventuellement du temps :
H=
i
pi q̇i − L
Cette transformation est connue sous le nom de transformation de Legendre. Elle permet de passer du
lagrangien, fonction associée aux variables ({qi }, {q̇i }, t), à l’hamiltonien, fonction d’état des variables
({qi }, {pi}, t). En effet :
∂L
∂L
∂L
dL =
d qi +
d q̇i +
dt
∂q
q̇
∂t
∂
i
i
i
et
dH = d
i
pi q̇i − d L =
i
(pi d q̇i + q̇i d pi ) −
i
∂L
∂L
∂L
d qi +
d q̇i −
dt
∂ q̇i
∂qi
∂t
soit, puisque p i = ∂L/∂ q̇i et ṗi = ∂L/∂qi :
dH =
i
(q̇i d p i − ṗ i d qi ) −
∂L
dt
∂t
410
24. Lagrangien et hamiltonien
b) Équations canoniques d’Hamilton
Évaluons, de deux façons, la différentielle de la fonction d’Hamilton. En considérant H comme
une fonction des 2n variables ({qi , pi }) et du temps t, on a :
∂H
∂H
∂H
dH =
d qi +
d pi +
dt
∂qi
∂pi
∂t
i
Si l’on identifie H à l’expression établie précédemment :
dH =
on en déduit :
i
∂H
d qi
=
∂pi
dt
( q̇i d pi − ṗi d q i ) −
∂H
d pi
=−
∂qi
dt
∂L
dt
∂t
et
∂H
∂L
=−
∂t
∂t
Les 2n premières équations du premier ordre en q i et pi sont les équations canoniques du mouvement. On voit, en outre, que si le lagrangien dépend explicitement du temps, il en est de même pour
l’hamiltonien.
c) Cas des systèmes naturels
Un système est dit naturel si l’énergie potentielle et les contraintes qui lui sont imposées ne dépendent pas explicitement du temps. Il en résulte que les coordonnées d’un point A quelconque du système ne sont fonctions que des paramètres de configuration {q i} , lesquels sont indépendants les uns
des autres : OA({qi }). On en déduit l’expression de la vitesse de A :
d OA
∂OA d q i
∂OA
vA =
q̇i
=
=
dt
dt
∂q i
∂qi
i
i
et la forme quadratique suivante de l’énergie cinétique :
∂OA
1
m Av 2A =
Ek =
·
∂q
2
i
i
A
A
j
en posant :
∂OA
aij =
·
∂q i
A
∂OA
∂qj
q̇i q̇j =
aij q̇i q̇ j
i
j
∂OA
∂qj
L’énergie cinétique ne dépend donc pas explicitement du temps. Comme en outre E p = Ep({qi }), il
vient :
∂L
∂E k
=
=
2a ijq̇j et
pi =
pi q̇i = 2
aij q̇i q̇j = 2E k
∂ q̇i
∂ q̇i
j
i
i
j
d’où :
H=
i
pi q̇i − L = Ek + E p = E
L’hamiltonien d’un système naturel s’identifie à son énergie.
Exemples
1) Pour un oscillateur harmonique élastique à une dimension :
1
1
L = m ẋ2 − Kx 2 d’où px = m ẋ
2
2
Il en résulte l’équation bien connue du mouvement :
et H = pxẋ − L =
∂H
d px
=−
= −Kx
dt
∂x
p2x
1
+ Kx2
2m 2
411
Lagrangien et hamiltonien
2) Pour une particule se déplaçant dans un plan sous l’action d’une force centrale qui dérive d’une
énergie potentielle Ep(r). On a, avec les notations habituelles :
1
L = m(ṙ 2 + r2u̇ 2) − E p(r)
2
On en déduit l’hamiltonien :
d’où
1
H=
2m
pr =
∂L
= m ṙ
∂ ṙ
p2u
r2
+ E p (r)
p2r +
et pu =
∂L
= mr2 u̇
∂u̇
et les équations du mouvement :
pr
pu
p 2u
∂E p
ṗ
ṗ
u̇ =
=
−
+
=
0
r
u
m
mr2
∂r
mr3
On retrouve la conservation du moment cinétique (pu = Cte) et l’équation du mouvement radial.
ṙ =
II . 3 . — Conservation de l’énergie et des moments conjugués
a) Conservation de l’énergie
Pour un système matériel naturel, en mouvement par rapport à un référentiel galiléen, l’hamiltonien
H ne dépend pas explicitement du temps. On en déduit, en tenant compte des équations canoniques :
∂H d qi
∂H d p i
∂H
∂L
dH
=
+
+
=−
= 0 d’où H = Cte
dt
∂qi d t
∂pi d t
∂t
∂t
i
L’invariance par rapport au temps de l’hamiltonien implique la conservation de l’hamiltonien et donc
de l’énergie si le système est naturel. On dit que, pour de tels systèmes, le temps est homogène
b) Conservation des moments conjugués
c Dunod – Toute reproduction non autorisée est un délit
Si l’une des variables q i de l’espace de configuration n’apparaît pas explicitement dans l’hamiltonien, le lagrangien ou l’énergie potentielle, le moment conjugué p i associé est une constante du mouvement. En effet, il vient, d’après les équations de Lagrange :
p i = Cte
Ainsi, à une variable cachée de l’espace de configuration correspond une constante du mouvement.
Dans l’exemple de la particule en mouvement sous l’action d’une force centrale, l’énergie potentielle Ep (r) ne dépend pas de la variable angulaire u ; le moment conjugué p u, qui s’identifie au moment cinétique de la particule, est donc une constante.
Plus généralement, si l’hamiltonien est invariant par rapport aux trois coordonnées cartésiennes
x, y, z du centre de masse C, c’est-à-dire par translation, les moments conjugués p x, p y , pz sont
des constantes. L’invariance de l’hamiltonien par translation implique la conservation de la quantité de
mouvement du système. On dit que l’espace est homogène.
De façon analogue, si l’hamiltonien est invariant par rapport aux trois coordonnées angulaires dans
le mouvement autour du centre de masse, c’est-à-dire par rotation, les trois moments conjugués L1 , L2 ,
L 3 sont des constantes. L’invariance de l’hamiltonien par rotation implique la conservation du moment
cinétique du système. On dit que l’espace est isotrope.
412
24. Lagrangien et hamiltonien
III . — LAGRANGIEN ET HAMILTONIEN D’UNE PARTICULE CHARGÉE
III . 1 . — Lagrangien d’une particule chargée
Dans le cas important en physique d’une particule chargée plongée dans un champ électromagnétique (E, B), montrons que l’expression suivante du lagrangien :
L = E k − qV + qv · A
dans laquelle q est la charge et (V, A) désigne le potentiel électromagnétique, est compatible avec la
loi fondamentale de la mécanique et avec l’expression de la force de Lorentz (cf. Électromagnétisme) :
dp
= q(E + v × B)
dt
Suivant la coordonnée x, le moment conjugué Px s’écrit :
∂L
= mẋ + qAx = px + qA x = P x
∂ẋ
Ainsi le moment conjugué P d’une particule chargée dans un champ électromagnétique ne s’identifie
pas à sa quantité de mouvement p = mv :
P = p + qA
L’équation de Lagrange associée à x donne :
d Px
∂L
=
dt
∂x
d px
d Ax
∂V
∂A x
∂Ay
∂Az
+q
= −q
+ q vx
+ vy
+ vz
dt
dt
∂x
∂x
∂x
∂x
soit
Comme A est une fonction de (x, y, z, t), on a aussi :
∂Ax
∂Ax d x ∂Ax d y
∂Ax d z
∂Ax
∂Ax
∂Ax
∂Ax
d Ax
=
+
+
+
=
+ vx
+ vy
+ vz
∂t
∂x d t
∂y d t
∂z d t
∂t
∂x
∂y
∂z
dt
Il en résulte que :
d px
∂V
∂Ax
∂Ay
∂Ax
= −q
−q
+ qvy
−
dt
∂x
∂t
∂x
∂y
+ qvx
∂Az ∂Ax
−
∂x
∂z
La relation entre le champ et le potentiel électromagnétiques étant (cf. Électromagnétisme) :
E = − grad V −
∂A
∂t
et
B = rot A
les composantes du champ électromagnétique sont les suivantes :
−
∂V
∂A x
−
∂x
∂t
−
∂V
∂A y
−
∂y
∂t
−
∂V
∂A z
−
∂z
∂t
∂Az
∂A y
−
∂y
∂z
et
∂Ax ∂A z
−
∂z
∂x
∂Ay ∂A x
−
∂x
∂y
413
Lagrangien et hamiltonien
La loi fondamentale de la dynamique d p/ d t = q(E + v × B) donne alors, comme première composante :
∂V
∂Ax
∂Ay ∂Ax
∂Ax ∂Az
d px
= −q
−q
+ qvy
− qv z
−
−
dt
∂x
∂t
∂x
∂y
∂z
∂x
On retrouve bien le même résultat pour d p x/ d t que précédemment. Retenons donc l’expression suivante du lagrangien d’une particule chargée, en mécanique de Newton :
L=
1
mv 2 − qV + qv · A
2
III . 2 . — Hamiltonien d’une particule chargée
Procédons à la transformation de Legendre suivante : H = v · P − L. Il vient :
H = v · (p + qA) − E k + qV − qv · A = v · p − Ek + qV = E k + qV
puisque
v · p = 2Ek
Ainsi, l’hamiltonien d’une particule chargée s’identifie à son énergie totale :
H=
(P − qA)2
p2
+ qV =
+ qV
2m
2m
Remarque : En relativité restreinte, le lagrangien et l’hamiltonien ont pour expressions respectives (cf.
Relativité et invariance) :
L=
mc2
− qV + qV · A et H = gmc2 + qV
g
IV . — DÉTERMINISME, IMPRÉDICTIBILITÉ ET CHAOS
c Dunod – Toute reproduction non autorisée est un délit
IV . 1 . — Systèmes intégrables
On dit qu’un système dissipatif ou non est intégrable si le nombre de degrés de liberté est égal au
nombre de constantes du mouvement.
Par exemple, la chute des corps dans le vide est intégrable en raison de la conservation de l’énergie
(cf. chapitre 4), le mouvement parfait d’un solide autour d’un axe aussi car l’énergie se conserve (cf.
chapitre 25). Le mouvement de Kepler dans le problème à deux corps, à deux degrés de liberté dans
le référentiel du centre de masse, est intégrable, lui aussi, car l’énergie mécanique se conserve ainsi
que le moment cinétique selon l’axe perpendiculaire au plan du mouvement (cf. chapitre 13). Quant au
mouvement de la toupie symétrique, il est intégrable, car l’énergie mécanique se conserve, le moment
cinétique selon l’axe vertical Oz et le moment cinétique selon l’axe Oz de la toupie (cf. chapitre 26).
Dans certains cas, comme la Machine d’Atwood Dansante (MAD), (cf. chapitre 20), le système
n’est a priori pas intégrable, car le système a deux degrés de liberté et une seule constante d’intégration ; cependant, si les poulies sont de rayons et de masses nuls et le rapport des deux masses égal à trois,
le système devient intégrable, ce qui correspond à l’émergence d’une symétrie cachée non encore identifiée.
414
24. Lagrangien et hamiltonien
IV . 2 . — Déterminisme
a) Définition
On dit qu’un système mécanique est déterministe si la connaissance, à un instant, des forces qui
agissent sur lui et de son état, permet de déterminer son état à tout autre instant.
L’état donné est le plus souvent l’état initial, caractérisé par les valeurs initiales des degrés de liberté
et des moments conjugués, mais ce n’est pas nécessaire ; la connaissance de l’état final permettrait de
restituer les états antérieurs. Aussi peut-on dire que le déterminisme implique que tout soit connu : le
passé, le présent et le futur.
Le déterminisme rigoureux, qui donnerait à la science un caractère totalement prédictif, fut remarqué pour la première fois par P. Laplace, en 1814, dans les termes suivants :
« Nous devons envisager l’état présent de l’Univers comme l’effet de son état antérieur, et comme
la cause de celui qui va suivre. Une intelligence qui, pour un instant donné, connaîtrait toutes les forces
dont la nature est animée et la situation respective des êtres qui la composent, si d’ailleurs elle était assez
vaste pour soumettre ces données à l’analyse, embrasserait dans la même formule les mouvements des
plus grands corps de l’Univers et ceux du plus léger atome : rien ne serait incertain pour elle, et l’avenir,
comme le passé, serait présent à ses yeux. »
Il n’est pas inutile de souligner les hypothèses restrictives (en italique), nécessaires au déterminisme, rappelées par l’auteur lui-même.
b) Exemple
Considérons un pendule simple évoluant, sans frottement, dans le champ de pesanteur (Fig. 24.1b).
L’hamiltonien, qui s’identifie dans ce cas à l’énergie mécanique, s’écrit :
H=
p2u
− mgl cos u = E m d’où
2ml2
p u = [2ml2 (Em + mgl cos u)]1/2
On sait que deux cas peuvent se produire (cf. chapitre 9) :
i) −mgl < E m < mgl
Le pendule oscille entre les valeurs opposées, u 1 et −u1 , telles que u1 = arccos(−Em /mgl), ce
qui traduit l’annulation de pu.
ii) E m mgl
Le moment conjugué p u est une fonction périodique de u, lequel ne s’annule jamais. Le mouvement du pendule est révolutif.
Dans l’espace des phases, la trajectoire du point représentatif du système est celle représentée sur
la figure 24.5. On y distingue aisément deux zones : l’une pour laquelle le mouvement est oscillatoire,
l’autre pour laquelle le mouvement est révolutif. On voit que les conditions initiales permettent de
déterminer sans ambiguïté le type de mouvement du pendule dans l’espace des phases : mouvement
oscillatoire ou mouvement révolutif.
IV . 3 . — Imprédictibilité et chaos
a) Sensibilité aux conditions initiales
Pour la plupart des systèmes dynamiques intéressants en physique, le nombre de constantes du
mouvement est inférieur au nombre de degrés de liberté. Cela se traduit, dans l’espace des phases,
par une complexité des courbes obtenues ; on constate une imbrication des zones correspondant aux
différents types de mouvement.
415
Lagrangien et hamiltonien
.
ml 2θ
p
Em > mgl
Δp
Em = mgl
-π
O
π
θ
Δq
0
q
Em < mgl
F IG . 24.5.
F IG . 24.6.
Par exemple, considérons le système constitué par une pièce de monnaie lancée en l’air et terminant sa chute sur une table. Cette pièce est assimilable à un solide ayant la forme d’un cylindre plat sur
les faces duquel sont inscrits des signes distincts, pile et face. Son mouvement a six degrés de liberté
et quatre constantes du mouvement : l’énergie mécanique, somme de l’énergie cinétique et de l’énergie potentielle de pesanteur, et les trois composantes du moment cinétique au centre de masse (cf. chapitre 26) ; dans l’espace des phases, les points représentatifs des deux types de mouvement pile ou face,
au moment où la pièce atteint la table, ne se trouvent pas dans des zones bien séparées ; au contraire,
ils semblent disposés au hasard. On comprend alors qu’une légère imprécision sur la donnée des conditions initiales ait une grande influence sur le résultat obtenu au point de rendre l’analyse imprédictive :
bien que le système soit déterministe, des conditions initiales très proches peuvent donner des résultats qualitativement très différents.
Sur la figure 24.6, on a représenté à l’aide d’une croix et d’un point, dans l’espace des phases,
deux types de mouvements possibles de ce système dynamique. Pour des conditions initiales connues
même avec une excellente précision, il est impossible de prévoir la nature du mouvement, car les points
représentant les deux types de mouvements possibles se trouvent à l’intérieur du domaine d’incertitude
Dq Dp. Il apparaît donc dans ce type de mouvement une imprédictibilité expérimentale qui nécessite,
comme le disait déjà H. Poincaré en 1892, des méthodes nouvelles d’analyse de nature qualitative.
c Dunod – Toute reproduction non autorisée est un délit
De tels systèmes, déterministes mais imprédictifs car sensibles aux conditions initiales, sont dits
chaotiques.
b) Sources de chaos
De façon générale, les sources de chaos sont attribuées aux termes non linéaires dans les équations
qui régissent le mouvement. Ces non-linéarités sont, par exemple, le frottement visqueux proportionnel
au carré de la vitesse, les forces associées au développement à l’ordre trois de l’énergie potentielle autour
d’une position d’équilibre, les forces d’inertie d’entraînement et de Coriolis, l’accélération convective
d’un fluide et les forces de gravitation en 1/r2, lesquelles sont à l’origine de l’instabilité des systèmes
en Astrophysique.
Dans l’espace des phases, ces non-linéarités provoquent des modifications des courbes d’évolution
des systèmes linéaires correspondants (cf. chapitre 10) ; ces courbes présentent des points de convergence nouveaux appelés attracteurs étranges.
Depuis quelques années, l’étude du comportement chaotique des systèmes dynamiques complexes
est en plein essor, au point d’être à l’origine d’un renouveau de la mécanique. Ce développement, initié
par Poincaré au début du XXe siècle, doit être attribué en partie aux grandes possibilités offertes par
la simulation numérique sur ordinateur. Enrichi par l’analyse thermodynamique du rôle de la création
416
24. Lagrangien et hamiltonien
d’entropie dans de tels systèmes, il peut déboucher sur une nouvelle interprétation des comportements
de systèmes aussi complexes que les êtres vivants (cf. Thermodynamique).
Remarque : En électronique, les composants actifs, tels que l’amplificateur opérationnel avec sa source
auxiliaire d’énergie, introduisent aussi des termes non linéaires dans les équations des
circuits. De même en optique, les lasers sont des composants non linéaires qui peuvent
par irradiation de matériaux provoquer des comportements chaotiques (cf. Optique).
CONCLUSION
Les équations du mouvement des systèmes naturels, à n degrés de liberté {q i }, dont les forces
dérivent d’une énergie potentielle, peuvent être obtenues par des méthodes analytiques.
(1) La première est la méthode des n équations de Lagrange où les variables sont les n degrés de
liberté {qi }. Si :
L = E k − Ep
est le lagrangien, fonction d’état du système des variables {qi }, { q̇i } et du temps t, on a :
∂L
d pi
=
dt
∂qi
où
pi =
∂L
∂ q̇i
est le moment conjugué de la variable qi .
(2) La deuxième est la méthode des 2n équations canoniques de Hamilton où les variables sont le
temps t, les n degrés de liberté {qi } et les n moments conjugués {p i }. Si :
H=
i
pi q̇i − L
est l’hamiltonien, fonction d’état des variables {qi }, {pi } et du temps t, on a :
∂H
d qi
=
dt
∂pi
et
∂H
d pi
=−
dt
∂q i
Dans les systèmes naturels, les plus importants en physique, l’hamiltonien du système s’identifie à son
énergie.
La relation entre les lois de conservation et les propriétés d’invariance du système doit être soulignée.
i) L’énergie se conserve si le temps n’apparaît pas explicitement dans l’expression de l’hamiltonien : le temps est homogène.
ii) Le moment conjugué associé à une variable spatiale se conserve si cette dernière n’apparaît
pas explicitement dans l’expression de l’hamiltonien ; s’il en est ainsi pour les trois coordonnées
cartésiennes, l’espace est uniforme.
iii) Le moment conjugué associé à une variable angulaire se conserve si cette dernière n’apparaît
pas explicitement dans l’expression de l’hamiltonien ; s’il en est ainsi pour les trois coordonnées
angulaires de l’espace physique, l’espace est dit isotrope.
Enfin, soulignons la différence entre le déterminisme des lois et l’imprédictibilité du comportement
des systèmes complexes. Une grande sensibilité aux conditions initiales, du fait de la présence de fortes
non-linéarités dans les équations du mouvement, rend ces systèmes imprédictibles voire chaotiques.
417
Lagrangien et hamiltonien
EXERCICES ET PROBLÈMES
P24– 1. Pendule elliptique constitué de deux masselottes
Un solide est constitué d’une tige, homogène, de longueur l, de masse m, aux extrémités de laquelle sont fixées deux masselottes A1 et A2 , de masses respectives m 1 et m2 (Fig. 24.7). L’extrémité
A1 glisse sans frottement le long de l’axe horizontal Ox d’un référentiel terrestre R = Oxyz et la tige
évolue dans le plan vertical Oxy.
1. Exprimer, en fonction de x = OA 1 et u = (−Oy, A1 A2 ), l’énergie cinétique, l’énergie potentielle, le lagrangien et les moments conjugués px et pu .
2. Trouver les équations différentielles du mouvement.
3. En déduire la nature des petits mouvements, sachant qu’à l’instant initial, x = 0, u = u 0, ẋ = 0
et u̇ = 0.
y
O
g
x
g
O
A1
O
x
A1
x
g
A3
l
l
θ
θ
A2
F IG . 24.7.
x
O1
F IG . 24.8.
A
2m
m
K
A2 m
F IG . 24.9.
P24– 2. Pendule simple excité par déplacement horizontal
L’extrémité O 1 d’un pendule simple, de longueur l et de masse m, a un mouvement oscillatoire
horizontal de la forme : x1(t) = dm cos(vt) (Fig. 24.8).
c Dunod – Toute reproduction non autorisée est un délit
1. Établir l’équation différentielle du mouvement du pendule. On posera v 20 = g/l.
2. Étudier le cas des petits mouvements en u.
P24– 3. Oscillateur sur une poulie
On considère le système de la figure 24.9 constitué de trois masselottes A 1 , A 2 et A3 , de masses
respectives m, m, 2m, reliées par un ressort de raideur K et par un fil inextensible. Les paramètres de
configuration sont la position x de A 1, suivant la verticale descendante, et l’allongement y du ressort.
La poulie, de rayon r, a une masse négligeable.
1. Donner les expressions des moments conjugués.
2. Trouver l’hamiltonien du système.
3. En déduire les équations différentielles et la nature du mouvement, sachant qu’initialement
x = 0 , y = 2mg/K , ẋ = 0 et ẏ = 0 . On posera v 21 = 4K/(3m).
418
24. Lagrangien et hamiltonien
P24– 4. Petites oscillations d’un cerceau lesté
1. Retrouver, à l’aide des équations de Lagrange, l’équation différentielle des petits mouvements
du cerceau lesté représenté sur la figure 18.12.
2. Même question en utilisant les équations canoniques.
P24– 5. Équations canoniques du problème de Kepler
Un corpuscule, de masse m, est soumis à la force dérivant de l’énergie potentielle E p = K /r.
1. Trouver l’expression de l’hamiltonien en fonction des variables (r, u) et des moments conjugués
(pr, p u ).
2. En déduire les équations du mouvement.
P24– 6. Pendule double
À l’extrémité A d’un pendule simple OA (masse m, longueur l), on accroche un deuxième
pendule simple AB identique au premier (Fig. 24.10). On désigne par u1 et u2 les angles que font
avec la verticale descendante respectivement OA et AB.
1. Établir les équations différentielles du mouvement.
2. Que deviennent ces équations dans le cas des petits angles ?
O
l
g
θ1
A1
A2
l
θ2
x1
x2
A
g
A2
x2
A3
x3
B
a)
F IG . 24.10.
A4 x x 1
4
b)
F IG . 24.11.
P24– 7. Machines d’Atwood simple et double
1. Une machine d’Atwood simple est constituée de deux masselottes A 1 et A2 , de masses m1 et
m2, reliées par un fil inextensible (Fig. 24.11a). Établir l’équation différentielle et la nature du mouvement, sachant que la masse de la poulie est négligeable.
2. On remplace la masselotte A 1 par une machine d’Atwood comme le montre la figure 24.11b,
les masses des poulies étant négligeables. Trouver les équations différentielles du mouvement.
P24– 8. Modélisation de la molécule de dioxyde de carbone
On représente les trois atomes de la molécule symétrique de dioxyde de carbone par trois points
matériels alignés, de masses respectives m1, m2 et m 1. Ces points se déplacent sous l’action des
forces interatomiques que l’on peut représenter par deux ressorts identiques de raideur K. On désigne
par x1, x2, x3 les coordonnées de position par rapport aux positions d’équilibre, dans le référentiel du
centre de masse R∗ .
419
Lagrangien et hamiltonien
1. Établir les équations différentielles du mouvement à l’aide du lagrangien du système.
2. Quelle équation relie les coordonnées x1 , x2 , x3 , sachant que les atomes de la molécule peuvent
être simultanément au repos ?
3. En déduire les deux équations différentielles du mouvement.
P24– 9. Système de poulies
On réalise le système de poulies identiques et de masselottes représenté sur la figure 24.12. Les
centres des poulies P1 et P2 sont fixes, alors que le centre de la poulie P3 est mobile. Les poulies,
toutes de rayon r, ont une masse négligeable et les masses suspendues sont m 1, m 2 et m 3 . En outre
le fil est inextensible.
1. Exprimer le lagrangien du système en fonction des coordonnées x 1 et x2 des masselottes A1
et A2 comptées à partir du bâti reliant les centres des poulies 1 et 2.
2. En déduire la valeur des accélérations de A 1 , A 2 et A 3.
S
B
P3
P1
g
z z
g
θ
P2
A2
O
A1
Ω
y
Moteur
A3
F IG . 24.12.
F IG . 24.13.
c Dunod – Toute reproduction non autorisée est un délit
P24– 10. Lagrangien et énergie d’un système articulé en rotation uniforme
Un système déformable est constitué de quatre tiges identiques (masse m, longueur l) formant
un losange articulé (Fig. 24.13). Il est astreint à tourner autour d’un axe vertical ascendant Oz grâce à
un moteur qui lui impose une vitesse angulaire de rotation constante V . L’extrémité supérieure B du
losange est reliée à un ressort de raideur K = mg/l et de longueur à vide l 0 = l/2 ; g est l’intensité
du champ de pesanteur. L’autre extrémité du ressort est fixée au point F de l’axe Oz à la distance
L = 9l/2 de O.
1. Montrer que l’énergie cinétique du système dans le référentiel tournant R = Ox y z a pour
expression : Ek = Ju̇2 (1 + 3 sin2 u)/2, u étant l’angle que font les tiges avec l’axe vertical et J une
quantité que l’on exprimera en fonction de m et l.
2. L’énergie potentielle du système dans R se met sous la forme :
E p = 4mgl 1 − cos u −
sin 2 u
2
1+
V2
V 20
Calculer V2 en fonction de g et l ; en déduire le lagrangien et l’énergie du système dans R .
420
24. Lagrangien et hamiltonien
P24– 11. Bille creuse dans un guide diédrique
Retrouver, à l’aide des équations de Lagrange, l’équation différentielle du mouvement d’une bille
creuse dans un guide diédrique en rotation uniforme (Fig. 20.23).
P24– 12. Invariant d’un pendule simple
Un pendule simple, constitué d’une masselotte A (masse m = 150 g ), accrochée à l’extrémité
d’un fil (longueur OA = l = 25 cm ), oscille dans un plan vertical autour de sa position d’équilibre, en
s’écartant peu de cette dernière.
1. Exprimer, en fonction de l’angle w , que fait la direction du pendule avec la verticale descendante
Ox et de sa dérivée ẇ , l’énergie cinétique E k et l’énergie potentielle de pesanteur E p , l’origine de cette
dernière étant prise à la position d’équilibre.
2. Quelle est la constante du mouvement du pendule en l’absence de frottement ? Calculer la pulsation v0 , la fréquence f 0 et la période T0 du mouvement oscillatoire.
3. a) Quelle est l’expression du moment cinétique de A en O ?
b) Montrer que la trajectoire du pendule dans l’espace des phases (w, L z ) est une ellipse dont on
exprimera les axes a et b en fonction de l’énergie mécanique Em du pendule et des caractéristiques
de ce dernier.
c) Exprimer l’aire de l’ellipse en fonction de E m et T0 .
4. On tire sur le fil en faisant varier lentement sa longueur (Fig. 24.14), de sorte que d l/ d t l/T 0 .
a) Exprimer la variation élémentaire d’énergie lorsque l varie de d l . En déduire qu’en moyenne,
on a :
d Em d T0
+
=0
Em
T0
b) L’énergie et la période ne se conservent pas si on tire lentement sur le fil, mais une autre grandeur
se conserve. Laquelle ? Comparer cet invariant à l’aire de l’ellipse. Quelle est la dimension physique de
cet invariant ?
c) Quel est le rapport entre les amplitudes du mouvement oscillant lorsque la longueur du fil passe
progressivement de li = 25 cm à l f = 12, 5 cm ?
d) Cet invariant est qualifié d’adiabatique, ce qui signifie, en thermodynamique, sans échange thermique avec le milieu extérieur. Commenter.
O
g
l
w
A
F IG . 24.14. — Invariant d’un pendule simple
25
Mouvement d’un solide autour d’un axe fixe
Le mouvement d’un solide autour d’un axe fixe est l’un des mouvements les plus importants dans
la pratique, car on l’observe partout : dans les machines outils des ateliers, dans les véhicules, dans les
appareils de mesures, etc. Le pendule pesant en est aussi un exemple qui est intéressant à la fois sur les
plans pratique et pédagogique.
Cependant, la rotation est à l’origine d’un inconvénient majeur : des réactions très intenses sur les
paliers de fixation peuvent prendre naissance et produire des contraintes mécaniques qui provoquent
l’usure rapide de ces paliers.
C’est ce que montre l’expérience représentée sur la figure 25.1a, dans laquelle on fait tourner une
tige AB autour d’un axe qui passe par son centre K et qui fait un angle u différent de 0 ◦ ou 90◦ avec
elle.
i) En fixant à l’une des extrémités A de la tige une masselotte, on constate que la rotation de la
tige perturbe de façon sensible les paliers de fixation.
ii) Cette perturbation est affaiblie si on fixe une masselotte identique à l’autre extrémité B, symétrique de A par rapport à K, de telle sorte que le centre de masse C soit situé sur l’axe de rotation
en K.
c Dunod – Toute reproduction non autorisée est un délit
iii) Elle s’atténue encore davantage si la tige est perpendiculaire à l’axe de rotation.
Comme l’usure rapide des paliers P 1 et P2 doit être évitée, en raison des graves dangers que
peut occasionner leur rupture, pour des vitesses angulaires importantes, il est nécessaire de dégager de
l’étude du mouvement d’un solide autour d’un axe les conditions dites d’équilibrage qui évitent de tels
inconvénients.
Voyons d’abord comment on réalise la liaison pivot qui permet le mouvement de rotation d’un
solide autour d’un axe fixe.
B
K
P1
µ
Ω P2
A
x
Solide
Tige
Ω
O
y
a)
F IG . 25.1.
R
S
b)
Δ
z
422
25. Mouvement d’un solide autour d’un axe fixe
I . — LA LIAISON PIVOT
I . 1 . — Définition
Soit un solide quelconque S pouvant tourner autour d’un axe maintenu en ses extrémités par des
paliers de fixation. L’axe est confondu avec l’axe Oz d’un référentiel terrestre R = Oxyz. Cette liaison
qui impose à S un seul degré de liberté angulaire est une liaison pivot (Fig. 25.1b). Elle est parfaite
si la puissance des forces de contact est nulle, soit en notant R et G O les éléments, au point O, du
torseur des actions de contact qu’exerce l’axe de rotation Oz sur S :
Pt = P = G O · V = G Oz V = 0 d’où G Oz = 0
La liaison est donc parfaite si GO est normal à V.
I . 2 . — Réalisation technologiqued’une liaison pivot parfaite
Il existe plusieurs manières de réaliser une liaison pivot parfaite. Les schémas de la figure 25.2
représentent quatre exemples d’une telle réalisation :
(a) par contact quasi ponctuel, utilisé notamment dans l’horlogerie,
(b) par contact à couteau, comme dans une balance,
(c) par roulements à billes dans les machines tournantes,
(d) par coussin d’air sans axe matériel, si la rotation est très rapide.
air
a)
b)
c)
d)
F IG . 25.2.
II . — MOUVEMENT D’UN SOLIDE AUTOUR D’UN AXE FIXE
II . 1 . — Analyse générale
Considérons un solide quelconque S, de masse m, en rotation autour de l’axe Oz du référentiel terrestre R supposé galiléen (Fig. 25.3). Les liaisons permettant ce mouvement sont supposées
isodynamiques, c’est-à-dire que toute liaison superflue est exclue. Notons [F, MO ] la somme et le moment des forces extérieures autres que les forces de contact et [R, GO ] la somme et le moment des forces
de contact au point fixe O .
x x
θ
y
R
θ y
R
C
l
O
H
F IG . 25.3.
S
z
423
Mouvement d’un solide autour d’un axe fixe
Le solide a un degré de liberté, mais les actions de contact introduisent des inconnues supplémentaires, qui sont au nombre de cinq, si la liaison pivot est parfaite : trois pour R et deux pour G O ,
puisque GOz = 0. Les six équations scalaires issues des théorèmes de la quantité de mouvement et du
moment cinétique sont donc nécessaires. Cependant, dans ce cas, les actions de contact a priori inconnues ont une puissance nulle, ce qui confère au théorème de l’énergie cinétique une grande efficacité :
comme il n’y a qu’un seul degré de liberté, ce théorème fournit d’emblée l’équation du mouvement. En
effet :
d Ek
d Ek
= (F + R) · vO + (MO + GO) · V se réduit à
= M Oz · V = MOzu̇
dt
dt
L’énergie cinétique étant Ek = IOz u̇2/2, où I Oz est le moment d’inertie du solide S par rapport à l’axe
de rotation Oz , on trouve :
d Ek
= IOz üu̇ = M Oz u̇
dt
soit
Iü = M Oz
en écartant la solution sans intérêt u̇ = 0.
On retrouve aisément cette dernière équation à l’aide du théorème du moment cinétique :
d LO
= MO + G O
dt
donne
d(LO · e z)
= M O · ez
dt
la liaison étant parfaite et donc GO · ez nul. Il en résulte :
d L Oz
= M Oz
dt
d’où
IOzü = M Oz
II . 2 . — Pendule pesant
a) Définition
c Dunod – Toute reproduction non autorisée est un délit
Un pendule pesant est un solide en mouvement autour d’un axe fixe horizontal sous l’action de son
poids. Évidemment, l’action du poids n’est efficace que si l’axe de rotation ne passe pas par le centre de
masse du pendule (Fig. 25.4a).
b) Conservation de l’énergie mécanique
L’application du théorème de l’énergie, pour ce système conservatif, donne une équation analogue
qui se prête bien à une discussion qualitative du mouvement. L’énergie cinétique a pour expression :
IOz u̇2
2
Quant à l’énergie potentielle de pesanteur, elle s’écrit, si l désigne la distance du centre de masse C à
l’axe de rotation :
Ep = −mg · OC + Cte soit E p = −mgl cos u
Ek =
en explicitant et en adoptant comme origine de Ep sa valeur pour u = p/2. Comme la puissance des
forces non conservatives est nulle, l’énergie mécanique est constante :
Em =
I Oz u̇2
− mgl cos u = Cte
2
424
25. Mouvement d’un solide autour d’un axe fixe
mgl Ep (µ)
Em
O
z
l
g
µ
-¼
- µ0
C
-
¼
2
a)
0
Ek
- mgl
b)
µ0
¼
µ
¼
2
F IG . 25.4.
c) Nature du mouvement
Discutons, à l’aide du graphe E p (u), les différents mouvements possibles suivant la valeur de
l’énergie Em (Fig. 25.4b) et par conséquent suivant les conditions initiales :
I Oz u̇20
− mgl cos u 0
2
i) Si E m mgl, le mouvement est révolutif.
Em =
ii) Si −mgl < E m < mgl, le mouvement du pendule est oscillatoire entre deux valeurs symétriques
de l’angle u. Dans le cas où Em est voisin de 0, u reste petit et l’équation différentielle du deuxième
ordre se réduit à :
mgl 1/2
I Oz ü ≈ −mgl u soit ü + v20 u = 0 en posant v 0 =
IOz
Le mouvement est donc sinusoïdal de la forme :
u = um cos(v0 t + f) = um cos 2p
t
+f
T0
avec
T0 =
2p
I Oz
= 2p
mgl
v0
1/2
Les constantes um et f sont évidemment déterminées par les conditions initiales.
Ordre de grandeur : Pour une tige homogène, de masse m et de longueur L = 20 cm, qui oscille
autour de l’une de ses extrémités, l = L/2 et le moment d’inertie est I = mL 2/3. Par conséquent, la
période vaut :
1/2
mL2 /3
2L 1/2
T0 = 2p
= 2p
= 0, 73 s
mgL/2
3g
Notons que la masse m n’intervient dans cette expression, du fait de l’égalité de la masse grave et de
la masse inerte (cf. chapitre 7). La mesure de la durée de dix oscillations confirme une telle valeur avec
une bonne précision.
d) Pendule de Kater
Le pendule de Kater est un pendule pesant réversible que le britannique H. Kater mit au point en
1817, afin de déterminer la valeur du champ de pesanteur g , avec une meilleure précision que celle que
permettait le pendule pesant, en raison de la difficulté à connaître avec précision la distance l = OC
dans ce dernier (Fig 25.5).
Le moment d’inertie I par rapport à l’axe de rotation Oz s’exprime simplement en fonction du
moment d’inertie ICz par rapport à l’axe parallèle Cz :
IOz = ICz + ml2 = m(R2 + l2)
425
Mouvement d’un solide autour d’un axe fixe
R étant le rayon du gyration (cf. chapitre 17). Il en résulte une nouvelle expression de T 0 :
R 2/l + l
g
T0 = 2p
1/2
On voit que le pendule simple, de longueur ls = R2 /l + l , est synchrone de ce pendule pesant.
En outre, si l’on fait osciller le pendule autour d’un axe O z , parallèle à Oz et passant par le point
, situé sur la droite OC à l’opposé de O , à la distance l de ce point, on trouve une période de même
expression :
O
T 0
= 2p
R2 /l + l
g
1/2
d’où
T 0 = T0
pour
l =
r2
l
On dit que les axes Oz et O z sont réciproques. La période s’écrit alors simplement en fonction de
la distance OO = L = l + R 2/l : T0 = 2p(L/g) 1/2 . Si le pendule bat la seconde, c’est-à-dire si
T 0 = 2 s , on a la relation simple suivante g = p2L qui permet de déterminer g à partir de la mesure
précise de L .
Ce pendule n’est plus utilisé depuis 1930, car les techniques actuelles, surtout celles s’appuyant
sur des données satellitaires, sont bien plus précises.
.
L = Iµ
Oz
l
g
u
Em > mgl
Em = mgl
Cz
l0
O0 z
x
F IG . 25.5.
-¼
0
¼
θ
Em < mgl
F IG . 25.6.
c Dunod – Toute reproduction non autorisée est un délit
e) Analyse dans l’espace des phases
L’état mécanique du pendule pesant étant caractérisé par la donnée à la fois de u et de sa dérivée
u̇, plus précisément du moment cinétique L = I u̇, il est préférable d’étudier les différents mouvements
dans l’espace des phase s (u, L). L’énergie mécanique Em s’écrit en fonction de u et L :
L2
− mgl cos u d’où
2I
On retrouve les deux types de mouvement :
Em =
L = [2I(Em + mgl cos u)]1/2
i) E m mgl. Le moment conjugué L est une fonction périodique de u, lequel ne s’annule jamais.
Le mouvement du pendule est révolutif.
ii) −mgl < Em < mgl. Le pendule oscille entre deux valeurs opposées de l’angle, u 1 et −u1 ,
telles que u1 = arccos(−E m/mgl).
Dans l’espace des phases, la trajectoire du point représentatif du système est celle représentée sur
la figure 25.6. On y distingue aisément deux zones : l’une pour laquelle le mouvement est oscillatoire,
l’autre pour laquelle le mouvement est révolutif. On voit que les conditions initiales permettent de
déterminer sans ambiguïté le type de mouvement du pendule dans l’espace des phases : mouvement
oscillatoire ou mouvement révolutif.
426
25. Mouvement d’un solide autour d’un axe fixe
f) Influence de l’amplitude sur la période
Si l’amplitude d’un pendule simple n’est pas assez faible pour justifier l’approximation sin u = u,
l’équation différentielle du mouvement comporte des termes non linéaires en u puisqu’elle s’écrit :
ü + v20 sin u = 0
En remplaçant sin u par un développement à l’ordre trois en u, on obtient l’équation différentielle
suivante :
u3
v2
= 0 soit ü + v 20u − 0 u3 = 0
ü + v20 u −
3!
6
Une analyse, analogue à celle déja effectuée dans le cas du pendule simple (cf. chapitre 10), permet
d’obtenir une expression approchée de l’influence de l’amplitude des oscillations sur la période :
v = v0
u2
1− m
8
1/2
d’où
u2
1− m
8
T = T0
−1/2
≈ T0 1 +
u2m
16
II . 3 . — Pendule de torsion
a) Définition
Un pendule de torsion est un solide en mouvement autour d’un axe, qui passe par son centre
de masse, sous l’action d’un couple de rappel, proportionnel à l’angle de rotation, exercé par un fil
(Fig. 25.7).
z
g
y
θ
x
y
x
S
F IG . 25.7.
b) Équation du mouvement
Supposons que le solide soit soumis en outre à un couple de frottement visqueux, c’est-à-dire de la
forme −a u̇. L’équation Iü = M Oz donne :
I ü = −Cu − a u̇
soit
ü +
u̇
+ v20u = 0
te
en introduisant la durée de relaxation te en énergie et la pulsation propre v0 :
1
a
C
=
et v20 =
te
I
I
Cette équation est caractéristique d’un mouvement sinusoïdal amorti par frottement visqueux (cf. chapitre 10).
c) Nature du mouvement
Dans le cas fréquent où t e est suffisamment grand (Q = v0 te 1/2), le mouvement admet
comme équation horaire (cf. chapitre 10) :
t
1 1/2
u = A exp −
cos(vat + f) où v a = v0 1 −
2te
4Q2
427
Mouvement d’un solide autour d’un axe fixe
est la pulsation de ce mouvement sinusoïdal amorti. Les constantes A et f sont déterminées par les
conditions initiales. On vérifie bien que, pour te infini, le mouvement est harmonique de période :
T0 =
2p
= 2p
v0
I
C
1/2
Une application intéressante du pendule de torsion est la détermination expérimentale du moment
d’inertie d’un satellite artificiel par rapport à son axe de révolution, avant son lancement. Par exemple,
si T0 = 12 s et C = 3, 5 × 10 3 N . m . rad−1 , on trouve :
T2
I = 02 C = 12, 7 × 10 3 kg . m 2
4p
III . — MACHINES TOURNANTES
Une machine tournante est un solide de révolution S constitué généralement par le rotor d’un
moteur, l’arbre de transmission et le rotor d’une machine utilisatrice. Les stators du moteur et de l’outil
exercent respectivement le moment moteur Gm = Gm ez et le moment résistant Gr = G r ez : lors d’une
mise en route, Gm > 0 et G r < 0 (Fig. 25.8a). Les frottements, supposés visqueux, exercent un couple
de frottement : Gf = −a u̇ez, u̇ étant la vitesse angulaire de la machine.
III . 1 . — Mise en rotation
Le moment des forces extérieures par rapport à l’axe de rotation est : G Oz = Gm + G r − a u̇. Par
conséquent, I étant le moment d’inertie par rapport à l’axe de rotation, il vient :
I ü = G m + G r − au̇
soit ü +
a
G + Gr
u̇ = m
I
I
Comme a/I et (Gm + G r )/a sont respectivement homogènes à l’inverse d’une durée et à une vitesse
angulaire, on pose :
c Dunod – Toute reproduction non autorisée est un délit
1
a
=
t
I
V0 =
Gm + Gr
a
d’où l’équation canonique
ü +
u̇ V0
=
t
t
Avec les conditions initiales u0 = 0 et u̇ 0 = 0, on trouve pour V = u̇ et u :
V = V 0 1 − exp −
t
t
et u = V 0t − V0 t 1 − exp −
Machine
x Moteur
t
t
Ω
Ω0
Rotor
O
y
z
Stator
Arbre de
transmission
a)
0
Stator
¿
t
b)
F IG . 25.8.
428
25. Mouvement d’un solide autour d’un axe fixe
III . 2 . — Discussion
a) Vitesse de régime
La vitesse de régime est la vitesse de rotation acquise au bout d’une durée suffisamment longue.
Alors V ≈ V0 comme le montre le graphe V(t) sur la figure 25.8b. Notons que :
i) cette vitesse est atteinte d’autant plus vite que t est petit (frottements forts et inertie faible),
ii) elle est d’autant plus grande que les frottements sont faibles (grâce à des lubrifiants) et que le
moment moteur résultant (G m + Gr ) est grand. En particulier, si la machine fonctionne à vide (Gr = 0),
V0 est plus élevée qu’en charge.
b) Travail en régime stationnaire
La machine tournante ayant atteint sa vitesse de régime, son énergie cinétique reste constante ; le
travail moteur est alors transformé en énergie interne ou en chaleur par l’intermédiaire des frottements
(cf. Thermodynamique).
c) Volant d’inertie
Soit une machine tournant en régime stationnaire (V ≈ V 0 ). Calculons la variation relative de la
vitesse de rotation DV/V0 qu’entraîne l’action d’un couple supplémentaire indésirable Gs entre les
instants voisins t et t + Dt. En appliquant le théorème de l’énergie cinétique, on obtient :
D
1 2
IV = (P m + P r + Ps )Dt
2
où Pm , P r et Ps représentent respectivement les puissances des couples moteur résistant et supplémentaire. Il en résulte la variation relative de la vitesse de rotation :
(P + P r + Ps)Dt
DV
= m
V0
IV 20
Ainsi, en faisant tourner les machines à haut régime (V0 grand) et en leur donnant une grande inertie
de rotation (I grand), on évite les brusques variations de leur vitesse angulaire. C’est pour satisfaire à
cette seconde condition qu’on ajoute souvent un volant d’inertie sur l’axe de rotation des machines.
IV . — ÉQUILIBRAGE DES MACHINES TOURNANTES
L’équilibrage d’une machine tournante consiste à rendre les actions qu’exerce la machine sur les
paliers de fixation de l’axe de rotation indépendantes du mouvement.
IV . 1 . — Intérêt de l’équilibrage
Les équations issues de l’application des théorèmes généraux montrent que le torseur [−R, −G O ]
des actions de contact qu’exerce le rotor d’une machine tournante sur les paliers dépend non seulement
du torseur des forces données [F, MO] mais aussi du mouvement :
dP
d LO
et − GO = MO −
dt
dt
Ces actions ne seront totalement maîtrisées que si elles sont indépendantes du mouvement, c’est-à-dire
si les termes liés au mouvement ont une contribution nulle : d P/ d t = 0 et d L O/ d t = 0. Il en résulte
que :
−R = F −
429
Mouvement d’un solide autour d’un axe fixe
i) Le centre de masse doit être situé sur l’axe de rotation ; c’est l’équilibrage statique.
ii) Le moment cinétique doit être porté par l’axe de rotation, autrement dit l’axe de rotation doit
être axe principal d’inertie ; c’est l’équilibrage dynamique.
Lorsque la machine est équilibrée, le torseur des actions qu’elle exerce sur les paliers de fixation
est égal au torseur des actions connues qui s’exercent sur elle : −R = F et −G O = MO .
IV . 2 . — Réalisation de l’équilibrage
On réalise l’équilibrage d’une machine en imposant les deux conditions précédentes. Par exemple,
on équilibre la rotation de la tige dans l’expérience initiale de la figure 25.1a en fixant la tige au centre
de masse et en imposant qu’elle fasse un angle droit avec l’axe. Dans la pratique, on ne distingue pas ces
deux conditions ; on procède globalement à l’aide d’une machine équilibreuse, dont le principe repose
sur la détection des vibrations qui apparaissent avec une machine non équilibrée.
IV . 3 . — Calcul des efforts sur les paliers de fixation
Le calcul des efforts exercés par la machine tournante sur les paliers de fixation exige l’explicitation
des théorèmes de la quantité de mouvement et du moment cinétique.
Pour exprimer ces équations vectorielles, il est commode d’utiliser la base du repère R = Ox yz
lié au solide S et tel que le centre de masse C soit contenu dans le plan Ox z (25.3).
D’après le théorème de la quantité de mouvement, il vient, relativement à R :
m aC = F + R
La vitesse vC et l’accélération a C de C s’écrivent respectivement, dans la base de R :
R
0
l u̇
0
et
R
−lu̇ 2
lü
0
c Dunod – Toute reproduction non autorisée est un délit
En projetant la relation vectorielle précédente dans cette même base, on obtient les trois équations
suivantes :
0 = Fz + Rz
−ml u̇2 = Fx + Rx
ml ü = F y + Ry
Quant au théorème du moment cinétique appliqué en O, il donne, relativement à R :
d LO
dt
= M O + GO
R
L’opérateur d’inertie du solide en O, [I ]O , le vecteur vitesse angulaire de S par rapport à R, V, et le
moment cinétique en O, LO, de S par rapport à R, s’explicitent dans la base de R respectivement
selon :
0
I Ox −I xy −Ix z
−Ix zu̇
0
et
−Iyx
IOy
−Iy z
−Iy zu̇
u̇
−I
−I
I
I Oz u̇
R
R
zx
zy
Oz
R
Pour dériver LO par rapport au temps, relativement à R, il suffit de composer les dérivations :
dL
dt
=
R
dL
dt
R
+V×L
430
25. Mouvement d’un solide autour d’un axe fixe
On obtient, en explicitant :
R
0
GOx
−Ix z ü
−Ix zu̇
MOx
0 ×
GOy
MOy +
−Iy z ü +
−Iy zu̇ =
IOz ü
IOz u̇
R u̇
R
R MOz
R GOz
soit, les trois nouvelles équations suivantes :
−I x zü + Iy zu̇ 2 = MOx + G Ox
−I yz ü − Ix zu̇ 2 = MOy + G Oy
−IOz ü = MOz + GOz
On en déduit les expressions des composantes, dans la base de R , de −R et de −M O :
−Rx = Fx + mlu̇2,
et
−R y = Fy − mlü,
−G Ox = Mx + Ix zü − I y zu̇ 2,
−R z = Fz
−GOy = My + Iy z ü + Ix z u̇2 ,
−GOz = 0
On retrouve les conditions de l’équilibrage en faisant l = 0, I xz = 0 et Iy z = 0, ce qui revient à
imposer le centre de masse sur l’axe et à rendre principal cet axe.
En général, lorsqu’il sort de la fabrication, le rotor d’une machine tournante ne satisfait pas à ces
conditions. Supposons que la distance de C à l’axe de rotation soit seulement de 0, 1 mm. Comparée
au poids de S, la contribution ml u̇2 à −R d’une rotation uniforme vaut mg pour un rotor tournant à
3 000 tours . min−1 et atteint 100 mg pour un rotor tournant à 30 000 tours . min −1 .
Cet exemple montre toute l’importance d’un usinage soigné assurant un centre d’inertie C très
voisin de l’axe de rotation. On corrige les imperfections éventuelles du solide tournant en enlevant ou
en ajoutant de la matière.
IV . 4 . — Exemples
a) Équilibrage d’un vilebrequin
Le vilebrequin est la pièce importante d’un moteur d’automobile qui permet de transformer le mouvement de translation des pistons en un mouvement de rotation transmis aux roues (Fig. 25.9). Comme
les différentes bielles viennent s’articuler sur lui, cette pièce ne présente pas de symétrie matérielle, alors
que sa vitesse de rotation est importante, environ 5 000 tours . min−1 . L’équilibrage statique et dynamique du vilebrequin est donc une opération indispensable que l’on réalise le plus souvent par retrait
de masses ponctuelles.
Piston
x
Bielle
Tourillon
Arbre
C
z1 O z 2
Maneton
F IG . 25.9.
F IG . 25.10.
z
431
Mouvement d’un solide autour d’un axe fixe
b) Équilibrage d’une roue d’automobile à l’aide de deux masselottes
Notons m1 et m2 les masses des masselottes A1 et A2 ajoutées respectivement aux points de
coordonnées x1, y1 , z1 et x 2 , y2, z2 dans le repère Ox yz lié à la roue ; soit en outre I 0xz et I0y z les
produits d’inertie de la roue seule (Fig. 25.10). Les deux conditions d’équilibrage, C sur l’axe Oz et
Oz axe principal d’inertie donnent :
(1)
ml + m x + m x = 0
Ix0z
Iy0z
+
+
1 1
2 2
m1 y1 + m 2 y2
m1x1z1 + m2x 2z2
m1y1z1 + m2y 2z2
= 0
(2)
= 0
(3)
= 0
(4)
Les équations (2) et (4) combinées montrent que les deux masselottes doivent être situées dans
deux plans différents, normaux à Oz. En effet, puisqu’à la fois I0y z = 0 et m1y 1 = 0 :
I 0y z + m1y 1(z 1 − z2 ) = 0
donne
z2 = z 1
c Dunod – Toute reproduction non autorisée est un délit
CONCLUSION
Retenons les points essentiels.
(1) Le mouvement d’un solide autour d’un axe est réalisé par une liaison parfaite caractérisée par
un moment nul des actions de contact par rapport à l’axe de rotation.
(2) Si la liaison est parfaite, le mouvement est obtenu aisément en appliquant le théorème de l’énergie. Sinon, il faut appliquer les théorèmes de la quantité de mouvement et du moment cinétique, lesquels
sont indispensables dès que l’on veut connaître les actions de contact.
(3) L’analyse du rôle de ces actions permet de dégager une notion technologique fondamentale :
Tout système en rotation nécessite une symétrie matérielle de révolution autour de son axe de
rotation.
Dans le cas contraire, les fortes réactions qui prennent naissance risquent de détériorer rapidement
les paliers de fixation de l’axe de la machine. Cependant, si la symétrie matérielle de révolution autour
de l’axe de rotation ne peut être réalisée, le double équilibrage statique et dynamique permet de rétablir
les avantages mécaniques de cette symétrie ; c’est ce que l’on fait dans la pratique avec le vilebrequin et
les roues des automobiles.
Un exemple simple et important de machine tournante est le pendule pesant : rappelons que, si son
énergie mécanique est proche de sa valeur à l’équilibre, son mouvement est harmonique avec la période
T 0 = 2p[I/(mgl)] 1/2 .
EXERCICES ET PROBLÈMES
P25– 1. Mise en rotation d’une plaque à l’aide d’un projectile
Une plaque carrée, de côté a, de masse M, peut tourner parfaitement autour d’un axe horizontal
coïncidant avec l’un de ses côtés (Fig. 25.11). Elle est mise en mouvement, à partir de sa position
d’équilibre, par un projectile de masse m et de vitesse v qui la heurte en son centre.
1. Trouver l’équation différentielle du mouvement de rotation de la plaque.
2. Quelle doit être la vitesse minimale du projectile pour que la plaque fasse un demi-tour
si m = 10 g, M = 1 kg, a = 1 m ?
432
25. Mouvement d’un solide autour d’un axe fixe
z
α
z1
g
b
O
O
C
g
y
θ a
θ
x
F IG . 25.11.
F IG . 25.12.
P25– 2. Rotation autour d’un axe incliné par rapport à la verticale
L’axe Oz autour duquel peut tourner parfaitement une porte rectangulaire plane, homogène, de
côtés a et b, fait l’angle a constant avec la verticale du lieu Oz 1 représentée sur la figure 25.12 dans
le plan vertical Ozx. Étudier, à l’aide du théorème du moment cinétique, le mouvement de cette porte
par rapport au référentiel terrestre Oxyz dont le plan Ozx est vertical. Retrouver les cas classiques
a = 0 et a = p/2.
P25– 3. Réactions sur l’axe d’un disque en rotation
Un disque de masse 10 kg tourne uniformément autour d’un axe, à la vitesse angulaire de
9 000 tours . min −1. L’axe matériel est maintenu vertical par deux points de fixation, l’un O 1 situé
à 20 cm du plan du disque, l’autre O2 à 50 cm. Le centre de masse C du disque est excentré de
0, 04 mm de l’axe (Fig. 25.13). Calculer les forces horizontales qui s’exercent sur O1 et O 2 .
z
g
g
C
A2
y
θ
O1
x
O2
F IG . 25.13.
S
x
A1
F IG . 25.14.
P25– 4. Mesure du moment d’inertie d’un satellite artificiel
Afin de déterminer le moment d’inertie d’un satellite artificiel S, par rapport à son axe de révolution Oz, on le suspend par un fil métallique et on le fait osciller dans un plan horizontal autour de
sa position d’équilibre (Fig. 25.14). Le fil exerce un couple de torsion de rappel de la forme −Cu, C
étant une constante positive et u l’angle de rotation du solide autour de l’axe vertical, compté à partir de l’équilibre.
1. Établir l’équation différentielle de mouvement et en déduire la période T 0 des oscillations.
2. On ajoute deux masselottes identiques A 1 et A2, de masse m, situées symétriquement à la
distance d de l’axe vertical. Montrer que la mesure des périodes T0 et T, lorsqu’il y a les surcharges,
permet de déterminer le moment d’inertie I0 du solide par rapport à Oz.
433
Mouvement d’un solide autour d’un axe fixe
P25– 5. Horloge de campagne
Le balancier d’une horloge est constitué d’une tige et d’un disque fixé à son extrémité inférieure
(Fig. 25.15). La tige est assimilable à un segment matériel homogène , de longueur l = 1 m, de masse
mt = 0, 300 kg. Le disque homogène a une masse m d = 0, 250 kg et un rayon R = 15 cm. L’ensemble forme un solide de masse m. L’axe du disque est parallèle à l’axe de rotation horizontal OY
du balancier, perpendiculaire au plan de la figure. La liaison avec l’axe OY est une liaison pivot parfaite. Le balancier constitue un pendule qui commande l’avancement des aiguilles de l’horloge. À l’instant choisi comme origine, le pendule est immobile et son axe de symétrie D fait avec la verticale
descendante OZ un angle u 0. On désigne par g ≈ 9, 80 m . s−2 l’intensité du champ de pesanteur terrestre.
1. a) Montrer, par des considérations qualitatives sur l’énergie, que le mouvement est périodique si
les frottements peuvent être négligés.
b) En notant d la distance qui sépare le centre de masse C du balancier de l’axe OY et I son
moment d’inertie par rapport à cet axe, établir l’équation différentielle du mouvement, si les frottements
sont négligeables.
c) L’angle u 0 étant très petit, trouver u(t) ainsi que l’expression littérale de la période T 0 des
oscillations.
2. a) Calculer en cm la distance d.
b) Quel est le moment d’inertie I t de la tige ainsi que celui I d du disque par rapport à OY ? En
déduire le moment d’inertie total I. Calculer I et T0 en unités SI.
OY
y
X
(l,mt )
g
b
g
θ
B
α
(R,md )
Z
F IG . 25.15.
O
A
D
θ
x
F IG . 25.16.
c Dunod – Toute reproduction non autorisée est un délit
P25– 6. Sismographe de La Coste
Une tige, de masse négligeable et de longueur l, portant un point matériel A, de masse m, oscille
sans frottement autour de l’axe Oz horizontal d’un référentiel terrestre R = Oxyz ; Oy est la verticale ascendante. Un ressort, d’extrémités B et D, exerce sur la tige une force de rappel K × DB proportionnelle à sa longueur DB. Sur la figure 25.16 sont précisées les notations : OA = l, OB = b,
OD = d, (Ox, OB) = a = Cte et (Ox, OA) = u.
1. Établir l’équation différentielle en u.
2. À quelle condition sur m, g, l, d, b, K et a, l’angle définissant la position de repos est-il nul ?
3. Trouver l’expression de la période des petites oscillations. On donne l = 5 cm. Quelle doit être
la valeur de a pour que la période T0 soit de 20 s ?
P25– 7. Pendule pesant constitué d’une demi-boule
Un pendule pesant est constitué d’une demi-boule homogène, de rayon r, fixée à l’extrémité d’une
tige de longueur égale à r et de masse négligeable (Fig. 25.17). Il oscille, de façon parfaite, dans un
plan vertical, autour d’un axe horizontal. Déterminer la période des petites oscillations. Application
numérique : r = 5 cm.
434
25. Mouvement d’un solide autour d’un axe fixe
y
g
g
O
µ
K
C
K
θ
C
x
I
F IG . 25.17.
F IG . 25.18.
P25– 8. Oscillations d’un demi-cylindre plein en contact avec un plan
Une demi-cylindre plein homogène, de rayon r, en contact avec un plan horizontal, oscille dans
un plan vertical, autour de sa position d’équilibre, en roulant sans glisser sur le plan (Fig. 25.18). Déterminer la période des petites oscillations. Application numérique : r = 5 cm.
P25– 9. Mise en rotation d’un disque autour d’un axe vertical
On considère le système représenté sur la figure 25.19. Le disque plein homogène D (masse
M, rayon R) est mis en mouvement autour de son axe fixe Oz par deux petits disques D1 et D2 ,
identiques (masse négligeable, rayon r), qui roulent sans glisser sur D ; les centres de ces disques sont
reliés par une tige horizontale T (masse m, longueur 2l < 2R). On désigne par c l’angle de rotation
de D, u l’angle de rotation de T , f1 l’angle de rotation du disque D1 autour de son axe et f2
l’angle de rotation du disque D2 autour du même axe. Toutes les autres liaisons sont parfaites.
1. Écrire les deux conditions de roulement sans glissement. En déduire que le système dépend de
deux degrés de liberté.
2. Quelles sont les deux équations différentielles du mouvement ? En déduire la nature du mouvement.
3. Un moteur exerce sur la tige un moment égal à : G m − a u̇ ez. Trouver ċ en fonction du temps
dans le cas où initialement ċ = 0. On exclura le cas singulier ċ = u̇.
z
D2
D
D1
O
µ
x
F IG . 25.19.
y
26
Gyroscope.
Mouvement d’un solide autour d’un point.
Effets microscopiques
Le mouvement le plus général d’un solide peut être décomposé en deux : le mouvement de son
centre de masse C et son mouvement autour de son centre de masse C , précisément par rapport au
référentiel du centre de masse R∗ dans lequel C est fixe. Par conséquent, l’étude du mouvement d’un
solide autour d’un point a comme champ d’application, outre la dynamique du solide fixé en un point,
celle du solide libre, d’où son intérêt.
Une fois la réalisation technique d’une liaison sphérique parfaite précisée, nous étudierons le mouvement le plus spectaculaire, celui du gyroscope dont l’analyse est sur le plan théorique la plus simple
et dont les applications sont les plus importantes. Nous analyserons ensuite le mouvement d’une toupie dans l’approximation gyroscopique, avec son application en magnétisme.
c Dunod – Toute reproduction non autorisée est un délit
Nous terminerons par les mouvement dits de Poinsot et de Lagrange et Poisson, leur étude s’avérant
laborieuse, et les applications mineures.
Voyons d’abord comment on réalise une liaison sphérique permettant à un solide de prendre toutes
les positions autour d’un point qui peut être son centre de masse.
I . — LA LIAISON SPHÉRIQUE
Le solide S considéré a un point fixe dans le référentiel du laboratoire ou dans le référentiel
du centre de masse. Il a donc trois degrés de liberté de rotation qu’on pourra prendre égaux aux angles
d’Euler (cf. chapitre 16) : l’angle de précession c, l’angle de nutation u et l’angle de rotation propre f
(Fig. 26.1a).
I . 1 . — Réalisation technologique
Techniquement, on réalise une telle liaison à l’aide d’une suspension à la Cardan, du nom du
mathématicien italien G. Cardano ; cette suspension permet de combiner trois liaisons pivots indépendantes, grâce à deux anneaux, l’un extérieur Aex et l’autre intérieur Ain (Fig. 26.1a). On obtient ainsi
tous les mouvements du solide S autour de O.
On peut aussi réaliser cette liaison à l’aide d’une rotule, c’est-à-dire une sphère liée au solide S,
qui évolue dans une coquille sphérique dont le rayon est voisin de celui de la rotule (Fig. 26.1b).
436
26. Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
z
z
θ
S
Δ
y
x
Ain
φ
O
y
x
R
ψ
O
u
A ex
a)
b)
F IG . 26.1.
I . 2 . — Liaison sphérique parfaite
Si la liaison est parfaite, le moment en O (ou en C ) des actions de contact est nul. En effet,
puisque O (ou C dans R∗ ) est fixe dans R, on a, en désignant par [R, GO ] le torseur des actions de
contact :
P c = P t = R · vO + GO · V = G O · V = 0
quel que soit
V si
GO = 0
II . — GYROSCOPE
II . 1 . — Définition
Le gyroscope est un solide de révolution tournant autour de son axe, à très grande vitesse, et
suspendu par son centre de masse C , de façon parfaite. Cet instrument a été inventé par Foucault en
1850 et appelé ainsi parce qu’il permet de visualiser (scope) le mouvement de rotation (gyro) de la Terre
sans avoir à observer les étoiles.
La grande vitesse de rotation propre est obtenue grâce à un moteur électrique autonome qui est
souvent incorporé dans le gyroscope ; en général, la vitesse de rotation du « gyro » est comprise entre
8 000 et 20 000 tours par minute. En outre, une suspension à la Cardan permet au gyro de prendre
librement toutes les positions autour de son centre de masse.
II . 2 . — Propriété essentielle
La propriété essentielle du gyro découle de l’application du théorème du moment cinétique en C
dans un référentiel galiléen R. La liaison étant parfaite et le moment des forces données (poids en C,
etc.) nul, on a :
d LC
=0
dt R
Ainsi, par rapport à un référentiel galiléen R, le moment cinétique LC est une constante vectorielle ;
comme, en outre, du fait de la symétrie, LC et son vecteur vitesse angulaire de rotation V sont colinéaires, l’axe du gyro pointe constamment un même point de R (Fig. 26.2) :
LC = Cte
d’où
V = Cte
437
Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
Dans le cas d’expériences précises où le référentiel galiléen considéré est le référentiel de Copernic,
l’axe du gyro reste orienté vers un même point du ciel, indépendamment du mouvement de son support
lié à la Terre (Fig. 26.2a). Cette propriété du gyro s’observe aussi dans le référentiel terrestre : monté
sur un tabouret en rotation, le gyro maintient son axe fixe par rapport à ce référentiel (Fig. 26.2b).
C’est précisément cette propriété qui permet d’expliquer l’étonnante stabilité d’une assiette de cirque en
rotation rapide autour de l’extrémité d’une baguette.
ΩT
Ω
Gyroscope
Ω
N
Ω
Gyroscope
ΩT
O
¸
T
Tabouret
Terre
S
a)
b)
F IG . 26.2.
II . 3 . — Comportement paradoxal d’un gyroscope
À l’aide d’une baguette, exerçons en un point A de l’axe D du gyro, distinct de C, une force occasionnelle Foc verticale (Fig. 26.1a) : on constate que l’axe se déplace selon une direction horizontale.
Si cette force est horizontale, alors l’axe D se déplace verticalement. Comparé au mouvement qu’acquiert une simple tige, suspendue par son centre de masse et soumise aux mêmes forces, le comportement de l’axe D est paradoxal. Pourtant la simple analyse, effectuée à partir du théorème du moment
cinétique appliqué au centre de masse, donne :
c Dunod – Toute reproduction non autorisée est un délit
d LC
dt
R
= CA × F oc
Si Foc est verticale, la variation de moment cinétique, et donc celle de l’axe D , sont portées par un
vecteur horizontal. En revanche, si F oc est horizontal, la variation de moment cinétique présente une
contribution verticale.
II . 4 . — Applications du gyroscope
a) Mise en évidence de la rotation de la Terre
Par rapport à l’axe D du gyro qui est fixe dans le référentiel de Copernic R 0 lié aux étoiles, la
Terre a un mouvement de rotation propre caractérisé par le vecteur VT de R par rapport à R0 , égal
en norme à 7, 3 × 10−5 rad . s −1. Par conséquent, la rotation apparente de D par rapport à R est :
VD/R = VR0/R = −VT
Ainsi, dans le référentiel terrestre, on peut observer l’axe du gyroscope tourner, autour de l’axe sud-nord
de rotation de la Terre, avec une vitesse angulaire égale à l’opposé de la vitesse de rotation propre de la
Terre, d’où la mise en évidence et la mesure de cette vitesse.
438
26. Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
b) Gyrocompas de Foucault
En 1852, Foucault fit remarquer, à l’Académie des Sciences, que la rotation d’un corps à la surface de la Terre pouvait suffire à indiquer le plan du méridien et la latitude du lieu. L’instrument correspondant, appelé gyrocompas, est précieux pour l’orientation, notamment à bord de véhicules dont les
masses métalliques excluent l’usage d’une boussole magnétique (sous-marins, avions, fusées, etc.).
Considérons un gyroscope de Foucault suspendu à la cardan en son centre de masse, au moyen des
deux anneaux : Ain et Aex (Fig. 26.1a). On sait que, par rapport au référentiel du laboratoire, l’axe
D du gyro tourne autour de l’axe sud-nord défini par le vecteur rotation de la Terre V T . En réalité, en
raison des frottements, D s’aligne suivant VT.
i) Détermination du méridien
On impose à l’axe D du gyro d’être horizontal en maintenant A in horizontal (Fig. 26.3) ; l’axe
s’immobilise alors selon l’axe horizontal Dm , contenu dans le plan du méridien local formé par V T et
la verticale du lieu.
Étoile polaire
ΩT
Δ
N Δm
ΩT
Plan méridien
O
T
¸
Horizontale locale
Terre
S
F IG . 26.3.
ii) Détermination de la latitude
On impose ensuite à l’axe D du gyro de se mouvoir dans un plan vertical ; on y parvient en rendant
Aex solidaire du bâti. L’axe D s’oriente alors suivant V T , c’est-à-dire suivant la direction de l’étoile
polaire (Fig. 26.3). On en déduit la latitude du lieu qui est donnée par l’angle (Dm , VT ) .
c) Couple gyroscopique
On appelle couple gyroscopique le moment qu’exerce un gyroscope sur son support lorsqu’on
contraint son axe à changer d’orientation.
L’application du théorème du moment cinétique, en C, par rapport au référentiel terrestre R
supposé galiléen, donne :
dLC
= G C, ex→g
dt R
G C, ex→g étant le moment des actions exercées par le support sur le gyroscope, c’est-à-dire, d’après
l’opposition des actions réciproques, l’opposé du couple gyroscopique GC, g→ex . Comme, en outre, le
moment cinétique LC est un vecteur porté par l’axe D du gyro, il vient, en introduisant V D/R :
d LC
dt
=
R
d LC
dt
D
+ VD/R × LC = V D/R × LC = −GC, g→ex
puisque
d LC
dt
=0
D
Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
439
Ainsi, un gyro, soumis à un changement d’orientation, exerce sur le milieu extérieur un couple gyroscopique d’expression :
GC, g→ex = LC × VD/R
C’est ce que l’on constate lorsqu’on impose manuellement une rotation à l’axe d’une roue en rotation
autour de son axe (Fig. 26.4a) ; par exemple, en faisant tourner, autour d’un axe vertical, l’axe de révolution horizontal d’un ventilateur électrique, on ressent au niveau des poignets les effets de ce couple
gyroscopique.
Si ce couple s’exerce sur un individu assis sur un tabouret d’inertie, initialement au repos, il provoque une rotation du tabouret, de telle sorte que le moment cinétique total, suivant l’axe de rotation,
soit nul (Fig. 26.4b).
Couple
gyroscopique
V
LC
LC
a)
b)
F IG . 26.4.
d) Stabilisation de trajectoire
c Dunod – Toute reproduction non autorisée est un délit
Embarqué dans un véhicule accéléré (navire, avion, cabine spatiale, etc.), un gyro permet de maintenir ce véhicule sur la trajectoire prévue. En effet, si la trajectoire de ce dernier vient à changer accidentellement, l’axe du gyro, fixe par rapport aux étoiles, change d’orientation par rapport au véhicule.
Ce changement est alors utilisé pour déclencher un mécanisme chargé de redresser sa trajectoire.
Remarque : Pour stabiliser la trajectoire d’un véhicule, on utilise actuellement des gyromètres laser ou
gyrolasers qui permettent de mesurer la vitesse angulaire du véhicule et par conséquent de
corriger cette trajectoire. L’avantage des gyrolasers vient de leur mode de fonctionnement
non mécanique, mais essentiellement optique (cf. Optique et Quantique) : on provoque
un phénomène d’interférence entre les trajets optiques des faisceaux lumineux parcourus
dans des sens opposés ; comme le décalage interférentiel dépend de la vitesse de rotation
angulaire du gyrolaser, on accède à la valeur de cette vitesse.
e) Gyroscope anti-roulis
Le couple gyroscopique exercé par un lourd gyro, sur le navire dans lequel il est embarqué, permet
d’enrayer le début d’un roulis. En effet, dès que le navire est soumis à un couple de rotation autour d’un
axe longitudinal, un mécanisme impose à l’axe D du gyro, initialement vertical, une vitesse de rotation
VD/R autour d’un axe horizontal ; le couple gyroscopique L C ×VD/R qui en résulte permet provoquer
une rétroaction permettant de redresser le navire.
Ordre de grandeur : un gyroscope de navire est constitué d’un disque de diamètre 2R = 3 m et
de masse m = 50 tonnes. Sa vitesse de rotation propre est V = 15 tr . s−1 et celle de précession
VD/R = 1, 2 rad . s−1. Le couple gyroscopique vaut donc :
G C = LC VD/R =
mR2
5 × 104 × 1, 5 2
V V D/R =
× 2p × 15 × 1, 2 = 6, 375 × 10 6 N . m
2
2
440
26. Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
III . — APPROXIMATION GYROSCOPIQUE
On dit que le mouvement, autour d’un point fixe, d’un solide S, ayant la symétrie de révolution,
satisfait à l’approximation gyroscopique si sa vitesse de rotation autour de son axe de révolution est très
grande devant toutes les autres vitesses de rotation, ce que l’on traduit par :
V ≈ V ez
Cette approximation joue un rôle capital en mécanique, car de nombreux systèmes et instruments en
rotation possèdent un tel mouvement, notamment la toupie des enfants.
III . 1 . — Équation du mouvement
Le théorème du moment cinétique appliqué au solide S, par exemple une toupie (Fig. 26.5), au
point de fixation O, donne vectoriellement :
d LO
= OC × mg
dt
d LO
mgl
≈ LO ×
LO
dt
ce qui s’écrit
puisque le moment cinétique est pratiquement porté par le vecteur OC de longueur l.
III . 2 . — Nature du mouvement
De l’équation vectorielle approchée précédente, on déduit aisément deux propriétés remarquables.
i) En multipliant les deux membres de l’équation par L O , on voit que :
LO ·
d LO
mgl
≈ LO · LO ×
dt
LO
= 0 soit
d L2O
d L 2O
=
≈ 0 et
dt
dt
L O ≈ Cte
ii) Si on multiplie les deux membres par ez , on trouve :
ez ·
d LO
mgl
= 0 soit
≈ ez · L O ×
dt
LO
d
d LOz
≈ 0 et
(LO · e z) =
dt
dt
LOz ≈ Cte
Ainsi, au cours du mouvement, la norme L O de LO et sa projection L Oz du moment cinétique suivant
un axe vertical sont approximativement constants. Il en résulte que le vecteur L O décrit un cône de
sommet O, d’axe Oz défini par le champ de pesanteur et de demi-angle au sommet u 0 que fait L O
avec l’axe vertical Oz (Fig. 26.5). Retenons donc :
L’axe de rotation propre Oz précessionne autour de la direction du champ de pesanteur.
Ce mouvement de précession à angle constant suppose évidemment que l’on ait négligé les forces
de frottement. Dans le cas contraire, la vitesse de rotation propre ainsi que la vitesse de précession s’affaiblissent et l’angle de nutation augmente jusqu’à la valeur u = p à l’équilibre qui réalise l’orientation
de l’axe de la toupie selon le champ de pesanteur.
L’équation vectorielle précédente, caractéristique du mouvement, s’écrit aussi :
d LO
dt
R
≈ Vp × LO
avec
Vp = −
ml
mgl
mgl
g=
ez ≈
ez
LO
LO
I 3V
ce qui montre que LO , de norme constante, tourne par rapport à R avec une vitesse angulaire Vp
portée par la direction du champ extérieur (cf. chapitre 3). Cette vitesse V p est la vitesse angulaire de
précession.
Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
441
z
z
A
g
A
L
H
θ0
C
y
O
x
F IG . 26.5.
On peut retrouver cette vitesse de précession en procédant d’une autre façon, plus progressive : si
l’on désigne par A et A les extrémités du vecteur L O, aux instants t et t + d t (Fig. 26.5), on a :
d LO
dt
=
R
AA
dc
= L O sin u0
eu
dt
dt
et OC × mg = mgl sin u 0 eu
puisque ez × ez = − sin u e u . On en déduit, d’après le théorème du moment cinétique : ċ = mgl/LO .
Retenons donc l’expression suivante de la vitesse de précession en fonction du moment d’inertie
I3 par rapport à l’axe de révolution et de la vitesse de rotation propre V :
Vp =
mgl
gl
ez = 2 ez
I3 V
RV
R étant le rayon de giration : I 3 = mR2 .
Ordre de grandeur : Pour une toupie conique, de hauteur h = 5 cm et de rayon de base R b = 3 cm,
qui tourne à la vitesse de 30 tr . s−1, on trouve, puisque l = 3h/4 et I 3 = 3mR2b/10 :
Vp =
5gh
5 × 9, 80 × 0, 05
mgl
= 2 ≈
≈ 7, 2 rad . s−1
2Rb V 2 × 9 × 10 −4 × 2p × 30
IV
La durée d’une précession complète est donc T p = 2p/V p = 0, 87 s
c Dunod – Toute reproduction non autorisée est un délit
III . 3 . — Stabilité gyroscopique
Une grande rotation autour de l’axe de révolution confère au solide en mouvement une grande
stabilité puisque, comme nous l’avons vu, l’effet d’une force verticale, comme le poids, est de déplacer
le centre de masse, non pas dans un plan vertical, mais dans un plan horizontal.
On peut illustrer cette stabilité à l’aide d’un cerceau (masse m et rayon r) qui roule sans glisser
sur un plan horizontal. L’expérience courante nous apprend que ce système se maintient verticalement
si la rotation est suffisante et qu’une légère perturbation par rapport au plan vertical est facilement
neutralisée. On l’interprète à l’aide du théorème du moment cinétique, appliqué au point géométrique
de contact I mobile, par lequel passe constamment la réaction qu’exerce le sol :
d LI
+ vI × mvC = IC × mg avec L I = LC + IC × mv C ≈ 2mr 2V
dt
Comme vI et vC sont pratiquement colinéaires dans l’approximation gyroscopique, le terme complémentaire vI × mv C est négligeable. Quant à l’influence du poids lorsque le cerceau s’écarte d’un plan
vertical, elle se traduit par une variation horizontale d LI du moment cinétique et par conséquent par
une précession de l’axe du cerceau autour de la verticale (Fig. 26.6). Ainsi le cerceau garde son inclinaison par rapport à la verticale sous l’effet du poids ou de toute autre force verticale.
442
26. Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
Remarque : C’est par un raisonnement analogue que l’on serait tenté d’expliquer la bonne stabilité
d’une bicyclette en mouvement dans une position verticale, si la rotation propre des roues
est suffisante. Une analyse minutieuse montre que c’est, en réalité, la force centrifuge dans
le référentiel non galiléen lié au vélo qui permet d’expliquer cette stabilité.
z
g
C
LC
O
x
y
LI
dLI = IC ×mg
I
F IG . 26.6.
III . 4 . — Interprétation de la précession des équinoxes
On sait que le Soleil se trouve apparemment dans le plan de l’écliptique, c’est-à-dire dans le plan
du mouvement de révolution du centre de la Terre autour du Soleil (cf. chapitre 13). Il semble donc
percer, deux fois dans l’année, le plan équatorial terrestre, une première fois à l’équinoxe de printemps
où il émerge du plan équatorial, et une seconde fois à l’équinoxe d’automne où il passe en-dessous de
ce plan (Fig. 26.7a).
La précession des équinoxes est la très lente variation de la position apparente du Soleil, dans le
ciel, à chaque printemps, ce que l’on attribue à la sphéricité imparfaite de la Terre ; on sait, en effet,
depuis Newton, que la Terre est renflée à l’Équateur. Le moment des actions gravitationnelles dues aux
autres astres, en T, n’est donc pas nul. On montre qu’une expression suffisament précise de ce moment
est la suivante :
3
MS
ML
et I 3 > I 1
M T = A sin(2u) e u avec A = − G(I3 − I1)
3 + 3
4
rS
rL
G étant la constante de gravitation (cette expression est la moitié de celle établie de façon simpliste
en exercice au chapitre 6). La présence de la différence des moments d’inertie, I3 − I 1 , rappelle que
ces actions sont liées au défaut de symétrie de la Terre. Les contributions solaire et lunaire apparaissent
par le rapport MK/r 3, M K étant la masse de l’astre exerçant la force et r la distance au centre de la
Terre, comme dans les marées. L’influence de la Lune est donc 2,17 fois plus forte que celle du Soleil
(cf. chapitre 7).
z
Plan équatorial
N
23 ◦ 26
θ0
y
A
w
T
Soleil
H
Plan de l'écliptique
z0
E
Terre
A
x0
a)
b)
F IG . 26.7.
Terre
S
Ligne des nœuds
P
y0
ψ
x
u φ
443
Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
Dans le référentiel géocentrique R g , le mouvement de la Terre peut donc être considéré comme un
mouvement de Lagrange et Poisson dans l’approximation gyroscopique : en effet, la vitesse de rotation
propre V = ḟ ≈ 7, 3 × 10 −5 rad . s−1 est très grande devant la vitesse de précession Vp ; en outre
l’angle de nutation u que fait l’axe de révolution avec l’axe perpendiculaire au plan de l’écliptique est
pratiquement constant et vaut u 0 ≈ 23, 5◦.
Par analogie avec le cas de la toupie dans l’approximation gyroscopique, où ċ = mgl/LO si le
moment en O est MO = OC × mg = mgl sin u e u, on trouve la vitesse de précession :
ċ =
A sin(2u)/ sin u
I3ḟ
3 I3 − I1
=− G
2
I3
M S ML
+ 3
r 3S
rL
cos u
ḟ
On simplifie le calcul de ċ en rappelant que T2a /rS3 = 4p2/(GMS ) (3 e loi de Kepler) et que
ḟ = 2p/Tj , Ta et T j étant respectivement les périodes annuelle et journalière :
ċ = −
3 I 3 − I1 MS
cos u
× 3, 17 ×
= −3p × 3, 17 ×
G
3
2
2p/Tj
I3
rS
I 3 − I1
I3
Tj
T 2a
cos u
On en déduit l’angle de précession des équinoxes après une année :
ċTa = −3p × 3, 17 ×
I3 − I1
I3
Tj
cos u
Ta
Comme Ta = 365, 25 T j , (I3 − I1 )/I 3 = 1/306 et cos u0 = 0, 917, on trouve la valeur suivante :
ċT a ≈ −2, 45 × 10−4 rad
et
T=
2p
2p
T a ≈ 259 T a ≈ 259 siècles
=
245 × 10 −6
|ċ|
Remarquons que, depuis environ 2 000 ans, le déplacement a été de 27, 8 ◦ ; c’est pratiquement
360◦ /12 = 30 ◦, c’est-à-dire la distance angulaire qui sépare deux constellations successives de l’ensemble des douze constellations que semble parcourir le Soleil, de façon uniforme, au cours de sa révolution annuelle apparente. Cet ensemble de constellations est le zodiaque (bestiaire en grec) : Bélier,
Taureau, Gémeaux, Cancer, Lion, Vierge, Balance, Scorpion, Sagittaire, Capricorne, Verseau, Poissons.
c Dunod – Toute reproduction non autorisée est un délit
Il y a 2 000 ans, le Soleil se trouvait dans la constellation du Bélier le jour de l’équinoxe de
printemps (20-21 mars), alors qu’à cette même date de l’année, il était, en 2007, dans celle des Poissons
(une constellation en arrière en raison du signe moins).
Ainsi, il existe un décalage continuel entre la constellation dans laquelle se trouvait effectivement
le Soleil le jour de notre naissance et le signe zodiacal que les adeptes de l’astrologie attribuent à chacun
d’entre nous, en affirmant prévoir notre avenir, évidemment dans un contexte plus psychologique et
commercial que scientifique !
IV . — L’APPROXIMATION GYROSCOPIQUE EN MAGNÉTISME
L’interaction d’un dipôle magnétique rigide et d’un champ magnétique fournit un exemple important de mouvement dans l’approximation gyroscopique.
IV . 1 . — Interaction d’un moment magnétique avec un champ magnétique
Considérons un petit barreau magnétique caractérisé par un moment magnétique m porté par sa
direction principale (Fig. 26.8a). On montre qu’une telle grandeur vectorielle traduit l’interaction du
dipôle avec un champ magnétique appliqué B (cf. Électromagnétisme) : un tel champ exerce en effet
sur le dipôle un moment de force, en son centre de masse, d’expression : m × B.
444
26. Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
L’application du théorème du moment cinétique au centre de masse du dipôle, par rapport au référentiel du laboratoire R, donne l’équation vectorielle suivante :
d LC
dt
R
= m×B
Or, l’expérience et l’analyse montrent qu’il existe une relation de proportionnalité entre le moment
magnétique d’un tel dipôle et son moment cinétique :
m = gL C
La quantité g est appelée le coefficient gyromagnétique.
B
B
μ
C
O
μ
v
r
A
a)
−e
b)
F IG . 26.8.
On peut montrer qu’il en est bien ainsi dans la représentation simpliste que Bohr fait de l’atome
d’hydrogène : l’électron (charge −e ), en mouvement circulaire autour du proton, est assimilé à une
petite spire conductrice parcourue par un courant (Fig. 26.8b). Le moment magnétique de cette spire
élémentaire a pour expression (cf. Électromagnétisme) :
dq 2
−e 2
−evr
pr n =
pr n =
n
dt
2
T
où S est l’aire du disque défini par la trajectoire circulaire, n la normale orientée de ce disque, v la
vitesse du mouvement orbital et T = 2pr/v la période de révolution du mouvement de l’électron.
Comme le moment cinétique L O au centre O du noyau est : LO = OA × me v = me vr ez on a bien :
m = iS n =
m = g(e) LO
avec
g(e) = −
e
2m e
On voit que g a les dimensions d’une charge électrique massique.
IV . 2 . — Précession d’un moment magnétique
Le théorème du moment cinétique donne donc, pour un dipôle magnétique m soumis à un champ
magnétique B :
d LC
= gL C × B = −gB × L C
dt R
soit :
d LC
= VL × LC avec V L = −gB
dt R
Dans le cas d’un électron orbitant autour d’un noyau, cette vitesse angulaire, dite de Larmor, a pour
expression :
e
B
VL = −g (e) B =
2m e
445
Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
Ainsi, comme pour la toupie dans l’approximation gyroscopique, le vecteur moment cinétique a une
norme constante et une projection selon la direction du champ magnétique constante. Par conséquent,
le moment magnétique précessionne autour de B avec une vitesse angulaire proportionnelle à B.
Ordre de grandeur : Calculons V L pour l’atome de Bohr dans un champ magnétique, de l’ordre
de 1 T :
1, 6 × 10−19
eB
≈ 0, 88 × 1011 rad . s−1
VL ≈
=
−30
2m e
2 × 0, 91 × 10
Il est instructif de comparer cette valeur à la vitesse angulaire de l’électron sur son orbite. Dans l’état
fondamental de l’atome d’hydrogène on a (cf. Quantique) :
aB ≈ 53 pm
v≈
c
≈ 2 × 106 m . s −1 d’où
137
v
≈ 4 × 1016 rad . s −1
aB
et
VL
1
v/a B
On en déduit que la perturbation apportée par le champ magnétique au mouvement orbital de l’électron
est très faible. Ce résultat est connu sous le nom de théorème de Larmor (cf. Électromagnétisme).
IV . 3 . — Relaxation
Sous l’action de forces antagonistes, dues par exemple à l’agitation thermique ou à la simple présence de dipôles magnétiques identiques dans le voisinage, on observe un phénomène de relaxation : la
précession ralentit progressivement jusqu’à devenir nulle lorsque le moment du dipôle magnétique est
orienté selon la direction et le sens du champ B. On retrouve ici une situation analogue à celle de la
toupie qui, du fait d’une relaxation dû aux frottements, finit par s’orienter suivant le champ de pesanteur.
IV . 4 . — Résonance magnétique nucléaire
c Dunod – Toute reproduction non autorisée est un délit
La résonance magnétique nucléaire (RMN) est une technique inventée séparément par les physiciens américains E. Purcell et F. Bloch en 1946. On soumet les moments magnétiques nucléaires intrinsèques, dit de spin S , de la matière condensée (liquide ou solide) à un fort champ magnétique uniforme,
B0 = B0 ez , de l’ordre de quelques teslas (cf. Quantique). Pour réaliser des champs aussi intenses, on
utilise un électro-aimant à supraconducteurs que l’on plonge dans de l’hélium liquide (Fig. 26.9a).
D’après ce qui précède, ce champ magnétique produit une précession des moments magnétiques
de spin, avec une vitesse angulaire qui vaut VL = gsB 0, si gs est le coefficient gyromagnétique de
spin du noyau, c’est-à-dire le rapport entre son moment magnétique intrinsèque ms et son spin. En
raison de la relaxation, les moments magnétiques s’alignent selon B0 , soit en position parallèle, soit
en position antiparallèle. L’énergie d’interaction magnétique −ms · B 0 (cf. Électromagnétisme) prend
donc les deux valeurs suivantes :
E− = −m s,zB0
et E+ = ms,z B0
où ms,z est la projection, suivant l’axe Oz défini par B0 , du moment magnétique de m s . On dit que
B0 lève la dégénérescence des niveaux d’énergie ; l’écartement énergétique vaut alors :
DE = ms,z B0 − (−m s,z B0) = 2m s,zB 0
Pour un noyau à un seul proton, m s,z vaut (cf. Quantique) :
m s,z = mN
avec
mN =
e
≈ 5, 05 × 10−27 J.T−1
2mp
446
26. Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
On soumet, en outre, l’échantillon à un champ magnétique supplémentaire b = b m ex , produit par
une bobine. Ce champ, beaucoup plus faible que B0 , est orthogonal à ce dernier et tourne à la vitesse
angulaire V ez autour de la direction de B 0 (Fig. 26.9b).
Vide Échantillon
Vide
z
Azote
liquide
Hélium
liquide
Hélium
liquide
Azote
liquide
B0
B0
mN pour b 0
y
y
O
mN pour b 0
Vt
(résonnance)
b
x
x
Bobines
supraconductrices
Enceinte
Générateur
HF
Bobines supraconductrices
a)
b)
F IG . 26.9.
Appliquons le théorème du moment cinétique, au dipôle magnétique de moment m N , en son centre
de masse, par rapport au référentiel du laboratoire R. On a, puisque R est galiléen :
dS
dt
R
= m N × (B 0 + b)
d’où
dS
dt
R
= −g (s N) (B0 + b) × S
puisque mN = g(s N) S , g (s N) étant le coefficient gyromagnétique de spin du noyau.
Dans le référentiel R , qui tourne autour de Oz , à la vitesse angulaire V = V e z par rapport à
R , les champs B0 et b sont stationnaires. Il vient donc, d’après la formule de Bour (cf. chapitre 3) :
dS
dt
ce qui donne :
dS
dt
R
= −g(s N)
R
+ V × S = −g (s N) (B0 + b) × S
B0 + b +
V
(N )
gs
×S
soit
dS
dt
R
= V× S
en introduisant :
V0 = −g(s N) B0
V b = −g(s N) b
et V = V0 + V b − V ez
Ainsi, le moment magnétique mN précessionne autour de l’axe Oz , avec le vecteur vitesse angulaire V .
Si la condition V = V0 , dite de résonance, est satisfaite, on a :
V = Vb = −g (s N)b
Ainsi, à la résonance, le moment magnétique mN précessionne autour de b, avec la vitesse angulaire
(N )
Vb = −g s b, puis finit par s’orienter selon b en raison de la relaxation.
Cette technique permet d’accéder, par l’intermédiaire de la pulsation V du champ tournant, aux
facteurs gyromagnétiques des noyaux, précisément des protons pour l’hydrogène. Comme ces facteurs
varient avec l’environnement spatial de ces protons, on en tire des informations précieuses sur cet
Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
447
environnement. Si s(r) caractérise cet environnement des protons dans l’échantillon considéré, la
condition de résonance s’explicite selon :
V(r) = V0 [1 − s(r)] avec V 0 = g(s p) B0
Le coefficient gyroscopique de spin du proton s’écrit (cf. Quantique) :
mN
e
e
avec g(s p) ≈ 5, 585 et
g(s p) = g(s p)
=
2m p
2mp
Ordre de grandeur : Comme g(s p) ≈ 26, 87 × 10 7 rad.s−1 .T−1
V
V = 26, 87 × 10 7 × B0 et n =
= 42,6 × 106 × B 0
2p
pour la fréquence. On en déduit la fréquence correspondante en MHz : n ≈ 300 MHz pour B 0 = 7 T .
L’utilisation d’un champ magnétique B0 très intense permet d’obtenir une très grande sensibilité. Le
domaine électromagnétique concerné est celui de la radio ( l = c/n = 10 m).
V . — MOUVEMENT DE POINSOT
V . 1 . — Définition
On appelle mouvement de Poinsot (du nom du mathématicien français L. Poinsot) le mouvement
d’un solide autour d’un point fixe O tel qu’en ce point le moment des actions extérieures soit nul.
Ce mouvement serait, par exemple, celui d’un ballon de rugby soumis à la seule action de la pesanteur, dans le référentiel du centre de masse. En effet, dans R ∗ d’origine C, le moment du poids en
ce point est nul.
V . 2 . — Propriété fondamentale
Comme M O = 0, L O = Cte. D’autre part, la puissance des actions en O, MO · V, étant nulle,
E k = Cte.
Dans un mouvement de Poinsot, le moment cinétique et l’énergie cinétique se conservent.
c Dunod – Toute reproduction non autorisée est un délit
V . 3 . — Équations d’Euler d’un solide
L’étude du mouvement d’un solide S autour d’un point nécessite évidemment trois équations dans
lesquelles n’apparaissent pas les inconnues que sont les composantes de R. Aussi est-il judicieux d’appliquer le théorème du moment cinétique au point fixe O, où le moment des actions de contact est nul.
Si le référentiel d’analyse est le référentiel terrestre R, le moment des forces extérieures se réduit
à celui de forces connues M O, car R est appproximativement galiléen. Désignons par L O le moment
cinétique de S par rapport à R au point de fixation O pris comme origine de R. Il vient :
d LO
= MO
dt R
Rappelons que si le référentiel d’analyse est R ∗ , le théorème du moment cinétique en C s’écrit
aussi simplement, sans intervention des forces d’inertie :
d L∗C
= MC
dt
Associons au solide S le repère principal d’inertie R = Ox y z . Si V est le vecteur vitesse de
rotation de S par rapport à R, on a la relation suivante entre l’opérateur d’inertie [I ] O, V et L O :
LO = [I]O V
448
26. Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
Dans la base de R , [I ]O , V et LO s’écrivent respectivement :
R
I1
0
0
0
I2
0
0
0
I3
V1
V2
R V 3
et
R
I1V 1
I2V 2
I3V 3
En tenant compte de la formule de Bour, on obtient :
d LO
dt
d LO
dt
=
R
R
+ V × L O = MO
ce qui se projette selon :
I1 V̇1
V1
I1 V1
M1
V2 ×
I2 V2 =
M2
I2 V̇2 +
V
V
I
3
3 3
R I3 V̇3
R
R
R M3
On en déduit les trois équations suivantes du mouvement du solide autour d’un point :
I1V̇ 1 + (I3 − I2)V 2 V3 = M 1
I2V̇ 2 + (I1 − I3)V 3 V1 = M 2
I3V̇ 3 + (I2 − I1)V 1 V2 = M 3
Ces équations du mouvement, exprimées en fonction des composantes du vecteur vitesse de rotation du
solide, ont été établies par Euler, d’où leur nom équations d’Euler.
Précisons que, dans ces équations, M O et V apparaissent par leurs composantes dans la base de
R lié au solide. Aussi ces trois équations sont-elles généralement difficiles à exploiter. Nous allons voir
cependant qu’elles sont très instructives.
V . 4 . — Vitesses de rotation stationnaires
Les équations d’Euler permettent d’établir le résultat suivant concernant la conservation de la vitesse angulaire de rotation d’un solide au cours du mouvement :
Toute rotation d’un solide autour d’un axe principal d’inertie est stationnaire.
Montrons-le à partir des équations d’Euler, qui s’écrivent dans ce cas :
I1 V̇1 + (I3 − I2 )V 2V 3 = 0
I2 V̇2 + (I1 − I3 )V 3V 1 = 0
I3 V̇3 + (I2 − I1 )V 1V 2 = 0
Notons d’abord que, si V est fixe par rapport à R, il l’est aussi par rapport à S . En effet, d’après la
composition des dérivations de Bour, on a :
dV
dt
=
R
dV
dt
S
+V×V =
dV
dt
S
Plusieurs cas doivent être considérés.
a) La matrice principale est quelconque (I1 = I2 = I3 )
Les trois solutions suivantes, pour lesquelles deux des composantes de v sont nulles, satisfont aux
équations d’Euler :
i) V1 = Cte V3 = V2 = 0 ii) V 2 = Cte V1 = V3 = 0 iii) V 3 = Cte V1 = V 2 = 0.
Le vecteur V est donc dirigé suivant l’un des axes principaux Ox , Oy, Oz .
449
Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
b) La matrice principale est cylindrique (I1 = I2 = I3)
Dans ce cas de symétrie cylindrique, les deux solutions suivantes satisfont aux équations d’Euler :
i) V3 = Cte V1 = V2 = 0 ii) V 1 = Cte V2 = Cte V3 = 0.
La rotation s’effectue donc à vitesse angulaire constante, soit suivant l’axe Oz , soit suivant un axe
perpendiculaire à Oz, ce qui confirme la proposition énoncée.
Exemple : La rotation d’un ballon de rugby autour de son axe de révolution ou autour d’un axe
perpendiculaire est stationnaire (Fig. 26.10a). En revanche, une rotation, portée par un axe quelconque,
varie au cours du temps.
c) La matrice principale est sphérique (I1 = I 2 = I 3)
Dans ce cas de symétrie sphérique, où tout axe est principal d’inertie, toute vitesse de rotation est
solution stationnaire des équations d’Euler.
Exemple : C’est le cas d’un ballon de football (Fig. 26.10b) ; en raison de la symétrie sphérique,
toute rotation initiale est stationnaire.
V
z
z
V
V
C
C
g
g
y
O
y
O
x
x
a)
b)
F IG . 26.10.
V . 5 . — Mouvement de Poinsot d’un solide ayant une symétrie matérielle de révolution
Le moment cinétique en O étant une constante vectorielle, choisissons, pour rendre les calculs
plus commodes, l’axe Oz de R suivant LO (Fig. 26.11).
c Dunod – Toute reproduction non autorisée est un délit
z
z
LO
θ
g
φ
O
x
ψ
y
w
y
φ
u x
F IG . 26.11.
a) Caractéristiques du mouvement
Exprimons, dans la base intermédiaire du repère de Resal, (e u , ew , ez ), le moment cinétique
LO/R. Cette base est base principale d’inertie du fait de la symétrie matérielle de révolution : l’opérateur d’inertie [I ]O a donc même expression dans R et dans Re = Ouwz.
450
26. Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
Quant à V et L O , ils s’écrivent, en fonction des angles d’Euler :
u̇
I 1u̇
ċ sin u
et
I 1ċ sin u
R e ċ cos u + ḟ
Re I 3 ( ċ cos u + ḟ)
Comme LO/R s’écrit aussi LO/R = L sin u e w + L cos u ez , L étant sa norme, les trois équations
différentielles du mouvement de Poinsot sont les suivantes :
I1 ċ sin u = L sin u
I1u̇ = 0
Par conséquent, pourvu que 0 < u < p, on a :
u = Cte
ċ =
L
= Cte
I1
ḟ =
et
I 3( ċ cos u + ḟ) = L cos u
1
1
L
− ċ cos u = L cos u
−
I3
I 3 I1
= Cte
Dans un mouvement de Poinsot d’un solide ayant la symétrie de révolution, l’angle de nutation
ainsi que les vitesses angulaires de précession et de rotation propre sont stationnaires.
b) Conséquences
i) La norme de V est constante :
u̇2 + ċ2 sin 2 u + ( ċ cos u + ẇ)2 = Cte
ii) Sa composante V z suivant Oz est une constante. Donc, le vecteur V décrit, dans R , un
cône avec la vitesse de rotation −ḟ définie à partir de l’angle (Ox , Ou) = −f. Ce cône, relatif au
référentiel R lié au solide, est appelé le cône du solide. Son angle au sommet a est relié à l’angle de
nutation u par la relation :
I3
ċ sin u
L sin u/I 1
Vw
=
=
= tan u
tan a =
I1
L cos u/I 3
Vz
ċ cos u + ḟ
iii) La composante V z suivant Oz est aussi une constante ; V décrit donc dans R un cône avec
la vitesse ċ définie à partir de l’angle c = (Ox, Ou). Comme ce cône est lié à R, on l’appelle cône
de base.
Les figures 26.12a et 26.12b représentent le cône du solide et le cône de base dans les cas où a > u
et a < u respectivement. Ces deux cônes sont tangents suivant l’axe portant V. Ce dernier étant un
axe instantané de rotation, le cône du solide roule sans glisser sur le cône de base, d’où le nom de cône
roulant qu’on lui donne parfois.
z
µ
z
Cône du solide
µ
Cône de base
V
®
O
Ã
x
z
y
w
Cône du solide
z
V
y
w
®
y
O
Ã
Á x
Cône de base
x
u
y
Á x
u
a)
b)
F IG . 26.12.
451
Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
c) Exemple : mouvement de Poinsot de la Terre
La Terre peut être assimilée à un solide de révolution autour de l’axe des pôles Oz , tel que I 3 > I1
puisqu’elle est renflée à l’équateur. En première approximation, le moment des actions gravitationnelles
qui s’exercent sur elle, en son centre T, est nul. Le vecteur vitesse angulaire devrait donc, selon la
théorie précédente, tourner autour de Oz avec la vitesse angulaire − ḟ. Exprimons V z en fonction
de u :
L cos u
L cos u
Vz = ċ cos u + ḟ =
+ ḟ =
d’où :
I1
I3
− ḟ = L cos u
1
1
−
I1
I3
=
L cos u
I3
I 3 − I1
I1
= Vz
I 3 − I1
I1
≈
V z
305
car
1
I 3 − I1
≈
305
I1
Comme la période de rotation autour de Oz est de 1 jour, celle de cette précession, dite « libre » par
opposition à celle due à l’action gravitationnelle non nulle du Soleil, est de 305 jours. On a observé
un phénomène analogue de précession de V autour de Oz avec une période de 400 jours et une
amplitude angulaire d’environ 15 secondes d’arc. L’écart de période avec les prévisions de la théorie
précédente a été expliqué par Newcomb, à la fin du siècle dernier, à partir des déformations de la Terre
sous l’effet de sa rotation.
VI . — MOUVEMENT DE LAGRANGE ET POISSON
VI . 1 . — Définition
On appelle mouvement de Lagrange et Poisson le mouvement d’un solide homogène ayant la
symétrie matérielle de révolution, mobile autour d’un point fixe O et soumis à des forces dont le
moment en O est dirigé suivant la ligne des nœuds Ou (Fig. 26.13).
Une grande variété de solides physiques (toupie, instruments gyroscopiques de navigation, mouvement de la Terre dans le référentiel du centre de masse, etc.) ont un tel mouvement.
z
z
c Dunod – Toute reproduction non autorisée est un délit
g
θ
y
C
φ
y
O
ψ
x
w
u
φ
x
F IG . 26.13.
VI . 2 . — Équations du mouvement d’une toupie symétrique dans le champ de pesanteur
Le moment du poids, M O = OC × mg, est colinéaire à la ligne des nœuds Ou. La toupie en
mouvement autour du point fixe O possède trois degrés de liberté que l’on prend égaux aux angles
d’Euler. Nous devons par conséquent trouver trois équations scalaires dans lesquelles figurent comme
seules inconnues c, u, f. C’est ce que fournit le théorème du moment cinétique appliqué en O par
452
26. Gyroscope. Mouvement d’un solide autour d’un point. Effets microscopiques
rapport à R. Comme la liaison sphérique en O est supposée parfaite, le moment en ce point des actions
de contact est nul. Donc :
d LO/R
= OC × mg
dt
R
Il est commode d’expliciter cette relation dans la base de Resal : Commençons par exprimer
LO/R :
u̇
I 1u̇
I1 0 0
0 I1 0
ċ sin u
I 1