TP 1 : Systèmes Asservis Linéaires avec Matlab et carte d’interface
Telechargé par
shiro uzumaki

L3 AUTOMATIQUE TRAVAUX PRATIQUES
1
USTO, Département d’Automatique « Z.BELLAHCENE »
I. Objectifs du TP
1. L’étudiant, après une étude théorique des systèmes proposés, devra réaliser un fichier exécutable
sous Matlab afin d’analyser les réponses de ces systèmes à des entrées différentes selon le modèle
proposé.
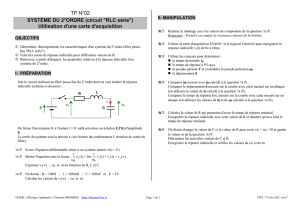
2. En utilisant la carte interface enfichable « simulation de système réglé SO4201-5U » voir figure.1
l’étudiant doit déterminer les caractéristiques dynamiques des systèmes de 1er ordre (P-T1) et de 2éme
ordre (P-T2=2*P-T1en série).
Figure .1 : carte interface enfichable SO4201-5U
Expérience 1 :
On désigne par élément PT1 un élément de retard de premier ordre pour lequel la relation entre la
grandeur d'entrée y(t) et la grandeur de sortie x(t) peut être exprimée par :
Le paramètre KP coefficient d'action proportionnelle et le paramètre T, constante de temps de
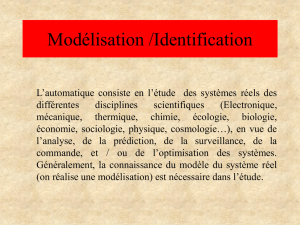
l'élément (P-T1). Le graphique suivant illustre la réponse indicielle et le symbole fonctionnel de
l'élément (P-T1).
Figure .2. Réponse indicielle du système de de 1er ordre
La constante de temps T indique ici la rapidité avec laquelle la grandeur de sortie tend vers la valeur
finale. La formule de l'allure de la grandeur de sortie pour t > 0 est la suivante :
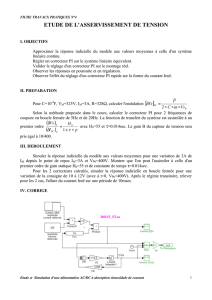
La méthode des 63% repose sur le principe qu'après écoulement de la constante de temps T, la
grandeur de sortie a tout juste atteint 63% de sa valeur finale. Ceci peut être déduit directement de
l'équation de la réponse indicielle indiquée ci-dessus en prenant la valeur T pour le temps t. Le résultat
obtenu pour la grandeur de sortie est en effet :
TP N°1: Etude des Systèmes Asservis Linéaires en
utilisant une carte d’interface et Matlab

L3 AUTOMATIQUE TRAVAUX PRATIQUES
2
USTO, Département d’Automatique « Z.BELLAHCENE »
Figure .3. Détermination de la constante de temps T a partir de la réponse indicielle.
L'expérience suivante a pour objectif de déterminer les réponses indicielles des deux éléments P-T1 de
l'élément gauche de la carte interface "Simulation de systèmes réglés" (SO4201-5U). Il s'agira de
déterminer le coefficient d'action proportionnelle KP1 et la constante de temps T1 à partir de la réponse
indicielle.
1. Effectuer tout d'abord le montage du circuit d'expérimentation suivant :
Figure .4. Montage d’expérience de l’élément P-T1 gauche.
Activez le traceur de réponse indicielle et configurez-le suivant les indications figurant dans le tableau
ci-dessous.
Table 1 Paramètre de l’affichage de la réponse indicielle P-T1
2. Déterminez la réponse indicielle de l'élément P-T1 gauche.
3. A partir de graphe déterminer les caractéristiques correspondantes à cette réponse (T1 et Kp1)
suivant les deux méthodes ainsi que la fonction de transfert.
Expérience 1.1 : Diagramme de Bode de l’élément P-T1
Dans l'expérience qui va suivre, nous allons déterminer le diagramme de Bode de l'élément P-T1, déjà
examiné au cours de l'expérience précédente.
La méthode des 63%
La méthode de la tangente

L3 AUTOMATIQUE TRAVAUX PRATIQUES
3
USTO, Département d’Automatique « Z.BELLAHCENE »
Figure .5. Montage d’expérience de l’élément P-T1 gauche pour la courbe de Bode.
1. Montez tout d'abord le circuit d'expérimentation représenté ci-dessous.
2. Activez maintenant le traceur de courbes de Bode et configurez-le suivant le tableau ci-dessous
Table 2 Paramètre de l’affichage de la courbe de Bode P-T1
3. Déterminez maintenant le diagramme de Bode et expliqué le tracé obtenu.
Exemple 1 « Matlab »: Considérons le système de la figure 6, dans le cas ou on suppose que le débit
de sortie est proportionnel à la hauteur de liquide, le système est décrit par le modèle différentiel
suivant :
is
s
dh
S q q
dt h
qR
Figure .6 : Bac de stockage
1. Donner la fonction de transfert de ce système qi sur la sortie h. quelle est sa forme ?
2. Pour SR=20, simuler la réponse de ce système a une entrée échelon unitaire.
3. Donner sur le graphe les caractéristiques de la réponse en régime transitoire suivantes :
tr : temps de réponse à 5% c-à-d le temps au bout du quel la réponse atteint 95% de sa valeur
finale. τ : constante de temps à 63% de sa valeur en régime permanant.
Ou S est la section du bac, qi le débit d’alimentation, qs le débit de sortie et R la
résistance à l’écoulement.

L3 AUTOMATIQUE TRAVAUX PRATIQUES
4
USTO, Département d’Automatique « Z.BELLAHCENE »
4. Comparer ces deux valeurs avec les valeurs théoriques.
5. Faites varier la constante de temps (
10, 20, 30.
) du système et tracer les réponses
indicielles correspondantes dans la même figure. Faite vos conclusion sur l’influence de la
constante de temps sur les allures obtenues ;
6. Tracer alors les allures des courbes dans le diagramme de Bode et Nyquist correspondant au
système en BO. « faite l’étude théorique »
II. Analyse sous Simulink
1. Dans Simulink représenter le processus de la fig.7 par le bloc Transfer Fcn. Sauvegarder le sous le
nom tp1.mdl
2. Observer sur l’oscilloscope l’évolution de sa réponse à un échelon d’amplitudes 1 et 5;
Changer l’entré échelon par une rampe de pente 2 et visualiser les résultats ; lancer la simulation après
avoir choisi les paramètres de simulation : solver ode45, la durée de simulation (20s) et Diagnostic :
Automatic solver parameter selection, none. Observer les résultats dans l’oscilloscope et tirer les
performances du système.
Figure. 7: tp1.mdl
Expérience 2 :
L'élément P-T2 (élément de retard de second ordre) s'exprime par l'équation différentielle :
Le paramètre T représente la constante de temps de l'élément, D son amortissement et KP son
coefficient d'action proportionnelle. En fonction de l'importance de l'amortissement D, le système
affiche un comportement différent :
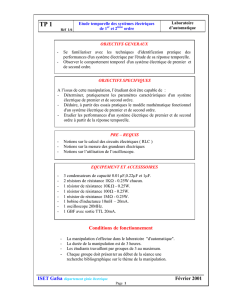
D > 1 :
L'élément P-T2 peut être considéré dans ce cas comme un couplage en série de deux éléments
PT1. L'allure de la réponse indicielle du système est apériodique.
D < 1 :
Dans ce cas, l'élément P-T2 est apte à osciller. L'allure de la réponse indicielle du système est
donc oscillatoire. Dans le cas limite D = 0, l'oscillation n'est pas amortie.
Le graphique suivant illustre la réponse indicielle et le symbole fonctionnel de l'élément P-T2 dans les
deux cas.
Figure. 8 : Réponse indicielle P-T2
L'expérience suivante a pour but de déterminer la réponse indicielle du couplage en série des deux
éléments P-T1 de la carte interface "Simulation de systèmes réglés" (SO4201-5U).
1. Effectuer tout d'abord le montage du circuit d'expérimentation suivant.
1
den(s)
Transfer Fcn Scope
Ramp
D = ξ

L3 AUTOMATIQUE TRAVAUX PRATIQUES
5
USTO, Département d’Automatique « Z.BELLAHCENE »
Figure. 8 : Montage d’expérience de l’élément P-T1 gauche et droit en série.
Activez le traceur de réponse indicielle et configurez-le suivant les indications figurant dans le tableau
ci-dessous.
Table 2 Paramètre de l’affichage de l’élément P-T1 gauche et droit en série.
2. Déterminez la réponse indicielle de l'élément P-T1 gauche et droit en série.
3. A partir de graphe déterminer les caractéristiques correspondantes.
Exemple 2 « Matlab »: On considère le système mécanique donné par (Fig.9) amortisseur – ressort
.On considère que la force f (t) est l’entrée du système et que y(t) est la valeur de sortie. y(t) est la
position mesurée par rapport à la position d’équilibre.
Amortisseur d’un véhicule automobile Schématisation du mécanisme Modélisation par
schéma bloc.Le système est constitué, en plus de la masse
M
, d’un ressort de raideur
k
et d’un
amortisseur de coefficient .
1. Déterminer la fonction de transfert de ce système ;
2. Déterminer
0
( , , )wK
par identification.
3. Si k=20 N/m, M=5kg,μ=12.5 N/(m/s).
a. Tracer la réponse indicielle dans la même figure pour
0,0.3,0.6,0.9,1,1.3
. Indiquer
sur cette figure la valeur de pour chaque courbe.
b. Tracer la réponse du système à une rampe de pente 2 ;
c. Trouver l’erreur de trainage du système.
Figure .9.
 6
7
6
7
1
/
7
100%