Université de Bejaia
Faculté de technologie
Département de génie électrique
Module : commande avancée
Comptes rendus des TP 1 et 2
Nom de l’étudiant :
BOURENANE Zakaria
Groupe : ELM1
Année universitaire : 2019/2020

TP N°1 : Simulation dans l’espace d’état des systèmes linéaires
I. INTRODUCTION
Il s’agit, dans ce TP, de faire la modélisation et la simulation des systèmes électromécaniques
comme les machines à courant continu. Pour ce faire, nous utiliserons le logiciel MATLAB
auquel est intègre l’outil SIMULINK qui est une plate-forme de simulation multi-domaine et
de modélisation des systèmes dynamiques.
II. PREPARATION
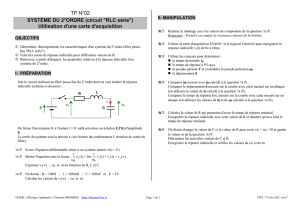
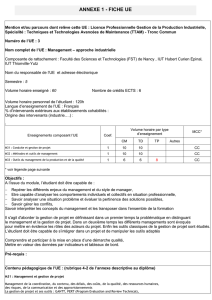
Les équations fondamentales régissant le fonctionnement du MCC sont :
𝐸 = 𝐾𝑒Ω
𝐶𝑒𝑚 = 𝐾𝑒𝐼
𝑈(𝑡) = 𝑅𝑖(𝑡) + 𝐿 𝑑𝑖(𝑡)
𝑑𝑡 + 𝐾𝑒Ω
𝐶𝑒𝑚 − 𝐶𝑟= 𝐽 𝑑Ω
𝑑𝑡
Figure (1) : Schéma d’un MCC
III. RESULTATS DE SIMULATION
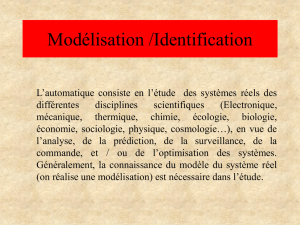
1. Schéma fonctionnel du MCC :
Le schéma fonctionnel du MCC est le suivant :

Figure (2) : Schéma fonctionnel d’un MCC
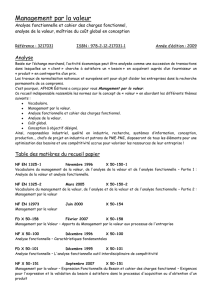
Résultat de la simulation :
Figure (3) : Réponse indicielle du système
Commentaire :
Avant t= 0.1s le système est rapide est stable, et après la réponse indicielle il diminue à cause
de la perturbation qu’on a imposé.
2. Représentation dans l’espace d’état :
Pour la modélisation dans l’espace d’état, on considère deux formes :
1ere forme : Représenter le MCC sous forme :

ẋ(t)= Ax(t)+ 𝐵1u(t)+ 𝐵2 𝐶𝑟(t)
y(t)= Cx(t)+Du(t)
Le vecteur d’état : x(t)= ( 𝑥1 𝑥2) avec 𝑥1(𝑡)= 𝑖(𝑡) et 𝑥2(𝑡)= Ω(𝑡)
L’entrée : 𝑢(𝑡)
La sortie : 𝑦(𝑡)= 𝑥2(𝑡)= Ω(𝑡)
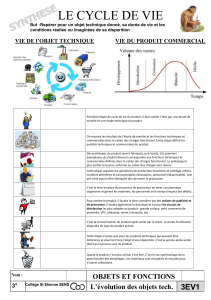
Figure (4) : Schéma fonctionnel d’une représentation d’état 1ere forme
Résultat de la simulation :
Figure (5) : Réponse indicielle du système

Commentaire :
Avant t= 0.1s le système est rapide est stable, et après la réponse indicielle il diminue à cause
de la perturbation qu’on a imposé.
2ere forme : Représentation du MCC sous forme :
ẋ(t)= Ax(t)+Bv(t)
y(t)= Cx(t)+Du(t)
Le vecteur d’état : x(t)= ( 𝑥1 𝑥2) avec 𝑥1(𝑡)= 𝑖(𝑡) et 𝑥2(𝑡)= Ω(𝑡)
L’entrée : 𝑣(𝑡) = (𝑢 𝐶𝑟)
La sortie : 𝑦(𝑡)= 𝑥2(𝑡)= Ω(𝑡)
Figure (6) : Schéma fonctionnel d’une représentation d’état 2ere forme
Résultat de la simulation :
Figure (7) : Réponse indicielle du système
 6
7
6
7
1
/
7
100%