Electronique Analogique Chap.1 : Les quadripôles
2ème STPI Page 1/8
Chapitre 1 :
LES QUADRIPÔLES
I. Définition :
Un quadripôle (ou quadrupôle) est un composant ou circuit (ensemble de composants) à deux entrées
et deux sorties permettant le transfert d’énergie entre deux dipôles.
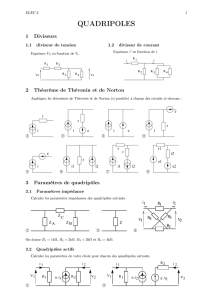
On représente un quadripôle par une boîte noire de deux bornes d’entrée et deux bornes de sorties.
Quatre grandeurs électriques caractérisent un quadripôle :
Le courant 1
Iet la tension 1
V d’entrée.
Le courant 2
Iet la tension 2
V de sortie
Par convention, on donne le sens positif aux courants qui pénètrent le quadripôle.
On distingue deux types de quadripôles :
1. les quadripôles passifs : ne comportent pas de source d’énergie. Il contient que des
composants passifs (R, L, C) ; dans ce cas : se PP
2. Les quadripôles actifs : il peut fournir de l’énergie de façon permanente.
Cas particulier :
Très souvent le quadripôle est en fait un tripôle, c'est-à-dire une borne de l’entrée et une borne de
sortie sont reliées. Ces bornes communes sont le plus souvent reliées à la masse.
Remarque :
L’étude des quadripôles est facilitée par l’utilisation du calcul matricielle.
Exemples :
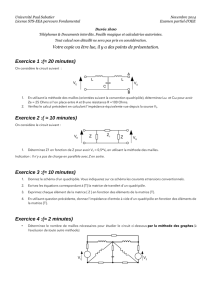
1. Quadripôle série :
112 ZIVV
12 II
Sous forme matricielle :
1
1
2
2
10
1
I
V
Z
I
V
2. Quadripôle parallèle :
1
12 VV
1
1
2I
Z
V
I
Sous forme matricielle :
1
1
2
2
1/1
01
I
V
Z
I
V
Quadripôle
V
2
V
1
I
1
I
2
Quadripôle
2
2'
1
1'
Z
V
1
V
2
I
1
I
2
Z
V
1
V
2
I
1
I
2

Electronique Analogique Chap.1 : Les quadripôles
2ème STPI Page 2/8
II. Représentation matricielle des quadripôles :
Pour relier les 4 paramètres du quadripôle (les deux courants et les deux différences de potentiel), ils
existent 4 représentations matricielles différentes:
- matrices impédances
- matrices admittances
- matrices hybrides
- matrices de transfert.
2.1. Matrices impédances :
On exprime les tensions en fonction des courants ;
2121111 IZIZV
2221212 IZIZV
L’unité des impédances ij
Z sont les ohms (). L’indice i est relatif à la tension et indice j est relatif au
courant. Sous forme matricielle nous avons :
2
1
2221
1211
2
1
I
I
ZZ
ZZ
V
V
Nous allons maintenant nous intéresser à l’interprétation physique de chacun des différents
coefficients de la matrice impédance.
0
1
1
11
2
I
I
V
Z : Impédance vue de l’entrée en laissant la sortie du quadripôle en circuit ouvert ( 0
2I )
0
2
1
12
1
I
I
V
Z: Impédance de transfert inverse ou transimpédance inverse obtenue avec l’entrée du
quadripôle en circuit ouvert ( 0
1I)
0
1
2
21
2
I
I
V
Z: Impédance de transfert transimpédance obtenue avec la sortie du
quadripôle en circuit ouvert ( 0
2I)
0
2
2
22
1
I
I
V
Z: Impédance vue de la sortie en laissant l’entrée du quadripôle en circuit ouvert ( 0
1I)
Ces définitions des coefficients permettent de calculer et de mesurer simplement ceux-ci.
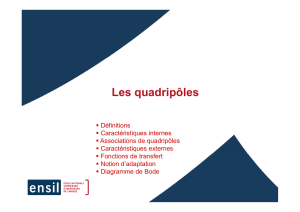
Exemple 1 : quadripôle en T
Calculer les éléments de la matrice [Z] du quadripôle suivant :
2.2. Matrices admittances :
On exprime les courant en fonction des tensions ;
2121111 VYVYI
2221212 VYVYI
L’unité des impédances ij
Y sont les ohms ( 1
) . L’indice i est relatif au courant et indice j est relatif à
la tension. Sous forme matricielle nous avons :
2
1
2221
1211
2
1
V
V
YY
YY
I
I

Electronique Analogique Chap.1 : Les quadripôles
2ème STPI Page 3/8
Nous allons maintenant nous intéresser à l’interprétation physique de chacun des différents
coefficients de la matrice admittance.
0
1
1
11
2
V
V
I
Y: Admittance vue de l’entrée en laissant la sortie du quadripôle en court-circuit ( 0
2V)
0
2
1
12
1
V
V
I
Y: Admittance de transfert inverse inverse obtenue avec l’entrée du
quadripôle en court-circuit ( 0
1V)
0
1
2
21
2
V
V
I
Y: Admittance de transfert direct obtenue avec la sortie du quadripôle en court-circuit
( 0
2V)
0
2
2
22
1
V
V
I
Y: Admittance vue de la sortie en laissant l’entrée du quadripôle en court-circuit ( 0
1V)
Remarque :
La matrice Y est l’inverse de la matrice Z . Le passage de l’une à l’autre implique d’inverser la matrice
[Z]. :
1
ZY
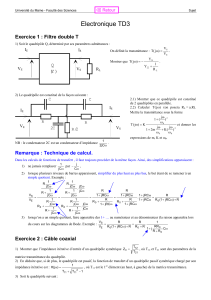
Exemple :
Calculer les éléments de la matrices [Y] du circuit suivant :
2.3. Matrice hybride :
On utilise les deux équations suivantes pour décrire le quadripôle :
2121111 VHIHV
2221212 VHIHI
Sous forme matricielle nous avons :
2
1
2221
1211
2
1
V
I
HH
HH
I
V
Les matrices hybrides sont utilisées en particulier dans l’étude des transistors. Nous avons :
0
1
1
11
2
V
I
V
H: Impédance vue de l’entrée lorsque la sortie du quadripôle en court-circuit ( 0
2V)
0
2
1
12
1
I
V
V
H: Gain en tension inverse lorsque l’entrée du quadripôle est ouverte ( 0
1I)
0
1
2
21
2
V
I
I
H: Gain en courant obtenu avec la sortie du quadripôle en court-circuit ( 0
2V)
0
2
2
22
1
I
V
I
H: Admittance de sortie lorsque l’entrée du quadripôle est ouverte ( 0
1I)
2.4. Matrice de transfert ou matrice chaîne :
Cette matrice est très pratique pour la mise en cascade des quadripôles.

Electronique Analogique Chap.1 : Les quadripôles
2ème STPI Page 4/8
Les relations définissant la matrice de transfert T sont les suivantes :
221 BIAVV
221 DICVI
Sous forme matricielle nous avons :
2
2
1
1
I
V
DC
BA
I
V
Attention : contrairement aux autres représentations matricielles, pour la matrice de transfert T on
utilise le courant 2
I (courant sortant du quadripôle) à la place du courant 2
I (courant entrant dans le
quadripôle). Ce formalisme permet de simplifier les calculs lorsque nous associerons plusieurs
quadripôles en cascade.
A et D sont sans dimension
B est une impédance en (Ώ)et C une admittance en ( 1
)
Les relations étant linéaires, il est aisé de calculer les coefficients d’une représentation à partir de ceux
d’une autre (tableau)
III. Propriétés des quadripôles passifs :
Un quadripôle est dit réciproque, si lorsqu’on place une source de tension à son entrée et qu’on
mesure, le courant de court-circuit à sa sortie, on obtient de même résultat qu’en branchant la
source à sa sortie et en mesurant le courant de court-circuit à l’entrée.
Il vient alors immédiatement, vu la définition des admittances de transfert : 2112 YY
On en déduit facilement, en partant des relations entre les matrices représentatives, les autres
relations : 2112 ZZ ;
1
T
; 2112 HH .
Un quadripôle est dit symétrique si la permutation des deux accès entre eux ne modifie pas le
quadripôle : 2211 ZZ 2211 YY )( 2211 TTDA
1
H
IV. Association des quadripôles :
Suivant l’association de quadripôles, nous choisirons la matrice la plus appropriée.
4.1. Association de série :
On a les relations suivantes :
''
1
'
11 VVV et ''
2
'
22 VVV
'
2
'
22
'
1
'
21
'
2
'
2
'
12
'
1
'
11
'
1
IZIZV
IZIZV et
''
2
''
22
''
1
''
21
''
2
''
2
''
12
''
1
''
11
''
1
IZIZV
IZIZV
Comme ''
1
'
11 III et ''
2
'
22 III nous pouvons écrire les relations
suivantes pour le quadripôle équivalent :
2
"
22
'
221
"
21
'
212221212
2
"
12
'
121
"
11
'
112121111
)()(
)()(
IZZIZZIZIZV
IZZIZZIZIZV
Ainsi sous forme matricielle, la matrice impédance du quadripôle équivalent est égale à la somme des
matrices impédances : [Z]= [Z']+ [Z"]. On ajoute terme à terme les éléments de même indice.
4.2. Association parallèle :
On a les relations suivantes :
''
1
'
11 III et ''
2
'
22 III
'
2
'
22
'
1
'
21
'
2
'
2
'
12
'
1
'
11
'
1
VYVYI
VYVYI et
''
2
''
22
''
1
''
21
''
2
''
2
''
12
''
1
''
11
''
1
VYVYI
VVVYI
Comme ''
1
'
11 VVV et ''
2
'
22 VVV nous pouvons écrire les
relations suivantes pour le quadripôle équivalent :
2
"
22
'
221
"
21
'
212221212
2
"
12
'
121
"
11
'
112121111
)()(
)()(
VYYVYYVYVYI
VYYVYYVYVYI

Electronique Analogique Chap.1 : Les quadripôles
2ème STPI Page 5/8
Ainsi sous forme matricielle, la matrice impédance du quadripôle équivalent est égal à la somme des
matrices impédances : [Y]= [Y']+ [Y"]. On ajoute terme à terme les éléments de même indice.
4.3. Association en cascade :
Nous allons chercher à déterminer la matrice de
transfert du quadripôle résultant de cette association.
Chaque quadripôle est défini par sa matrice de transfert
:
Quadripôle Q’ :
''
''
'DC
BA
T Quadripôle Q’’ :
""
""
"DC
BA
T
Dans cette association, nous avons les relations suivantes entre les courants et entre les différences de
potentiel :
'
11 II '
2
"
1II 2
"
2II et '
11 VV '
2
"
1VV 2
"
2VV
On a donc les relations suivantes pour le premier quadripôle :
"
1
"
1
'
2
'
2
'
11
"
1
"
1
'
2
'
2
'
11
''''
''''
IDVCIDVCII
IBVAIBVAVV
Pour le second quadripôle, nous avons :
22
''
2
''
2
''
1
'
2
22
''
2
''
2
''
1
'
2
"'''''
''''''''
IDVCIDVCII
IBVAIBVAVV
D’où :
)""(')''"('
)""(')''"('
"
2
"
2
''
2
''
21
"
2
"
2
''
2
''
21
IDVCDIBVACI
IDVCBIBVAAV
Ainsi on en déduit les relations entre 1
V, 1
I, 2
V, 2
I
221
221
)"'"'()'''"'(
)"'"'()"'"'(
IDDBCVCDACI
IDBBAVCBAAV
"'"'"'"'
"'"'"'"'
DDBCCDAC
DBBACBAA
T
La matrice T du quadripôle Q obtenu par la mise en cascade de deux quadripôles Q’ et Q’’ est égale au
produit matriciel des matrices T’ et T’’ : [T] = [T'].[T"]
Toutes ces associations de quadripôles se généralisent à un nombre n de quadripôles.
V. Grandeurs caractéristiques des quadripôles :
On considère un quadripôle décrit par sa matrice impédance [Z] :
On les relations suivantes :
2121111 IZIZV (1) 2221212 IZIZV (2)
11 VIZe L (3) 22 IZV C
(4)
Les grandeurs intéressantes sont :
1
2
V
V
AV gain en tension du quadripôle. Ce gain est sans dimension (réel ou complexe). V
A est
toujours inférieur à 1 pour un quadripôle passif.
1
2
I
I
Ai gain en courant
1
1
I
V
ZE impédance d’entrée
2
2
I
V
ZS impédance de sortie.
 6
7
8
6
7
8
1
/
8
100%