’ CHUTE VERTICALE D UN SOLIDE

CHUTE VERTICALE D’UN SOLIDE SYNTHESE
CLASSEUR Terminale S Agence de CHARLEVILLE MEZIERES
P
g
g
g
G
g
g
g
Π = –
Pf
Ce chapitre est consacré à l'étude de la chute verticale
d'un solide abandonné sans vitesse initiale au
voisinage de la Terre. Au cours de son mouvement,
celui-ci est en interaction avec la Terre et le fluide
dans lequel il tombe (air, eau...).
CARACTERISTIQUES DES FORCES
• Le poids
P
Au voisinage de la Terre, le poids d'un objet, aussi
appelé force de pesanteur, est assimilable à la force
d'attraction gravitationnelle que la Terre exerce sur
lui.
Le poids est une force à distance, répartie en volume,
que l'on peut modéliser par le vecteur
P :
– origine : le centre de gravité G (centre d'inertie) de
l'objet ;
– direction : la verticale du lieu ;
– sens : le sens descendant ;
– valeur :
P = mg
P poids en newton (N)
m masse en kilogramme (kg)
g intensité de la pesanteur en m.s–2 ou N.kg–1
L'intensité g de la pesanteur a les dimensions d'une
accélération. Sa valeur, qui dépend de l'altitude, est
environ 9,8 N.kg–1 au voisinage du sol.
La relation P = mg peut aussi s'écrire en vecteurs :
P = m
g, où
g est le vecteur champ de
pesanteur, défini en tout point de l'espace, vertical et
orienté vers le bas, de valeur g.
Localement, on peut considérer que le champ de
pesanteur est uniforme : le vecteur
g garde même
direction, même sens et même valeur.
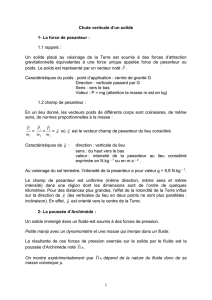
• La poussée d'Archimède
Π
La poussée d'Archimède est la résultante des forces
de pression qu'exercée un fluide sur un objet
immergé dans ce fluide.
La poussée d'Archimède est la force opposée au
poids
Pf du volume de fluide déplacé (volume de
fluide dont le solide prend la place).
La poussée d'Archimède est une force de contact,
répartie en surface, que l'on peut modéliser par le
vecteur
Π = –
Pf de caractéristiques :
– origine : le centre de gravité (centre d'inertie) du
volume de fluide déplacé ;
– direction : la verticale du lieu ;
– sens : le sens ascendant ;
– valeur :
Π = fVg
Π poussée d'Archimède en newton (N)
f masse volumique du fluide (kg.m–3)
V volume de fluide déplacé en m3
g intensité de la pesanteur en m.s–2 ou N.kg–1
Dans le cas d'un solide homogène entièrement
immergé, la poussée d'Archimède
Π est appliquée
au centre d'inertie G du solide, confondu avec le
centre de gravité du volume de fluide déplacé.
Pour comparer le poids d'un solide entièrement
immergé, de masse volumique , et la poussée
d'Archimède exercée par le fluide sur lui, on calcule
le rapport de leurs valeurs :
Π
P = Π
mg = fVg
Vg = f
Dans le cas d'un solide entièrement immergé dans
un fluide de masse volumique très inférieure à la
sienne, la poussée d'Archimède s'exerçant sur le
solide est négligeable devant son poids.
Cette condition est en général réalisée pour des
solides pleins plongés dans l'air.
• Les forces de frottement fluide
De sens contraire au mouvement, les forces de
frottement fluide dépendent de la nature du fluide,
de la vitesse du centre d'inertie du solide immergé, de
sa géométrie et de son état de surface.
Les forces de frottement fluide s'exercent sur toute la
surface du solide.
On représente leur résultante
f au centre d'inertie
G du solide.
– Aux « faibles vitesses », la valeur f des forces de
frottement fluide est proportionnelle à la valeur vG de
la vitesse du centre d'inertie G du solide : f = kvG.
– À des « vitesses élevées », la valeur f des forces de
frottement fluide est proportionnelle au carré de la
valeur vG de la vitesse du centre d'inertie G du
solide : f = K vG2.
L'expression des forces de frottement fluide
f est
donnée dans les énoncés.

CHUTE VERTICALE D’UN SOLIDE SYNTHESE
CLASSEUR Terminale S Agence de CHARLEVILLE MEZIERES
ETUDE DE LA CHUTE AVEC FROTTEMENTS
• Équation différentielle du mouvement
D'après la deuxième loi de Newton, le vecteur
accélération
aG du centre d'inertie G du solide
vérifie à chaque instant dans le référentiel terrestre
considéré galiléen :
P +
Π +
f = m
aG = md
vG
dt
Tous les vecteurs sont verticaux. En exprimant leurs
coordonnées dans un repère constitué d'un axe
vertical z'z, orienté vers le bas, d'origine O prise au
point de départ du solide, il vient, en posant vG = v :
P – Π – f(v) = m dv
dt
On obtient ainsi une équation différentielle du
premier ordre en v. On peut procéder à une résolution
numérique approchée de v(t) par la méthode d'Euler
(voir I Chute 0’’’).
Cette équation est difficile à intégrer parce que f
dépend de v. La résolution, assez simple si f est
proportionnelle à v, est délicate si f est
proportionnelle à v2.
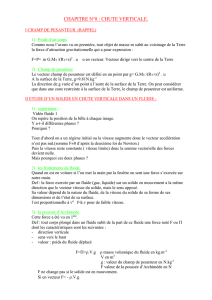
• Allure de la courbe v = f(t)
Le mouvement du centre d'inertie du solide comporte
deux phases :
- le régime initial (ou régime transitoire), au cours
duquel la vitesse v varie de manière importante ;
- le régime asymptotique (ou régime permanent), au
cours duquel la vitesse v varie très faiblement, la
courbe v(t) présentant une asymptote horizontale
dont l'ordonnée est la vitesse limite vlim.
Le temps caractéristique τ permet d'évaluer l'ordre
de grandeur du temps de passage d'un régime à
l'autre.
Graphiquement, le temps caractéristique τ correspond
à l'abscisse du point d'intersection de l'asymptote
horizontale de la courbe et de sa tangente à l'origine.
• Explication qualitative du mouvement
– Au départ, le solide est entraîné par son poids, très
supérieur à la poussée d'Archimède. La vitesse étant
faible, la valeur f des forces de frottement fluide est
négligeable devant la valeur P du poids. Le centre
d'inertie G du solide est animé d'un mouvement
rectiligne accéléré.
- Au fur et à mesure que le solide prend de la vitesse,
la valeur f des forces de frottement fluide augmente,
jusqu'à approcher la valeur P du poids. La résultante
des forces exercées sur le solide devient quasiment
nulle. Le mouvement évolue alors vers un
mouvement rectiligne uniforme, la vitesse tendant
vers une valeur limite vlim.
LA CHUTE LIBRE VERTICALE
Un solide soumis uniquement à son poids est en
chute libre.
Le modèle de la chute libre peut être utilisé dans la
mesure où les valeurs de
Π et de
f sont faibles
devant celle de
P .
Cette condition est approximativement réalisée dans
le cas de solides denses, pour des hauteurs de chute
pas trop grandes (par exemple, chute d'une bille
d'acier sur quelques mètres).
La deuxième loi de Newton s'écrit alors à chaque
instant dans le référentiel terrestre considéré galiléen :
P = m
g = m
aG , soit :
aG =
g .
Dans le référentiel terrestre, le mouvement du centre
d'inertie G de tout solide en chute libre se fait à
accélération constante
g, vecteur champ de
pesanteur du lieu.
Pour cette raison, on appelle aussi le vecteur
g
« accélération de la pesanteur ».
tangente à l'origine
vlim
0
τ
t(s)
v(m.s–1)
z
z’
O
P
f
Π

CHUTE VERTICALE D’UN SOLIDE SYNTHESE
CLASSEUR Terminale S Agence de CHARLEVILLE MEZIERES
Le mouvement de chute libre est uniformément
accéléré. En projetant comme précédemment cette
relation sur l'axe vertical z'z, orienté vers le bas,
d'origine O prise au point de départ du solide, il vient,
en posant vG = v :
aG = dvG
dt = g, soit : dv
dt = g
Dans le référentiel terrestre, la vitesse du centre
d'inertie G d'un solide abandonné en chute libre à la
date t = 0 sans vitesse initiale est : v = gt.
L'intégration de l'équation par rapport au temps
donne : v = gt + cte, avec cte = v(0) = 0.
— exemple de chute avec frottements
—— chute libre
Dans les conditions précédentes, il vient, en notant
zG = z la cote du centre d'inertie G du solide :
vG = dzG
dt = gt , soit dz
dt = gt
Dans le référentiel terrestre, la hauteur de chute z du
centre d'inertie G d'un solide abandonné en chute
libre à la date t = 0 sans vitesse initiale est :
z = 1
2 gt2.
L'intégration de l'équation par rapport au temps
donne : z = 1
2 gt2 + cte, avec cte = z(0) = 0.
METHODE
EXPLOITER L'EQUATION DIFFERENTIELLE
D'UNE CHUTE VERTICALE
Après modélisation de la chute verticale d'un solide
abandonné sans vitesse initiale, on obtient dans le
Système International d'unités l'équation
différentielle du premier ordre en v, vitesse du centre
d'inertie G du solide :
dv
dt + 0,50 v = 9,8
1. Détermination de l'accélération initiale
Le terme dv
dt représente la valeur a de l'accélération du
solide (en m.s–2). On obtient l'accélération initiale a0
en écrivant v = 0 dans l'équation différentielle :
a0 = 9,8 m.s–2.
Au départ, on peut considérer le solide soumis à son
poids seul : son accélération est donc égale à
l'accélération de la pesanteur g.
2. Détermination de la vitesse limite de chute
En régime permanent, on obtient la valeur vlim de la
vitesse limite en écrivant dv
dt = 0 dans l'équation
différentielle :
0,50vlim = 9,8 d’où vlim = 9,8
0,50 = 19,6 m.s–1
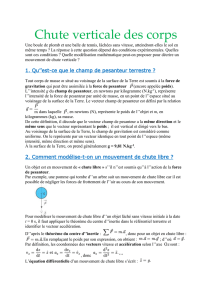
3. Construire la courbe v(t) par la méthode
graphique d'Euler.
• On choisit un intervalle de temps Δt suffisamment
petit, appelé « pas de résolution » (par exemple,
Δt = 0,50 s). La méthode d'Euler consiste à construire
sur des durées Δt successives des segments de droite
approchant la courbe réelle v(t). On utilise pour cela :
– l'équation différentielle du premier ordre en v :
a = dv
dt = – 0,50v + 9,8
– la définition approchée de l'accélération :
a
Δv
Δt , soit Δv = a × Δt
Dans la définition approchée de l'accélération, on
peut passer de l'égalité des vecteurs à l'égalité des
valeurs car le mouvement est rectiligne.
• Le solide étant abandonné sans vitesse initiale, le
premier point est l'origine O du repère de
coordonnées t0 = 0 et v0 = 0.
1
1,5
2
2,5
3
3,5
4
10
15
20
25
30
35
0
0,5
5
t(s)
v(m.s–1)

CHUTE VERTICALE D’UN SOLIDE SYNTHESE
CLASSEUR Terminale S Agence de CHARLEVILLE MEZIERES
• A l'instant t = 0, l'accélération vaut d'après
l'équation différentielle : a0 = 9,8 m.s–2. Pendant la
durée Δt = 0,50 s, la vitesse varie de Δv :
Δv = v1 – v0 = a0 × Δt = 4,9 m.s–1
À l'instant t1 = Δt = 0,50 s, on a donc :
v1 = Δv + v0 = 4,9 m.s–1.
On place alors sur le graphe le point M1 de
coordonnées correspondantes, et on trace le segment
de droite [OM1].
• À l'instant t = t1, l'accélération vaut d'après
l'équation différentielle :
a1 = dv
dt(t1) = – 0,50v1 + 9,8 = 7,4 m.s–2.
Pendant la durée Δt = 0,50 s, la vitesse varie de Δv :
Δv = v2 – v1 = a1 × Δt = 3,7 m.s–1.
À l'instant t2 = t1 + Δt = 1,0 s, on a donc :
v2 = Δv + v1 = 8,6 m.s–1.
On place alors sur le graphe le point M2 de
coordonnées correspondantes, et on trace le segment
de droite [M1M2].
• À l'instant t = t2, l'accélération vaut d'après
l'équation différentielle :
a2 = dv
dt(t2) = – 0,50v2 + 9,8 = 5,5 m.s–2.
Pendant la durée Δt = 0,50 s, la vitesse varie de Δv :
Δv = v3 – v2 = a2 × Δt = 2,75 m.s–1.
À l'instant t3 = t2 + Δt = 1,5 s, on a donc :
v3 = Δv + v2 = 11,3 m.s–1.
On place alors sur le graphe le point M3 de
coordonnées correspondantes, et on trace le segment
de droite [M2M3].
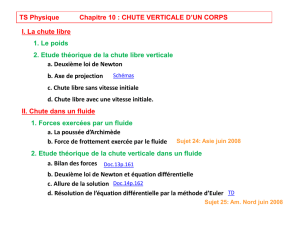
• On réitère l'opération jusqu'à approcher de la
vitesse limite vlim. L'ensemble des segments de droite
donne une représentation graphique approchée de la
fonction v(t).
On obtient une meilleure précision en diminuant le
pas de résolution, mais on allonge aussi les calculs.
Origine
du
segment
v
(m.s–1)
a
(m.s–2)
Δv
(m.s–1)
Extrémité
du
segment
O(0 ; 0)
0
9,8
4,9
M1
(0,5 ; 4,9)
M1
(0,5 ; 4,9)
4,9
7,4
3,7
M2
(1,0 ; 8,6)
M2
(1,0 ; 8,6)
8,6
5,5
2,8
M3
(1,5 ; 11,3)
M3
(1,5 ; 11,3)
11,3
4,1
2,1
M4
(2,0 ; 13,4)
M4
(2,0 ; 13,4)
13,4
3,1
1,5
M5
(2,5 ; 14,9)
M5
(2,5 ; 14,9)
14,9
2,3
1,2
M6
(3,0 ; 16,1)
M6
(3,0 ; 16,1)
16,1
1,7
0,87
M7
(3,5 ; 17,0)
M7
(3,5 ; 17,0)
17,0
1,3
0,65
M8
(4,0 ; 17,6)
M8
(4,0 ; 17,6)
17,6
0,98
0,49
M9
(4,5 ; 18,1)
M9
(4,5 ; 18,1)
18,1
0,74
0,37
M10
(5,0 ; 18,5)
M10
(5,0 ; 18,5)
18,5
0,55
0,28
M11
(5,5 ; 18,8)
M11
(5,5 ; 18,8)
18,8
0,42
0,21
M12
(6,0 ; 19,0)
M12
(6,0 ; 19,0)
19,0
0,31
0,16
M13
(6,5 ; 19,2)
M13
(6,5 ; 19,2)
19,2
0,20
0,10
M14
(7,0 ; 19,3)
M14
(7,0 ; 19,3)
19,3
0,15
0,08
M15
(7,5 ; 19,4)
M15
(7,5 ; 19,4)
19,4
0,10
0,05
M16
(8,0 ; 19,5)
M
1
M
2
M
3
M
4
M
5
M
6
19,6
Vlim
0
0,5
5
t(s)
v(m.s-1)
M
1
M
2
M
3
M
4
M
5
M
6
1
/
4
100%