CH1 - Oscillateurs

Signaux physiques - Chapitre 1
MPSI 2015-2016
Lycée Lapérouse - Kerichen
1 / 20
Quelques compétences fondamentales
appliquées à l’étude de l’oscillateur harmonique
Introduction sur la notion de modèle en physique ..................................................................................... 3
I Modélisation de la force de rappel d’un ressort .........................................................................................4
1 Les grandeurs dont dépend la force de rappel d’un ressort ...................................................................4
2 La norme de la force de rappel d’un ressort ...........................................................................................4
3 L’expression vectorielle de la force de rappel d’un ressort ....................................................................4
II Loi de la quantité de mouvement ou Principe Fondamental de la Dynamique .........................................5
1 Enoncé de la loi de la quantité de mouvement (ou PFD ou 2e loi de Newton) .......................................5
2 Les composantes des vecteurs vitesse et accélération ...........................................................................5
3 Application du PFD au cas de la chute libre ............................................................................................5
III Comment vérifier la validité d’une relation littérale? .................................................................................6
1 Les 7 unités fondamentales .....................................................................................................................6
2 Les dimensions.........................................................................................................................................6
3 Équation aux dimensions .........................................................................................................................7
4 Homogénéité d’une relation littérale ......................................................................................................7
5 Analyse qualitative d’une relation littérale ............................................................................................8
IV L’oscillateur harmonique : équation différentielle du mouvement ............................................................8
1 Application du PFD ..................................................................................................................................8
2 Forme canonique de l’équation différentielle du mouvement ...............................................................8
V Détermination du mouvement par résolution de l’équation différentielle ................................................9
1 Résolution dans deux cas simples ...........................................................................................................9
2 Résolution dans le cas de conditions initiales quelconques ....................................................................9
3 Différentes formulation de la solution générale .....................................................................................9
4 Application ...............................................................................................................................................9
VI Application numérique et écriture du résultat ............................................................................................9
1 Cohérence entre les unités ......................................................................................................................9
2 Les préfixes multiplicateurs .................................................................................................................. 10
3 Les conversions ..................................................................................................................................... 10
4 Le calcul sans calculatrice ..................................................................................................................... 10
5 Notion d’incertitude et écriture d’un résultat ...................................................................................... 11
6 Les différents types d’incertitude ......................................................................................................... 11

Signaux physiques - Chapitre 1
MPSI 2015-2016
Lycée Lapérouse - Kerichen
2 / 20
VII Énergie mécanique d’un oscillateur harmonique ................................................................................ 14
1 Énergie potentielle ............................................................................................................................... 14
2 Énergie mécanique ............................................................................................................................... 14
3 Conséquences de la conservation de l’énergie mécanique ................................................................. 14
VIII TP – Mesures des caractéristiques d’un signal oscillant sinusoïdal ..................................................... 15
1 Acquisition avec Latispro ...................................................................................................................... 15
2 Déphasage entre deux signaux ............................................................................................................. 15
3 Mesures des caractéristiques des signaux obtenus expérimentalement ............................................ 17
4 Somme de deux signaux sinusoïdaux ................................................................................................... 17
5 Déphasage entre un signal et sa dérivée .............................................................................................. 17
IX Exercices ................................................................................................................................................... 18
1 Questions d’application du cours ......................................................................................................... 18
2 Le pendule simple ................................................................................................................................. 18
3 Démonstrations de cours ..................................................................................................................... 19
4 Calcul sans calculatrice ......................................................................................................................... 19
5 Oscillations verticales ........................................................................................................................... 20
6 Masse entre deux ressorts horizontaux ............................................................................................... 20
Les compétences à acquérir
- représenter la situation proposée par un schéma clair et explicite
- comprendre la notion de modèle en physique
- établir une relation littérale (à partir de la seconde loi de Newton)
- vérifier la validité d’une relation littérale
- effectuer une application numérique
- présenter un résultat numérique en tenant compte des incertitudes du problème
- avoir un esprit critique sur le modèle utilisé

Signaux physiques - Chapitre 1
MPSI 2015-2016
Lycée Lapérouse - Kerichen
3 / 20
Introduction sur la notion de modèle en physique
Les mathématiques sont une science permettant de résoudre des problèmes dans différents
domaines. L’algèbre est par exemple une des branches des mathématiques qui permet, entre autre, de
systématiser les méthodes de résolution des problèmes mathématiques. Algèbre est issu de l’arabe
« al jabr » qui signifie réduction (à l’origine, réduction d’une fracture) ; l’algèbre permet en effet de
réduire un problème à des équations et de résoudre ces équations.
Un exemple très simple de mise en équation d’un problème : « j’ai des pièces de 1€ et des pièces de
2€. Au total j’ai 30 pièces et 50€. Combien ai-je de pièces de 1€ et de pièces de 2€ ? ». Le résultat est
assez rapide à obtenir après une simple mise en équation ; résoudre ce problème revient à résoudre
un système de deux équations à deux inconnues (x + 2y = 50 et x + y = 30 ; on trouve alors x = 10
pièces de 1 € et y = 20 pièces de 2 €).
Une des grandes forces des mathématiques est de pouvoir réduire des phénomènes à priori sans
aucun rapport entre eux à un même type d’équation. Nous allons par exemple voir dans ce chapitre
que l’allongement x(t) d’un ressort est solution de l’équation différentielle
0)t(x
2
0
)t(x
.
(Remarque : on parle d’équation différentielle car il s’agit d’une équation faisant intervenir une fonction
x(t) et une de ses dérivées ; la solution de cette équation n’est pas une valeur (par exemple x = 3 dans
le cas de l’équation 2x - 6 = 0), mais une fonction x(t) du temps : par exemple x(t) = cos(100πt)). Et
cette équation différentielle est caractéristique de phénomènes aussi divers que le mouvement d‘un
ressort, les oscillations d’un pendule, l’évolution du courant dans un circuit comportant un
condensateur et une bobine, etc. C’est l’équation très générale d’un oscillateur harmonique.
Il est tout de même important de noter que les mathématiques, qui permettent notamment de résoudre
ce type d’équations différentielles (voir paragraphes V), se distinguent des autres sciences par leur
rapport particulier au réel. Elles sont de nature entièrement intellectuelle puisque basées sur des
axiomes (supposés vrais) desquels découlent par des raisonnements logiques, des théorèmes, des
propriétés, des applications, etc.
Mais comment se fait-il alors que les mathématiques permettent d’expliquer des phénomènes existant
dans la nature, qui ne reposent pas sur des axiomes, des hypothèses, mais qui sont au contraire
parfaitement réels ? Galilée (1564 - 1642) répondait à cette question en affirmant que les
mathématiques sont en fait le langage dans lequel est écrit le monde réel. Voilà pourquoi un
phénomène naturel peut être décrit par une équation mathématique, susceptible d’être ensuite résolue
et permettant ainsi d’expliquer le phénomène, d’en prévoir un autre, etc.
Mais la question reste tout de même posée : comment traduire un phénomène réel en une équation
mathématique ? La réponse à cette question va reposer sur la notion de modèle. Afin d’interpréter
quantitativement une expérience, il va falloir modéliser le phénomène réel par une relation
mathématique entre les grandeurs physiques caractérisant ce phénomène. Il faudra donc d’abord
déterminer les grandeurs pertinentes du problème puis voir l’influence de chacune d’elles sur celui-ci.
C’est ce que nous allons faire au paragraphe I afin de déterminer l’expression de la force de rappel
d’un ressort. Une fois cette expression déterminée, il faudra ensuite réinjecter cette expression dans
la 2e loi de Newton (voir paragraphes II et IV) puis résoudre l’équation obtenue (voir V).
Cela ne sera cependant pas tout à fait terminé : il restera encore à valider (ou réfuter) le modèle en
confrontant les mesures expérimentales à la solution x(t) de l’équation différentielle (voir TP).
Un modèle a donc pour utilité de décrire, d'interpréter et de prévoir des événements et il ne s'applique
qu'à un nombre limité de phénomènes. Il a comme rôle de décrire une réalité complexe de manière
simple et compréhensible. Par exemple, il est souvent plus facile d'utiliser le modèle atomique simplifié
pour expliquer certains phénomènes (couleur bleue du ciel…) que d'utiliser la vraie théorie adaptée au
problème, la théorie de la mécanique quantique, qui est très complexe d'un point de vue mathématique
et conceptuel. En conclusion, un bon modèle comporte plusieurs qualités essentielles :
- il permet d'expliquer relativement simplement certaines propriétés ou certains comportements
de la réalité qu'il représente ;
- il permet de prévoir, dans une certaine mesure, des événements nouveaux qui pourront
ensuite être observés ;
- il peut être amélioré à la lumière de nouvelles observations.

Signaux physiques - Chapitre 1
MPSI 2015-2016
Lycée Lapérouse - Kerichen
4 / 20
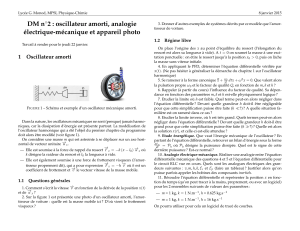
I Modélisation de la force de rappel d’un ressort
Soit un système solide-ressort constitué d’un solide de masse m, fixé à l’extrémité d’un seul ressort à
spires non jointives, de masse négligeable et de constante de raideur k.
La position du centre d’inertie G du solide est étudiée dans un référentiel terrestre considéré comme
galiléen et repérée par son abscisse x(t) sur un axe horizontal x’Ox. L’abscisse x0 correspond à la
position G0 de G lorsque le ressort n’est ni étiré, ni comprimé.
1 Les grandeurs dont dépend la force de rappel d’un ressort
De quelles grandeurs la force de rappel d’un ressort doit-elle dépendre ?
-
-
2 La norme de la force de rappel d’un ressort
Dans le cas d’un système solide ressort oscillant au voisinage de sa position d’équilibre (ressort peu
étiré et peu comprimé), on peut supposer que les déformations du ressort sont réversibles et que l’on
reste dans le domaine linéaire. Dans ce cas, on peut supposer que…
3 L’expression vectorielle de la force de rappel d’un ressort
Rq 1 : cette relation reste vraie, que le ressort soit horizontal ou vertical.
Rq 2 : si l’origine O de l’axe avait été choisi en G0 (et uniquement dans ce cas !), la relation aurait été :
(k)
G (m)
O
x(t)
i
E
x
x'
Ressort en compression Ressort en élongation
x0
O
O
O
G0
G0
G
G

Signaux physiques - Chapitre 1
MPSI 2015-2016
Lycée Lapérouse - Kerichen
5 / 20
II Loi de la quantité de mouvement ou Principe Fondamental de la Dynamique
1 Enoncé de la loi de la quantité de mouvement (ou PFD ou 2e loi de Newton)
Dans le cas d’un système de masse constante,
2 Les composantes des vecteurs vitesse et accélération
3 Application du PFD au cas de la chute libre
x
u
z
u
y
u
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%