Chp.6 Premiers outils du Calcul Différentiel

Premiers outils du Calcul Différentiel
Prologue
Ce chapître introduit les premiers outils du Calcul Différentiel : cône tangent
à une partie d’un espace de dimension finie ,dérivées de Dini ,dérivées direction-
nelles ,Gateaux- dérivabilité(1), et présente trois applications importantes :
1. La règle de Fermat(2) qui permet de déterminer les éventuels « extrema
locaux », ou « extrema libres », de fonctions f∶D⊂Rn↦Rde plusieurs
variables réelles, à valeurs réelles, mais aussi, plus généralement, de fonc-
tions f∶D⊂E↦Rà valeurs réelles, définies sur un espace de dimension
finie quelconque, paradigme(3) fondamental de l’optimisation.
2. Le théorème des accroissements finis qui permet un calcul explicite des
constantes de Lipschitz de fonctions à valeurs réelles, localement Lip-
schitziennes, définies sur un ouvert d’un espace de dimension finie. On
prouve en particulier que toute fonction à valeurs réelles de nvariables
réelles, définie sur un ouvert Ode Rn, qui admet en tout point de Odes
dérivées partielles majorées, en valeur absolue, par une même constante
réelle, est Lipschitzienne.
3. La caractérisation de la projection Euclidienne sur une partie convexe
fermée d’un espace Euclidien (E,<,>)d’un point donné dans E, arché-
type du problème consistant à minimiser une fonction à valeurs réelles
définie sur une partie convexe fermée d’un espace de dimension finie,
autre paradigme classique de l’optimisation. On énonce une condition
nécessaire d’optimalité, vérifiée par les solutions d’un tel problème, qui
généralise la règle de Fermat.
1. - René Eugène Gateaux, 1889-1914, Mathématicien Français. Pour découvrir sa biographie :
http://www-groups.dcs.st-andrews.ac.uk/history/Mathematicians/Gateaux.html.
2. - Pierre de Fermat, 1601-1665, Mathématicien Français, « inventeur » du calcul infinitésimal, au-
teur du recueil : « Methodus ad disquirendam maximam et minimam ». Pour découvrir sa bio-
graphie :http://www-groups.dcs.st-andrews.ac.uk/history/Biographies/Fermat.html
.
3. « Paradigme » : choix de problèmes à étudier et des techniques propres à leur étude :
www.larousse.fr/dictionnaires/français/paradigme/ .

6.1. CÔNE DES VACTEURS TANGENTS 135
La notion centrale du chapître est la notion de Gateaux-dérivabilité d’une
fonction à valeurs réelles f∶D⊂E↦Rdéfinie sur une partie Dd’un espace de
dimension finie E, en un point de l’intérieur de D. Pourquoi « Gateaux-dériva-
bilité » et pas simplement dérivabilité ? Parce ce que dès que Eest de dimension
au moins égale à deux, il convient de distinguer plusieurs notions de dérivabi-
lité. La Gateaux-dérivabilité, ou dérivabilité « au sens de Gateaux » est la plus
simple d’entre-elles. Si la plupart des fonctions rencontrées dans la pratique de
la modélisation mathématique sont partout - ou presque partout - dérivables en
un sens plus fort : « Fréchet-dérivables(4) », ou même « continument dérivables »,
leur « dérivée » est toujours leur dérivée « au sens de Gateaux », et c’est sur la dé-
finition de la Gateaux-dérivée que repose le principe du calcul formel de déri-
vées. Un exemple typique est la calcul de la dérivée d’une fonction quadratique
(Exercice 6.6). On donne dans ce chapître une interprétation géométrique de
la notion de Gateaux-dérivée, qui sera développée et complétée ultérieurement
dans l’étude de la dérivée « au sens de Fréchet ».
6.1 Cône des vecteurs tangents en un point à une partie
d’un espace de dimension finie
Soient Eun espace de dimension finie quelconque, et Sune partie quel-
conque de E.
Définition 6.1.1 On dit qu’un vecteur v de E est « tangent » à S en point a adhé-
rent à S si, pour tout réel : t >0, et tout voisinage V de v dans E :
(a+]0, t[V)∩S≠∅(6.1)
De manière équivalente, v est tangent à S au point a s’il existe une suite t(k)de
réels strictement positifs et une v(k)de vecteurs de E telles que :
t(k)↓0, v(k)E
→v,et : a +t(k)v(k)∈S(6.2)
On note TS(a)l’ensemble des vecteurs tangents à Sau point a.
Proposition 6.1.1 Pour tout a dans ○
S : TS(a)=E .
4. - Maurice René Fréchet, 1878-1973, Mathématicien Français. Pour découvrir sa biographie :
http://www-groups.dcs.st-andrews.ac.uk/history/Biographies/Frechet.html.

136 CHAPITRE 6. PREMIERS OUTILS DU CALCUL DIFFÉRENTIEL
Proposition 6.1.2 Pour tout a dans ∂S, TS(a)est un cône fermé de sommet 0E:
v∈TS(a),λ≥0⇒λv∈TS(a) (en particulier : 0E∈TS(a))
v(k)∈TS(a),v(k)E
→v⇒v∈TS(a)(6.3)
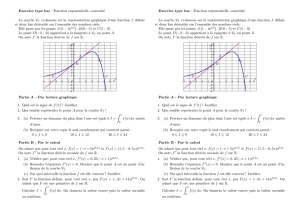
La figure 6.1 représente aléatoirement plusieurs vecteurs tangents dans R2
en un point du bord d’un carré ou d’un disque, suggèrant l’allure du cône des
vecteurs tangents en ce point.
Fig. 6.1 – Exemples de vecteurs tangents dans R2en différents points
du bord d’un carré ou d’un disque
Cône tangent à un convexe
Proposition 6.1.3 Si S est convexe, TS(a)est l’adhérence du cône de sommet 0E
« engendré » par S −a :
TS(a)=
t≥0
t(S−a)(6.4)
Preuve : - Si Sest convexe, il contient : a+t(x−a)=t x +(1−t)apour tout
xdans Set tout réel tdans [0, 1], donc TS(a)contient x−apour tout xdans
S. Ainsi TS(a)contient le cône t≥0t(S−a)engendré par S−a. Comme il est
fermé, il contient également son adhérence : t≥0t(S−a)⊂TS(a).
- Réciproquemment, pour tout vdans TS(a), il existe une suite de réels stric-
tement positifs t(k), convergeant vers zéro, et une suite de vecteurs v(k)dans
E, convergeant vers v, telles que : a+t(k)v(k)∈S, de sorte que :
v(k)∈t(k)−1(S−a)⊂
t≥0
t(S−a)⇒v∈
t≥0
t(S−a)
donc : TS(a)⊂
t≥0
t(S−a).

6.2. FONCTIONS RÉELLES D’UNE VARIABLE RÉELLE 137
6.2 Fonctions réelles d’une variable réelle
Dérivées de Dini
Soit ϕ∶I⊂R↦Rune fonction réelle d’une variable réelle définie sur une
partie quelconque Ide R.
- Supposons que Icontienne un intervalle de la forme [t,t+s[(s>0) :
Définition 6.2.1 On appelle « dérivées de Dini(5) » de ϕau point t, respective-
ment « inférieure droite » et « supérieure droite » les deux éléments de R:
D+ϕ(t)=liminf
s↓0
s−1[ϕ(t+s)−ϕ(t)]
et : D+ϕ(t)=limsup
s↓0
s−1[ϕ(t+s)−ϕ(t)] (6.5)
Lorsque : D+ϕ(t)=D+ϕ(t), on dit que ϕa une «demi-dérivée à droite » au point
t, et on note :
ϕ′
d(t)=D+ϕ(t)=D+ϕ(t)=lim
s↓0s−1[ϕ(t+s)−ϕ(t)] (6.6)
- Lorsque Icontient un intervalle de la forme ]t+s,t](s<0), on définit de
manière analogue les dérivées de Dini « à gauche » de ϕau point t:
Définition 6.2.2 On appelle « dérivées de Dini inférieure gauche » (resp. « supé-
rieure gauche ») de ϕau point t l’éléments de R:
D−ϕ(t)=liminf
s↑0
s−1[ϕ(t+s)−ϕ(t)]
et : D−ϕ(t)=limsup
s↑0
s−1[ϕ(t+s)−ϕ(t)]) (6.7)
Lorsque : D−ϕ(t)=D−ϕ(t), on dit que ϕa une « demi-dérivée à gauche » au
point t, et on note :
ϕ′
g(t)=D−ϕ(t)=D−ϕ(t)=lim
s↑0s−1[ϕ(t+s)−ϕ(t)] (6.8)
Rappelons enfin que ϕ∶I⊂R↦Rest dérivable au point tsi Iest voisinage
de t, et si le taux d’accroissement t−1[f(t+s)−f(t)]à une limite finie lorsque
stend vers zéro. Cette limite est alors appelée dérivée de ϕau point t, et notée
5. - Ulisse Dini, 1845-1918, mathématicien Italien. Pour découvrir sa biographie :
http://www-groups.dcs.st-andrews.ac.uk/history/Mathematicians/Dini.html

138 CHAPITRE 6. PREMIERS OUTILS DU CALCUL DIFFÉRENTIEL
ϕ′(t). On peut donc énoncer :
Proposition 6.2.1 ϕ∶I⊂R↦Rest « dérivable » au point t si I est voisinage de t ,
et si ϕadmet des demi-dérivées à gauche et à droite égales en ce point, et finies. La
dérivée ϕ′(t)de ϕau point t est alors la valeur commune de ϕ′
g(t)et de ϕ′
d(t):
ϕ′(t)=ϕ′
g(t)=ϕ′
d(t)=lim
s→0s−1[ϕ(t+s)−ϕ(t)]
Dérivabilité
Il est habituel de représenter le graphe d’une fonction ϕ∶I⊂R↦Ren as-
similant la direction de l’axe des ordonnées à la verticale, et de considérer que
ϕest dérivable en un point tlorsque son graphe : G(ϕ)={(t,ϕ(t))t∈I}ad-
met au point (t,f(t))une tangente non verticale . Transcrite dans un langage
rigoureux au moyen de la définition 6.1.1, cette règle empirique devient le :
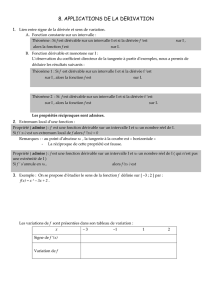
Théorème 6.2.1 ϕ∶I⊂R↦Rest dérivable en point t de l’intérieur de I si et
seulement si :
1. Elle est continue en t .
2. Le cône TG(ϕ)(t,ϕ(t)) des vecteurs tangents au graphe de ϕau point
(t,ϕ(t)) est une droite vectorielle dirigée par un vecteur non colinéaire
au vecteur (0,1)(6).
Dans ce cas : TG(ϕ)(t,ϕ(t))=V ect {(1,ϕ′(t)}.
(a) (b) : (c)
Fig. 6.2 – Vecteurs tangents en un point au graphe d’une fonction ϕ∶I⊂R↦R
Preuve : - Supposons ϕ∶I⊂R↦Rdérivable en un point tde l’intérieur de I,
donc a fortiori continue en t. Dire qu’un couple (r,s)appartient au cône tan-
gent au graphe G(ϕ)de ϕau point (t,ϕ(t)), c’est dire qu’il existe trois suites
réelles : r(k),s(k)et : t(k)telles que :
t(k)↓0, r(k)→r,s(k)→s, et : ϕ(t+t(k)r(k))=ϕ(t)+t(k)s(k)
6. C’est à dire une droite vectorielle « non verticale ».
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
1
/
34
100%