Mathématiques du signal déterministe

Conservatoire National
des Arts et Métiers
MAA107
Mathématiques du signal déterministe
Nelly POINT
11 octobre 2011

0

Table des matières
1 Intégration 3
1.1 Méthodes d’intégration : rappels . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 Utilisation de la linéarité . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.2 Changement de variables . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.3 Intégration par parties . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Généralisation de la notion d’intégrale . . . . . . . . . . . . . . . . . . . . 4
1.2.1 Introduction............................... 4
1.2.2 Intégrale généralisée : cas d’un domaine non borné . . . . . . . . . . 5
1.2.3 Intégrale généralisée : cas d’une fonction non bornée . . . . . . . . . 6
1.3 Intégrales double ou triple . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Les espaces L1(I)et L2(I)11
2.1 Espace L1(I)des fonctions sommables sur I................. 11
2.2 Espace L2(I)des fonctions
de carré sommable sur I............................ 13
2.3 Relation entre L1(I)et L2(I)......................... 14
2.4 Compléments .................................. 15
2.5 Rappels sur les espaces vectoriels . . . . . . . . . . . . . . . . . . . . . . . 16
3 Les séries de Fourier 19
3.1 Introductionetrappels............................. 19
3.2 Série de Fourier trigonométrique . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 Série de Fourier complexe . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4 Convergence des sommes partielles de la série de Fourier dans L2(0, T ). . 23
3.5 Convergence ponctuelle des sommes
partielles de la série de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.6 Dérivation terme à terme . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.7 Vérification des résultats, erreurs usuelles . . . . . . . . . . . . . . . . . . . 24
3.8 Remarquesgénérales .............................. 25
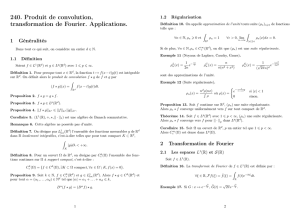
4 Le produit de convolution 27
4.1 Définitions.................................... 27
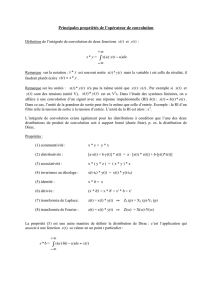
4.2 Propriétés du produit de convolution . . . . . . . . . . . . . . . . . . . . . 28
1

2
4.3 Le produit de convolution régularise . . . . . . . . . . . . . . . . . . . . . . 29
4.4 Utilité du produit de convolution . . . . . . . . . . . . . . . . . . . . . . . 31
4.5 Intercorrélation, autocorrélation . . . . . . . . . . . . . . . . . . . . . . . . 32
4.5.1 Casd’unsignalréel........................... 33
5 La transformation de Laplace 35
5.1 Définition de la transformation de Laplace . . . . . . . . . . . . . . . . . . 35
5.2 Propriétésgénérales............................... 37
5.3 Utilisation de la transformation de Laplace . . . . . . . . . . . . . . . . . . 39
6 La transformée de Fourier 41
6.1 Introduction................................... 41
6.2 Transformée de Fourier dans L1(IR)...................... 41
6.3 Propriétés de la transformée de Fourier . . . . . . . . . . . . . . . . . . . . 43
6.4 Transformée de Fourier dans L2(IR)...................... 46
6.5 Transformée de Fourier des fonctions usuelles . . . . . . . . . . . . . . . . . 48
6.6 Autocorrélation temporelle et Fourier . . . . . . . . . . . . . . . . . . . . . 48
7 Fonctions définies par une intégrale 51
7.1 Motivations ................................... 51
7.2 Propriétés .................................... 51

Chapitre 1
Intégration
Ce chapitre contient un rappel des méthodes d’intégration, une présentation des intégrales
généralisées, et les propriétés élémentaires des intégrales doubles.
1.1 Méthodes d’intégration : rappels
1.1.1 Utilisation de la linéarité
1. transformation de produits en sommes
(par exemple à l’aide de formules de trigonométrie)
2. décomposition des fractions rationnelles en sommes de fonctions simples
1.1.2 Changement de variables
Si on pose x=ϕ(t)où ϕest une fonction définie sur [α, β], telle que ϕ(α) = aet ϕ(β) = b
et dérivable et bijective de [α, β]sur [a, b]alors on a
Zb
a
f(x)dx =Zβ
α
f(ϕ(t)) ϕ0(t)dt avec α=ϕ−1(a)et β=ϕ−1(b)(1.1)
1.1.3 Intégration par parties
Formule qui découle de la formule bien connue de dérivation d’un produit :
(uv)0=u0v+u v0
Elle peut s’écrire :
Zb
a
u(x)v0(x)dx = [u(x)v(x) ]b
a−Zb
a
u0(x)v(x)dx
3
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
1
/
55
100%