Fonctions de deux variables

Chapitre 27
Fonctions de deux variables
Objectifs
– Rappeler la notion de norme, définir les parties bornées et les parties ouvertes de R2.
– Notion de limite et de continuité pour les fonctions de deux variables.
– Notions de dérivées partielles, de fonctions de classe C1.
– Notion d’intégration, passage en coordonnées polaires, formule de Green-Riemann.
Sommaire
I) Fonctions continues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1) Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2) Limite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3) Continuité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
4) Extension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
II) Calcul différentiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1) Dérivées partielles premières . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2) Dérivée suivant un vecteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3) Fonctions de classe C1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
4) Dérivées partielles d’ordre 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
III) Calcul intégral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1) Intégration sur un pavé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2) Intégration sur un fermé borné . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3) Passage en coordonnées polaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4) Formule de Green-Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
IV) Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
I) Fonctions continues
1) Définitions
On rappelle que
R2
est un
R
-espace vectoriel
1
muni du produit scalaire canonique : si
u
= (
x,y
)
et
v
= (
x0,y0
)alors (
u|v
) =
x x0
+
y y0
, et de la norme euclidienne :
kuk
=
px2+y2
, celle-ci ayant les
propriétés suivantes :
–∀u= (x,y)∈R2,kuk¾0.
–∀u∈R2,kuk=0⇐⇒ u=0.
–∀u∈R2,λ∈R,kλuk=|λ|.kuk.
–∀u,v∈R2,ku+vk¶kuk+kvk(inégalité triangulaire).
On définit alors les notions suivantes :
–
Distance euclidienne : la distance de
u∈R2
à
v∈R2
est la norme de la différence :
d
(
u,v
) =
ku−vk
.
1. C’est aussi un espace affine
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 1

Fonctions continues Chapitre 27 : Fonctions de deux variables
–Partie bornée : une partie Ade R2est dite bornée lorsqu’il existe un réel Mtel que :
∀x∈A,kxk¶M.
–
Boule ouverte : soit
u∈R2
et
r>
0, la boule ouverte de centre
u
et de rayon
r
est l’ensemble
B(u,r) = {v∈R2/ku−vk<r}. De même on peut définir les boules fermées et les sphères.
Remarque: Si u= (x,y)alors le pavé ouvert : ]x−r
p2;x+r
p2[×]y−r
p2;y+r
p2[est inclus dans B(u,r).
–
Partie ouverte : une partie
A
de
R2
est dite
ouverte
lorsque
A
est une réunion (quelconque) de boules
ouvertes, ou encore :
∀u∈A,∃r>
0
,B
(
u,r
)
⊂A
. Par convention, l’ensemble vide est considéré
comme une partie ouverte.
Exemples:
–R2est une partie ouverte de R2.
– Une boule ouverte est une partie ouverte de R2.
–
Un demi-plan ouvert (i.e. bord exclu) est une partie ouverte.
–
Une réunion quelconque de parties ouvertes est une partie
ouverte.
–
Une intersection finie de parties ouvertes est une partie
ouverte.
– Une boule fermée n’est pas une partie ouverte de R2.
A
ur
DÉFINITION 27.1 (applications partielles)
Soit
A
une partie de
R2
, soit
f
:
A→R
une fonction, et soit
a
= (
x0,y0
)
∈A
. La première application
partielle de
f
en
a
est la fonction
f1,a
:
t7→ f
(
t,y0
)(on fixe la deuxième variable à
y0
), et la
deuxième application partielle de
f
en
a
est la fonction
f2,a
:
t7→ f
(
x0,t
)(on fixe la première
variable à x0).
Exemple
: Soit
f
(
x,y
) =
x2+y
x2+y2+1
, la première application partielle de
f
en
a
= (0
,
0)est
f1,a
(
t
) =
t2
1+t2
, et la deuxième
application partielle de fen aest f2,a(t) = t
1+t2.
Remarque: Les applications partielles permettent de se ramener aux fonctions d’une variable réelle.
2) Limite
DÉFINITION 27.2 (point adhérent)
Soit
A
une partie non vide de
R2
et
a∈R2
, on dit que
a
est adhérent à
A
lorsque
toute boule
ouverte de centre arencontre A:∀r>0, B(a,r)∩A6=;.
DÉFINITION 27.3
Soit
f
:
A→R
une fonction, et soit
a∈R2
un point adhérent à
A
, soit
`∈R
, on dit que
f
admet
pour limite `en alorsque : ∀" > 0,∃α > 0,∀u∈A,ku−ak< α =⇒ |f(u)−`)|< ".
Notation : lim
af=`
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 2

Fonctions continues Chapitre 27 : Fonctions de deux variables
Remarques:
– Pour que A∩B(a,α)ne soit jamais vide, il est nécessaire que asoit adhérent à A.
– On peut remplacer les inégalités strictes par des inégalités larges, cela ne change pas le sens de la définition.
– lim
af=`⇐⇒ lim
a|f−`|=0.
Exemple
: Les fonctions coordonnées, soit
c1
:
R2→R
définie par
c1
(
x,y
) =
x
et
c2
:
R2→R
définie par
c2
(
x,y
) =
y
.
Soit a= (x0,y0)∈R2, on a : lim
ac1=x0=c1(a)et lim
ac2=y0=c2(a).
Propriétés : on retrouve les propriétés usuelles, à savoir :
– Si la limite existe alors elle est unique.
– Si fa une limite finie en a, alors fest bornée au voisinage de a.
– Si lim
af=`et lim
ag=`0, alors :
– lim
a(f+g) = `+`0.
– lim
af×g=`×`0.
–∀λ∈R,lim
aλf=λ`.
– Si `06=0, alors lim
a
f
g=`
`0.
–
Soit
f
:
A→R
avec
lim
af
=
b
, et
g
:
J→R
avec
Im
(
f
)
⊂J
et
lim
bg
=
`
, alors
lim
ag◦f
=
`
(composition des limites).
La limite (lorsqu’elle existe) ne dépend pas du « chemin » suivi.
Exemples:
–
La fonction
f
(
x,y
) =
x2+y2
x2−y2
est définie continue sur
{
(
x,y
)
∈R2/|x| 6
=
|y|}
. Si on fait tendre (
x,y
)vers (0
,
0)
suivant la direction
u
= (1
,a
)[i.e.
y
=
ax
]avec
|a| 6
=1, alors on trouve
f
(
x,y
) =
1+a2
1−a2−→
(x,y)→(0,0)
1+a2
1−a2
, on en
déduit que fn’a pas de limite en (0,0).
– La fonction f(x,y) = x2y
x2+y2a pour limite 0 en (0,0), car |f(x,y)|¶|y|.
3) Continuité
Soit
A⊂R2
, l’ensemble des fonctions de
A
vers
R
est noté
F
(
A,R
), il est facile de voir que pour les
opérations usuelles sur les fonctions, c’est une R-algèbre.
DÉFINITION 27.4 (continuité)
Soit
f
:
A→R
et soit
a∈A
, on dit que
f
est continue en
a
lorsque
lim
af
=
f
(
a
). Si
f
est continue
en tout point de
A
, on dit que
f
est continue sur
A
, l’ensemble des fonctions continues sur
A
est noté
C0(A,R).
Propriétés : théorèmes généraux
–C0(A,R)est une R-algèbre.
– Si f, g:A→Rsont continues sur Aet si gne s’annule pas, alors f
gest continue sur A.
–
Si
f
:
A→R
est continue sur
A
, et si
g
:
J→R
est continue sur
J
avec
Im
(
f
)
⊂J
, alors
g◦f
est
continue sur A.
Il en découle en particulier que toute fonction polynomiale ou rationnelle en
x
et
y
, est continue sur
son ensemble de définition.
THÉORÈME 27.1
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Soit f:R2→Rune fonction continue, et soit λ∈R, alors l’ensemble :
O=¦(x,y)∈R2/f(x,y)> λ©
est un ouvert.
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 3

Calcul différentiel Chapitre 27 : Fonctions de deux variables
Preuve
: Soit
a∈ O
,
f
est continue en
a
et
f
(
a
)
> λ
, en prenant
"
=
f
(
a
)
−λ >
0, il existe
r>
0 tel que
u∈B(a,r) =⇒ |f(u)−f(a)|< ", ce qui entraîne f(u)> λ, donc B(a,r)⊂ O, ce qui prouve que Oest un ouvert.
THÉORÈME 27.2
Ð
Ð
Ð
Si
f
est continue en
a
= (
x0,y0
)
∈A
, alors la première application partielle de
f
en
a
est continue
en x0, et la deuxième est continue en y0. Mais la réciproque est fausse.
Preuve
: Soit
" >
0, il existe
r>
0 tel que
∀u∈A,ku−ak<r
=
⇒ |f
(
u
)
−f
(
a
)
|< "
. Soit
t∈R
, si
|t−x0|<r
, alors
k
(
t,y0
)
−ak
=
|t−x0|<r
, donc
|f
(
t,y0
)
−f
(
a
)
|< "
, c’est à dire
|f1,a
(
t
)
−f1,a
(
x0
)
|< "
, ce qui prouve que
f1,a
est
continue en x0. Le raisonnement est similaire pour f2,a.
Donnons un contre-exemple pour la réciproque :
f
(
x,y
) =
¨x y
x2+y2si (x,y)6= (0,0)
0 si (x,y) = (0,0)
, en considérant les
directions
u
= (1
,
1)et
v
= (1
,−
1), on voit que la fonction
f
n’a pas de limite en (0
,
0), donc
f
n’est pas continue en
(0,0), par contre les deux applications partielles de fen (0, 0)sont continues en 0 car elles sont nulles.
4) Extension
Soit
A
un partie de
R2
et
f
:
A→R2
, alors pour tout couple (
x,y
)de
A
,
f
(
x,y
)est un couple de réels
dont les deux composantes sont fonctions de
x
et
y
, par conséquent il existe deux fonctions :
f1,f2
:
A→R
telles que :
∀(x,y)∈A,f(x,y) = ( f1(x,y),f2(x,y)).
Par définition, les fonctions f1et f2sont les fonctions composantes de f.
DÉFINITION 27.5
–
Une telle fonction
f
est dite
continue
en
a∈A
lorsque les
fonctions composantes sont continues
en a.
–
Soit
`
= (
`1,`2
)
∈R2
et soit
a∈R2
adhérent à
A
, on dit que
f
admet pour limite
`
en
a
lorsque
fonctions composantes admettent pour limite respectivement `1et `2en a.
Remarques:
– Cela s’applique aussi aux fonctions à valeurs complexes.
– Cette définition se généralise aux fonctions à valeurs dans Rn.
THÉORÈME 27.3
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Ð
Soit f:A→R2,a∈R2adhérent à A, et `= (`1,`2)alors lim
af=`ssi :
∀" > 0,∃α > 0,∀u∈A,ku−ak< α =⇒ kf(u)−`k< ".
Preuve: maxn|f1(u)−f1(a)|,|f2(u)−f2(a)|o¶kf(u)−f(a)k=p|f1(u)−f1(a)|2+|f2(u)−f2(a)|2.
Remarque: On en déduit que fest continue en a∈Assi lim
af=f(a).
Il est facile de vérifier que
C0
(
A,R2
)est un
R
-espace vectoriel pour les opérations usuelles [c’est même
une
C
-algèbre si on remplace
R2
par
C
], et que
la composée de deux fonctions continues est continue
.
II) Calcul différentiel
1) Dérivées partielles premières
Soit
U
un ouvert de
R2
et soit
a
= (
x0,y0
)
∈U
, il existe
" >
0 tel que
B
(
a,p2"
)
⊂A
, par conséquent le
pavé ouvert ]
x0−"
;
x0
+
"
[
×
]
y0−"
;
y0
+
"
[est inclus dans
U
, donc la première application partielle de
f
en aest définie au moins sur l’intervalle ]x0−";x0+"[, et la deuxième sur ]y0−";y0+"[.
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 4

Calcul différentiel Chapitre 27 : Fonctions de deux variables
DÉFINITION 27.6
Si la première (respectivement la deuxième) application partielle de
f
en
a
est dérivable en
x0
(respectivement
y0
), on dit que
f
admet une dérivée partielle par rapport à
x
(respectivement par
rapport à
y
) en
a
, on la note :
∂f
∂x
(
a
)(respectivement
∂f
∂y
(
a
)). Si
f
admet une dérivée partielle par
rapport à
x
en tout point de
U
, alors on définit la fonction :
∂f
∂x:U→R
(x,y)7→ ∂f
∂x(x,y)
,
(même
chose par rapport à y).
Les applications partielles sont des fonctions de
R
dans
R
, on peut donc utiliser les théorèmes généraux
pour étudier leur dérivabilité, et les règles de dérivation usuelles pour les calculs.
Exemple
: Soit
f
(
x,y
) =
x2+y
x2+y2+1
et soit
a
= (
x,y
), on a
f1,a
(
t
) =
t2+y
t2+y2+1
qui est dérivable sur
R
d’où
∂f
∂x
(
a
) =
2x
(x2+y2+1)2; d’autre part f2,a(t) = x2+t
x2+t2+1qui est dérivable sur R, d’où ∂f
∂y(a) = x2(1−2y)−y2+1
(x2+y2+1)2.
THÉORÈME 27.4 (première application)
Ð
Ð
Ð
Ð
Si
f
:
U→R
admet un extremum local en
a
= (
x0,y0
)
∈U
, et si
f
admet ses deux dérivées
partielles en a, alors ∂f
∂x(a) = 0et ∂f
∂y(a) = 0, mais la réciproque est fausse.
Preuve
: Supposons que
a
soit un maximum local, il existe donc
r>
0 tel que
B
(
a,r
)
⊂U
et
∀u∈B
(
a,r
)
,f
(
u
)
¶f
(
a
),
par conséquent
∀t∈
]
x0−r
;
x0
+
r
[
,f
(
t,y0
)
¶f
(
a
), c’est à dire
f1,a
(
t
)
¶f1,a
(
x0
), or la fonction
f1,a
(
t
)est dérivable
en
x0
et
x0
est à l’intérieur de l’intervalle ]
x0−r
;
x0
+
r
[, d’où
f0
1,a
(
x0
) = 0, c’est à dire
∂f
∂x
(
a
) = 0, le raisonnement
est le même pour la deuxième variable.
x
−2
−1
0
1y
−1
0
1
2
z
−3
−2
−1
0
1
2
3
4
5
6
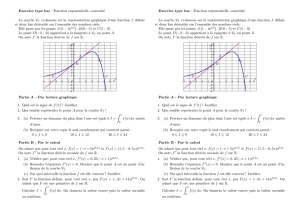
7
z=x2+3y2+2x−4y
minimum en M(−1, 2
3,−7
3)
x
−2
−1
0
1
2y
−2
−1
0
1
2
z
−4
−3
−2
−1
0
1
2
3
4
z=x2−y2,
pas d’extrêmum en (0,0)(point col)
Exemples:
–
Soit
f
(
x,y
) =
x2
+3
y2
+2
x−
4
y
,
f
admet ses deux dérivées partielles sur
R2
, qui sont
∂f
∂x
(
x,y
) = 2
x
+2 et
∂f
∂y
(
x,y
) = 6
y−
4, ces deux fonctions s’annulent pour
x
=
−
1 et
y
=2
/
3, donc le seul point où il peut y avoir
un extremum est
a
= (
−
1
,
2
/
3). On a
f
(
x,y
) = (
x
+1)
2
+3(
y−
2
/
3)
2−
7
/
3, or
f
(
−
1
,
2
/
3) =
−
7
/
3, on voit
donc que f(x,y)¾f(a),fprésente donc un minimum global en a.
–
Soit
f
(
x,y
) =
x2−y2
,
f
admet ses deux dérivées partielles sur
R2
et
∂f
∂x
(
x,y
) = 2
x
et
∂f
∂y
(
x,y
) =
−
2
y
, donc
le seul point où
f
peut présenter un extremum est
a
= (0
,
0), on a
f
(
a
) = 0, or si
t>
0, on a
f
(
t,
0) =
t2>
0
et
f
(0
,t
) =
−t2<
0, donc
f
ne présente pas d’extremum en
a
(ce qui fournit un contre-exemple pour la
réciproque du théorème).
MPSI - COURS cFradin Patrick – http://mpsi.tuxfamily.org 5
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%