Signal de sortie - Le site de Kifouche Rezki

7
Séance 02
II. Terminologie des Systèmes de commande :
II.1 Schéma fonctionnel : Notions fondamentales
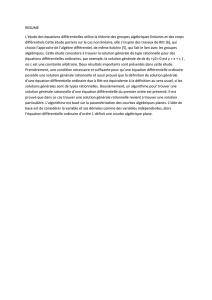
Un schéma fonctionnel consiste en une représentation graphique abrégée de rotation de cause
à effet entre le signal d’entrée et le signal de sortie d’un système physique.
Le schéma fonctionnel le plus simple est constitué d’un seul élément avec un signal d’entrée
et un signal de sortie.
On inscrit à l’intérieur du rectangle représentant l’élément, la description ou le nom de
l’organe ainsi que le symbole de l’opération mathématique à effectuer sur le signal d’entrée
pour obtenir le signal de sortie.
Exemple :
On représente les opérations d’addition et de soustraction d’une manière particulière.
L’élément est figuré par un petit cercle, appelé comparateur ou aboutissent des flèches
portant le signe + ou – selon les cas. Le signal de sortie est constitué par la somme
algébrique des signaux d’entrée. On peut faire aboutir au même comparateur un
nombre quelconque de signaux d’entrées.
On appelle « point de dérivation » le point ou l’on prélève un signal à destination de
plusieurs organes d’un système de commande.
Elément
Signal d’entrée
Signal de sortie
x
+
+
+
x+y+z
z
x
y
+
+
y
x
x+y
+
-
y
x-y
x
a
b
c
x
x
x
x
x
x
x

8
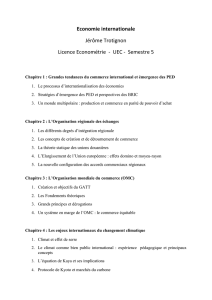
II.2 Terminologie d’un schéma fonctionnel d’un système de commande :
Le schéma fonctionnel ci-dessous illustre la structure de base d’un système de commande
élémentaire en boucle fermée (à retour).
Les termes dont on se sert dans les schémas fonctionnels en boucle fermées peuvent se
ramener à :
Appareil ou processus qui est le système, le sous système ou l’opération placée sous
asservissement.
Signal de sortie réglé c’est la grandeur produite par l’appareil sous asservissement au
moyen du dispositif de contrôle.
La chaine d’action : C’est l’ensemble des éléments placés entre le point de sommation
et la sortie réglée.
Organe de commande : c’est les éléments de la chaine d’action qui engendre le signal
de commande fourni à l’appareil. Les organes de commande sont en général des
régulateurs, des correcteurs, égalisateurs et/ou des amplificateurs.
Signal de commande : c’est le signal de sortie délivré par les organes de commande à
l’appareil.
Chaine de retour : c’est l’ensemble des éléments de la chaine de retour établissant une
relation entre la sortie réglée et le point de sommation.
Signal de référence : ou valeur de consigne, c’est un signal externe fourni au système
asservi, en général sur le sommateur, pour obtenir une réponse déterminée de
l’appareil sous contrôle. Sa valeur correspond au fonctionnement optimal ou désiré de
l’appareil.
Signale de retour primaire : C’est un signal fonction de la sortie réglée fournie par la
chaine retour, que l’on somme algébriquement avec la référence pour obtenir un signal
d’erreur.
Signal d’erreur : C’est la somme algébrique du signal de référence et du signal de
retour. Le système évolue tant que le signal d’erreur ne revient pas à zéro.
Schéma fonctionnel général d’un Système
asservi
Elément de
commande
Appareil
Elément de
retour
Signal
d’entrée de
référence « r »
Signal de sortie
réglé
L’erreur
e = r±b
+
Signal de
commande
b
-

9
II.3 Modélisation des systèmes :
En automatique on procède, principalement, à une modélisation par fonction de transfert
c’est-à-dire une représentation algébrique du comportement de la sortie d’un système excité
par une entrée. Cette modélisation passe souvent par un premier temps qui consiste à établir
les équations différentielles régissant les différentes composantes.
La Transformée de Laplace est l’outil mathématique qui permettra une transformation de
l’espace temps (différentiel) à l’espace de Laplace (algébrique). Des outils graphiques
(diagrammes de Bode , Black, Nyquist) permettent également de caractériser le comportement
d’un système sans avoir à résoudre les équations différentielles qui le régissent et sont basés
sur l’exploitation des fonctions de transfert.
II.4 Outils mathématiques pour l'automatique
En écrivant les équations régissant les dispositifs physiques, ceux-ci ont toujours les
propriétés de causalité et d’invariance (et nous n’étudions ici que les systèmes LTI (Linéaire
et Temps Invariant)), donc à partir du modèle différentiel que l’on peut écrire comme ci-
dessous, on aura toujours
mn
c’est-à-dire que le degré d'évolution de l'entrée (n) est
toujours inférieur au degré d'évolution de la sortie du système (m).
ub
dt
du
b
dt
du
b
dt
du
bya
dt
dy
a
dt
dy
a
dt
dy
an
n
n
n
n
n
m
m
m
m
m
m........ 01
1
1
101
1
1
1
Pour résoudre plus aisément, on utilise un outil mathématique : la transformée de Laplace.
Sinon une résolution analytique, pour certains types d’équations, est possible.

10
III. Les Equations différentielles :
Les équations différentielles constituent un type d’équations qui trouvent de nombreuses
applications dans la modélisation des systèmes physiques. Elles jouent un rôle fondamental
dans la théorie des systèmes asservis. C’est pourquoi, il est important de savoir établir les
équations différentielles, les résoudre et analyser leurs solutions.
III.1 Définition
On appelle équation différentielle une égalité algébrique ou transcendante qui relie une
fonction à ses dérivées. L'équation est dite Equation Différentielle Ordinaire (EDO) si la
fonction ne dépend que d’une seule variable indépendante et que les dérivées sont exprimées
par rapport à cette variable. L'ordre d'une EDO est celui de la dérivée de l'ordre le plus élevé
apparaissant dans l'équation.
L’exemple suivant représente une équation différentielle ou y(t) est la fonction dépendante de
la variable t; x(t) est une fonction qui est, en général, supposée connue.
xy
dt
dy 42
III.2 Equations différentielles linéaires et non linéaires
Les équations différentielles sont partagées en deux classes principales : les équations
différentielles linéaires et les équations différentielles non linéaires.
Une équation différentielle est linéaire si elle est constituée d’une somme de termes
linéaires comme dans les deux exemples suivants :
Exemple 1 :
4.12 y
dt
dy
Exemple 2 :
xy
dtyd
dtyd 2.12.5 2
2
3
3
Une équation différentielle non linéaire contient des termes non linéaires en y(t). Les
exemples suivants représentent des équations différentielles non linéaires.
Exemple 1 :
2)( 3y
dt
dy
Exemple 2 :
x
ey
dt
dy
x 2
2
Exemple 3 :
xy
dt
dy cos2
Notons que dans ce cours, on s’intéressera à particulièrement aux équations différentielles
linéaires. Par ailleurs, il faut noter également, que l’on dispose de méthodes pour résoudre
analytiquement les équations différentielles linéaires. Par contre, on ne dispose pas d’une
théorie générale permettant de résoudre analytiquement les équations différentielles non
linéaires.

11
III.3 Résolution des équations différentielles ordinaires à coefficients constants
Considérons la classe des équations différentielles linéaires à coefficients constants :
n
i
m
ii
i
i
i
i
idt
xd
b
dt
yd
a
0 0
Ou t est la variable indépendante, les coefficients ai et bi sont des constantes, y = y(t) est la
solution inconnue de l’équation que nous cherchons à déterminer. Pour pouvoir préciser le
problème complètement, de manière à obtenir une solution unique y(t), on doit préciser
l’intervalle de la variable indépendante t ou on désire déterminer la solution et l’ensemble
des n conditions initiales portant sur y(t) et ses (n-1) dérivées.
L’ensemble des conditions initiales est :
0
1
1
0,...,),0(
t
n
n
tdt yd
dt
dy
y
On appelle un tel problème un problème aux conditions initiales.
III.3.1 Forme de la solution d’une équation différentielle
La solution totale d’une équation différentielle linéaire à coefficients constants peut
s’exprimer comme la somme de deux parties. La première partie correspond à la solution
sans second membre et la seconde partie correspond à la solution particulière avec second
membre.
a- Operateur différentiel D, équation caractéristique :
Considérant l’équation différentielle à coefficients constants d’ordre m :
uya
dt
dy
a
dt
dy
a
dt
dy m
m
m
m
m
.... 01
1
1
1
Il est commode de définir l’operateur différentiel
, et plus généralement l’operateur
différentiel d’ordre « m » :
.
L’équation différentielle s’écrit maintenant :
Le polynôme en D, s’écrit :
Il est appelé Polynôme caractéristique.
L’équation est appelé équation caractéristique.
La recherche des racines de l’équation caractéristique nous permet d’identifier la famille
génératrice des solutions de l’équation différentielle. Que l’équation admet des racines
distinctes ou multiples, la famille génératrice de solution est définie comme suit :
 6
6
1
/
6
100%