C 2.4

Représentations
schématiques
ll
B
I
E
Ê
T
|
li
Représenter
to
structure
ou
le
fonctionnement
d'un
systeme
tir
t'or'de
des
symbotes
de
representations
schemotiques.
Les
systèmes
fluidiques
lpneumatiques,
hydrauliques]
24
'v'
AC
1 1
;\*\
_'L-_'_Ê
,.
S1
Î-1
S2
'r.l'lli1Dr:lrbtl-lfifl
D
D-
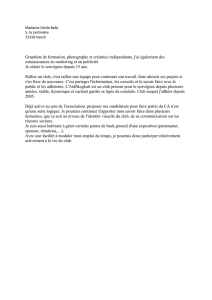
Schema
pneumatique
de
principe
de
commande
d'un
verin
double
effet
par
electrodistributeur
'vérin
double
effet
Ê
Convertir
Manomètre
C9
Restituer
Vérin
simple
effet
Ê
Convertir
Clapet
anti-retour
et
vanne
de
restriction
lvloduler
par
variation
Compresseur
93'
Produire
localement
Distributeur
monostable
4/2
à
commande
électrique
Iïw
lvloduler
par
pilotage
à
deux
niveaux
[TOR]
Moteur
deux
sens
de
rotation
Convertir
Distributeur
manuel
1
voie
:D12
lvloduler
par
pilotage
à
deux
niveaux
[TOR]
Accumulateur
d'air
Stocker
Principaux
symboles
de
schématisation
fluidique
C
2-4
Représentations
schématiques
I
137

Les
systèmes
électriques
0v«rffi=h›=Mz.s)
8
__
G.
L4
|_
r
IJI
af.
_
_
-
.t-.j
'vl
Uni
.
'u
.
L5
I
_
_1_\_
_-'Ê'-"1'
I
[D1-J]
[CI1-J]
L4
_-au
su
1
|
.
Im
I
1
|_'l1
4:P:'
.
Il
P
L?
_
Q
L11
L9 L?
Lis
1.13
Lrs
Ls
*Lis
*íur
_ _ _ _
_
1|"I.1
I,
3.fl-'Z
.
5|"l3
5
'lr'I.1
:_
3.I'L2
5.r"l3
1
2
I
u
loir:
xrva
-:fil
Î
_ _ _ _
me
-
H
1
_
_
-ii
[D2
K]
__
_.
En
W
am
W
lim
,..-';'.i2;-.ff
"',<Î
Tl
I I I
ÈÊ'
I
I
,"
"*
L9
L11
LB
Un
r
F1
'1
Lu
tn
LID
1
-1*
L6
I-r:1o-:sm
nr
ro
ra
Ul
LI5
13 23
oav.
en
*-.j---'-._
KM'
mraaror-si
-
'
*[02-M1!
1-1
14
,m
W
Lui
us
U
1-
11']
_.-'
. .
*
rn
3
L1:
,_
C'
.
'_
U
.
'
5---r›.1.
2 2
1
mlfl
*HPS
\ÈHH
L
-_
.I
L12
Lu
P
*
U
(12
un
'
' '
La
!;
Lro
Liz
un
i
La La
04
ce
.
. .
. .
. .
.
___;
*[02-B]
[D1-.M
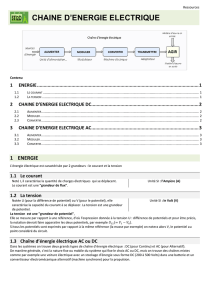
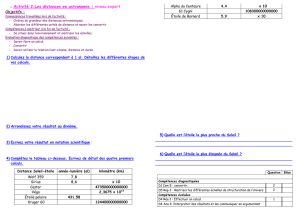
Schéma
électrique
d'un
chauffage
industriel
double
puissance
Réseau
monophasé
d'énergie
électrique
(phase.
neutre.
terre]
PhaseÎ
NeutreÎ
LT
Alimenter
Fusible
Disjoncteur
'r
.|____
2
Protéger
Moteurs
à
courant
alternatif
monophasé
et
triphasé
@
Convertir
Lampe
-®-
Convertir
Contacteur
de
commande
#1
iii
Moduler
par
pilotage
à
deux
niveaux
[TOR]
Résistance
2_l:l_.
Convertir
1
2
Transformateur
3
4
Alimenter
Batterie
Î-|+
Produire
localement
Contact.
bouton
_”
poussoir.
contact
T
NO.
contact
NF,
en
tout
ou
rien
commutateur
_r--___
Moduler
Convertisseurs
Exemple
:
DCIDC
_
“C
(variable)
Moduler
par
variation
Document
4
Principaux
codes
de
schématisation
électrique
138

Les
systèmes
électroniques
0
v«›rffi=h›=Mz.s}
23UVl'15"v'
T
I'
2
'I
8
île-I
Flfla
:rare
in
"
Élu
H
(
A
'
mi
“L1
'
Á
ÿ
I
I
1
3atl2
!$Lm
1
F2
I I
U
I
U
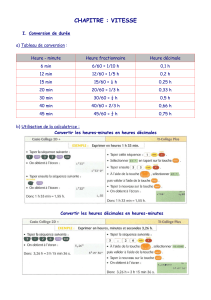
Schéma
électronique
de
principe
d'une
alimentation
stabilisée
230
'v'
AC/
15
V
DC
Générateurs
à
courant
continu
:
de
tension,
de
courant
U
I
Alimenter
Transistor
bipolaire
NPN
Moduler
par
variation
ou
par
pilotage
à
deux
niveaux
[TDR]
Résistance
électrique
Potentiométre
Moduler
Moduler
par
variation
rfi.
K
Thyristor
'
I
Ê
G
Moduler
par
variation
ou
par
pilotage
à
deux
niveaux
[TDR]
Condensateur
polarisé
dh
Stocker
Triac
ÈÈHA
G
Moduler
par
variation
ou
par
pilotage
à
deux
niveaux
[TDR]
lnductance
sans
noyau
_/"Y"\f`Y""›__
Stocker
Régulateur
de
tension
"B
V
2
Moduler
par
variation
Diode
et
diode
Zener
LED
ÁHKÁHK
.t
if
K
Moduler
par
pilotage
à
deux
Pont
de
diodes
niveaux
[TDR]
.
Moteur
à
courant
1
2
Restrtuer
.
+
_
continu
1
3
4
2
Adapter
Convertir
T
.
2
Amplrficateur
-
“+5
5
linéaire
intégré
3
+
“_
4
Traiter
Document
6
Principaux
codes
de
schématisation
électronique
C
2-4
Représentations
schématiques
I
139

Les
systèmes
mécaniques
Axe
moteur_Î.
"
Z
Référence
fixe
ngrenage
droit
pivot
d'axe
Z
“
.Î
Liaison
pivot
Schéma
cinématique
partiel
du
drone
en 2
dimensions
Aucun
degré
Encastrement
X
de
liberté
Z
z z
Pivot
$_>?_
_å_›
X
Rx
Rotule
ou
sphéfique
Z Z
'ir'
"v'oir
fiche
C
3.6
Rx,
Ry,
R2
x
Z Z
Glissière
_|£|_,
Tx
igr
X
I
Z Z
T
ri
Hélico'i'dale
_$_›
X
EF
X.
Y
X
conJugues
Appui
plan
ou
Plan
I
plan
Linéaire
rectiligne
ou
Cylindre
I
plan
Z Z
L
l
Tx,
Ty
r
gr
|
gi
RZ
je-›
Z Z
Tx,
Ty
Flx,
R2
x
CY
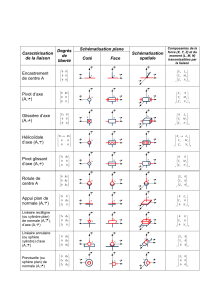
Document
8
Symboles
des
liaisons
cinématiques
Pivot
giissanr
Z Z
ou
Cylindre
I
lindre
ii'
X
Tx
Rx
Linéaire
annulaire
ou
Sphère
I
cylindre
Ponctuelle
ou
Sphère]
plan
Engrenage
droit
Crémaillère
_I_
Poulie
courroie
šz
z
ê
Tx
'ir
r
X
Fix,
Fly,
Rz
3
Z
Tx,
Ty
›
.
)
Rx,
Fly,
Rz
y x
_U
___.
1
1.
/WT;/FV
Roue
et
vis
sans
fin
-
-
*
Document
9
Symboles
cinématiques
des
transmissions
mécaniques
140

Les
systèmes
thermiques
~
z
'it
\
\
_\_.
\__
"
f'
\.--
1-.
1*
Aiin-.enmiian
_
_
*
_
_
électrique
I
[_
S1-Circulateur
_
_
ECS
solaire
'Î
Il
v'§
X.
T1
-
Sonde
de
temperature
H
'*
_
'
capteur
solaire
-'J
ef
r
-_.-*
...
l
l
il
Sonde
de
L
temperature
T2
-
Sonde
de
temp-é
=
re
ballon
solaire
-
-
sa
0
Vidange
I
“
.
iii
i:i
Eau
froide
'
'
'
a
4
b
Ê
È
Prévoir
un
réi::ludaur
da
pression
Groupe
de
si
pression
sup-aneura
ara
ear
avez
mum
Eau
chaude
oeiiiimeire
Q
"I
Document
10
Schéma
hydraulique
de
principe
d'un
chauffe-eau
solaire
individuel
Vanne
2
voies
Vanne
3
voies
X
Moduler
par
pilotage
à
deux
niveaux
[TDR]
Moduler
par
variation
Êchangeur
hofizontal
Transmettre
Mitigeur
Èe
Moduler
par
régulation
Régulateur
Ê
Traiter
Vase
d'expansi
0|"l
@
Moduler
par
régulation
Circulateur
I
Pompe
Convertir
Principaux
codes
de
schématisation
thermique
Manomètre
C?
Restituer
Thermostat
Acquérir
Capteur
thermique
plan
Produire
localement
Êchangeur
å
plaque
Convertir
Ballon
[échangeur
thermique
et
appoint
électrique)
Z
Stocker
et
produire
localement
C
2-4
Représentations
schématiques
I
141
1
/
5
100%