sujet 41

Point matériel glissant sur un cercle ou sur une sphère
A) Point matériel lié à un cercle vertical
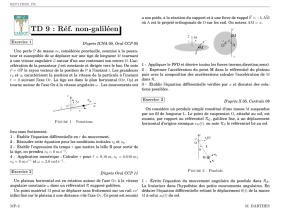
On considère un point matériel M, de masse m. Ce point matériel est constitué par un petit anneau enfilé
sur une tige circulaire, contenue dans un plan vertical, de centre O, de rayon , de diamètre vertical AB. Le
champ de pesanteur, localement uniforme, est
g g j
.
La position de M est repérée par l'angle
OA OM,
, compté positivement dans le sens indiqué sur
la figure ci-dessous.
y
B
O
A
x
M
i
j
T
N
.
B
La position initiale, à la date ti = 0, du point matériel M est le point A (i = 0), sa vitesse angulaire
initiale
i
est positive.
On utilisera les vecteurs unitaires
T
,
N
et
B
du trièdre de Frenet. On notera 0
g
et T0 =
2
0
.
1) Mouvement en l'absence de frottement
On notera
R
la réaction de la tige circulaire sur l'anneau M et RT, RN et RB ses coordonnées dans le
repère de Frenet :
R R T R N R B
T N B
.
1.1) a) Démontrer que RB est nul.
b) Dans toute la suite du A)1), l'anneau M est mobile sur la tige circulaire sans aucun frottement.
Que vaut RT ?
c) Le signe de RN est-il connu à priori ?
1.2) a) Écrire les deux équations obtenues en projetant la relation fondamentale de la dynamique sur
T
et sur
N
, avec m, g, , RN, et ses dérivées successives par rapport à la date t, notées
et
.
b) En déduire l'équation différentielle vérifiée par et
, avec 0 comme seul paramètre.

c) Intégrer cette équation différentielle, après multiplication des deux membres par
, pour
exprimer
avec
i
et 0.
1.3 a) Exprimer avec 0 la valeur minimale
0
de
i
permettant à M d'atteindre le point B.
b) On lance l'anneau M depuis A, avec la vitesse angulaire initiale
0
calculée au A)1.3.a)
Exprimer RN en fonction de , avec m et g comme paramètres.
La réaction
R
change-t-elle de sens au cours du mouvement ? Dans l'affirmative, calculer pour quel
ensemble de valeurs de on a RN > 0.
1.4) On donne maintenant à la vitesse angulaire initiale la valeur
i
= 3 0.
a) Exprimer
en fonction de , avec 0.
b) En déduire la durée T d'un tour complet ainsi que le rapport
T
T0
, connaissant la valeur de
l'intégrale :
0
d
7 2 1206
cos ,
.
c) Quelles sont, exprimées avec
v g
0
comme seul paramètre, les valeurs de la norme
minimale vm, de la norme maximale vM et de la norme moyenne <v> de la vitesse au cours du mouvement ?
1.5) Pour
i
suffisamment petit, l'élongation angulaire reste très petite. Intégrer l'équation différentielle du
mouvement dans ce cas particulier, pour exprimer en fonction de t, avec les paramètres 0 et
i
.
2) Mouvement avec frottement fluide
Le mouvement décrit précédemment est irréalisable pratiquement, du fait du frottement solide entre la
tige et l'anneau, dont on n'étudiera pas l'effet ici. On peut cependant, grâce à une lubrification suffisante,
remplacer ce frottement solide par un frottement fluide caractérisé par une force liée à la vitesse de M par la
relation
F k v
dans laquelle k est une constante positive.
2.1) Écrire à nouveau l'équation différentielle du mouvement en projection sur
T
, avec ,
et
, avec les
paramètres 0 et
k
m2
.
2.2) On suppose que k est tel que le mouvement se fait en régime critique pour les petits angles .
a) Quelle est alors la relation entre et 0 ?
b) L'anneau M est lancé du point A, avec une vitesse angulaire
i0
5
, exprimer la loi horaire
solution de l'équation différentielle du A)2.1) pour restant suffisamment petit.
c) Cette solution convient-elle pour tout le mouvement ? On pourra considérer qu'il en est ainsi si la
valeur maximale de , que l'on calculera, reste inférieure à 5° .
d) Calculer la valeur de à la date T0 et donner l'allure du graphe de = f(t).
B) Point matériel en mouvement sur une sphère
Le point M est maintenant un petit objet glissant sans frottement, sur une sphère de centre O, de rayon a,
dans le plan vertical du grand cercle de diamètre vertical AB.
On utilisera encore ici la figure et les notations du A). On pourra utiliser sans nouvelle démonstration les
résultats du A) qui ne sont pas modifiés.

1) Point matériel glissant sur la surface intérieure de la sphère
À la date t = 0, le point matériel M est lancé du point A d'élongation angulaire i = 0, avec la vitesse
angulaire
i
= 2 0 ; il glisse sans frottement sur la surface intérieure de la sphère
1.1) Que peut-on dire de RT et du signe de RN ?
1.2) a) Écrire les deux équations obtenues en projetant la relation fondamentale de la dynamique sur
T
et sur
N
, avec m, g, , RN, et ses dérivées successives par rapport à la date t.
b) En déduire l'équation différentielle vérifiée par et
, avec 0 comme seul paramètre.
c) Donner les expressions, en fonction de , de la vitesse angulaire
avec le paramètre 0, et de
RN avec les paramètres m et g.
1.3) a) Pour quelle valeur 1 de , exprimée en degrés, le contact est-il rompu entre la sphère et le point
matériel M ?
b) Quelles sont à l'instant de la rupture du contact les coordonnées cartésiennes x1 et y1 de M ?
c) Quelle est alors la vitesse angulaire
1
, exprimée avec 0 ?
d) Exprimer, avec et 0, les coordonnées cartésiennes
x
1
et
y
1
et la norme v1 de la vitesse su
point M à l'instant où le contact est rompu ?
1.4) Exprimer, avec et 0, la durée t1 du contact de M avec la sphère. Pour l'intégration nécessaire à la
résolution de cette question, on pourra effectuer le changement de variable
u
sin
2
.
1.5) a) Après la rupture du contact, donner les équations paramétriques du mouvement, sous la forme :
x f t t ( )
1
et
y g t t ( )
1
.
b) En déduire que l'équation cartésienne de la trajectoire, pour t > t1, s'écrit sous la forme suivante :
yx x
27
16 5 5
89
16
2
(équation I)
c) Quelle autre relation (équation II), vérifient les coordonnées x2 et y2 du point M quand il reprend
contact avec la sphère ?
1.6) La résolution du système formé par les équations I et II donne la solution (x1,y1) et la solution (x2,y2),
avec x2 de l'ordre de 0,6 .
a) Préciser la valeur de
x2
avec 3 chiffres significatifs, en utilisant la fonction graphique ou la
fonction de résolution des équations de votre calculatrice.
b) En déduire y2 avec la même précision.
c) Calculer la durée totale t2 du mouvement depuis le lancement en A jusqu'au rétablissement du
contact avec la sphère, exprimée avec T0.
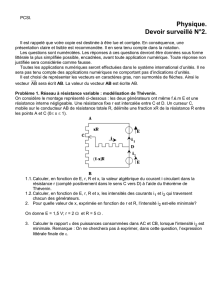
2) Point matériel glissant sur la surface extérieure de la sphère
Le point matériel M glisse, toujours sans frottement, sur la surface extérieure de la sphère.
La position de M est maintenant repérée par l'angle
OB OM,
compté positivement dans le sens
indiqué sur la figure ci-dessous.

y
B
O
A
x
i
j
T
N
M
Mi
i
À la date ti = 0, le point matériel M est lancé du point Mi d'élongation angulaire i telle que i >0 et i
0, avec la vitesse angulaire initiale
i
= 0.
2.1) Que peut-on dire de RT et du signe de RN ?
2.2) a) Écrire les deux équations obtenues en projetant la relation fondamentale de la dynamique sur
T
et sur
N
, avec m, g, , RN, et ses dérivées successives par rapport à la date t.
b) En déduire l'équation différentielle vérifiée par et
, avec 0 comme seul paramètre.
c) En assimilant i à la valeur 0, donner les expressions, en fonction de , de la vitesse angulaire
avec le paramètre 0, et de RN avec les paramètres m et g.
2.3) Pour quelle valeur 1 de , exprimée en degrés, le contact est-il rompu entre la sphère et le point
matériel M ?
2.4) Calculer la durée t1 du contact, en fonction de T0 et i. Pour l'intégration nécessaire à la résolution de
cette question, on pourra effectuer le changement de variable
u
cos
2
.
2.5) a) Tant que est très petit, exprimer la loi horaire = f(t), avec les paramètres 0 et I, en utilisant
les fonctions trigonométriques hyperboliques.
b) La loi horaire trouvée reste-t-elle valable jusqu'à la rupture du contact ?
1
/
4
100%