mécanique du point matériel - Plate

MÉCANIQUEDUPOINTMATÉRIEL
Cours&Applications
HichemChaabane
ProfesseurdePhysiqueàl'ISITCom‐HammamSousse‐Tunisie
Année2010

TabledesMatières
ChapitreI:CinématiqueduPointMatériel………………………………………………………………………………02
ChapitreII:DynamiqueduPointMatérielDansUnRéférentielGaliléen………………………………….22
ChapitreIII:TravailEtÉnergie………………………………………………………………………………………………….37
ChapitreIV:L'OscillateurHarmoniqueEtamortiParFrottementFluide………………………………….49
ChapitreV:OscillateurHarmoniqueEnRégimeForcé……………………………………………………………..61
ChapitreVI:LeMomentCinétique…………………………………………………………………………………………..66
ChapitreVII:LesChangementsDeRéférentiels……………………………………………………………………….71
ChapitreVIII:DynamiqueduPointMatérielDansUnRéférentielNonGaliléen………………………78
ChapitreIX:SystèmeDeDeuxPointsMatérielsEnInteraction………………………………………………..92
ChapitreX:LesMouvementsÀForceCentrale………………………………………………………………………..103

ChapitreI:CinématiqueduPointMatériel
MécaniqueduPointMatérielHichemChaabane‐Année2011ISITCom‐HammamSousse
2
ChapitreI
CINÉMATIQUEDUPOINTMATÉRIEL
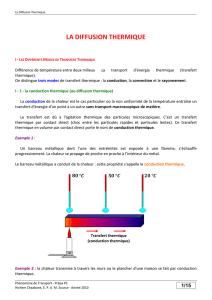
Lamécaniqueétudielemouvementdescorpsetlarelationentrecemouvementetdesnotionsphysiques
tellesquelaforceetlamasse.Ellesediviseentroisparties:
‐lacinématiquequiapourobjetl’étudedemouvementenfonctiondesconceptsd’espaceetdetemps
enfaisantabstractiondesescauses.
‐ladynamiquequiétudielesrelationsentrelesmouvementsetlesforcesquilesproduisent.
‐lastatiquequiestl’étudedeséquilibresetdesconditionsauxquelsdoiventsatisfairelesforces
s’exerçantsuruncorpspourqu’ilresteaureposs’ill’estinitialement.Dansnotrecasnousneparleronsquetrès
peudelastatique,enlamentionnantcommecasparticulierdeladynamique.
I‐DÉFINITIONSFONDAMENTALES
I‐1‐pointmatériel
Unmouvementestlechangementcontinudelapositiond’unobjetetpeuts’accompagnerderotationsoude
vibrations.Dansdenombreusessituations,onpeuttraiterl’objetcommes’ils’agissaitd’uneparticule.C’està
direquel’étatmécaniquedusystèmepeutêtresuffisammentbienreprésentéparlescoordonnéesd’unpoint.
C’estunélémentmatériel,cohésif,depetitesdimensionsparrapportauxautresdimensionsmisesenjeu.Onlui
associeunscalairepositifappelésamassequiestlaquantitédematièrecontenuedanslevolumedel'objet.
I‐2‐événement
Lesphénomènesphysiquespeuventêtreconsidéréscommeunensembled’événements,c’estàdiredes
phénomènesélémentairesquiseproduisentendesendroitsdéterminésdel’espaceetàuninstantdonné.
I‐3‐temps
EnmécaniqueNewtonienne,letempsestunevariableindépendantereprésentéegénéralementparlalettre
àl'exclusiondetouteautrenotation(saufprécisionsparticulièresàunproblèmedéterminé),quirepèrel’instant
oùl’événements’estproduit.Cettevariabletempss’écouledansunsensetpasdansl’autre(dansunsenstelque
lacauseprécèdel’effet):telévénementalieuaprèstelautre.Quandonsaitclasserlasuccessiontemporelledes
événementsonditquel’onaétablitunechronologie.
Noussupposonsaussiqueletempsestuniforme,cequirevientàdirequelesloisphysiquessontinvariantespar
translationdansletemps.
I‐4‐repèred’espace
Onappellerepèred’espace,unensembledepointsdontlesdistancessontinvariablesaucoursdutemps.On
caractérisegénéralementunrepèred'espaceparunpoint,originedurepère,choisiconventionnellementet
unebase(
,
,
)dontonaintérêtàlachoisirorthonormée.
I‐5‐notionsderéférentieldetempsabsolu
Pourdéfinirlapositiondesdifférentspointsdel’espacegéométrique,unobservateurutiliseraunrepère
d’espace(systèmedecoordonnéesquiluiestlié)etunehorlogepourmesurerlestemps.Cerepèreespace‐
tempsestappeléréférentiel.

ChapitreI:CinématiqueduPointMatériel
MécaniqueduPointMatérielHichemChaabane‐Année2011ISITCom‐HammamSousse
3
Noussupposonsqueletempsestunenotionabsolueindépendanteduréférentiel,c’estàdiredeuxobservateurs
liésàdesréférentielsdifférentsattribuentlesmêmesdatesauxmêmesévénements.Notonsaussiquelamasse
d'unpointmatérieldéfiniedansleparagrapheI‐1,estinvariableaucoursdutempsetparchangementde
référentiel.
I‐6‐mouvement
Ilfautavanttoutnoterquelanotiondemouvementestrelative.Iln'estpaspossibledeparleravecprécision
d'unmouvementsansdireparrapportàquoionl'observe,c'estàdiresansdéfinirunréférentiel.L'énoncéd'un
mouvementdevraobligatoirementêtresuivideceluiduréférentielcorrespondant.
Onditqu’unpointmatérielestenmouvementsil’uneaumoinsdesescoordonnéesvarieavecletemps.Si
lescoordonnéesdupointsontconstantesaucoursdutemps,lepointestditimmobileouaurepos
(toujoursparrapportàunréférentielbiendéterminé).
I‐7‐trajectoire
Considéronsunpointenmouvementparrapportàunréférentielnoté.Lacourbedécriteparcepoint
quandletempss’écouleestappeléetrajectoiredupointdansleréférentielconsidéré.C’estlelieu
géométriquedespositionseffectivementoccupéesparlepointmatérielquandletempss’écoule.
I‐8‐vecteurespace(vecteurposition)
Soitl’originedurepèreespaceetsoitlaposition,àl’instant,delaparticulesursatrajectoire.On
appellevecteurespace(ouaussivecteurposition)levecteur
,fonctionvectorielledutemps.Onécrit:
I‐9‐équationhorairedumouvement
Considéronsunetrajectoire()décriteparunpointmatérielenmouvementdansunréférentieldebase
orthonorméedirecte,,
.
Soitlapositiondecetteparticuleàl’instantetsoit
sapositionsur()àl’instant.
L’arcentreetestégaleà
estappeléabscissecurvilignede
Pardéfinition,onappelleéquationhorairedu
mouvementl’équationdonnantl'abscissecurviligneen
fonctiondutemps:
Dansunrepèreàtroisdimensions(parexemple
cartésien)ondoitfournirtroiséquationsdumêmetype:
; et
II‐REPRÉSENTATIONDESTRAJECTOIRES
II‐1‐différentssystèmesdecoordonnées
Enphysique,ondoitsouventlocaliserdesobjetsdansl’espaceetonsesertpourceladescoordonnées.On
peutsituerunpointsuruneligneàl’aided’uneseulecoordonnée(abscisse),unpointdansunplanàl’aidede
deuxcoordonnées(abscisseetordonnée)etunpointdansl’espaceàl’aidedetroiscoordonnées(abscisse,
ordonnéeetcôte).
M
O
sensdumouvement

ChapitreI:CinématiqueduPointMatériel
MécaniqueduPointMatérielHichemChaabane‐Année2011ISITCom‐HammamSousse
4
Pourdéfinirdespositionsdansl’espace,lesystèmedecoordonnéesutilisédoitcomprendre:unpointde
référence,appeléorigine(souventnoté),unsystèmed’axesorientésetdesmoyensderepérerlapositiond’un
pointdel’espaceparrapportàl’origineetauxaxes.
Soitdonc,unsystèmedetroisaxesrectangulaires,forméparlestroisvecteursunitairesorthogonaux,,et
et
d’origineetsoitunpointdel’espace,sapositionestdéfinieparlevecteurposition
.
L’expressiondecevecteurpeutprendredifférentesformesselonlesystèmedecoordonnéesutilisé.
II‐1‐a‐coordonnéescartésiennes
Onappellecoordonnéescartésiennesdupoint,lestroisvaleursalgébriques,,etpermettantde
localisercepointdanslerepèred’espace(O,,,
).
Lescomposantesduvecteurpositionsontlesvaleursalgébriquesdesprojectionsorthogonalesde
surles
directionsdéfiniesparlesvecteursdebase.Onécritalors:
avec,et∈∞,∞
Siseulelacoordonnéevariede,lepointsedéplacededansladirectiondansladirectiondu
vecteurunitaire;ilenseraitdemêmedesdeuxautrescoordonnées.
Cesdéplacementsélémentairespermettentdedéfinir:
‐unvecteurdéplacementélémentaire:
‐unvolumeélémentaire:
II‐1‐b‐coordonnéescylindriques
Ilarrive,souvent,qu'unproblèmeaitunesymétriecylindrique,ilestpluscommodealorsd'utiliserlesystème
decoordonnéescylindriques.
Onappelleéletriplet(,,),permettantdelocaliserlepointtoutaussi
bienqueletriplet(,,).
Soitlepoint,projetéorthogonaldesurleplan
Leparamètrereprésenteladistance
etl’angleentreet
.
y
z
x
M
x
z
O
dy
x+dx
z+dz
dz
dx
y+dy
y
y
z
x
i
k
M
x
y
z
O
j
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
1
/
119
100%