Cours de physique: cinqui`eme

Cours de physique: cinqui`eme
Yves Delhaye
14 septembre 2006

Copyright (c) 2004 Yves Delhaye.
Permission is granted to copy, distribute and/or modify this document
under the terms of the GNU Free Documentation License, Version 1.2 or
any later version published by the Free Software Foundation ; with no In-
variant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy
of the license is included in the section entitled ”GNU Free Documentation
License”.

Premi`ere partie
Mouvements r´eels
1


Chapitre 1
Les Mouvements `a deux
dimensions : Cin´ematique du
mouvement curviligne
1.1 Introduction
1.1.1 Texte `a analyser
1.1.2 Rappels de cin´ematique
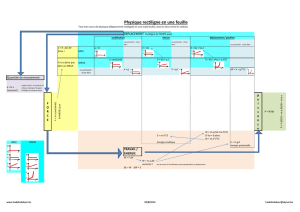
Syst`eme de r´ef´erence(rep`ere orthonorm´e ou cart´esien), trajectoire
Tableau des grandeurs vue en cin´ematique
Grandeurs symboles unit´es formule
position e (ou x, ou r) m ef(t) = ei+vi.t + 1/2.a.∆t2
d´eplacement ∆e(ou∆x, ou∆r) m ∆e=ef(t)−ei=vi.t + 1/2.a.∆t2
instant t s -
dur´ee ∆ts ∆t=tf−tie
vitesse v m/s vf(t) = vi+.a.∆t
acc´el´eration a m/s2-
3
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
1
/
45
100%