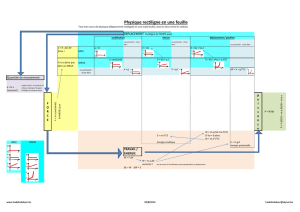
Cinématique ≠0=constante Si

Cinématique
Du point :
Déplacement du centre de gravité d’une pièce par rapport à une autre (référence)
Déplacement :
Exemple :
Translation d’axe x
Rotation d’axe z
Translation circulaire
trajectoire :
Trace d’un point appartenant à une pièce de référence
position :
Un lieu d’un point appartenant à une pièce de référence à un temps particulier
Notation :
Translation x(t) ou y(t) ou z(t)
- unité mètre
Rotation x(t) y(t) z(t)
-unité radian
vitesse :
C’est la dérivée par rapport au temps de la position notation Tx v(t)=dx(t)/dt unité m/s
Rx ’(t)=°(t)= ohm(t)=d (t)/dt
(en rd/s ou s-1 )
Accélération : dérivée de la vitesse par rapport au temps ou dérivée seconde de la position par rapport
au temps.
Notation x gamma (t) =a(t)=v’(t)=x’’(t) d2x(t)/d2t=d v(t)/dt
Idem pour la rotation mais avec angle en radian
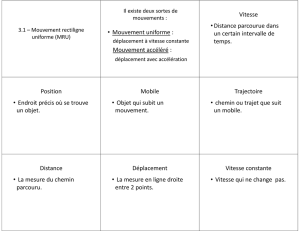
Type de mouvement
MRU =0
MRUV (≠0)
MRUA ( >0)
MRUD ( <0) idem pour angle avec
Graphique :
=0 MRU
>0 MRUA
<0 MRUD
Accélération
Vitesse
Tan==v/t
=angle courbe axe
position
MRU= Mouvement
Réctiligne Uniforme
A=accéleration
D=décéleration
Equations finales :
Si ≠0=constante
V(t)=.(t-t0)+v0
X(t)=1/2 (t-t0)2 + v0(t-t0) + x0
1
/
1
100%