1, 2, 3...Sciences

1, 2, 3. . .Sciences
Ann´ee acad´emique 2009-2010
Exercices de math´
ematiques
Liste type num´
ero 1 (fin)
Liste type num´
ero 2
R´
ep´
etition 2 : solutions
Version 11 janvier 2010(V1 : 29/08/09)

VII. Equations cart´esiennes de droites
On se place dans le plan muni d’un rep`ere orthonorm´e.
1. Quelle est la forme canonique de l’´equation cart´esienne d’une droite dans le
plan ? Indiquer ce que repr´esente chacune des lettres utilis´ees.
La forme canonique de l’´equation cart´esienne d’une droite dans le plan est donn´ee par
ax +by +c= 0 o`u a, b, c sont des r´eels, aet bn’´etant pas simultan´ement nuls.
2. a) Quelle est l’´equation cart´esienne d’une droite passant par le point de co-
ordonn´ees cart´esiennes (x1, y1)et de coefficient angulaire m(x1, y1, m sont des
r´eels) ?
L’´equation cart´esienne d’une droite passant par le point de coordonn´ees cart´esiennes
(x1, y1) et de coefficient angulaire mest y−y1=m(x−x1).
b) Si cette droite a pour vecteur directeur le vecteur de composantes (a, b), quel
lien existe-t-il entre met (a, b)?aet bpeuvent-ils ˆetre des r´eels quelconques ?
Expliquer.
Le coefficient angulaire mest ´egal `a b
asi a6= 0.
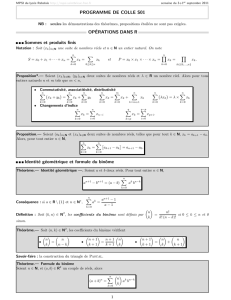
c) Sans en d´eterminer l’´equation cart´esienne, repr´esenter graphiquement la
droite passant par le point de coordonn´ees cart´esiennes (−1,2) et de coefficient
angulaire −1
3.
-
6
-
?
1-1 1 2
1
Y
X
(-1,2)
3. a) Quelle est l’´equation cart´esienne d’une droite passant par les points distincts
de coordonn´ees cart´esiennes respectives (x1, y1)et (x2, y2)? Envisager tous les
cas possibles.
L’´equation cart´esienne d’une droite passant par les points distincts de coordonn´ees cart´esiennes
respectives (x1, y1) et (x2, y2) est
y−y1=y2−y1
x2−x1
(x−x1) si x2−x16= 0.
Si x1=x2alors la droite a pour ´equation cart´esienne x=x1.
b) Si cette droite a pour vecteur directeur le vecteur de composantes (a, b), quel
lien existe-t-il entre (x1, y1),(x2, y2)et (a, b)?
Le vecteur de composantes (a, b) est un multiple non nul du vecteur de composantes
(x2−x1, y2−y1).
4. Quelle est l’´equation cart´esienne d’une droite passant par le point de coor-
donn´ees cart´esiennes (x1, y1)et parall`ele `a
(a) l’axe des abscisses ?
L’´equation cart´esienne de cette droite est y=y1.
(b) l’axe des ordonn´ees ?
L’´equation cart´esienne de cette droite est x=x1.
2

5. a) Si deux droites non parall`eles aux axes sont
(i) orthogonales entre elles, que peut-on dire de leurs coefficients angulaires ?
Le produit des coefficients angulaires de 2 droites non parall`eles aux axes et orthogonales
entres elles est ´egal `a -1.
(ii) parall`eles entre elles, que peut-on dire de leurs coefficients angulaires ?
Les coefficients angulaires de 2 droites non parall`eles aux axes et parall`eles entres elles sont
´egaux.
b) Donner l’´equation cart´esienne de la droite passant par le point de coor-
donn´ee (0,1) et orthogonale `a la droite d’´equation x+y+ 1 = 0. Repr´esenter
graphiquement ces deux droites dans un mˆeme rep`ere.
L’´equation demand´ee est x−y+ 1 = 0.
-
6
X
Y
1
1
x-y+1=0
x+y+1=0
6. a) Donner l’´equation cart´esienne de la droite passant par les points de coor-
donn´ees (−2,1) et (2,3) ainsi que celle de la droite passant par (−2,1) et (−2,0).
Les ´equations demand´ees sont respectivement x−2y+ 4 = 0 et x+ 2 = 0.
b) Repr´esenter graphiquement ces deux droites dans un mˆeme rep`ere.
-
6
X
Y
1
1
x-2y+4=0
x+2=0
7. a) Si on a un vecteur directeur d’une droite de composantes (a, b)et un point
de coordonn´ees (x1, y1)par lequel elle passe, en donner des ´equations pa-
ram´etriques cart´esiennes.
Des ´equations param´etriques cart´esiennes de cette droite sont
x=x1+ra
y=y1+rb , r ∈R
On consid`ere la droite d’´equation cart´esienne x+y+ 1 = 0.
b) Donner les composantes d’un vecteur directeur de cette droite.
Un vecteur directeur de cette droite a pour composantes (1,−1) (ou tout autre multiple
non nul de ce couple).
c) Donner les coordonn´ees d’un point de cette droite.
Un point de cette droite a pour coordonn´ees (0,−1) par exemple.
d) Donner des ´equations param´etriques cart´esiennes de la droite d’´equation
3

x+y+ 1 = 0.
Des ´equations param´etriques cart´esiennes de cette droite sont
x=r
y=−1−r, r ∈R
e) Pour quelle valeur du param`etre, la droite passe-t-elle par le point de coor-
donn´ees (−√2,√2−1) ?
La droite passe par le point de coordonn´ees (−√2,√2−1) si r=−√2.
VIII. R´esolution de syst`emes lin´eaires
1. a) Quels sont les processus les plus fr´equemment utilis´es pour r´esoudre les
syst`emes lin´eaires ?
Les processus les plus fr´equemment utilis´es pour r´esoudre un syst`eme lin´eaire sont la sub-
stitution et les combinaisons lin´eaires.
b) Si on consid`ere l’´equation 2y+x= 1, la repr´esenter graphiquement dans un
rep`ere cart´esien du plan. Quel est le nom de cette courbe ?
-
6
X
Y
1
1
2y+x=1
Cette courbe est une droite.
c) R´esoudre le syst`eme y−x= 0
2y+x= 1
Ne pas oublier de mentionner l’ensemble des solutions.
L’ensemble des solutions du syst`eme est S=1
3,1
3.
d) Comment interpr´eter graphiquement ce syst`eme et son ensemble de solu-
tions ?
Ce syst`eme est constitu´e par les ´equations de 2 droites s´ecantes au point de coordonn´ees
(1
3,1
3).
2. a) Dans le plan, repr´esenter graphiquement le syst`eme x−2y+ 1 = 0
2x−4y+ 3 = 1
-
6
X
Y
1
1x-2y+1=0
2x-4y+3=1
4

b) Comment interpr´eter graphiquement ce syst`eme et son ensemble de solu-
tions ?
Ce syst`eme est constitu´e par les ´equations de 2 droites parall`eles confondues. L’ensemble
des solutions est l’ensemble des points de la droite.
c) R´esoudre ce syst`eme et donner son ensemble de solutions.
L’ensemble des solutions est S={(2y−1, y) : y∈R}; le syst`eme est simplement
ind´etermin´e.
d) Faire de mˆeme avec le syst`eme x−2y+ 1 = 0
2x−4y+ 3 = 0
-
X
6
Y
1
1x-2y+1=0
2x-4y+3=0
Ce syst`eme est constitu´e par les ´equations de 2 droites parall`eles distinctes. L’ensemble
des solutions est l’ensemble vide.
3. a) Si on consid`ere l’´equation y+x+z= 1, comment peut-on la repr´esenter
graphiquement dans un rep`ere cart´esien de l’espace ? Quel est le nom de cet
´el´ement ?
-
Y
6
Z
X
1
1
1
L’´equation donn´ee est celle d’un plan.
b) Si on a un syst`eme form´e de deux ´equations de ce type, quelles situations
peut-on avoir graphiquement ? En d´eduire le type d’ensemble de solutions dans
chacun des cas.
Si les 2 plans sont
1) parall`eles et distincts, l’ensemble des solutions est vide.
2) parall`eles et confondus, l’ensemble des solutions est l’ensemble des points du plan. Le
syst`eme est doublement ind´etermin´e.
3) s´ecants, l’ensemble des solutions est l’ensemble des points de la droite d’intersection. Le
syst`eme est simplement ind´etermin´e.
c) R´esoudre y+x+z= 1
y−x+ 2z= 0
L’ensemble des solutions est S=1 + z
2,1−3z
2, z:z∈R
5
 6
7
8
6
7
8
1
/
8
100%