ANGLES ORIENTÉS

Chapitre 04 Angles orientés - Trigonométrie Première S
ANGLES ORIENTÉS - TRIGONOMETRIE
I- Mesure d’un angle en radians
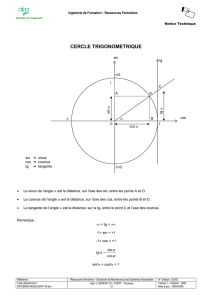
Soit O,A,Btrois points du plan distincts deux à deux. On considère le cercle de centre
Oet de rayon 1.
C
O
A
B
A′
B′
Définition
La mesure en radians de l’angle
’
AOB est la longueur de l’arc que l’angle intercepte sur
le cercle.
Sur la figure ci-dessus, la mesure en radians de l’angle
’
AOB est la longueur de l’arc
˘
A′B′.
Propriété
La mesure en radians est proportionnelle à la mesure en degré.
Valeurs remarquables
Le demi-pérmètre du cercle est π, c’est la mesure d’un angle plat.
mesure en degrés 0◦30◦45◦60◦90◦180◦
mesure en radians 0 π
6
π
4
π
3
π
2π
II- Mesures d’un angle orienté de vecteurs
1. Angle orienté de vecteurs non nul
Définition
Soit −→
uet −→
vdeux vecteurs non nuls du plan.
L’angle orienté des vecteurs −→
uet −→
vest le couple (−→
u , −→
v).
2. Mesures
Le plan est muni d’un repère orthonormé direct (O;−→
i , −→
j), Cest le cercle trigonomé-
trique de centre O(cercle de rayon 1 orienté dans le sens direct).
1

Chapitre 04 Angles orientés - Trigonométrie Première S
Soit −→
uet −→
vdeux vecteurs non nuls du plan.
Soit Ale point du plan tel que −→
OA =−→
uet Ble point tel que −−→
OB =−→
v.
La demi droite [OA) coupe Cen A′et la demi-droite [OB) coupe Cen B′.
+
~
i
~
j
α
~u
~v
O
A
BA′
B′
Une mesure αde (−→
u , −→
v) est la longueur d’un trajet de A′àB′sur le cercle C, affecté
d’un signe + si le sens du parcours est le sens direct, d’un signe −si le sens du parcours
est le sens indirect.
Propriété
Si αest une mesure de l’angle orienté (−→
u , −→
v), alors l’ensemble des mesures de (−→
u , −→
v)
est l’ensemble des nombres α+k×2π, où k∈Z.
On note (−→
u , −→
v) = α+k×2π,k∈Z.
On peut trouver quelquefois seulement (−→
u , −→
v) = α; se méfier de cette deuxième
écriture qui peut aboutir à des contradictions : π
6et 13π
6sont deux mesures d’un
même angle orienté de vecteurs mais π
66=13π
6. Cette écriture est donc à éviter.
Remarque On note de la même manière l’angle orienté, objet géométrique, et une
mesure de cet angle qui est un nombre réel.
3. Mesure principale
Définition −→
uet −→
vétant deux vecteurs non nuls du plan, il existe une unique mesure
de l’angle orienté (−→
u , −→
v) appartenant à l’intervalle ] −π;π], cette mesure est appelée
mesure principale de l’angle (−→
u , −→
v).
Cette mesure correspond au trajet le plus court de A′àB′sur le cercle.
Exemple Soit deux vecteurs non nuls −→
uet −→
vtels que (−→
u , −→
v) = −23π
6+k×2π,k∈Z.
Déterminer la mesure principale αde (−→
u , −→
v).
2

Chapitre 04 Angles orientés - Trigonométrie Première S
α=−23π
6+k×2π,k∈Zet −π < α 6π.
On résout : −π < −23π
6+k×2π6π.
−π < −23π
6+k×2π6π⇔ −π+23π
6< k ×2π6π+23π
6
⇔17π
6< k ×2π629π
6
⇔17
12 < k 629
12
Comme k∈Z, on a k= 2.
La mesure principale de (−→
u , −→
v) est donc α=−23π
6+ 2 ×2π=π
6.
4. Propriétés
Propriété 1 (condition d’orthogonalité)
Deux vecteurs −→
uet −→
vnon nuls sont orthogonaux si et seulement si (−→
u , −→
v) = π
2+
k×2πou −π
2+k×2π,k∈Z.
Propriété 2
Soit Aet Bdeux points distincts du plan. L’ensemble des points Mdu plan tels que
(−−→
MA, −−→
MB) = π
2+k×2πou −π
2+k×2πest le cercle de diamètre [AB] privé des
points Aet B.
Propriété 3 (condition de colinéarité)
Deux vecteurs −→
uet −→
vnon nuls sont colinéaires si et seulement si (−→
u , −→
v) = 0 + k×2π
ou π+k×2π,k∈Z.
Propriété 4
Soit Aet Bdeux points distincts du plan. L’ensemble des points Mdu plan tels que
(−−→
MA, −−→
MB) = 0 + k×2πou π+k×2πest la droite (AB) privée des points Aet B.
Propriété 5 (relation de Chasles)
Pour tous vecteurs −→
u,−→
vet −→
wnon nuls du plan, (−→
u , −→
v) + (−→
v , −→
w) = (−→
u , −→
w) + k×2π.
Propriété 6
Pour tous vecteurs −→
uet −→
vnon nuls :
•(−→
v , −→
u) = −(−→
u , −→
v) + k×2π,k∈Z.
•(−→
−u, −→
−v) = (−→
u , −→
v) + k×2π,k∈Z. (angles opposés par le sommet)
•(−−→
u , −→
v) = (−→
u , −→
v) + π+k×2π,k∈Z.(angles supplémentaires)
•(−→
u , −−→
v) = (−→
u , −→
v) + π+k×2π,k∈Z. (angles supplémentaires)
Démonstration On utilise la relation de Chasles
•(−→
u , −→
v) + (−→
v , −→
u) = (−→
u , −→
u) + k×2π
= 0 + k×2π.
Donc (−→
v , −→
u) = −(−→
u , −→
v) + k×2π,k∈Z.
•(−→
−u, −→
−v) = (−→
−u, −→
u) + (−→
u , −→
v) + (−→
v , −→
−v) + k×2π
=π+ (−→
u , −→
v) + π+k×2π
= (−→
u , −→
v) + k×2π
3

Chapitre 04 Angles orientés - Trigonométrie Première S
de même pour les deux derniers cas (à traiter en exercice)
Remarque
Pour tous vecteurs ~u et ~v non nuls et pour tous réels aet bstrictement positifs, on a :
(a~u, b~v) = (~u, ~v) + k×2π, k ∈Z.
Exemple Somme des angles orientés d’un triangle
Soit un triangle ABC, alors :
(−−→
AB, −→
AC) + (−−→
BC, −−→
BA) + (−→
CA, −−→
CB) = π+k×2π,k∈Z.
Démonstration
(−−→
AB, −→
AC) + (−−→
BC, −−→
BA) + (−→
CA, −−→
CB) = (−−→
AB, −→
AC) + (−−→
CB, −−→
AB) + (−→
AC, −−→
BC) + k×2π,k∈Z
= (−−→
CB, −−→
AB) + (−−→
AB, −→
AC) + (−→
AC, −−→
BC) + k×2π,k∈Z
= (−−→
CB, −−→
AB) + k×2π,k∈Z
=π+k×2π,k∈Z
5. Angle orienté et angle géométrique
Propriété
Soit O,Met Ntrois points du plan distincts deux à deux. Si αest la mesure principale
de l’angle orienté (−−→
OM , −−→
ON ), alors la mesure en radians de l’angle géométrique
÷
MON
est α.
La mesure en radians d’un angle géométrique est comprise entre 0 et π.
III- Sinus et cosinus
1. Enroulement d’une droite autour d’un cercle trigonométrique
Dans le plan muni d’un repère orthonormé direct (O;−→
i , −→
j), on considère le cercle
trigonométrique C.
Soit Ale point tel que −→
OA =−→
iet dla droite perpendiculaire en Aà l’axe des abscisses,
munie du repère (A;−→
j).
4

Chapitre 04 Angles orientés - Trigonométrie Première S
~
i
~
j
~
~
j
C
+
O
A
M
N
En enroulant cette droite autour du cercle, on associe à chaque point Mde la droite
dun unique point Ndu cercle C.
La longueur du chemin de AàNsur le cercle Cest égale à la distance AM , on parcourt
le cercle dans le sens direct si Ma une abscisse positive dans le repère (A;−→
j), dans
le sens indirect si Ma une abscisse négative.
On associe ainsi à chaque nombre réel un unique point du cercle C.
Réciproquement, si un point Ndu cercle est associé à un réel x, alors l’ensemble des
réels auxquels est associé le point Nest l’ensemble des réels x+k×2π, où kest un
entier relatif.
Exemples
Soit le point Mdu cercle associé au nombre −π
4.
Alors les nombres −π
4+ 2π=7π
4,−π
4−3×2π=−25π
4sont également associés au
point Mdu cercle.
2. Sinus et cosinus d’un nombre réel
Le plan est muni d’un repère orthonormé direct (O;−→
i , −→
j), Cest le cercle trigonomé-
trique de centre O.
Soit xun nombre réel et Mle point de Cassocié au nombre x.
Définition Le cosinus de x, noté cos x, est l’abscisse de Mdans le repère (O;−→
i , −→
j).
Le sinus de x, noté sin x, est l’ordonnée de Mdans le repère (O;−→
i , −→
j).
5
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%