MEMS : MicroElectroMechanical Systems Applications

MEMS : MicroElectroMechanical Systems
Applications : Acceléromètre et Gyroscope
Arnaud Douceur
Xavier Jean
Fernando Granha
30 mars 2010
1 Introduction aux MEMSs
1.1 Caractéristiques d’un MEMS
Un MicroElectroMechanical System exploite une technologie très fine. En effet, les MEMSs sont
formés de composants dont la taille est comprise entre 1 et 100 micromètres, pour former des objets
dont les dimensions se situent entre 10 micromètre et 1 millimètre. En général, ils sont formés d’un
microprocesseur qui traite les données et d’une multitude de microcapteurs pour les recueillir. L’étude
de leur fonctionnement est assez complexe, dans la mesure où, à cette échelle, tout n’obéit pas au lois de
la physique classique.
1.2 À quoi ressemble un MEMS ?
Fig. 1 – Un Mems, mesurant 300 micromètres de longueur, mis au point par l’équipe suisse ETH Zurich
qui a participé à la RoboCup 2009. c
ETH Zurich
1.3 Naissance des MEMSs
Même si leur concept date des années 1960, la technologie n’a permis leur réalisation que beaucoup
plus tard. En effet, c’est les nombreux progrès techniques réalisés pour l’industrie du semiconducteur qui
1

ont permis, en utilisant des techniques et des processus de fabrication dérivés, de produire les premiers
MEMSs.
1.4 Quel avenir pour les MEMSs ?
Le marché du MEMS est en plein essor. Par exemple, tous les capteurs pour le déclenchement des
airbags de voiture exploitent la technologie MEMS. Selon "Global MEMS/Microsystems Markets and
Opportunities" le marché aurait pesé 40 milliards de dollars en 2006. Selon une étude prospective de
"SEMI and Yole Developpement", ce marché atteindrait 72 milliards de dollars en 2011.
1.5 Différents types de MEMSs
Les MEMSs servent essentiellement à faire des capteurs. Voici quelques applications pratiques de la
technologie MEMS :
– Têtes d’impression des imprimantes jet d’encre
– Accéléromètre
– Gyroscopes
– Capteurs de pression
– Pilotage de micromirroirs sur vidéoprojecteur
– Commutation optique pour les télécommunications
– Biocapteur, chémorecepteurs.
Dans la suite de ce document, nous nous intéresserons plus en profondeur aux accéléromètres et
gyroscopes, qui nous sont tout particulièrement utiles dans notre domaine d’étude.
2 Les accéléromètres
Le principe d’un accéléromètre peut être résumé de la manière suivante : une accélération entraine
le déplacement ou la déformation d’un objet, que l’on va mesurer, en connaissant la relation entre ce
déplacement ou cette déformation et l’accélération.
Dans cette section, nous aborderons ces différents points évoqués dans cette définition. Nous abor-
derons également quelques points sur les caractéristiques techniques pertinentes pour décrire les ac-
céléromètres.
2.1 Quelques types d’accéléromètres répandus
Nous commençons par les accéléromètres de base, les plus simples. Les types d’accéléromètres les plus
répandus sont les accéléromètres à jauge de contrainte, que nous verrons ensuite. Nous verrons également
les accéléromètres basés sur l’effet piezzo-électrique. Pour une liste exhaustive des types d’accéléromètres,
nous vous invitons à suivre ce lien.
2.1.1 Les accéléromètres de base
Les accéléromètres de base sont basés sur le principe fondamental de la dynamique F=ma, où F
est la somme des forces appliquées à une masse mappelée masse séismique mobile, aest l’accélération à
laquelle est soumis m. On va mesurer le déplacement de mdû à une accélération en reliant mau solide
de référence, qui est fixe, par un ressort dont on connait bien la constante de raideur. On peut mesurer
l’élongation du ressort en l’attachant à une résistance variable, ce qui permet d’avoir directement en
sortie une tension proportionnelle à l’élongation du ressort, et donc à l’accélération.
2.1.2 Les accéléromètres à jauge de contrainte
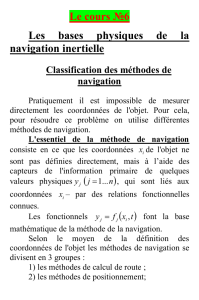
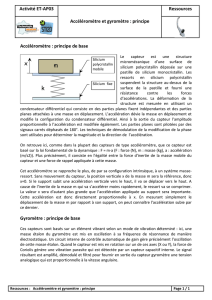
Ce sont les accéléromètres les plus répandus. L’idée est d’avoir un circuit qui se déforme facilement,
et qui oppose une résistance variable avec la déformation de ce circuit, comme le montre la figure 2. Pour
la jauge de déformation, on prend habituellement de l’acier E4340 ou de l’acier inoxydable, mais on peut
prendre aussi de l’aluminium.
2

Fig. 2 – Schéma de principe d’une jauge de contrainte (source : Wikipédia)
2.1.3 Les accéléromètres à effet piezzo-électrique
Les accéléromètres basés sur l’effet piezzo-électrique sont en général des accéléromètres à quartz. On
prend une lame de quartz qui vibre à une certaine fréquence et qui va se déformer. L’effet piezzo-électrique
se manifeste lorsqu’un objet se charge électriquement quand il subit une déformation, et réciproquement.
Dans le cas des accéléromètres à quartz, la fréquence de résonance change, et c’est ce que l’on veut
mesurer.
2.2 Caractéristiques des accéléromètres
Les caractéristiques principales d’un accéléromètre sont les suivantes (en partie tirées de Wikipédia) :
L’étendue de mesure : C’est l’accélération maximale que l’on peut mesurer sur chacun des axes.
A prendre en compte également le nombre d’axes (de 1 à 3).
L’électronique intégrée : Certains accéléromètres proposent une sortie numérique.
L’accélération à ne jamais dépasser : Il s’agit de la valeur d’accélération au dela de laquelle on
considère que les déformations plastiques du matériau qui se déforme sont non négligeables par rapport
aux déformations élastiques. Lors d’un choc, l’accélération subie peut monter à 1000g.
La bande passante : De nombreux accéléromètres renvoient un signal numérique qui est donc
échantillonné. Il permet donc de reproduire correctement un signal compris dans une bande de fréquence
donnée. Un ordre de grandeur pour de nombreux accéléromètres est 1kHz. Pour des cas d’utilisation
comme l’étude de vibrations, cette caractéristique est très importante.
La sensibilité : Elle correspond à la différence des signaux de sortie (numériques) pour une différence
d’accélération de 1g.
Le niveau zéro-g : C’est l’accélération mesurée lorsque l’accéléromètre n’est soumis à aucune ac-
célération. En général, on mesure 0g sur les axes X et Y, et 1g sur l’axe Z. A cela on y ajoute le bruit
que l’on peut rencontrer. Sur les accéléromètres le bruit est de moyenne nulle, et souvent on l’assimile à
3

un bruit blanc.
La sensibilité transversale : Cela correspond à la déviation entre les axes X,Y,Z vus par l’ac-
céléromètre et les axes X,Y,Z réels (à distinguer de l’angle d’incidence, qui correspond à un déplacement
de l’accéléromètre par rapport à un référentiel). Cela est à prendre en compte par exemple lorsque la
verticale varie (par exemple pour les avions de ligne).
Le prix : d’après Wikipédia en 2007, il varie entre 6 euros pour un accéléromètre bas de gamme non
asservi, jusqu’à 3000 euros pour un accéléromètre haut de gamme. Actuellement on en trouve autour de
4 euros sur radiospare.
3 Gyromètre
Le gyromètre cherche à mesurer la vitesse angulaire. Un tel capteur en MEMS utilise une structure
de quartz vibrant qui est sensible aux rotations grâce à la force de Coriolis. Normalement, il y a deux
masses qui vibrent en opposition de phase sur un certain axe, dans la littérature cet axe est connu comme
“drive axe”. Lorsque le capteur tourne, la force de Coriolis crée une vibration dans un axe orthogonal
à la vitesse linéaire du drive axe et à la vitesse angulaire ~
Ω. Étant proportionnelle à la vitesse ~
Ω, cette
vibration est la base pour le calcul. Ce nouveau axe est appelé “sense axe”.
Du point de vue électrique, les matériaux qui ont des propriété piézoélectrique sont utiles pour génèrer
la vibration du drive axe ou pour la mesure dans le sense axis. Il existe des materiux qui peuvent générer
une différence de potentiel lors une compression. Toutefois, la vibration du drive axe pourrait être créée
par une courant alterné dans un champ magnétique, Force de Lorentz [1] par exemple.
La force de Coriolis est le composant dynamique de la force inertielle, car son existence dépend d’une
vitesse linéaire, tandis que l’autre composante, la force centrifuge, est toujours là. En fait, ces forces
n’existent pas, elles sont des abstractions de l’inertie vues dans référentiel qui tourne. Pour clarifier un
peu le principe physique derrière la majorité de ce capteur, voici la formule 1.
~
FCoriolis =−2m~
Ω(t)×~v (1)
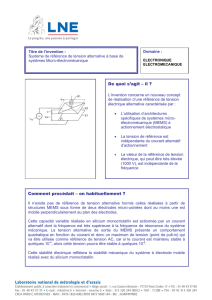
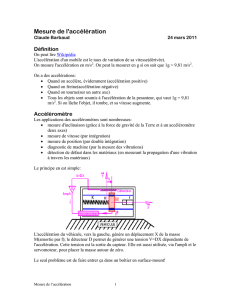
En résumé le gyromètre peut être modélisé comme un système masse-ressort avec frottement (3). En
pratique les deux axes sont couplés à cause de l’inertie et de l’élasticité de masse. Cette couplage est
responsable du transfert d’énergie du drive axe au sense axe, ce qui évidemment résulte d’une erreur de
lecture. Un système d’asservissement pour retirer la vibration de l’axe, quand il n’y a pas de rotation,
peut être intéressant pour minimiser l’erreur d’imperfection du processus de fabrication.
m¨x+dxx ˙x+dxy ˙y+ (kxx −m(Ω2
y+ Ω2
x))x+ (kxy +mΩyΩx)y=fx+ 2mΩz2y(2)
m¨y+dxy ˙x+dyy ˙y+ (kyy −m(Ω2
x+ Ω2
z))y+ (kxy +mΩxΩy)x=fy−2mΩz2x(3)
Comme ce type de capteur se base sur les vibrations, il faut faire attention à la température et aux
vibrations mécaniques (e.g. provenant d’un moteur). Placer le composant loin d’un moteur ou retirer de
la mesure la partie correspondant au changement de température quand ce dernier est conséquente sont
importants pour avoir un valeur plus réaliste. Sachant que le signal de sortie est la combinaison d’une
droite avec un bruit souvent modélisé par un bruit blanc, on retire le facteur dû à la droite, puis on fait
le filtrage qui est aussi d’une grande importance. Dans la littérature, il y a de nombreux exemples de
filtres de Kalman comme dans la reference [3].
4 Conclusion
Nous avons vu au fil de cet article une introduction à la technologie MEMS et aux deux applications
que sont le gyroscope et l’accéléromètre. Les capteurs, ainsi toujours plus petit et toujours moins coûteux
voient leur champ d’application devenir de plus en plus vaste.
Ainsi, la Nintendo Wii et l’iPhone possèdent un petit accéléromètre, qui donnent une nouvelle di-
mension à l’interaction entre l’Homme et la machine. Sans les technologies MEMS, ça n’aurait pas été
4

Fig. 3 – Système masse-ressort avec frottement de [2]
possible. On peut donc envisager que ce type de capteurs va petit à petit s’infiltrer dans des objets de
plus en plus communs, et seront de plus en plus nombreux, afin de traiter toutes sortes de données.
Références
[1] Paoletti, F. ; Gretillat, M.-A. ; de Rooij, N.F. A silicon micromachined vibrating gyroscope with
piezoresistive detection and electromagnetic excitation, IEEE (Février 11-15, 1996).
[2] Izadian, A. ; Dawson, J. ; Famouri, P. Input-output synchronization for bias drift reduction of MEMS
gyroscopes, IEEE (Juin 11-13, 2008).
[3] Yang PeiPei ; Li Qing. Kalman filtering of MEMS gyro based on time-series model, IEEE (Août
16-19, 2009).
[4] Wikipedia Force de Coriolis, http ://fr.wikipedia.org/wiki/Force_de_coriolis
[5] Onera Capteurs Inertiels, http ://www.onera.fr/dmph/capteurs-inertiels/index.php
[6] ST Microelectronics MEMS motion sensors, http ://www.st.com/stonline/products/promlit/pdf/brmems1009.pdf
5
1
/
5
100%