Applications linéaires I Définitions et exemples

Applications linéaires
I Définitions et exemples 1
I.A Définition d’une application linéaire . . . . . . . . . . . . . . . . 1
I.B Composée de deux applications linéaires . . . . . . . . . . . . . . 3
I.C Noyau et image d’une application linéaire . . . . . . . . . . . . . 4
I.D Projecteurs et symétries . . . . . . . . . . . . . . . . . . . . . . . 5
I.D.1 Projecteurs .......................... 5
I.D.2 Symétries ........................... 6
II Applications linéaires en dimension finie 7
II.A Le théoréme fondamental . . . . . . . . . . . . . . . . . . . . . . 7
II.B Isomorphismes entre espaces vectoriels de dimension finie . . . . 10
II.C Théorème du rang et conséquences . . . . . . . . . . . . . . . . . 11
II.D Rang d’une application linéaire . . . . . . . . . . . . . . . . . . . 12
II.E Noyau d’une forme linéaire, hyperplans . . . . . . . . . . . . . . . 13
I Définitions et exemples
I.A Définition d’une application linéaire
Définition 1. Soient Eet Fdeux K-espaces vectoriels et f:E→Fune
application. On dit que fest une application linéaire de Edans Fsi :
∀~u, ~v ∈E, ∀λ, µ ∈Kon a f(λ~u +µ~v) = λf(~u) + µf(~v)
On note LK(E, F )l’ensemble des applications linéaires de Edans F. (noté aussi
L(E, F ))
Remarque 1. Si fest une application linéaire, on déduit assez facilement de
la définition ci-dessus les propriétés suivantes :
1. fest linéaire si et seulement si ∀λ∈R,∀~u, ~v ∈E:
f(λ~u) = λf(~u)
f(~u +~v) = f(~u) + f(~v)
2. f(~
0E) = ~
0F.
3. ∀λ1, λ2, . . . , λn∈K,∀~u1, ~u2, . . . , ~un∈E:
f(
n
X
i=1
λi~ui) =
n
X
k=1
λif(~ui)
Définition 2. Une application linéaire de Edans Eest appelée endomorphisme
de E. L’ensemble des endomorphismes de Ese note :
LK(E, E) = LK(E) = L(E)
1

Définition 3.
– Une application linéaire bijective de Edans Fest appelée isomorphisme
de Esur F.Eet Fsont dits isomorphes s’il existe un isomorphisme de
Esur F. On note alors E∼F.
– Un endomorphisme bijectif de Eest appelé automorphisme de E.
Exemples 1. Voici quelques exemples usuels d’applications linéaires dans un
K-ev Equelconque :
1. f:E→F
~u 7→ ~
0F
est une application linéaire.
2. Si α∈K, alors f:E→E
~u 7→ α~u est un endomorphisme de E appelé
homothétie vectorielle de rapport α.
En particulier, IdE:E→E
~u 7→ ~u est une application linéaire.
Exemples 2 (Autres exemples).
1. Dans le R-espace vectoriel R:
f:R→R
x7→ 2xest linéaire alors que g:R→R
x7→ sin xne l’est pas.
2. Dans le K-espace vectoriel K[X]:
Φ : K[X]→K[X]
P7→ P0est linéaire.
3. Toute isométrie vectorielle du plan, comme par exemple une rotation vec-
torielle (voir chapitre géométrie du plan), est une application linéaire.
Démonstration.
1. ∀x, y ∈R,∀λ, µ ∈R,ona:
f(λx +µy) = 2(λx +µy) = λ(2x) + µ(2y) = λf (x) + µf(y)
En revanche, g(π
2+π
2) = sin( π
2+π
2) = sin π= 0
g(π
2) + g(π
2) = sin π
2+ sin π
2= 2 6=g(π
2+π
2)
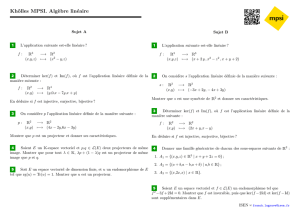
Exercice 1. Les applications suivantes sont-elles linéaires ? Justifier.
a)f:R→R
x7→ 2x2b)g:R→R
x7→ 4x−3
c)h:R→R
x7→ |x|d)i:R2→R2
(x, y)7→ (y, x)
f)j:R2→R
(x, y)7→ xy e)k:R2→R3
(x, y)7→ (2x, x +y, 2y)
2

Proposition 1. LK(E, F )est un K-espace vectoriel, d’élément neutre l’appli-
cation nulle de Edans F(~u 7→ ~
0F), pour les lois usuelles +et .définies pour
les applications.
Définition 4. Si F=K,f∈ L(E, K)est appelée forme linéaire de E(sur K).
Exemples 3.
1. Φ : R2→R
(x, y)7→ xest une forme linéaire de R2
2. Ψ : K[X]→K
P7→ P(1) est une forme linéaire de K[X].
I.B Composée de deux applications linéaires
Proposition 2. La composée de deux applications linéaires est une application
linéaire.
Démonstration. Soient f:E→Fet g:F→Gdeux applications linéaires. Si λ, µ ∈Ket
~u, ~v ∈E,ona:
(g◦f)(λ~u +µ~v) = g[f(λ~u +µ~v)] = g[λf (~u) + µf(~v)] (car f est linéaire)
=λg[f(~u)] + µg[f(~v)] (car g est linéaire)
(g◦f)(λ~u +µ~v) = λ(g◦f)(~u) + µ(g◦f)(~v)
Conséquence : La composée de deux endomorphismes de Eest un endomor-
phisme de E.
Proposition 3. Si f:E→Fest un isomorphisme, alors f−1:F→Eest
aussi une application linéaire (donc un isomorphisme).
Démonstration. Soit f:E→Fun isomorphisme. Si λ, µ ∈Ket ~u0, ~v0∈F, a-t-on :
f−1(λ~u0+µ~v0) = λf−1(~u0) + µf −1(~v0)?
On sait qu’il existe ~u, ~v ∈E tels que ~u0=f(~u)et ~v0=f(~v)(car fest surjective). Donc :
f−1(λ~u0+µ~v0) = f−1(λf(~u) + µf (~v)) = f−1[f(λ~u +µ~v)] car f est linéaire.
D’où, avec la relation f−1◦f=IdE:
f−1(λ~u0+µ~v0) = λ~u +µ~v =λf −1(~u0) + µf −1(~v0)
Définition 5. On note GL(E)l’ensemble des automorphismes de E. (GL(E),◦)
est un groupe (non commutatif) appelé groupe linéaire de E(d’élément neutre
IdE).
Remarque 2. L’ensemble des homothéties de rapport non nul (applications
~u 7→ α~u avec α6= 0) forme un sous-groupe de GL(E).
3

I.C Noyau et image d’une application linéaire
Définition 6. Soit f∈ L(E, F ).
1. On appelle noyau de f, l’ensemble noté :
Ker f=f−1({~
0F}) = {~u ∈E/ f(~u) = ~
0F}
2. On appelle image de f, l’ensemble noté :
Im f=f(E) = {~v ∈F/ ∃~u ∈E, ~v =f(~u)}
Exemples 4 (Exemples généraux).
1. Soit f∈ L(E, F ). Si fest l’application nulle, alors Ker f=Eet Im f={~
0F}.
2. Soit f∈ L(E). Si f=IdE, alors Ker f={~
0E}et Im f=E.
Proposition 4. Si f∈ L(E, F ), alors Ker f(resp Im f) est un sous-espace
vectoriel de E(resp. de F).
Démonstration. Exercice
Exemple 5. {(x, y, z)∈R3/ x + 2y+z= 0}est un s.e.v. de R3car il s’agit
du noyau de la forme linéaire Φ:(x, y, z)7→ x+ 2y+z.
Proposition 5. Soient E, F deux K-e.v. et f∈ L(E, F ), alors :
(i) fest injective si et seulement si Ker f={~
0E}.
(ii) fest surjective si et seulement si Im f=F.
Démonstration.
(i) (⇒) Supposons finjective. Cherchons Ker f.
Si ~u ∈Ker falors f(~u) = f(~
0), donc ~u =~
0(car f est injective). En conclusion, on a
Ker f={~
0}.
(⇐) Supposons Ker f={~
0}. Montrons que fest injective. Soient ~u et ~v ∈Etels que
f(~u) = f(~v), alors f(~u)−f(~v) = 0 = f(~u −~v). D’où ~u −~v ∈Ker f, ce qui montre
~u −~v = 0 et ~u =~v. Donc fest injective.
(ii) Évident.
Exemple 6. Φ : R3→R
(x, y, z)7→ x+ 2y+zest surjective car ∀α∈R, on a
α= Φ((α, 0,0)), et non injective car Φ((1,0,−1)) = (0,0,0) par exemple.
Exercice 2.
1. Montrer que l’application linéaire Φ : K[X]→K[X]
P7→ P0est surjective
et non injective.
4

2. Montrer que l’application Ψ : K[X]→K[X]
P7→ XP est linéaire, injective
et non surjective.
Solution.
1. Si P=
n
X
k=0
akXkalors P= Φ n
X
k=0
ak
k+ 1 Xk+1!donc Φest surjective. De plus,
Φ(1) = 0 donc Φn’est pas injective.
2. ∀P, Q ∈K[X],∀λ, µ ∈K,ona:
Ψ(λP +µQ) = X(λP +µQ) = λXP +µXQ =λΨ(P) + µΨ(Q)
donc Ψest linéaire. De plus :
Ψ(P)=0⇒XP = 0 ⇒P= 0
Donc Ψest injective, mais Ψn’est pas surjective car le polynôme Q= 1, par exemple,
n’a pas d’antécédent par Ψ(∀P∈K[X], on a XP = 1 ⇒X|1ce qui est absurde,
donc Qne peut être image de Ppar Ψ).
Exercice 3. Montrer que les applications suivantes sont des automorphismes :
a)f:R2→R2
(x, y)7→ (x+y, x −y)b)g:R[X]→R[X]
P7→ P+P0
I.D Projecteurs et symétries
I.D.1 Projecteurs
Définition 7. Soient Fet Gdeux s.e.v. supplémentaires de E.
i.e. ∀~u ∈E, ∃!(~u1, ~u2)∈F×Gtel que ~u =~u1+~u2
On appelle projection sur Fparallèlement à G(ou projecteur) l’application :
p:E→E
~u 7→ ~u1
~u2
~u1=p(~u)
~u
F
G
Projection sur Fparallèlement à G
Remarques 3.
1. Un projecteur est un endomorphisme de E.
5
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%