∑ f =m a

G.P. Questions de cours mécanique du point
Changement de référentiels:
Un point
M
de coordonnées
xt, y t, z=0
se déplace dans le référentiel
R
. de
repère d'espace
O , ux,uy,uz
. Ce référentiel non galiléen tourne à la vitesse constante
= uz
autour de l'axe
O0z
par rapport à un référentiel galiléen
R
0
de repère
d'espace
O0, ux0 ,uy0 ,uz
.
O
reste à distance constante
HO=a
de l'axe
O0z
.
Rappeler, en justifiant rapidement, l'écriture du principe fondamental dans le cas d'un
référentiel non galiléen.
L'écrire ici dans le cadre de la situation proposée.
Réponse:
Le principe fondamental dans le référentiel galiléen
Dans
R
0
galiléen, on écrit:
∑
f=ma
a
désigne l'accélération de
M
par rapport au référentiel choisi. Ici
R
0
.
Le principe fondamental dans le référentiel non galiléen
On développe l'écriture précédente en utilisant la loi de composition des accélérations (non
redémontrée ici):
aM/
R
0=aM/
R
aM∈
R
/
R
02
R
/
R
0∧vM/
R
parfois écrite:
a' absolue ' =
a' relative'
aentrainement
aCoriolis
∑
f=ma' relative 'aentrainement aCoriolis
∑
f−maentrainement−maCoriolis=ma' relative '
On pose
fi , e =−maentrainement
On pose
fi , c=−maCoriolis
∑
f
fi ,e
fi ,c=ma' relative'
On se place ici du point de vue du référentiel
R
.
On désigne par
a
l'accélération de
M
par rapport au référentiel choisi. Ici
R
. Idem pour
v
qui désigne maintenant la vitesse de
M
par rapport au référentiel.
∑
f
fi ,e
fi ,c=ma
On peut donc appliquer le principe fondamental dans un référentiel non galiléen
R
à condition
d'ajouter deux forces d'inertie:

G.P. Questions de cours mécanique du point
1) la force d'inertie d'entrainement
fi , e=−maentrainement=−maM∈
R
/
R
0
2) la force d'inertie de Coriolis
fi , c=−maCoriolis=−2m
R
/
R
0∧v
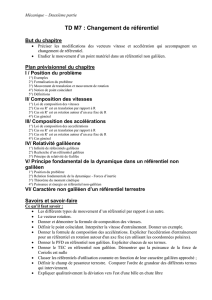
Schéma de la situation proposée:
Couleurs:
Le point
M
(rouge) se déplace par rapport à
R
(vert) : mouvement « relatif »
Le point
M
(rouge) se déplace par rapport à
R
0
(noir) : mouvement « absolu »
Le point de
R
coïncidant avec
M
(point vert placé en
M
) est fixe par rapport à
R
(vert)
mais se déplace par rapport à
R
0
(noir) : mouvement d'entrainement. Le point
M
est ici
considéré comme un point du « solide »
R
(vert).
Entrainement:
On étudie le mouvement du point coïncidant
M∈
R
: mouvement circulaire de rayon
HM
.
Il est plus facile de faire appel à la cinématique du solide. On utilise les formules donnant la vitesse
et l'accélération d'un point d'un solide (formules rencontrées en cinématique en sup dans le cours de
SI et dans le cours de physique concernant la composition de mouvement).
•Vitesse:
O
et
M∈
R
sont deux points de
R
donc formule de base:
vM∈
R
/
R
0=
vO/
R
0
MO∧
R
/
R
0
ou
a
x
y
O
M
H

G.P. Questions de cours mécanique du point
vM∈
R
/
R
0=
vO/
R
0
R
/
R
0∧
OM
de plus
O
décrit un mouvement circulaire de centre
H
:
vO/
R
0=
R
/
R
0∧
H O
finalement
vM∈
R
/
R
0= ∧
H M
(prévisible puisque
M∈
R
décrit un mouvement circulaire de centre
H
. On pouvait
considérer dès le départ que
H
était aussi un point du solide
R
)
•accélération
Ici
d
dt =
0
donc :
aM∈
R
/
R
0=aO/
R
0
R
/
R
0∧
d
OM
dt
/
R
0
aM∈
R
/
R
0=
aO/
R
0
∧
∧
OM
En utilisant le point
H
au lieu de
O
, on obtient plus rapidement:
aM∈
R
/
R
0= ∧
∧
HM
L'accélération est normale centripète.
aM∈
R
/
R
0=− 2
HM
•force d'inertie d'entrainement
C'est la force centrifuge:
fi , e =m2
HM
(formule connue)
fi , e=m2
HO
OM
fi , e=m2axt uxyt uy
Vitesse et accélération dans le référentiel d'étude ( cf « mouvement relatif »):
Vitesse:
vM/
R
=
d
OM
dt
/
R
v= ˚xt
ux ˚yt
uy
Accélération:
aM/
R
=
dvM/
R
dt
/
R

G.P. Questions de cours mécanique du point
aM= ¨
xt
ux¨
yt
uy
Coriolis:
fi , c=−2m
R
/
R
0∧v
fi , c=−2mentrainement ∧vrelatif
fi , c =2m ˚yt ux− ˚xt uy
Principe fondamental dans le référentiel tournant:
En désignant par
∑
f
les forces autres que les forces d'inertie:
∑
f
fi ,e
fi ,c=ma
∑
fm2
HM −2m∧v=ma
en projection sur
Ox
:
∑fxm2axt 2m ˚yt = m¨
xt
en projection sur
Oy
:
∑fym2yt −2m ˚xt = m¨
yt
en projection sur
Oz
:
∑fz=0
1
/
4
100%