Chapitre 13 - Mathieu Mansuy

Projection orthogonale
Chapitre 13
1 Suppl´ementaire orthogonal 2
1.1 D´efinition .................... 2
1.2 Suppl´ementaire orthogonal . . . . . . . . . . 3
2 Projection orthogonale sur un sous-espace
vectoriel de dimension finie 5
2.1 Projet´e orthogonal . . . . . . . . . . . . . . . 5
2.2 Expression dans une base orthonorm´ee de F. 6
2.3 Distance d’un vecteur `a un sous-espace . . . . 8
2.4 Pseudo-solutions d’un syst`eme lin´eaire . . . . 9
Mathieu Mansuy - Professeur de Math´ematiques en sp´eciale ECS au Lyc´ee Louis Pergaud (Besan¸con)

ECS2 Lyc´ee Louis Pergaud
1 Suppl´ementaire orthogonal
Dans tout ce chapitre, Ed´esigne un espace euclidien de dimension n≥1, dont on note <·,·>le
produit scalaire, et k·k la norme euclidienne associ´ee.
1.1 D´efinition
D´efinition.
Soit Fun sous-espace vectoriel de E. On appelle orthogonal de F, et on note F⊥, l’ensemble des
vecteurs orthogonaux `a F, c’est `a dire :
F⊥={x∈E, ∀y∈F, < x, y >= 0}.
Soient F, G des sous-espaces vectoriels de E.
(1) F⊥est un sous-espace vectoriel de Eorthogonal `a F.
(2) Si Gest orthogonal `a F, alors G⊂F⊥.
(3) Si F⊂G, alors G⊥⊂F⊥.
Propri´et´e 1
Preuve.
Exemple. {0E}⊥=Eet E⊥={0E}.
2

ECS2 Lyc´ee Louis Pergaud
Soit F=V ect(e1, . . . , en), alors
x∈F⊥⇔ ∀ i∈[|1, n|], < x, ei>= 0
Propri´et´e 2
Preuve.
Exercice. Dans R3muni du produit scalaire canonique, soit F={(x, y, z), x+y+z= 0}. D´eterminer
F⊥.
1.2 Suppl´ementaire orthogonal
Soit Fun sous-espace vectoriel de E. Alors dim(F⊥) = dim(E)−dim(F), et on a :
E=F⊕F⊥.
On dit que F⊥est le suppl´ementaire orthogonal de F.
Th´eor`eme 3
3

ECS2 Lyc´ee Louis Pergaud
Preuve.
Comme cons´equences, on a :
(1) F⊥⊥=F.
(2) La concat´enation d’une base orthonorm´ee (e1, . . . , ep) de Fet d’une base orthonorm´ee
(ep+1, . . . , en) de F⊥est une base orthonorm´ee de E.
Propri´et´e 4
Preuve.
Remarque. On peut d´efinir de mˆeme l’orthogonal d’un sous-espace vectoriel Fen dimension in-
finie. Cependant les propri´et´es ´enonc´ees dans ce paragraphe ne sont alors plus vraies : on n’a pas
n´ecessairement E=F⊕F⊥ou encore F=F⊥⊥lorsque Eest de dimension infinie.
4

ECS2 Lyc´ee Louis Pergaud
2 Projection orthogonale sur un sous-espace vectoriel de dimension
finie
2.1 Projet´e orthogonal
Soit Fun sous-espace vectoriel de E. on vient de voir qu’on a la somme direct :
E=F⊕F⊥.
D´efinition.
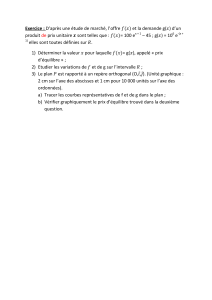
On appelle projection orthogonale sur F, not´ee pF, la projection sur Fdans la direction de F⊥.
Pour tout x∈E,pF(x) est appel´e le projet´e orthogonal de xsur F.
F
0E
F⊥
x
pF(x)
x−pF(x)
Projet´e orthogonal de xsur F.
Remarques.
Soit pun projecteur de E. Alors pest un projecteur orthogonal si et seulement si
Im(p)⊥Ker(p).
Le projet´e orthogonal pF(x) d’un vecteur xsur le sous-espace Fest caract´eris´e par :
(pF(x)∈F
x−pF(x)∈F⊥
IPour d´eterminer le projet´e orthogonal de xsur le sous-espace vectoriel F, on peut proc´eder ainsi :
(1) On d´etermine une base (e1, . . . , ep)de F;
(2) pF(x)∈F: il existe donc λ1, . . . , λp∈Rtels que pF(x) =
p
X
i=1
λiei.
(3) x−pF(x)∈F⊥: on a donc
< x −pF(x), e1>= 0
.
.
.
< x −pF(x), ep>= 0
(4) On r´esout alors ce syst`eme lin´eaire pour obtenir λ1, . . . , λp, et pF(x).
5
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%