Cours de physique de 4ième secondaire


Chapitre 1
L’étude des mouvements
1.1 Introduction
Le mot « physique » vient du grec « phusikê » qui signifie « nature ». La physique est
donc la science qui étudie les propriétés de la matière, de l’espace, du temps et
qui établit les lois qui rendent compte des phénomènes naturels. La grande variété des
phénomènes naturels impliqua leurs classements en plusieurs branches principales, no-
tamment : la Mécanique des solides, la Mécanique des fluides, la Thermodynamique,
l’Optique, l’Électromagnétisme, la Mécanique relativiste, la Théorie de la relativité gé-
nérale, la Mécanique quantique, la Physique des particules.
Le programme de la quatrième année comporte l’étude des chapitres suivants :
1. La cinématique
2. La dynamique
3. La gravitation universelle
4. Le principe de conservation de l’énergie
5. Les lois fondamentales de l’optique
Notre exploration du monde de la physique commencera donc par l’étude des mou-
vements qu’on appelle la « cinématique ». Cette discipline de la Mécanique étudie le
mouvement des corps, en faisant abstraction des causes du mouvement lui-même. Et
pour décrire un mouvement, il est nécessaire de mesurer des distances et des durées.
Alors, abordons les notions d’espace et de temps.
1.1.1 L’espace
Intuitivement, nous savons que nous vivons dans un espace à trois dimensions. Mar-
cher devant soi ou reculer, se déplacer à gauche ou à droite, monter ou descendre,
voilà les trois directions de base de l’espace. Donc, pour connaître la position d’un point
dans l’espace, il faut d’abord définir des axes de référence et ensuite mesurer ses co-
ordonnées sur les trois axes de référence. Pour réaliser ces mesures, nous disposons
d’un étalon ; c’est le « mètre ». Il est défini par la distance à 0°C, entre deux traits mar-
qués sur une barre de platine, déposée au Bureau International des poids et mesures,
1

CHAPITRE 1. L’ÉTUDE DES MOUVEMENTS 2
à Sèvre. Dans le but d’améliorer la précision des résultats expérimentaux dans le do-
maine de la recherche scientifique et des nouvelles technologies telles que le GPS, la
micro-informatique, la médecine, etc., la définition du mètre est maintenant formulée
comme étant la distance parcourue par la lumière en 1
299792458 s. Sachez également
que la vitesse de propagation de la lumière dans le vide est une « constante univer-
selle » valant : c= 299792458 m/s.
L’étude de notre Univers dont l’étendue va de l’infiniment petit à l’infiniment grand,
oblige souvent les physiciens à utiliser des unités multiples ou sous-multiples du mètre
mieux adaptées à leur domaine de recherche. Par exemple, un astronome utilisera l’année-
lumière pour indiquer que le centre de notre galaxie se trouve à 30.000 années-lumière
de la Terre. Par contre, un physicien atomiste utilisera l’ « Angström (Å) » valant 10−10
m parce que les atomes ont à peu près cette taille. Comme l’étendue de l’espace est très
grande, il serait assez pénible de tout exprimer en mètre.
Pour illustrer l’étendue de l’espace, je vous invite à consulter le tableau ci-dessous :
Année-lumière Mètre Description
15.109Limite de l’Univers
150.109Distance Soleil/Terre
1,8Hauteur d’un homme
10−8Un virus
10−10 Le rayon d’un atome
10−15 Le rayon d’un noyau atomique
Table 1.1 – Quelques chiffres illustrant une partie de l’étendue de l’espace
1.1.2 Le temps
Qu’elle est la définition du temps ? Dans le dictionnaire, on peut lire : « Notion fon-
damentale conçue comme un milieu infini dans lequel se succèdent les événements. » Bien en-
tendu, nous avons tous une idée du temps qui passe ; notre vie personnelle est jalonnée
d’événements tels que la naissance, le premier jouet, la première dent, le premier amour,
le mariage, etc... Nous nous contenterons de cette notion intuitive.
La plupart des méthodes de mesure des durées sont basées sur l’utilisation d’un phé-
nomène « périodique », c’est-à-dire un phénomène qui se répète le plus régulièrement
possible. Par exemple, les peuples pré-historiques ont considéré le jour comme un phé-
nomène périodique, donc comme un étalon du temps qui passe. L’homme a ensuite
inventé les cadrans solaires lui permettant de compter les heures.
Plus tard, Galilée démontra expérimentalement qu’un pendule oscillait dans des inter-
valles de temps égaux. En utilisant un moyen mécanique pour compter les oscillations,
sans les arrêter, nous obtenons l’horloge à balancier. Avant 1967, l’étalon de mesure
des durées : la seconde était définie comme 1/86400 d’un jour moyen. Mais depuis
1967, la définition de la seconde a changé comme suit : c’est le temps nécessaire à un
rayon lumineux bien défini pour effectuer 9 192 631 770 oscillations. Ce rayon lumi-
neux est celui dont la fréquence provoque une excitation bien déterminée d’un atome
de césium-133. Ceci signifie qu’en une seconde, il y a 9 192 631 770 périodes de ce
« pendule atomique » dont la fréquence est proche des 10 gigahertz.

CHAPITRE 1. L’ÉTUDE DES MOUVEMENTS 3
Le tableau ci-dessous montre l’énorme étendue de l’échelle du temps.
Année Seconde Événements
15.109Age de l’Univers
14.109Age de notre galaxie
200.106Premiers hommes
86400 Un jour
10−3Période d’une onde sonore
10−6Période d’une onde radio
10−12 Période de rotation moléculaire
10−15 Période de vibration atomique
Table 1.2 – Une partie de l’échelle du temps
1.2 Repos ou Mouvement
Musti, le chat de Boby, est couché sans bouger dans un des fauteuils du salon de
la maison. Musti est immobile. Maintenant, imaginons les deux possibilités sui-
vantes :
1. ou bien il garde la même position ;
2. ou bien il quitte le fauteuil pour se rendre à la fenêtre pour voir si Boby revient
de l’école.
Dans le premier cas, les distances d’un point quelconque du chat aux murs du salon
ne varient pas. Nous disons qu’à l’intérieur du salon, Musti était au repos et qu’il y est
resté.
Dans le second cas, les distances d’un point quelconque du chat aux murs du salon
varient. Ces changements de position signifient que Musti a effectué un mouvement en
se déplacent dans l’espace.
Le mouvement de Musti est très compliqué. Sa description impliquerait le choix d’un
point de référence appartenant au corps de Musti. Cela pourrait être le bout de son
nez ou bien l’extrémité d’une de ses pattes ou bien encore le bout de sa queue. Et il
est certain que tous ces points n’ont pas effectué le même mouvement. Compte tenu
de nos connaissances actuelles en cinématique, il serait vain de tenter d’en établir les
équations. Néanmoins, Musti nous a permis de comprendre la notion de mouvement,
c’est là l’essentiel !
Quand un physicien se trouve devant une grosse difficulté, que fait-il ? Il simplifie l’expérience,
quitte même à l’idéaliser. Au lieu de considérer un « mobile » constitué d’un grand
nombre de parties différentes, se mouvant de manières différentes durant le dépla-
cement, nous allons choisir un autre mobile, le plus simple qui soit. Quel est-il ? A
l’évidence, il s’agit d’un mobile constitué d’un seul point que nous appellerons « parti-
cule »1. On définit une particule comme un corps dont on peut négliger ses dimensions
lorsqu’on décrit son mouvement.
La description du mouvement d’une particule consiste donc à connaître ses coordonnées
à chaque instant durant son mouvement. Cela implique le choix d’un système d’axes
1. au lieu « particule », nous pourrions aussi utiliser le mot« point matériel »

CHAPITRE 1. L’ÉTUDE DES MOUVEMENTS 4
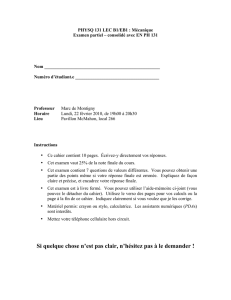
de référence comme représenté par la figure 1.1 ci-dessous : Les coordonnées d’une
Figure 1.1 – Coordonnées d’un point
[?]
particule en mouvement changent à chaque instant t. Il est donc nécessaire d’utiliser une
horloge pour mesurer le temps qui passe. Le lieu des positions qu’occupe la particule, à
chaque instant, s’appelle la « trajectoire » de la particule. Décrire son mouvement consiste
à établir les équations de la trajectoire, c’est-à-dire rechercher les relations qui existent
entre les coordonnées (x, y, z)et l’instant t.2
Les équations d’un point matériel au repos sont simples : x(t) = x0,y(t) = y0,z(t) =
z0. Ces équations expriment le fait que quel que soit l’instant t, les coordonnées ne
changent pas, ce qui est la définition cinématique du repos.
1.3 Le mouvement rectiligne uniforme — MRU
Soit une particule P se déplaçant en ligne droite. Sur cette droite, définissons un point
origine O à partir duquel nous mesurerons la distance qui le sépare de la position de
la particule P. Définissons aussi un sens positif sur cet axe, à l’aide d’une flèche orientée
vers la droite, par exemple.
Figure 1.2 – Le mouvement rectiligne uniforme
Supposons que la particule P se trouve au point M d’abscisse x(τd)=7km du point
origine O, et ce, à l’instant de son départ τd, par exemple 15h. A cet instant, la particule P
se déplace vers la droite à une vitesse constante V égale à 5 km/h, par exemple. Puisque
2. Tous les graphiques 2D de ce cours ont été réalisés avec le logiciel libre : GeoGebra
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
1
/
54
100%