Télécharger le cours en pdf - CdPMaths

http ://cdpmaths.free.fr
Les équations de droites - Classe de 2nde
1

http ://cdpmaths.free.fr
I - Équation de droites
1) Caractérisation analytique d’une droite
Propriétés : Soient m, p et c des nombres réels
Dans un repère, l’ensemble des points M(x;y) tels que x=cou y=mx +pest une droite.
Réciproquement, dans un repère, toute droite possède une équation soit de la forme
x=c
, soit de
la forme y=mx +p
Remarques : •ces équations sont appelées équations réduites de droites.
•une droite possédant une équation de la forme x=csera parallèle à l’axe des ordonnées
•
dans une équation de la forme
y=mx +p
, le réel
p
est appelé ordonnée à l’origine car il
indique l’ordonnée du point d’intersection de la droite avec l’axe des ordonnées et le réel
m
est appelé coefficient directeur car il indique la direction de la droite.
•
La droite d’équation
y=mx +p
est la représentation graphique de la fonction affine
f
définie
sur IR telle que f(x)=mx +p.
2 Document réalisé par S. Bignon

http ://cdpmaths.free.fr
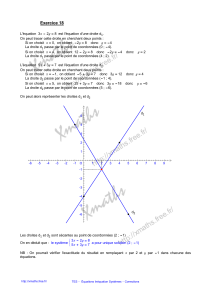
Exemple : Représentons les droites d’équations y=2x−3 et x=2 dans un repère (O;
~
i;
~
j).
Pour cela, soit on détermine les coordonnées de deux points par lesquels passe la droite, soit on
utilise les valeurs de l’ordonnée à l’origine et du coefficient directeur.
I
0
J
y=2x−3
x=2
P
~
v
M
ordonnée à l’origine : -3
coefficient directeur : +2
Propriété : Deux droites Det D0d’équations respectives y=mx +pet y=m0x+p0sont :
•parallèles si et seulement si m=m0
•sécantes si et seulement si m6= m0
3 Document réalisé par S. Bignon

http ://cdpmaths.free.fr
2) Déterminer l’équation d’une droite
Propriété :
Soient
A
(
xA
;
yA
) et
B
(
xB
;
yB
) deux points d’une droite
D
, le coefficient directeur
m
de
Dest tel que :
m=yB−yA
xB−xA
Exemple :
Cette propriété permet alors de déterminer l’équation réduite d’une droite passant par
deux points.
Déterminons alors l’équation de la droite D:y=mx +ppassant par les points A(2;−1) et B(−1;5).
On a :
m=yB−yA
xB−xA
=5−(−1)
−1−2= −2
donc Da pour équation y= −2x+pet comme Dpasse par le point A(2;−1), on en déduit que :
−1= −2×2+p
soit p=3
La droite Da donc pour équation y= −2x+3.
4 Document réalisé par S. Bignon

http ://cdpmaths.free.fr
II - Systèmes
1) Définitions
Définition :
Résoudre un système linéaire (
S
) :
ax +by =c
a0x+b0y=c0
, c’est trouver tous les couples de nombres réels
(x;y) qui vérifient à la fois les deux équations. Ces couples sont appelées solutions du système.
Exemple : Le couple (1,8;2,1) est solution du système
3x+2y=9,6
x+3y=8,1 car :
3×1,8 +2×2,1 =5,4 +4,2 =9,6
1,8 +3×2,1 =1,8 +6,3 =8,1
5 Document réalisé par S. Bignon
 6
7
6
7
1
/
7
100%