Une g n ralisation de l`algorithme JADE

1137
Dix-septième colloque GRETSI, Vannes, 13-17 septembre 1999

1138
Dix-septième colloque GRETSI, Vannes, 13-17 septembre 1999

1139
Dix-septième colloque GRETSI, Vannes, 13-17 septembre 1999

1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
−2
−1
0
1
2
3
4
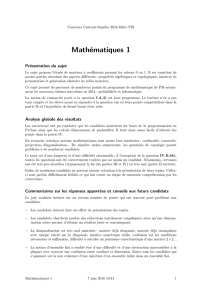
Cumulant Parameter
C3 and C4 for a PS signal
C3
C4
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
−35
−30
−25
−20
−15
−10
−5
0
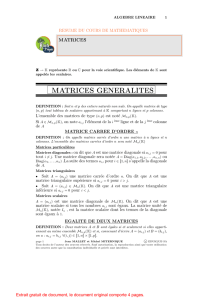
Cumulants Parameter
Mean Index (dB)
JADE
eJADE
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
−35
−30
−25
−20
−15
−10
−5
0
Cumulants Parameter
STD Index (dB)
JADE
eJADE
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
−35
−30
−25
−20
−15
−10
−5
0
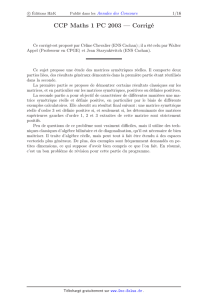
Cumulants Parameter
Mean Index (dB)
JADE
eJADE
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
−30
−25
−20
−15
−10
−5
0
Cumulants Parameter
STD Index (dB)
JADE
eJADE
1140
Dix-septième colloque GRETSI, Vannes, 13-17 septembre 1999
1
/
4
100%