Torseur cinématique : cours de cinématique

Cinématique V – Torseur cinématique - p.1
TORSEUR CINEMATIQUE
I – Rappel : le torseur cinématique
1. Composantes vectorielles du torseur cinématique
Dans le chapitre II cinématique du solide – mouvements simples nous avons mis en évidence
que le mouvement quelconque d'un solide S dans un repère R, est composé de deux éléments : la
rotation et la translation.
Un champ de vecteurs uniforme caractérise la vitesse globale de rotation du solide, et un champ
de vecteurs équiprojectif, représente les vitesses linéaires des points du solide.
La conséquence de l'équiprojectivité du champ des vecteurs vitesse, est que ce champ de
vecteurs est aussi le champ de moment d'un torseur le torseur cinématique.
Il nous reste à démontrer ce qui a été admis jusque là, que la résultante de ce torseur est bien le
vecteur vitesse angulaire.
2. Relation fondamentale des moments
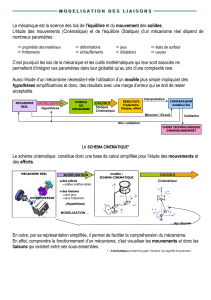
Soit un solide S animé d'un mouvement quelconque par rapport à un repère R
0
. Soit un repère
R, lié à S d'origine O
S
.
x
0
y
y
0
O
S
x
O
z
0
z
M
2.1.
Expression générale du vecteur vitesse d'un point
Déterminons l'expression de la vitesse absolue d'un point M de ce solide, il faut pour cela utiliser
la dérivation composée :

Cinématique V – Torseur cinématique - p.2
2.2.
Relation entre deux vecteurs vitesse
Soit N, un second point du solide S. Ecrivons la relation définie ci-dessus au point N :
MN)R/R()R/S,M(V)R/S,N(V
MN)R/R(MO)R/R()R/O(V)R/S,N(V
)MNMO()R/R()R/O(V)R/S,N(V
NO)R/R()R/O(V)R/S,N(V
000
0S00S0
S00S0
S00S0
∧Ω+=
∧Ω+∧Ω+=
+∧Ω+=
∧Ω+=
On reconnaît la relation fondamentale des moments du torseur cinématique, avec pour résultante
le vecteur vitesse angulaire du solide S dans R
0
.
avec :
3. Composantes scalaires du torseur cinématique
Comme tout torseur, le torseur cinématique a six composantes scalaires dans un repère donné R.
Les notations utilisées pour ces composantes sont les suivantes :
p, q, r , composantes du vecteur vitesse angulaire ;
u, v, w, composantes du vecteur vitesse linéaire ;
{ }
R,A
A
w
v
u
r
q
p
)R/S(V
=
Dans une chaîne de solides, avant analyse cinématique, on peut définir le torseur cinématique de
chaque liaison. Les composantes du torseur d'une liaison cinématique sont inconnues a priori. Ce
sont les inconnues cinématiques de la liaison.
II - Caractéristiques du torseur cinématique
1. Invariants d'un torseur
Soit le torseur défini par
{ }
A
A
AM
R
T
=
. On appelle "Invariant" d'un torseur, une quantité qui
reste constante quel que soit le point d'expression considéré.
# La résultante est un invariant vectoriel, par définition ;
#
ste
BAS
CRMRMI =⋅=⋅=
: le produit scalaire des deux éléments de réduction d'un torseur est
un invariant scalaire. La projection du vecteur moment sur la résultante est constante.
2. Axe central d'un torseur
L'axe central d'un torseur est la droite ∆ telle que quel que soit I ∈ ∆, la résultante, et le
vecteur moment en I du torseur sont colinéaires. Soit I ∈ ∆, M
MM
M
I
= λ
λλ
λ R
RR
R. λ est le pas du torseur,
homogène à une longueur.

Cinématique V – Torseur cinématique - p.3
La détermination de l'axe central d'un torseur dans le cas général sera vue en statique.
Considérons le torseur cinématique du mouvement du solide S en mouvement par rapport à un
repère R :
{ }
A
A
)R/S
)R/S,A(V )R/S(
V
Ω
=
Soit Q un point de l'axe central du torseur cinématique du mouvement de S alors :
λ pas du torseur
Soit Q
0
point de l'axe central, projeté orthogonal de A sur ∆ :
2
S
2
)R/S(
I
)R/S(
)R/S,A(V . )R/S(
Ω
=
Ω
Ω
=λ
2
o
)R/S(
)R/S,A(V)R/S(
AQ Ω
∧Ω
=
L'axe central est parallèle au vecteur résultante. Il est appelé "axe instantané de rotation et
de glissement".
3. "Image" du torseur cinématique
4. Axoïdes d'un mouvement
On considère toujours S un solide en mouvement par rapport à un repère R. Les surfaces
générées par ∆ dans les repères respectivement liés à S et à R sont les axoïdes du mouvement.
Les deux surfaces axoïdes sont tangentes suivant ∆. Leur mouvement relatif est une rotation
instantanée d'axe ∆ combinée à un glissement instantané suivant ∆. Les axoïdes sont pour un
mouvement spatial ce que sont la base et la roulante pour un mouvement plan.

Cinématique V – Torseur cinématique - p.4
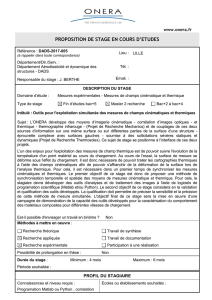
Exemple : un cylindre C roule sans glisser sur un plan incliné P.
En I, et sur tout point de la génératrice de contact, V(I,S/R) = 0. Ainsi l'axe central du torseur
cinématique est D, dirigé par la génératrice de contact. Dans ce cas particulier, il s'agit d'un axe
instantané de roulement.
Les axoïdes sont : le plan P, et le cylindre C.
P
C
∆
Torseur cinématique exprimé en I :
I
III – Torseurs cinématiques des mouvements particuliers
1.
Mouvement de translation
Dans le cas du solide en translation, tous les points ont même vitesse linéaire, il n'est alors plus
indispensable de préciser le centre d'expression du torseur. Il s'agit d'un torseur "moment pur", tout
point de l'espace est central.
2.
Mouvement de rotation
Dans le cas du solide en rotation, tous les points de l'axe de rotation ont une vitesse linéaire
nulle. Ainsi lorsque le centre d'expression du torseur cinématique est pris sur l'axe de rotation, le
torseur s'écrit :
avec O, point de l'axe de rotation (ou centre…)
L'axe central est l'axe de rotation qui est alors permanent dans le cas d'une rotation d'axe fixe, ou qui
possède un point fixe (l'axe de rotation est alors de direction variable).
3.
Mouvement hélicoïdal
Dans le cas du solide en mouvement hélicoïdal, l'axe de l'hélice est l'axe central permanent, et le
pas réduit de l'hélice donne la relation entre le moment et la résultante cinématique.
avec :
(S/R)p )R/S,O(V
r
Ω±=
, p
r
pas réduit :
π
=
2
p
p
r
.
Remarque :
le pas réduit de l'hélice est le pas du torseur.

Cinématique V – Torseur cinématique - p.5
IV – Composition des torseurs cinématiques
1. Composition cinématique
Soit un solide S en mouvement par rapport à un repère R lui-même en mouvement dans un
repère R
0
. Soit M un point de ce solide. Nous avons vu dans le chapitre "Composition de
mouvements" que :
et
Ceci s'écrit de manière évidente sous forme de composition de torseurs cinématiques :
{V(S/R
0
)}
M =
{V(S/R)}
M
+ {V(R/R
0
)}
M
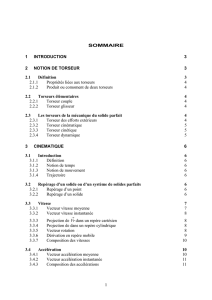
2. Application aux chaînes de solides ouvertes : liaison équivalente
2.1. Présentation : soient 1, 2 et 3, solides en liaison.
(1)
L
12
(2) (3)
L
23
La composition de mouvements s'écrit :
{
}
{
}
{
}
AAA
)1/2(V)2/3(V)1/3(V +=
2.2. Liaison équivalente
En considérant n solides en chaîne ouverte, la liaison équivalente L
équ
s'obtient en faisant la
somme des torseurs cinématiques des liaisons successives L
i
:
{ }
{ } { }
∑
−
=
== 1n
1i A
iA
A
équ ])L(V[)1/n(V)L(V
2.3. Mobilités de la liaison équivalente
Chaque liaison L
i
possède N
ci
inconnues de liaison. La mobilité cinématique d'une liaison est le
nombre de ces inconnues (cela correspond au nombre de degrés de liberté).
Alors la mobilité cinématique de la liaison équivalente est la somme des inconnues cinématiques
de chaque liaison, on obtient le nombre d'inconnues cinématiques de la liaison équivalente :
∑
−
=== 1n
1i CCiC NNm
2.4. Mobilités utiles mobilités internes
Lorsque dans une chaîne de solides, un solide peut se déplacer indépendamment des autres
solides, son ou ses mouvements indépendants constituent des mobilités internes m
i
à la chaîne
de solides, en opposition aux mobilités utiles m
u
. On note alors :
m
C
= m
u
+ m
i
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%