Fcts 2 variables

Problèmes de Mathématiques
PCSI
Erwan Biland
Lycée Stanislas, classe de PCSI 1, 2007/2008

Ce recueil de problèmes est destiné à accompagner le cours de
mathématiques pendant toute l’année de PCSI. Il contient la plupart des
problèmes posés aux élèves de PCSI 1, en temps libre ou en temps limité,
depuis 2005. J’y puiserai les devoirs que vous aurez à traiter cette année
en temps libre (par groupes de deux).
Malgré les nombreuses correction déjà effectuées, il subsiste certainement
des erreurs d’énoncé ou d’orthographe... Je vous remercie par avance de me
les signaler au fur et à mesure de leur découverte.
J’ai fait apparaître en italique, dans la table des matière ainsi que dans
l’en-tête de chaque problème, les parties du cours qui y sont abordées.
J’ai aussi essayé, autant que possible, d’apprécier la difficulté de chaque
problème en lui affectant un nombre d’étoiles compris entre zéro (très
facile) et quatre (très difficile). Attention, dans un problème coté à trois
étoiles (difficile), s’il est très progressif, les premières questions peuvent
être, malgré tout, relativement faciles.
Bon courage !
Erwan Biland - Problèmes PCSI 1 1

2Erwan Biland - Problèmes PCSI 1

Table des matières
Pour bien commencer
1 Sommes de puissances de nentiers........................... 7
Récurrence, résolution de systèmes, polynômes
2 Calcul de sommes et de produits . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Suites numériques, fonctions trigonométriques
3 Autour d’une suite de fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Fonctions usuelles, suites numériques
4 Etuded’unefonction .................................. 10
Fonctions trigonométriques
5 Résolution des équations du troisième degré . . . . . . . . . . . . . . . . . . . . . . 11
Nombres complexes, relations entre coefficients et racines d’un polynôme
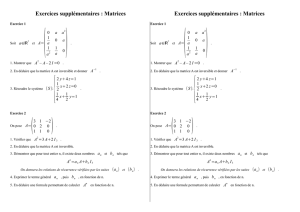
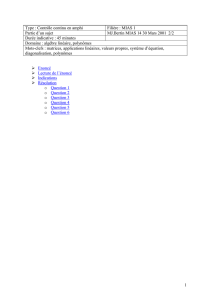
6 Matrices et homographies complexes . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Matrices, déterminant, nombres complexes, géométrie
Equations différentielles, équations fonctionnelles
7 Systèmes différentiels linéaires à coefficients constants . . . . . . . . . . . . . . . . 16
Equations différentielles, résolution de système
8 Une équation fonctionnelle, des équations différentielles . . . . . . . . . . . . . . . . 17
Fonctions de Rdans R, équations différentielles
9 Un problème de raccordement de solutions . . . . . . . . . . . . . . . . . . . . . . . 18
Equations différentielles
10 Une équation différentielle linéaire d’ordre 4 . . . . . . . . . . . . . . . . . . . . . . 19
Equations différentielles
11 Déterminant,wronskien................................. 20
Equations différentielles, algèbre linéaire
Géométrie élémentaire, courbes paramétrées, coniques
12 Autour d’une hyperbole équilatère . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Géométrie plane, coniques
13 Unecornedegazelle .................................. 23
Courbes paramétrées
14 Desproblèmesdelieux ................................. 24
Géométrie plane, coniques, courbes paramétrées
15 Lastrophoïdedroite................................... 25
Géométrie plane, courbes paramétrées
16 Des courbes définies par équation polaires . . . . . . . . . . . . . . . . . . . . . . . 26
Courbes en polaires, fonctions trigonométriques
Table des matières 3

17 Minimum d’une somme de distances . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Nombres complexes, inégalité triangulaire
18 Parabole, triangle et droite de Steiner . . . . . . . . . . . . . . . . . . . . . . . . . 28
Géométrie plane, coniques
19 Caractérisation des tangentes à une conique . . . . . . . . . . . . . . . . . . . . . . 30
Géométrie plane, coniques, résolution d’équations
Ensembles de nombres, suites numériques
20 Suites récurrentes doubles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Suites numériques, nombres complexes, algèbre linéaire
21 Limite supérieure, limite inférieure . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Suites numériques, borne supérieure dans R
22 Des développements asymptotiques . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Suites numériques, développements limités, fonctions de Rdans R
23 Série harmonique et séries alternées . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Suites numériques
24 Suites réelles sur-additives et multiplicatives . . . . . . . . . . . . . . . . . . . . . . 36
Suites numériques
25 Produit de convolution de deux suites . . . . . . . . . . . . . . . . . . . . . . . . . 37
Suites numériques
Etude locale des fonctions de Rdans R
26 Une équation fonctionnelle avec hypothèse de continuité . . . . . . . . . . . . . . . 38
Continuité des fonctions, suites numériques
27 Oscillation en un point d’une fonction bornée . . . . . . . . . . . . . . . . . . . . . 39
Borne supérieure dans R, limites de fonctions
28 MéthodedeNewton .................................. 40
Suites numériques, dérivation, comparaison des suites
29 Approximation de la constante d’Euler . . . . . . . . . . . . . . . . . . . . . . . . . 41
Suites numériques, théorème des accroissements finis
30 Fonctions absolument monotones . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Dérivation, récurrence
Convexité, intégration, révisions d’analyse
31 Deux inégalités de convexité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Dérivation, fonctions convexes
32 Intégrales de Wallis, formule de Stirling . . . . . . . . . . . . . . . . . . . . . . . . 45
Intégration, A compléter !
33 Calcul de Rπ
4
0√tan2x+ tan x+ 1 dx. ......................... 46
Intégration, polynômes
34 Révisionsd’analyse ................................... 47
Equations différentielles, développements limités, formules de Taylor...
Ensembles, groupes, anneaux, corps
35 Fonctions caractéristiques de parties . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Théorie des ensembles
36 Borne supérieure dans Pf(N)............................. 49
4Erwan Biland - Problèmes PCSI 1
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
1
/
78
100%