Support de cours - Semestre 3

CHAPITRE I
Dénombrement
1. Cardinal
Définition 1.1
Un ensemble Anon vide est dit fini s’il existe un entier net une bi-
jection de f1; 2; : : : ; ngsur A.
Lorsqu’il existe, l’entier nest unique et est noté CardA.
C’est le cardinal ou le nombre d’éléments de A
Définition 1.2
Un ensemble Aest dit dénombrable s’il existe une bijection de Nsur
A.
Un ensemble Aest dit infini non dénombrable s’il n’est ni fini, ni dé-
nombrable.
Proposition 1.3
Soit Aet Bdeux ensembles finis. Alors
1) Card.A [B/ DCardACCardBCard.A \B/ ;
2) si A\BD ;,Card.A [B/ DCardACCardB;
3) Card.A B/ D.CardA/ .CardB/.
Remarque
Pour dénombrer des situations :
lorsqu’on fait un choix ou un autre : on ajoute les nombres de
cas de chaque choix.
lorsqu’on fait un choix puis un autre : on multiplie les nombres
de cas de chaque choix.
2. Permutations
Soit Eun ensemble fini à néléments.
Définition 2.1
Une permutation de Eest un arrangement (ordonné) des néléments
de E.
Cela revient à prendre les néléments de Een tenant compte de l’ordre
dans lequel on les choisit.
Proposition 2.2
Le nombre de permutations d’un ensemble Eànéléments est :
nŠ D12 .n 1/ n
3. Arrangements
Soit k2Net Eun ensemble fini à néléments.
Définition 3.1
Un arrangement de kéléments de Eest un sous-ensemble ordonné
de kéléments (distincts) de E.
Cela revient à prendre kobjets dans Een tenant compte de l’ordre
dans lequel on les choisit.
Proposition 3.2
Le nombre de k-arrangements d’un ensemble à néléments est
Ak
nDPk
nDnŠ
.n k/Š
Définition 3.3
Un arrangement avec répétitions de kéléments de Eun ensemble
ordonné de kéléments de Enon nécessairement distincts.
Cela revient à prendre kobjets dans Een tenant compte de l’ordre
dans lequel on les choisit, et en pouvant prendre plusieurs fois le
même.
Proposition 3.4
Le nombre de k-arrangements avec répétitions de Eest égal à
nk
4. Combinaisons
Définition 4.1
Une combinaison de kéléments de Eest un sous-ensemble de E
formé de kéléments.
Cela revient à prendre kobjets dans Esans tenir compte de l’ordre
dans lequel on les choisit.
Proposition 4.2
Le nombre de k-combinaisons d’un ensemble à néléments Eest :
Ck
nD n
k!DnŠ
.n k/Š kŠ DAk
n
kŠ
Définition 4.3
Une combinaison avec répétitions de kéléments de Eest un ensemble
non ordonné de kéléments non nécessairement distincts de E.
Cela revient à prendre kobjets dans Esans tenir compte de l’ordre
dans lequel on les choisit, et en pouvant prendre plusieurs fois le
même.
Proposition 4.4
Le nombre de k-combinaisons avec répétitions de Eest
Ck
nCk1D nCk1
k!
5. Propriétés
Proposition 5.1
On a les propriétés suivantes :
1) n
0Dn
nD1et n
1Dn
n1Dn
2) n
pDn
np
3) nC1
pC1Dn
pC1Cn
p.
4) .x Cy/nDn
P
pD0n
pxpynp(Binôme de Newton)
5) n
P
pD0n
pD2n.
Théorème 5.2
Soit Eun ensemble fini à néléments et P.E/ l’ensemble des parties
de E. Alors CardP.E/ D2n
Vincent Jalby – Université de Limoges – L2 Economie – Semestre 3 – 2016-2017 – I. Dénombrement Page 1

CHAPITRE II
Calcul des probabilités
1. Introduction
Expérience aléatoire : expérience dont on ne peut pas prévoir le
résultat.
Issue, éventualité, résultat : résultat d’une expérience aléatoire,
noté !.
Univers des possibles : ensemble des résultats d’une expérience
aléatoire, noté .
Événement : ensemble d’éventualités associées à une expérience :
A
Événement élémentaire : événement composé d’une seule issue :
f!g
2. La tribu des événements
Définition 2.1
Soit un Univers.
Un événement de est un sous-ensemble de .
L’ensemble de tous les événements est appelé tribu des événements et
est noté F.
Définition 2.2
Soit un Univers et Fla tribu des événements de .
1) L’ensemble vide ;est appelé événement impossible et événe-
ment certain.
2) Si A2F, l’événement ADnAest appelé événement contraire
de A.
3) On dit qu’un événement A2Fimplique (ou entraîne) l’événe-
ment B2Fsi AB.
4) On dit que deux événements A; B 2Fsont incompatibles si
A\BD ;.
3. Probabilité
Définition 3.1
Une probabilité sur .; F/est une application PWF! Œ0; 1 vé-
rifiant :
1) P ./ D1
2) si A\BD ;, alors P .A [B/ DP .A/ CP .B/
3) [Généralisation à une suite d’événements]
Le triplet .; F; P / est appelé espace probabilisé.
Proposition 3.2
Soit .; F; P / un espace probabilisé. on a
1) P .;/D0
2) P .A/ D1P .A/
3) P .A [B/ DP .A/ CP .B/ P .A \B/
4) si AB, alors P .A/ 6P .B/ et P .B XA/ DP .B / P .A/.
Théorème 3.3
Soit D f!1; !2; : : : ; !ngun univers fini. Si p1; : : : ; pnsont les
probabilités des événements !1; : : : ; !n, on a nécessairement
p1Cp2C C pnD1
La probabilité Pest unique et est définie par
P .A/ DX
!i2A
pi8A2F
Equiprobabilité
On a équiprobabilité lorsque les événements élémentaires
!1; : : : ; !nont la même probabilité de se produire :
p1D D pnD1
n
On a alors
P .A/ DCardA
CardDnbre de cas favorables
nbre de cas possibles
4. Probabilité conditionnelle
Proposition 4.1
Soit .; F; P / un espace probabilisé et B2Favec P .B/ ¤0.
Pour A2F, on appelle probabilité de Asachant Ble réel
P .A jB/ DP .A \B/
P .B/
C’est la probabilité que Aa de se réaliser lorsque Bs’est déjà réalisé.
Proposition 4.2
Soit A; B 2Ftels que P .A/ ¤0et P .B/ ¤0.
Formule des probabilités totales :
P .A/ DP .A jB/ P .B / CP .A jB/ P .B /
Formule de Bayes :
P .B=A/ DP .A jB / P .B /
P .A jB/ P .B / CP .A jB/ P .B /
Théorème 4.3
Soit B1; : : : ; Bk2Fformant une partition de tels que P .Bi/¤
0et A2Ftel que P .A/ ¤0.
Formule des probabilités totales :
P .A/ DP .A jB1/ P .B1/C C P .A jBk/ P .Bk/
Formule de Bayes :
P .Bi=A/ DP .A jBi/ P .Bi/
P .A jB1/ P .B1/C C P .A jBk/ P .Bk/
Définition 4.4 (Événements indépendants)
On dit que deux événements A; B 2Fsont indépendants si
P .A \B/ DP .A/ P .B/
ou, de manière équivalente, si
P .A/ DP .A jB/ ou P .B/ DP .B jA/
La réalisation de A(ou de B) ne change pas la probabilité que B
(ou A) a de se réaliser.
Vincent Jalby – Université de Limoges – L2 Economie – Semestre 3 – 2016-2017 – II. Calcul des probabilités Page 2

CHAPITRE III
Variables aléatoires discrètes
1. Variable aléatoire réelle
Définition 1.1
Une variable aléatoire réelle (v.a.r.) sur .; F; P / est une applica-
tion XW! R.
On note
X./ D fX.!/; ! 2g
l’ensemble des valeurs (distinctes) prises par X.
Lorsque X./ est fini ou dénombrable, on dit que Xest une va-
riable aléatoire est discrète.
Lorsque X./ est infini non dénombrable (c’est-à-dire, lorsque X
peut prendre toutes les valeurs d’un intervalle réel), on dit que X
est une variable aléatoire continue.
Notations
Pour tout x2R, on note
.X Dx/ D f!2WX.!/ Dxg
et
.X 6x/ D f!2WX.!/ 6xg
2. Loi d’une variable aléatoire discrète
Soit Xune variable aléatoire discrète.
Comme X./ est fini ou dénombrable on peut le décrire par
X./ D fx1; x2; : : : ; xn; : : :g
Dans la suite, on désigne par pila probabilité de l’événement XD
xi:
piDP .X Dxi/
Définition 2.1
On appelle loi (ou distribution) de probabilité de Xla donnée des
couples
f.xi; pi/Wi2Ig
On la présente généralement sous forme de tableau
xi012
pi1=4 1=2 1=4
ou sous forme de graphique
1/4
1/2
012
1/4
1/2
0 1 2
Proposition 2.2
Si f.xi; pi/Wi2Igest la loi de probabilité d’une variable aléatoire
discrète, alors X
i2I
piD1
3. Espérance d’une variable aléatoire discrète
Définition 3.1
Soit Xune variable aléatoire discrète sur .; F; P /. On appelle es-
pérance de Xle réel
E.X/ DX
i2I
xipi
On note souvent DE.X/.
Proposition 3.2
Soit Xet Ydeux v.a. discrètes sur .; F; P /. Alors
1) E.X CY / DE.X/ CE.Y /
2) E.X/ DE.X/ pour tout 2R
3) Pour WR! R, on a
E..X// DX
i2I
.xi/pi
4) E./ Dpour tout 2R.
4. Variance d’une variable aléatoire discrète
Définition 4.1
Soit Xune variable aléatoire discrète sur .; F; P /. On appelle va-
riance de Xle réel
Var.X/ DEŒX E.X/2DX
i2I
ŒxiE.X/2pi
On appelle écart-type de Xet le réel
XDpVar.X/
Théorème 4.2 (Inégalité de Bienaymé-Tchebychev)
Pour tout ˛ > 0, on a
PjXE.X/j> ˛62
X
˛2
Grace à l’inégalité de Bienaymé-Tchebychev, on montre que
P . < X < C/ >0
P . 2 < X < C2/ >0:75
P . 3 < X < C3/ >0:88
Lorsque la distribution est symétrique et « en cloche » :
0.20
E(X)
P . < X < C/ 0:68
P . 2 < X < C2/ 0:95
P . 3 < X < C3/ 0:99
Proposition 4.3
Soit Xune v.a. discrète sur .; F; P /. On a
1) Var.X/ D2Var.X/ pour 2R
2) Var.X C/ DVar.X/ pour 2R
3) Var.X/ DE.X2/ŒE.X/2[Th. de König-Huygens]
Vincent Jalby – Université de Limoges – L2 Economie – Semestre 3 – 2016-2017 – III. Variables aléatoires discrètes Page 3

CHAPITRE IV
Lois discrètes usuelles
Dans la suite, on considère une urne contenant Nboules de deux
sortes :
des boules blanches en proportion p
et des boules noires en proportion q.
On a nécessairement
qD1p
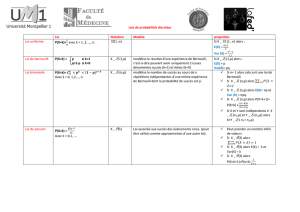
1. La loi de Bernoulli
Situation type
On tire au hasard une boule dans l’urne.
Soit alors Xla variable aléatoire valant 1si la boule tirée est blanche
et 0si elle est noire.
Généralisation
On dit qu’une v.a.r. Xsuit une loi de Bernoulli de paramètre psi
1) X./ D f0; 1g
2) P .X D1/ Dp
3) P .X D0/ DqD1p
On note alors
X ,!B.1; p/
Représentation graphique
Loi de Bernoulli B(1, 0.3)
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0 1
Proposition 1.1
Soit X ,!B.1; p/. Alors
E.X/ Dp
Var.X/ Dpq
2. La Loi binomiale
Situation type
On eectue ntirages successifs avec remises.
Soit Xle nombre de boules blanches apparues après les ntirages.
Généralisation
On dit qu’une v.a.r. Xsuit une loi binomiale de paramètres .n; p/
si
1) X./ D f0; 1; : : : ; ng
2) P .X Dk/ D n
k!pkqnkpour tout k2 f0; 1; : : : ; ng
On note alors
X ,!B.n; p/
Représentation graphique
Loi Binomiale B(20, 0.6)
0
0,02
0,04
0,06
0,08
0,1
0,12
0,14
0,16
0,18
0,2
5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
Proposition 2.1
Soit X ,!B.n; p/. Alors
E.X/ Dnp
Var.X/ Dnpq
3. La Loi hypergéométrique
Situation type
On eectue ntirages sans remise.
Soit Xle nombre de boules blanches apparues après les ntirages.
Généralisation
On dit qu’une v.a.r. Xsuit une loi hypergéométrique de paramètres
.N; n; p/ si
1) X./ f0; 1; : : : ; ng
2) P .X Dk/ D Np
k! N q
nk!
N
n!pour tout k2X./
On note alors
X ,!H.N; n; p/
Représentation graphique
Loi H(50, 20, 0.6)
0
0,05
0,1
0,15
0,2
0,25
5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
Vincent Jalby – Université de Limoges – L2 Economie – Semestre 3 – 2016-2017 – IV. Lois discrètes usuelles Page 4

Proposition 3.1
Soit X ,!H.N; n; p/. Alors
E.X/ Dnp
Var.X/ Dnpq Nn
N1
Remarque
Lorsque Nest très supérieur à n, on peut approcher la loi hyper-
géométrique par la loi binomiale :
H.N; n; p/ B.n; p/
Dans la pratique, on impose
N > 10n
4. La Loi géométrique
Situation type
On eectue des tirages successifs avec remises jusquà obtenir une
boule blanche.
On note Xle nombre de tirages eectués, c’est-à-dire, le nombre
de tirages nécessaires pour tirer une boule blanche.
Généralisation
On dit qu’une v.a.r. Xsuit une loi géométrique de paramètre psi
1) X./ D f1; : : : ; n; : : :g D N
2) P .X Dk/ Dpqk1pour tout k2N
On note alors
X ,!G.p/
Représentation graphique
Loi G(0.3)
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
1 2 3 4 5 6 7 8 9 10 11 12
Proposition 4.1
Soit X ,!G.p/. Alors
E.X/ D1
p
Var.X/ Dq
p2
Loi de Pascal
Généralisation de la loi géométrique consistant à eectuer des ti-
rages successifs (avec remises) jusqu’à obtenir rboules blanches.
Le nombre de tirages Xsuit alors une loi de Pascal. On note X ,!
Pascal.r; p/.
On a
1) X./ D fr; r C1; : : :g
2) P .X Dk/ Dk1
r1prqkr
3) E.X/ Dr
pVar.X/ Drq
p2.
Loi binomiale négative
Si dans le modèle précédent, on note Yle nombre d’échecs (boules
noires tirées), on a
YDXr
La loi suivie par Yest la loi binomiale négative BN.r; p/.
5. La Loi de Poisson
Processus de Poisson
Soit Xle nombre d’événements survenus sur une période donnée.
On suppose que
la probabilité qu’un événement a de se produire dans la période
ne dépend que de la durée de la période
le nombre d’événements se produisant durant la période est in-
dépendant du nombre d’événements survenus dans les autres
périodes.
Définition 5.1
On dit qu’une v.a.r. Xsuit une loi de Poisson de paramètre >0si
1) X./ D f0; 1; : : : ; n; : : :g D N
2) P .X Dk/ Dek
kŠ pour tout k2N
On note alors
X ,!P./
Représentation graphique
Loi de Poisson P(4)
0
0,05
0,1
0,15
0,2
0,25
0 1 2 3 4 5 6 7 8 9 10 11 12
Proposition 5.2
Soit X ,!P./. Alors
E.X/ D
Var.X/ D
Remarque
Lorsque pest petit et nest grand, on peut approcher la loi bino-
miale par la loi de Poisson :
B.n; p/ P.np/
Dans la pratique, on impose
p < 0:1 et n > 50
Vincent Jalby – Université de Limoges – L2 Economie – Semestre 3 – 2016-2017 – IV. Lois discrètes usuelles Page 5
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%