Projet Modélisation mathématique : Poumon

Projet Modélisation mathématique : Poumon
9décembre2016
1 Modélisation du comportement des alvéoles
On cherche à modéliser le comportement d’un mélange liquide-gaz. On suppose que le
liquide est incompressible, et que le gaz, compressible, se trouve dans le liquide sous la forme
de petites bulles qui contiennent le même nombre de molécules. On s’intéressera ici à une
modélisation mono-dimensionnelle de cette situation : on considère, sur le segment [0,L],une
alternance de gaz et de liquide, comme l’illustre la figure ci-dessous. On note ⇢la masse linéique
du liquide, de telle sorte que la masse d’un "segment" Sicentré en xiest ⇢b. Le gaz piégé entre
deux segments successifs est supposé obéir à la loi des gaz parfaits à température constante,
c’est-à-dire
(pression) ⇥(volume) =Constante ⇥(nbre de molécules de gaz) ,
soit,
PV =kN , (1.1)
où le "volume" représente en fait une longueur dans le cadre de ce modèle mono-dimensionnel.
On suppose les deux extrémités fixes (x0et xn+1 positionnées en 0et L, respectivement, sont
fixes), et on prend un nombre de molécules de gaz dans chaque poche constant égal à N.On
considèrera que Ns’écrit (a+b),oùest le nombre de molécules de gaz par unité de longueur
du mélange. Ce système liquide/gaz admet un état d’équilibre représenté schématiquement
sur la figure ci-dessus, pour lequel toutes les bulles ont la même taille b. Les positions des
centres des segments fluides sont (en notant h=a+b)
X0=0,X
1=h,··· ,X
i=ih , ··· ,X
n+1 =(n+ 1)h=L. (1.2)
1

On note xi=Xi+uila position du centre de Si(ième segment), de telle sorte que l’état
d’équilibre correspond à ui=0pour tout i. Le bilan Fides forces s’exercant sur un élément
de liquide centré en xiest la somme des pressions exercées à droite et à gauche par le gaz,
c’est-à-dire d’après le modèle (1.1)
Fi=kh✓1
a+uiui1
1
a+ui+1 ui◆.
La masse de Siétant ⇢b, la relation fondamentale de la dynamique s’écrit donc
⇢b¨ui=Fi.(1.3)
On note u=(u1,··· ,u
n)le vecteur des inconnues, vi=˙uila vitesse de Si,vle vecteur des
viet Fle vecteur des forces Fi. On peut se ramener de cette facon à un système du premier
ordre dans R2n:8
>
<
>
:
du
dt=v,
⇢bdv
dt=F(u)
(1.4)
1. On se limite, dans ces questions comme dans les suivantes, à des conditions initiales
admissibles, c’est-à-dire telles que xi+1 xi>b, c’est-à-dire ui+1 ui>a,pourtout
i=0,··· ,n, (les segments rigides ne se touchent pas) la vitesse initiale étant quel-
conque. Montrer que, pour toute condition initiale admissible, le problème de Cauchy
admet une solution unique globale (i.e. définie sur R+).
2. Représenter les tailles des bulles en fonction du temps (il doit y avoir n+1 courbes
représentant chacune la taille d’une bulle au cours des itérations en temps), pour des
valeurs des paramètres k,n,L,F,a,b,⇢et ↵de votre choix.
3. Montrer que la configuration où toutes les bulles sont de même taille (i.e. u=0) est
l’unique point fixe.
4. Montrer que ce point fixe est stable.
5. Illustrer le résultat précédent numériquement.
6. On rajoute à la force un terme de frottement visqueux, de telle sorte que l’équation sur
la quantité de mouvement s’écrit
⇢bdv
dt=F(u)v ,
avec >0. Montrer que u=0reste l’unique point fixe du système, et qu’il est
maintenant asymptotiquement stable. Illustrer ce résultat numériquement.
2 Modélisation de l’écoulement de l’air dans l’arbre bronchique
2.1 Introduction
L’arbre bronchique humain est un arbre comportant 23 générations. Dans une première
partie, on va modéliser l’écoulement de l’air dans un tel arbre fini. Puis dans une deuxième
partie, on va s’intéresser à ce qui se passe dans le cas d’un arbre infini.
2

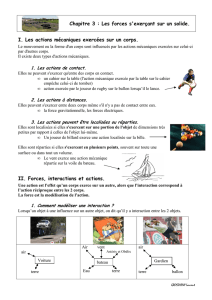
Figure 1 – Arbre dyadique
On considère l’écoulement d’un fluide visqueux incompressible non inertiel à travers un
tuyau. La pression est supposée uniforme sur les sections extrémités du tuyau (qui seront
notées 0 et 1). Les forces extérieures exercées sur le fluide sont caractérisées par deux valeurs
P0et P1et il existe un coefficient r>0reliant le flux Q(considéré positif si le fluide va de 0
vers 1) et le saut de pression : P1P0=rQ. Par analogie avec des conducteurs éléctriques
(flux et pression jouent les rôles de l’intensité et du potentiel, respectivement), rest appelé
la résistance du tuyau. Celle-ci dépend des caractéristiques geometriques du tuyau et de la
viscosité du fluide.
2.2 Arbre dyadique fini
On considère maintenant un arbre dyadique composé de tuyaux. La taille de l’arbre est N+1
(voir figure 1). On suppose que sur une même génération, n, tous les tuyaux ont la même
résistance rn>0. On fixe la pression à la racine de l’arbre égale à 0.Onnoteqiet pile flux
et la pression, respectivement, correspondant à l’extrémité i,pouri=0,...,2N1.
Soient p=(pi)i=0,...,2N1et q=(qi)i=0,...,2N1, le vecteur pression et le vecteur flux aux
extrémités de l’arbre avec la convention qu’un flux est considéré positif quand le fluide entre
dans l’arbre.
Definition 2.1. Soient iet jdeux entiers positifs et leurs expressions binaires i=P1
k=0 ↵k2k,
j=P1
k=0 k2kavec ↵k,
k2{0,1},8k, on définit ⌫ij par ⌫ij =inf{k0,↵
`=`8`k}.
Question 7 : On considère un arbre dyadique de taille N+1 caractérisé par ses résistances
r0,r1,r2,...,rNsupposées constantes sur chaque génération. Si la valeur de la pression à la
racine vaut 0, montrer la relation suivante :
p=ANq,A
N=AN
ij 0i,j2N12M
2N(R),A
N
ij =RN⌫ij ,(2.1)
3

où Rnest la resistance cumulée r0+r1+···+rn.Indications : Montrer que
pi=
2N1
X
j=0
qjRN⌫ij .(2.2)
Question 8 : Montrer qu’à une constante multiplicative près, la matrice
AN=AN
ij 0i,j2N12M
2N(R),
définie par AN
ij =RN⌫ij est une matrice doublement stochastique (la somme des éléments de
chaque ligne et de chaque colonne vaut 1).
2.3 Arbre dyadique infini
Lorsque Ntend vers l’infini, en supposant que les extrémités (i.e. les feuilles de l’arbre) vont
couvrir un domaine donné ⌦de l’espace Rd, nous nous proposons d’étudier s’il est possible de
prendre la limite de la relation (2.1) et si oui nous allons décrire la relation continue obtenue.
Dans ce texte, on va se restreindre au cas où d=1et où ⌦est l’intervalle I=]0,1[.
La première étape est de donner un sens au problème discret au niveau continu. Pour cela,
on procède comme suit : soit une taille d’arbre N>0, on identifie l’extrémité ide l’arbre TN
au segment ]ihN,(i+ 1)hN[⇢I,avechN=1/2N. Il est alors possible de définir l’opérateur
RNsuivant :
Definition 2.2. Soit u2L2(I), on définit le vecteur flux qN=qN
ii=0,...,2N1par qN
i=
R(i+1)hN
ihNu(y)dy. Le vecteur pression correspondant est défini par pN=pN
ii=0,...,2N1=
ANqN,oùAN2M
2N(R)est la matrice exprimant la relation (2.2). Enfin, on définit p2L2(I)
comme étant la fonction ayant la valeur constante pN
isur chaque sous-intervalle ]ihN,(i+
1)hN[. L’opérateur RNassocié est défini par p=RNq.
Question 9 : Montrer que l’opérateur RNdéfini précédemment envoie L2(I)sur lui-
même. Montrer que celui-ci peut-être exprimé comme suit : p=RNu() p(x)=RIKN(x, y)u(y)dy
p.p. sur I,oùKN2L1(I⇥I)est la fonction constante par morceaux définie par
x2]ihN,(i+ 1)hN[,y 2]ihN,(j+ 1)hN[7! RN⌫ij .
2.3.1 Convergence presque partout
Definition 2.3. Pour tout x=P1
k=0
↵k
2ket y=P1
k=0
k
2kdans I, donnés par leurs expressions
dyadiques (noter que ↵0=0=0), on définit µxy =sup{k1,↵
`=`8`<k}.
Question 10 : Le noyau KNconverge presque partout vers une fonction mesurable K
définie par : (x=P1
k=0
↵k
2k,y=P1
k=0
k
2k)2I⇥I7! K(x, y)avec K(x, y)=0si l’une
des suites (↵k),(k)a un nombre fini de termes non nuls, ou si x=y, et K(x, y)=Rµxy
sinon. Indications : Remarquer que KNet KN1sont reliés par KN(x, y)=KN1(x, y)+
rNP2N1
i=0 N
i(x, y)où N
iest la fonction caractéristique du carré ]ihN,(i+ 1)hN[⇥]ihN,(i+
1)hN[⇢I⇥I. Une conséquence est que, pour tout couple extra-diagonal (x, y)(i.e. tel que
x6=y), (KN(x, y))Nest stationnaire dès que N>log2|yx|.
4

2.3.2 Convergence L2
Soit p2[1,+1[, soit (fN)N2Nune suite de Lp(I),alorsfN!fdans Lp(I)si limN!+1RI|fN(x)
f(x)|pdx =0. On rappelle que si fN!fdans Lp(I)alors il existe une sous-suite de (fN)N2N
qui converge presque partout sur Ivers f.
Question 11 : (plus difficile) Si pour toute fonction ude L2(I),RNu!Rudans
L2(I)alors montrer que P+1
n=0 rn
2n<+1.Indications : Considérer la fonction uidentique-
ment égale à 1sur I, calculer RN(u)(x)pour les réels xde In’étant pas de la forme k/2N
avec k2Net exprimer la convergence presque partout d’une sous-suite de (RN(u)(x))N.
Question 12 : (plus difficile) Si P+1
n=0 rn
2n<+1, montrer qu’alors on a KN!Kdans
L1(I⇥I)où Kest défini dans une question précédente.
Question 13 : (plus difficile) Dans le cas où Prn/2n=+1,KNse "concentre" dans
un voisinage de la diagonale de I⇥I, et montrer que : pour tout q2L2(I),RI˜
KN(x, ·)q(x)dx !
q(·)dans L2(I),où ˜
KN=KN/kKNkL1(I⇥I).Indications : Commencer par montrer le ré-
sultat pour q2C0(I)puis utiliser par un argument de densité. Utiliser que (KN(x, y))Nest
stationnaire dès que N>log2|xy|.
2.3.3 Décomposition spectrale de R. Base de Haar
On définit l’opérateur Rde L2(I)dans lui même par :
p=Ru() p(x)=ZI
K(x, y)u(y)dy p.p. sur I, (2.3)
où Kest défini dans une question précédente. Soit J⇢R, la fonction 1Jest définie par
1J(x)=1si x2Jet 0sinon.
Definition 2.4 (Base de Haar).Soit 2L2(I)définie par =1
]0,1/2[ 1]1/2,1[.Pourtout
N0,0k2N1,onintroduitx2I7! N,k(x)=2
N/2 (2Nxk), et on définit 0
par 0(x)⌘1. La famille ( 0,( N,k)0N,0k2N1)est une base de Hilbert de L2(I), appelée
base de Haar.
Question 14 : Montrer que la base de Haar ( 0,( N,k)0N,0k2N1)est une famille
de vecteurs propres pour R. Montrer que la famille de valeurs propres correspondantes est
(0,(N,k)0N,0k2N1), avec
N,k =⇢N+1 =
+1
X
`=N+1
r`
2`0N, 0k2N1,
et 0=⇢0=P+1
`=0
r`
2`est la résistance globale.
2.3.4 Arbre géométrique
On considère dans cette partie le cas où les résistances suivent une loi géométrique rn=
r0↵noù ↵est un paramètre. On suppose ↵2]0,2[, si bien que Rdéfini par (2.3) est bien
défini comme un opérateur de L2(I)sur lui-même. Cet opérateur est symétrique tel que
5
 6
6
1
/
6
100%