Correction du contrôle continu Probabilités

Universit´e de Strasbourg Math´ematiques-Economie
UE −Probabilit´es Niveau −L3, ann´ee −2012-2013
Correction du contrˆole continu
Probabilit´es
Questions de cours −
1) Fest une tribu des parties de Ω si :
i) Ω ∈ F,
ii) F ⊂ P(Ω),
iii) Fest stable par passage au compl´ementaire,
iv) Fest stable par union d´enombrable.
2) Une mesure est une fonction d’ensemble d´efinie sur Fet `a valeurs dans [0,∞] qui est
σ-additive (voir ´enonc´e de l’exercice 1). Pour que ce soit une mesure de probabilit´e, il faut
en plus que P(Ω) = 1.
3) La fonction X: (Ω,F)7→ (R,B(R)) doit ˆetre mesurable, c’est `a dire :
∀A∈ B(R), X−1(A) = {ω∈Ω|X(ω)∈A} ∈ F.
Exercice 1 −
1) La fonction fest positive et de plus
ZR
f(x)dx =Z∞
1
x−2dx =−x−1∞
1= 1.
2) Pour que µsoit une mesure de probabilit´e sur (R,B(R)) il faut que µ(R) = 1. Or,
µ(R) = 1
3ν(R) + βδ2(R) = 1
3+β,
car d’apr`es la question 1), νest une mesure de probabilit´e (donc ν(R) = 1) et que 2 ∈R.
Donc on a β= 2/3.
3) Soit A∈ B(R). On a
µ(A) = P(X−1(A)) = P(X∈A).
4) Soit t∈R. Il faut calculer :
µ(] − ∞, t]) = 1
3ν(] − ∞, t]) + 2
3δ2(] − ∞, t]) = 1
3Zt
−∞
f(x)dx +2
3δ2(] − ∞, t]).
Ainsi, si t < 1, µ(] − ∞, t]) = 0. Si t∈[1,2[,
µ(] − ∞, t]) = 1
3Zt
1
x−2dx =−1
3x−1t
1=1
31−1
t.

Enfin, si t≥2,
µ(] − ∞, t]) = 1
31−1
t+2
3= 1 −1
3t
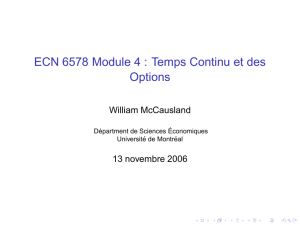
On trace ci-dessous la fonction F t) := µ(] − ∞, t]).
0246810
0.0 0.2 0.4 0.6 0.8 1.0
t
F(t)
0246810
0.0 0.2 0.4 0.6 0.8 1.0
c
0246810
0.0 0.2 0.4 0.6 0.8 1.0
0246810
0.0 0.2 0.4 0.6 0.8 1.0
0246810
0.0 0.2 0.4 0.6 0.8 1.0
Il ensuite facile de remarquer que Fest une fonction croissante, continue partout sauf
au point 2, admettant une limite `a gauche et ´etant continue `a droite au point 2. Enfin,
F(−∞) = 0 et F(+∞) = 1.
5) On a:
E(|X|) = E(X) = ZΩ
XdP=ZR
xµ(dx) = 1
3ZR
xν(dx) + 2
3ZR
xδ2(dx)
=1
3Z∞
1
x−1dx +4
3=∞.
Donc Xn’est pas int´egrable.
6)
E(|log(X)|) = E(log(X)) = 1
3Z∞
1
log(x)
x2dx +2
3log(2)
=1
3Z∞
0
xe−xdx +2
3log(2) = 1
3(1 + 2 log(2)).

Exercice 2 −
1)
fY(y) = ZR
1
π√3exp −2
3(x2−xy +y2)dx
=1
2πexp −1
2y2ZR
2
√3√2πexp −1
2
(x−y/2)2
3/4dx =1
2πexp −1
2y2,
puisque
g(x) := 2
√3√2πexp −1
2
(x−y/2)2
3/4
est la densit´e d’une loi normale de moyenne y/2 et de variance 3/4. Donc Ysuit une loi
normale centr´ee et r´eduite.
2) La densit´e conditionnelle de Xsachant Y=yest donn´ee par :
fX|Y=y(x) = f(x, y)
fY(y)=2
√3√2πexp −1
2
(x−y/2)2
3/4.
Ainsi, Xsachant Ysuit une loi normale de moyenne Y/2 et de variance 3/4.
3) D’apr`es la question pr´ec´edente, l’esp´erance conditionnelle E(X|Y) est ´egale `a Y/2.
1
/
3
100%