Groupe fondamental et revêtement

Groupe fondamental et revˆetement
Pr´emaster, Ens de Lyon
Cours de Claude Danthony
Printemps 2016

Avant-propos
Ces notes de cours ont ´et´e retranscrites par Matthieu Joseph. Les erreurs qui s’y trouvent ne sont en aucun
cas dˆues `a M. Danthony. Dans ce cours, on introduit la notion de groupe fondamental, construit `a partir de
lacets. Ensuite, on d´efinit les revˆetements, pour arriver `a la construction du revˆetement fondamental d’un espace
topologique. Enfin, on ´enonce le th´eor`eme de Van Kampen sans en donner la preuve.
Je remercie Quentin Vila pour le patron du tore `a deux trous qu’il m’a fourni, et Christopher-Lloyd Simon
pour sa relecture attentive.
1

Table des mati`eres
I Homotopie, chemins, groupe fondamental 3
I-1. Homotopie(g´en´erale)........................................... 3
I-2. Typed’homotopie ............................................ 4
I-3. Homotopie relative, r´etract´es . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
I-4. Chemins.................................................. 5
I-5. Groupefondamental ........................................... 6
I-6. Π1etapplications ............................................ 7
I-7. Invarianceparhomotopie ........................................ 8
I-8. Produits.................................................. 8
II Calculs de Π19
II-1.Lecercle.................................................. 9
II-2.Tores.................................................... 10
II-3.Sph`eres .................................................. 10
II-4.Applications................................................ 11
II-5. Hors piste : groupe d’homotopie des sph`eres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
II-6.Bouquetdecercles ............................................ 11
II-7.Espacesprojectifs............................................. 12
II-8.Surfaces .................................................. 13
III Revˆetements 14
III-1.D´efinition ................................................. 14
III-2.Propri´et´es................................................. 15
III-3.Morphismederevˆetement ........................................ 16
III-4.Actionpropreetlibre .......................................... 16
III-4.a)Rappelsdetopologie....................................... 16
III-4. b)Rappels sur les actions de groupes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
III-4. c)Action de groupe et revˆetement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
III-5.Rel`evements................................................ 18
III-6.Action de Aut(E)............................................. 20
IV Lien entre groupe fondamental et revˆetement 21
IV-1.Quelquespropositions .......................................... 21
IV-2.Groupe fondamental et revˆetements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
IV-3.Actiondugroupefondamental ..................................... 22
IV-4.Revˆetementuniversel........................................... 24
IV-5.CorrespondancedeGalois ........................................ 25
V Th´eor`eme de Van Kampen 28
V-1. Quelques compl´ements d’alg`ebre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
V-2.Th´eor`emedeVanKampen........................................ 29
2

I
Homotopie, chemins, groupe fondamental
I-1. Homotopie (g´en´erale)
D´
efinition : Soient f0, f1continues, de Xdans Yespaces topologiques. f0et f1sont dites homotopes
lorsqu’il existe Hune homotopie de f0`a f1: une application continue de X×[0,1] dans Ytelle que
∀x∈X, H(x, 0) = f0(x)et H(x, 1) = f1(x).
Ainsi, une homotopie entre deux applications f0et f1repr´esente une d´eformation continue de f0`a f1. On
rappelle qu’une application est la donn´ee d’un espace de d´epart, d’un espace d’arriv´ee et du graphe de l’appli-
cation. Dans la th´eorie de l’homotopie, l’espace d’arriv´ee est important.
La propri´et´e “f0homotope `a f1” est une relation d’´equivalence sur l’ensemble des fonctions continues de X
dans Y. En effet :
·f0est homotope `a f0via l’homotopie H(x, s) = f0(x).
·Si f0est homotope `a f1par l’homotopie G, alors f1est homotope `a f0via l’homotopie G(x, s) = H(x, 1−s).
·Si f0est homotope `a f1par Fet f1homotope `a f2par G, alors l’application Hd´efinie par
H(x, s) = F(x, 2s) si s∈[0,1/2]
=G(x, 2s−1) si s∈[1/2,1]
est continue sur X×[0,1] et d´efinit une homotopie de f0`a f2.
Exemples d’applications homotopes :
·Si Yest une partie convexe non vide d’un espace vectoriel norm´e, alors f:X→Yest homotope `a une
application constante. Il suffit de poser H(x, s) = (1 −s)f(x) + sy0, o`u y0est un ´el´ement de Y.
·Soient Sn−1={x∈Rn|kxk2= 1}, et f0, f1:X→Sn−1telles que ∀x, f0(x)6=−f1(x). Alors f0est
homotope `a f1. En effet, il suffit de poser
H(x, s) = (1 −s)f0(x) + sf1(x)
k(1 −s)f0(x) + sf1(x)k
qui est bien d´efinie et continue donc une homotopie dans Sn−1.
Ainsi, d`es que deux applications f0, f1:X→Sn−1v´erifient
distsup(f0, f1) := sup
x∈X
d(f0(x), f1(x)) <2,
alors elles sont homotopes.
Nous allons maintenant donner un exemple de deux applications qui ne sont pas homotopes.
Th´
eor`
eme : Id :Sn−1→Sn−1n’est pas homotope `a une constante.
En fait, nous n’allons pas d´emontrer ce th´eor`eme dans ce cours (sauf dans le cas n= 1,2), car cela utilise
des outils plus complexes que le groupe fondamental. En effet, ce th´eor`eme est ´equivalent au th´eor`eme de
Brouwer :
Th´
eor`
eme de Brouwer : Les deux ´enonc´es suivants sont vrais et ´equivalents :
·Toute application continue de Bn={x∈Rn| kxk261}dans Bnadmet un point fixe.
·Il n’existe pas d’application (r´etraction) r:Bn→Sn−1continue telle que r|Sn−1=IdSn−1.
3

Preuve : Nous montrons seulement l’´equivalences des deux propositions du th´eor`eme de Brouwer, en s’inspirant largement de
la d´emonstration trouv´ee dans [SR]
S’il existe une r´etraction r, posons f(x) = −r(x). Si xest sur la sph`ere Sn−1alors f(x) = −r(x) = −xqui est diff´erent de x. Si x
n’est pas sur la sph`ere Sn−1, il est dans l’int´erieur de Bnmais alors f(x) = −r(x)∈Sn−1, donc f(x)6=x. Ainsi fn’a pas de point
fixe.
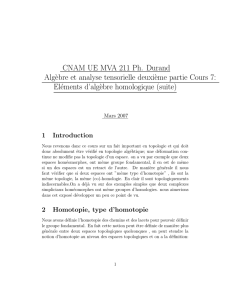
S’il existe fsans point fixe, alors la demi-droite issue de f(x) et passant par le point x, qui est distinct de f(x) recoupe Sn−1en
un seul point r(x). Nous allons montrer que rest une r´etraction de Bndans Sn−1.
·f(x)
·x
·
r(x)Sn−1Si x∈Sn−1alors r(x) = x. Il reste `a montrer que rest continue. Les points de la demi-droite issue de
f(x) et passant par xsont les points de la forme f(x) + t(x−f(x)) avec t∈R+. Un tel point est dans
Sn−1si et seulement si
1 = kf(x)−t(x−f(x))k2=kf(x)k2+ 2thf(x), x −f(x)i+t2kx−f(x)k2.
Donc tdoit ˆetre la racine positive de l’´equation de degr´e 2 ci-dessus, que l’on notera t(x). En exprimant
t(x) on voit que x→t(x) est une fonction continue, donc r:x→f(x) + t(x)(x−f(x)) aussi.
D’o`u l’´equivalence recherch´ee.
Pour une r´ef´erence `a la d´emonstration du th´eor`eme de Brouwer, voir le journal de maths des ´el`eves
([dMd´
E], volume 4 de l’ancien journal. )
Dans le premier th´eor`eme ´enonc´e, regardons le cas n= 1 : S0={−1,1}n’est pas connexe par arcs. Donc
l’identit´e de S0ne peut pas ˆetre homotope `a une constante. D´emontrons maintenant que le th´eor`eme que l’on
a ´enonc´e est ´equivalent au th´eor`eme de Brouwer.
Preuve de l’´
equivalence des th´
eor`
emes : Supposons qu’il existe une homotopie Hd’une constante x0`a l’identit´e de Sn−1.
H:
Sn−1×[0,1] →Sn−1
(x, 0) 7→ x0
(x, 1) 7→ x
Consid´erons la relation d’´equivalence (x1, s1)∼(x2, s2)⇔s1=s2= 0 ou x1=x2, s1=s2.Hpasse au quotient en une fonction
continue r:Sn−1×[0,1] /∼→Sn−1. Or il se trouve que Sn−1×[0,1] /∼est hom´eomorphe `a Bn. Donc il existe une r´etraction de
Bndans Sn−1
S’il existe rr´etraction, alors H(x, s) = r(sx) est une homotopie entre la constante r(0) et IdSn−1.
Remarque : On peut de nouveau insister sur le fait que l’ensemble d’arriv´ee d’une application est fondamental
lorsqu’on parle d’homotopie. En effet, Id :Sn−1→Sn−1n’est pas homotope `a une constante. En revanche,
l’application Id :Sn−1→Rnl’est.
L’homotopie d’applications se comporte bien par passage `a la composition. Si f0et f1sont homotopes par
F:X→Yet g0, g1homotopes par G:Y→Z, alors g0◦f0et g1◦f1sont homotopes. L’homotopie est en effet
donn´ee par l’application H(x, s) = G(F(x, s), s).
I-2. Type d’homotopie
L’objectif est maintenant de classer les espaces topologiques grˆace `a l’homotopie.
D´
efinition :
- On dit que Xet Ydeux espaces topologiques ont mˆemes type d’homotopie lorsqu’il existe f:X→Y
continue et g:Y→Xcontinue telle que g◦fsoit homotope `a IdXet f◦gsoit homotope `a IdY.
- On dit que Xest contractile s’il a le mˆeme type d’homotopie qu’un point.
Exemples d’espaces contractiles et ayant mˆeme type d’homotopie :
·Si Xet Ysont hom´eomorphes, alors ils ont mˆeme type d’homotopie.
·La sph`ere Snn’est pas contractile.
·Une partie Aconvexe d’un espace vectoriel norm´e est contractile, en effet si x0∈A, on peut consid´erer
f:{x0}→Xet g:X{x0}. Alors g◦f:{x0}→{x0}est l’identit´e et f◦g:X→Xest homotope `a
IdX:H(x, s) = sx + (1 −s)x0.
·En revanche, la sph`ere Snpriv´ee d’un point est contractile. En effet, Sn\{p}est diff´eomorphe (donc
hom´eomorphe) `a Rnvia la projection st´er´eographique. Sn−1\{p}a donc mˆeme type d’homotopie que Rn,
qui est contractile par le point pr´ec´edent, donc Sn−1l’est aussi.
4
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
1
/
31
100%