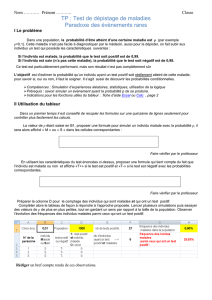
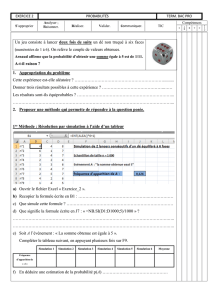
Reconnaissance de formes

1
RECONNAISSANCE DE FORMES
ECRITURE MANUSCRITE
SIGNATURE
VISAGES, BIOMETRIE
OBJETS ET ENVIRONNEMENT EN ROBOTIQUE
idée à retenir : tout cela ne marche pas très bien les approches sont encore
élémentaires ; on ne sait pas encore mimer le fonctionnement cérébral
A. approche statistique pour les objets « simples » : mesure sur des objets
par exemple en chaîne de production « bons » et « mauvais »
B. approche structurelle : description d’objets complexes sous forme de
graphes liant des objets plus simples pour représenter ces objets complexes

2
un objet analysé à reconnaître est représenté sous la forme
d’un vecteur de paramètres
approche standard en reconnaissance de formes d’objets « simples »
(classification)
dans le même espace, on dispose de formes types,
apprises au préalable correspondant aux objets à reconnaître
reconnaître l’objet c’est décider que le vecteur caractérisant
l’objet analysé à reconnaître est suffisamment proche d’un
des vecteur mémorisés lors de l’apprentissage
problèmes : bruit, préanalyse incorrecte (contours, régions)
fluctuations importantes d’un objet à l’autre
approche probabiliste ; théorie de la décision (critère de bayes
et de neyman pearson)
A. approche statistique
nécessité d’un
apprentissage
http://www.ee.columbia.edu/~sfchang/course/spr/

3
Reconnaissance de formes Approche statistique
Un objet est décrit comme un ensemble de paramètres (un vecteur
de dimension réduite)
longueur
largeur

4
Il y a des fluctuations d’un objet à l’autre
longueur
largeur
Formalisation probabiliste
R
L
longueur
largeur
R
L
Chaque groupe (classe) est associée à un nuage de points
Comment décide t on de l’appartenance à une classe ?

5
mesure de paramètres
objet représenté par un vecteur
séparation de
l’espace des
paramètres en régions
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
1
/
104
100%