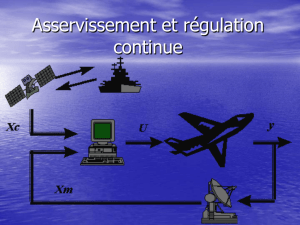
Régulation Industrielle & Performance du Système: Introduction
Telechargé par
mahamadoukadri7

Plan du chapitre
I. Introduction
II. Notion de performances
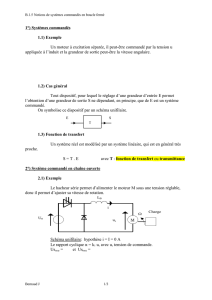
1. La stabilité des systèmes
2. La précision des systèmes
3. La rapidité des systèmes
4. La notion du dépassement
Introduction à la Régulation Industrielle et Rappel
sur les Performances des Systèmes
2017 –2018

Objectif : Régulation de la température de l’eau procédée.
I. Introduction
Maintenir la température de l’eau procédée
constante malgré les perturbations.
2
Grandeur Contrôlée : T°de sortie de l’eau procédée.
Grandeur Manipulée : Q (Débit) de l’eau chauffante.
Perturbations : T°de l’eau chauffante, T°d’entrée de l’eau
procédée, Débit de l’eau procédée … etc.

I. Introduction
3
Exemple 1

I. Introduction
4
Exemple 2

I. Introduction
5
Exemple 3
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%