Rapport Projet Mars Rover : Asservissement et Simulation
Telechargé par
abdelyousfi123

1
Mars Rover
Réalisé par :
Mohamed Hajji
Ammar Haddad
Abderrahman Yousfi

2
Sommaire :
1. Asservissement en vitesse /position d’un seul moteur en utilisant les outils de Matlab permettant de
simuler en temps réel le système (hardware- in -the loop).
2. Simulation sur Matlab/Simulink de l’asservissement en vitesse /position du robot (4 moteurs).
3. Maquette SolidWorks « actualisée » du robot complet (Sans bras manipulateur ni caméra)
4. Mises en plan « actualisée » avec des coupes pour montrer les détails de la conception.

3
Avant d’entamer ce rapport, nous tenons à présenter nos remerciements les plus sincères à toute
l’équipe pédagogique de l’EMINES. Et par la même occasion, on remercie Monsieur Yvon GAIGNEBET
ainsi que nos trois encadrants, Monsieur LAHNINE Mohammed, Monsieur BABA El Mostafa et
Monsieur Anas Cherradi pour leur aide précieuse et leur disponibilité à tout moment pour répondre
aux diverses questions au sujet du Robot que l'on est en train de concevoir.
Le projet "The Mars Rover" étant le dernier projet du cycle préparatoire intégré de l’Emines représente
un réel défi. Il combine les compétences acquises lors des projets antérieurs ainsi que les
connaissances en programmation, mécanique, électricité, électronique et robotique. Ce projet est
considéré comme une évaluation de compétences efficace, utile et fructueuse car il nous permet de
développer une grande flexibilité et une capacité d'adaptation en travaillant sur un projet réel, avec
un cahier des charges et des contraintes spécifiques.
Le robot Mars-Rover a été conçu pour explorer différents milieux et étudier leurs caractéristiques
physiques telles que le niveau d'humidité, la température et la pression. Il peut également prendre
des photos, saisir des objets et les transporter à l'utilisateur pour analyse, tout en restant à l'abri et en
surveillant la mission.
Dans ce rapport, nous allons présenter la maquette SolidWorks actualisée du robot ainsi que
l’asservissement d’un moteur à l’aide de la technique hardware in the loop et finalement la simulation
de l’asservissement des 4 moteurs du robots.
Remerciement :
Introduction :

4
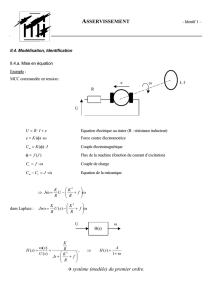
Asservissement en vitesse /position d’un seul moteur en
utilisant les outils de Matlab permettant de simuler en
temps réel le système (hardware- in -the loop).
Pour réaliser l’acquisition de la réponse indicielle, on réalise les modèles suivants, le premier étant le
modèle en boucle ouverte, le deuxième c’est le modèle en boucle fermée, cad qui permet d’asservir le moteur en
vitesse et en position avec la possibilité de modifier les coefficients Kp, Ki et Kd de l’asservissement :
On réalise un asservissement de vitesse d’un seul moteur de la Mars Rover en utilisant les outils de Matlab
permettant de simuler en temps réel le système (hardware- in -the loop):

5
La réponse mesurée en vitesse d’un moteur avec les
coefficients du correcteur proposé :
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%