télécharger

Filtrage de Kalman
et aperçu probabiliste

2
L’idée
•Faire coïncider deux modèles
–Modifier le moins possible de paramètres
–Problème : Paramètres très nombreux
• Effet d’un bouton sur le modèle
•Ajustement des autres boutons
Problème exponentiel
• Deux angles d’attaque possibles
–Méthodes logiques
•Logiques qualitatives et non-monotones
–Méthodes numériques
•Filtrage de Kalman
•Réseaux bayésiens

3
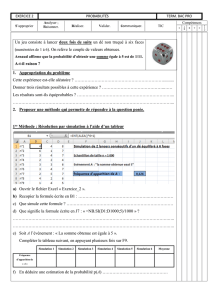
Filtre Kalman
ERREURS DU
SYSTÈME
ERREURS DE
MESURES
SYSTÈME
DYNAMIQUE
TRANSDUCTEUR DE
MESURES
SYSTÈME
DYNAMIQUE
VRAI MODÈLE
CONTRÔLES
FILTRE DE
KALMAN
MESURES
OBSERVÉES ÉTAT
ESTIMÉ
OPTIMAL
x
ˆ
w
u
z
v

4
Utilisation « classique »
•Estimation de systèmes dynamiques
(trajectoires par exemple)
•Domaines
–Fusion de données multi-capteurs
–Aérospatiale
–Aéronautique (calcul de position de cibles)
–Océanographie
–Météorologie
–Hydrologie
–Identification du langage
–...

5
Caractéristiques
•Algorithme de traitement de données
–Filtre : opérations sur un signal
–Récursif
–Linéaire*
–Optimal
–Temps réel
• Estimation d’états de systèmes dynamiques
dans un environnement bruité
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
1
/
32
100%