Bases - chabotsi

PS91 – Bases de coordonnées
Simon CHABOT
5 octobre 2009
Table des matières
1 Coordonnées polaires – (2D) 2
1.1 Calcul des dérivées de vecteurs... . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Expression de la vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Expression de l’accélération . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Coordonnées cylindriques – (3D) 3
2.1 Expression de la vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Expression de l’accélération . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3 Coordonnées sphériques – (3D) 4
3.1 Expression de la vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
4 Passer d’une base à une autre 5
4.1 Des coordonnées cartésiennes aux coordonnées sphériques . . . . . . . . . . . . . 5
4.2 Des coordonnées sphériques aux coordonnées cartésiennes . . . . . . . . . . . . . 5
4.3 Des coordonnées cartésiennes aux coordonnées cylindriques . . . . . . . . . . . . 5
4.4 Des coordonnées cylindriques aux coordonnées cartésiennes . . . . . . . . . . . . 5
4.5 Des coordonnées polaires aux coordonnées cartésiennes . . . . . . . . . . . . . . . 6
4.6 Des coordonnées cartésiennes aux coordonnées polaires . . . . . . . . . . . . . . . 6
1

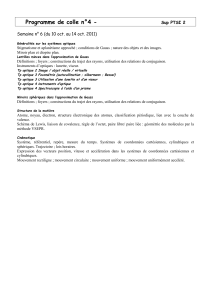
1 Coordonnées polaires – (2D)
FIGURE 1 – Représentation d’un point M en coordonnées polaires
On a : −−→
OM =ρ−→
eρ
1.1 Calcul des dérivées de vecteurs...
Projection de −→
eρdans la base cartésienne.
−→
eρ= cos φ−→
ex+ sin φ−→
ey
→˙
−→
eρ=˙
φ× − sin φ−→
ex+˙
φ×cos φ−→
ey
=˙
φ(−sin φ−→
ex+ cos φ−→
ey)
=˙
φ−→
eφ
Projection de −→
eφdans la base cartésienne
˙
−→
eφ=˙
φ× − cos φ−→
ex−˙
φ×sin φ−→
ey
=˙
φ(−cos φ−→
ex−sin φ−→
ey)
=˙
φ−→
eρ
D’où : ˙
−→
eρ=˙
φ−→
eφet ˙
−→
eφ=−˙
φ−→
eρ
2

1.2 Expression de la vitesse
−→
v=˙
−−→
OM
= ˙ρ−→
eρ+ρ˙
−→
eρ
= ˙ρ−→
eρ+ρ˙
φ−→
eφ
1.3 Expression de l’accélération
−→
a=˙
−→
v
= ¨ρ−→
eρ+ ˙ρ˙
−→
eρ+ ˙ρ˙
φ−→
eφ+ρ¨
φ−→
eφ+ρ˙
φ˙
−→
eφ
= ¨ρ−→
eρ+ ˙ρ˙
φ−→
eφ+ ˙ρ˙
φ−→
eφ+ρ¨
φ−→
eφ−ρ˙
φ2−→
eρ
=¨ρ−ρ˙
φ2−→
eρ+2 ˙ρ˙
φ+ρ¨
φ−→
eφ
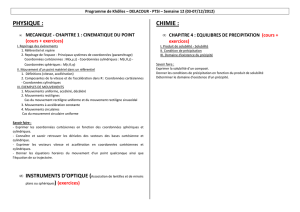
2 Coordonnées cylindriques – (3D)
FIGURE 2 – Représentation d’un point M en coordonnées cylindriques
On a : −−→
OM =ρ−→
eρ+z−→
ez
2.1 Expression de la vitesse
De façon à analogue à la précédente, on trouve : −→
v= ˙ρ−→
eρ+ρ˙
φ−→
eφ+ ˙z−→
ez
3

2.2 Expression de l’accélération
De même : −→
a=¨ρ−ρ˙
φ2−→
eρ+2 ˙ρ˙
φ+ρ¨
φ−→
eφ+ ¨z−→
ez
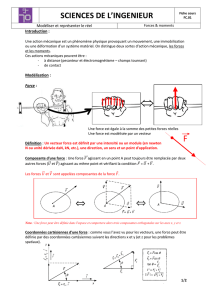
3 Coordonnées sphériques – (3D)
FIGURE 3 – Représentation d’un point M en coordonnées sphériques
On a : −−→
OM =ρ−→
eρ
3.1 Expression de la vitesse
−→
v= ˙ρ−→
eρ+ρ˙
θ−→
eθ+ρ˙
φsin θ−→
eφ
4 Passer d’une base à une autre
4.1 Des coordonnées cartésiennes aux coordonnées sphériques
ρ=px2+y2+z2
θ= arccos z
ρ
φ=(arccos x2
x2+y2Si y>0
2π−arccos x2
x2+y2Si y < 0
4

4.2 Des coordonnées sphériques aux coordonnées cartésiennes
x=ρsin θcos φ
y=ρsin θsin φ
y=ρcos θ
4.3 Des coordonnées cartésiennes aux coordonnées cylindriques
ρ=px2+y2
φ= arctan y
x
z=z
4.4 Des coordonnées cylindriques aux coordonnées cartésiennes
x=ρcos φ
y=ρsin φ
z=z
4.5 Des coordonnées polaires aux coordonnées cartésiennes
x=ρcos φ
y=ρsin φ
4.6 Des coordonnées cartésiennes aux coordonnées polaires
ρ=px2+y2
φ= arctan y
x
5
1
/
5
100%