Dynamique 1 - Laboratoire de Météorologie Dynamique

Dynamique Atmosphérique 1
Vent à l’équilibre
1 Introduction
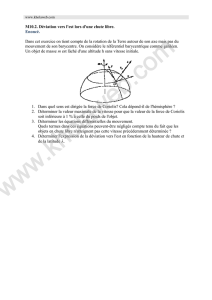
1.1 Système de coordonnées, repère local
#„
# „
# „
fix
e
abso
l
ue
t
ou
r
nan
t
r
e
l
a
tiv
e
#„

H
C
M
k
i
j
r
a
Pôle
nord
équateur
2 Équation du mouvement horizontal
#„
#„
massiques
2.1 Forces apparentes

2.1.1 Dérivation mathématique
#„
absolue
relative
#„
| #„
| #„
#„
# „
#„
# „
#„
#„
#„
# „
#„
# „
#„
#„
vitesse d’entrainement #„
#„
#„
#„
| #„
#„
#„
#„
#„
# „
#„
#„
# „
# „
#„
#„
#„
#„
#„
# „
acc
élér
a
ti
on
r
e
l
a
tiv
e
acc
élér
a
ti
on de Co
ri
o
li
s
acc
élér
a
ti
on d
’
en
tr
a
i
nemen
t
#„
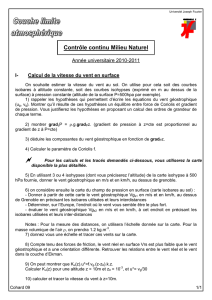
2.1.2 Pesanteur et équilibre d’un point posé sur le sol
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„
#„

Equateur
Pôle
H
C
M
R
G
g
ae
er
2.1.3 Force de Coriolis : mouvement vers l’est
#„
#„
#„
#„
# „
#„
#„

2.1.4 Force de Coriolis : mouvement vers le nord
#„
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%